行車視距在道路設計中的運用
2023-03-10 16:26:46步佳澤
交通科技與管理 2023年3期
步佳澤
(杭州蕭山交通規劃設計研究院有限公司,浙江 杭州 311200)
0 引言
行車視距是道路設計中的重要內容,其計算結果的準確性關系到道路設計的可行性及道路投入使用后的安全性,屬于一個綜合性指標。在道路設計中開展行車視距的計算與設計,優化調整道路的行車視距,使駕駛員在駕駛汽車過程中,可以及時發現道路前方的危險,進而及時采取停車、超車、錯車等應對措施,確保汽車駕駛安全。所以,針對行車視距在道路設計中的運用分析,對于提高道路行車安全性有著重要價值。
1 行車視距在道路設計中運用需要考慮的問題
1.1 行車視距大小問題
行車視距是駕駛員在停車、超車、錯車等過程中的可視距離,從道路設計應用行車視距的角度來看,還需考慮到道路在平面、彎道、縱坡的條件下,行車視距的設計與計算,從設計層面保障道路投入使用后的行車視距安全。例如,在道路坡頂設計中,應著重考慮行車視距問題,汽車距離坡頂越近,駕駛員的行車視距越小,坡頂遮擋兩側道路車輛駕駛員的視覺,也就是說汽車在接近坡頂位置的行車視距趨于零,一旦兩輛車的會車視距小于最小安全距離,就會增加兩車碰撞的概率。所以道路設計要根據安全行車視距的要求,進行坡頂凸形豎曲線半徑的調整,達到增加會車視距的目的。再者,公路等級、設計速度的不同,對于行車視距的標準要求也不相同,需要遵循《公路工程技術標準》中行車視距設計要求進行道路設計。
1.2 視覺感受問題
道路設計中在確定公路功能與等級后,以設計速度作為基礎控制參數進行路線的設計,并遵循道路設計相關的標準規范,結合道路平或豎曲線半徑、視距、縱坡等幾何線形的指標,通過這些指標協調控制完成整個道路設計工作。與設計速度相關的事項有地形、地質、公路功能和技術等級、運行速度等。不同等級公路設計速度不同,行車視距的大小也不相同,比如停車視距,高速公路及一級公路,設計速度為120 km/h時停車視距為210 m,設計速度為100 km/h時停車視距為160 m,超車視距與會車視距在一級公路以下的公路設計中也設定了要求,如設計速度為80 km/h時停車視距110 m,會車視距220 m,超車視距550 m[1]。公路設計速度是一個基準數值,也是汽車駕駛員行車速度的參考值,實際的行車速度受到道路條件、駕駛員駕駛能力與經驗、汽車性能、天氣狀況、道路通行情況等多方面的影響,如在長直線路段,行車視覺感受良好,運行速度會大于設計速度,在曲線段行車視覺感受較差,汽車會小于設計速度行駛。駕駛員在汽車高速行駛狀態下,動視力與靜視力相比下降10%~20%,駕駛條件不良的情況下,下降可達到30%~40%,車速越快,動視力下降就越大,有效視野范圍就越小。
1.3 駕駛錯覺問題
錯覺是指人出現了錯誤的認知,知覺未能準確地反映出外部事物的變化,甚至是人的大腦已經做出了錯覺的判斷,但在行動上卻無法做出改變。駕駛錯覺是引發交通事故的原因之一,駕駛人員長時間駕駛昏昏欲睡,或者是身體出現問題,以及精神狀態不佳等,導致感知失誤,使大腦做出錯誤判斷,形成較高的行車安全風險。比如,在小于半圓圓弧曲線路段上行車,駕駛員視覺感知的彎度小于道路實際彎度。在下坡路段,隨著車輛不斷向前行駛,駕駛員視覺感知路面傾斜度逐漸降低,易形成提前完成下坡的錯覺。駕駛錯覺主導著駕駛員的駕駛行為,為了消除環境、彎道、坡道、曲線道路等對駕駛員視覺的誤導,應在道路平曲線、凹豎曲線、凸豎曲線等線形設計中,針對影響行車視距的地點,準確地計算出行車視距,如平面視距、縱斷面視距、橋下視距等。同時在易形成駕駛錯覺的路段,設置標志牌、路面劃線等,提前提醒駕駛人員注意保持行車視距。
2 道路設計中行車視距計算方法
2.1 停車視距計算
停車視距由反應距離、制動距離、安全距離組成,其中反應距離計算公式為:
式中,v——行車速度(km/h),駕駛員發現前方阻礙的感覺時間取1.5 s,制動反應時間取1.0 s,t=1.5+1.0。
制動距離:
停車視距ST=S1+S2+S0,S0為安全距離,取值5~10 m。
2.2 會車視距計算
會車視距是指道路不同方向兩輛汽車行駛相遇,從發現至安全停車的最短距離,主要由反應距離、制動距離、安全距離組成,與停車視距組成相同,但會車視距為雙向車輛采取制動輛車安全停止的最小距離,會車視距SH≈2ST。
2.3 超車視距計算
超車是指后車超越前車,超車視距為其最小的通視距離,構成分為以下四個階段。
(1)加速行駛距離:
式中,v0——被超車輛的速度;t1——加速時間,a——平均加速度。
(2)超車汽車在對向車道行駛的距離:
式中,v——超車汽車行駛速度;t2——加速時間。
(3)超車結束后兩輛車之間的安全距離:S3取值為15~100 m。
(4)整個超車過程中,對向汽車的行駛距離:
超車視距Sc等于上述四個階段的距離之和,該值為理想值,在實際計算中S4計算公式中的t2建議取2/3t2,S2也取2/3S2,以進行超車視距的折減,從而計算出最小必要超車視距[2]。
3 行車視距在道路設計中的應用
3.1 平面設計中的應用
3.1.1 平曲線臨界半徑計算
在道路平曲線半徑設計中,需要其具有足夠大距離,即駕駛員在進入平面曲線路段起始點后,通視區域可達到平面曲線的另一側,平面曲線的中間位置不會影響到駕駛員的駕駛視線,也就是平面視距,以此保證道路平面具有安全有效的行車視距。在平面設計行車視距計算中,平曲線半徑取臨界半徑R,該值為從車道中心線開始至視線阻礙邊緣的側向距離,可以得出下式:
式中,S——行車視距;h——橫凈距離。
在汽車左轉彎與右轉彎的情況下,h采用以下公式進行計算,假設橫斷面范圍內視線寬度為標準值,則
式中,W、L、m、a——行車道路寬度、路肩寬度、中間帶寬度與側帶寬度。使用R計算出道路平曲線的臨界半徑。
3.1.2 計算注意事項
道路設計需要綜合考慮設計路段的地質條件、地形地勢,以及該路段周邊的構造物等。在平曲線半徑計算后,結合設計道路的實際情況選擇了較小半徑,如果該值小于平曲線的臨界半徑,則要進行道路平面最大橫凈距的分析判斷,在最小行車視距的條件下,最大橫凈距區域內是否存在遮擋視線的事物,如果存在阻礙視線的遮擋物,需進行視距寬度計算。設定h0為曲線內側至遮擋物的距離,在h≤h0時,平曲線半徑可行;當h>h0時,半徑不符合要求,應去除h-h0的寬度差,將曲線內側妨礙視線的遮擋物拆除,如房屋、設施等,樹木進行稀疏砍伐[3]。如果曲線內側遮擋物是道路中間帶的設施,在中間帶兩側均勻加寬,以增加行車視距的寬度。
3.2 縱斷面設計中的應用
3.2.1 凸形豎曲線半徑計算
凸形豎曲線設計的關鍵點是汽車在向坡頂行駛過程中,至坡頂一定的距離后,駕駛員的駕駛視線受到坡頂的阻擋,在坡頂的另一側形成視覺盲區。凸形豎曲線設計應綜合考慮汽車上坡與下坡的安全性和舒適性,并要準確地計算出凸形豎曲線半徑,保證駕駛的良好視野與安全的行車視距。在豎曲線長度L>S的條件下,Rmin=S2/4,在L<S情況下,最小豎曲線半徑為:
式中,S——行車視距;Δi——縱坡面坡度值的代數和。
3.2.2 凹形豎曲線半徑計算
凹形豎曲線道路設計中,行車視距為橋下視距,汽車從上坡處行駛至坡底,然后再向上行駛,汽車在上坡處向下行駛過程中,駕駛員在對向坡面上行造成視覺盲區。凹形豎曲線半徑在計算中,不僅要考慮到行車視距問題,還要特別注意限制離心力,汽車夜間行駛車燈的照射距離與行車的安全性及舒適性。
假設在夜間汽車行駛至凹形豎曲線路段,在車燈照射、汽車行駛等狀態下,汽車的行車視距仍然要在安全值的范圍內,設車頭燈距離地面高度為0.75 m,燈光的擴散角為1°,在豎曲線長度L≥S的條件下:
在L<S條件下:
汽車位于橋梁結構物下方的凹形豎曲線上時,橋梁下方的結構會遮擋視線,設駕駛員視線高1.2 m,障礙物高度取最大值0.75 m,橋下凈空取4.5 m。
S≤L的情況下:
S>L的條件下:
3.2.3 計算結果分析
基于不同的豎曲線長度與行車視距條件下,進行道路凸形豎曲線與凹形豎曲線最小豎曲線半徑的計算,根據公路不同的計算行車速度,及對應的視距S值,進行最小豎曲線半徑Rmin的計算,并與《公路路線設計規范》中的采用值進行比較,確定滿足行車視距要求的Rmin值。采用上述公式及取值,最終計算結果如表1所示,計算出的Rmin值比規范中的采用值略大。
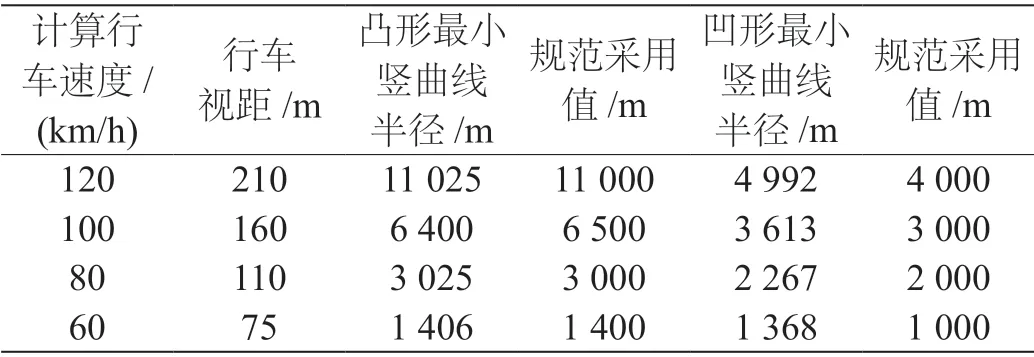
表1 不同行車速度下滿足行車視距的最小豎曲線半徑
在實際的道路設計中,行車視距條件允許的情況下,不建議取規范中的最小值。如果道路縱斷面設計受到設計路段地形、地質、周圍構造物與樹木等的影響,需使用規范設定的最小豎曲線半徑,則要全面清除凸形或凹形豎曲線視距寬度范圍內的遮擋物,盡可能保證視距寬度滿足行車視距的要求。
4 道路設計中行車視距輔助性設計措施
4.1 交通標志輔助設計
道路交通標志具有提醒、警示、組織交通等作用,在道路設計中合理設置交通標志,可有效改善視距,彌補道路行車視距的不足。比如,在視距不良的道路上,專門設置視距不良慢行標志,在小半徑彎道且存在視覺障礙的路段,沿著線路布設線性誘導標。在視覺障礙物、轉彎較多的路段,設置提示減速標志,提醒駕駛員減速慢行,注意駕駛安全,避免長時間駕駛引起的駕駛錯覺與視覺感受偏差。通過在道路上設計交通警示標志,實現對道路設計各要素的協調,促使駕駛員控制車速、提高注意力,改善駕駛員的運行視距,提高道路行車視距設計的質量。道路標線對于行車視距也有著良好的影響,如防滑標線減少汽車的制動距離,確認距離線提醒駕駛人員在轉彎、上坡、下坡等道路上的具體位置,促使其保持安全的行車視距,防止駕駛錯覺引發的交通事故。
4.2 沿線景觀輔助設計
汽車駕駛員在道路上駕駛過程中,視野受到汽車結構的限制,前方事物在視覺中占比較少,路面占比較多,視野較窄,并且汽車行駛速度越快,駕駛員的視野就越窄。因此在道路設計中要充分準確運用行車視距,切實做好平曲線、平面交叉處、凹豎曲線、凸豎曲線等行車視距的計算,以保證曲線最小半徑達到行車視距的要求[4]。在保證道路線形設計質量的基礎上,適當地運用視覺誘導,建立一個連續性的駕駛視覺,聚焦駕駛員的注意力,而道路景觀是影響駕駛員視覺連續性的關鍵。一方面,道路兩側的自然景觀整體協調,不可有扭曲、跳躍的表現。另一方面,道路上的廣告牌、構造物等顏色不可過于艷麗、圖案不可夸張,無須過多裝飾,保證道路視覺的純凈,避免分散駕駛員的注意力,導致感覺與制動反應時間的增加,不利于駕駛安全。
5 結語
道路設計中影響行車視距的因素較多,如地形條件、氣候變化、周邊構造物,以及駕駛員本身駕駛能力,汽車實際的運行速度等。在道路設計中,須從道路的實際出發,綜合考慮駕駛員的視覺感受、駕駛錯覺,以及道路沿線的地質條件、周邊環境、氣候、構造物等工程因素,因地制宜,準確地計算出行車視距,以提高道路平面與縱斷面行車視距設計的質量,保障道路投入運行后的安全性。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
汽車電器(2018年1期)2018-06-05 01:22:54
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
公民與法治(2016年4期)2016-05-17 04:09:26
