基于直覺模糊貝葉斯網絡的HUD 系統多階段任務可靠性分析
2023-03-28 04:32:28張帆孫紫荊肖國松劉嘉琛王鵬
航空學報 2023年4期
關鍵詞:系統
張帆,孫紫荊,肖國松,劉嘉琛,王鵬,*
1.民航航空器適航審定技術重點實驗室,天津 300300
2.中國民航大學 安全科學與工程學院,天津 300300
平視顯示器(Head Up Display,HUD)是一項航行新技術,能夠將飛行所需數據信息集成顯示在飛行員前方顯示面板上,使飛行員能夠以平視狀態獲取必要飛行及導引信息,及時修正飛行狀態,實現精細化飛行[1]。中國民航局《平視顯示器應用發展路線圖》提出,未來我國主要干線航空飛機制造商,對其新設計的機型均需提供HUD 安裝選項,其中部分制造商要將HUD 設備作為標準配置[1]。
目前,中國自主研發的國產HUD 系統尚在起步階段,部分關鍵模塊及元器件缺乏服役經驗、可靠性數據積累不足,難以為可靠性分析提供可信的底層數據支撐,存在亟待解決的認知不確定性問題。此外,HUD 系統在工作中存在多階段運行特點,各工作階段系統構成存在差異而元件狀態相互關聯。同時可能存在的共因失效問題及其相關的概率數據模糊,也使得可靠性分析中的不確定問題愈加嚴重,作為可靠性分析領域的典型問題,忽視共因失效可能造成最終的分析結果的較大偏差。
在底層可靠性數據缺失問題方面,模糊理論是處理系統認知不確定性的有效方法,在解決概率數據不完全、不確定等問題上成果顯著。模糊理論在應用中多與專家啟發式技術相結合,用于專家意見的聚合,能夠有效處理專家共識不足或意見偏頗帶來的不確定性問題。文獻[2]將模糊理論與故障樹分析相結合的模糊故障樹分析(Fuzzy Fault Tree Analysis, FFTA)方法應用于風險評估分析技術,文獻[3]將FFTA 方法應用于儲油罐失效概率分析,文獻[4]對FFTA 方法進一步擴展改進,用于評估儲油罐火災風險,文獻[5]將模糊集的概念擴展到直覺模糊集,提出了一種基于直覺FFTA 的方法,并將其應用于油罐系統部件的失效評估。
而在多階段任務系統的可靠性模型建立及共因失效的表征問題上,基于概率論與圖論的貝葉斯網絡(Bayesian Network, BN)在事件邏輯關系描述與概率推理方面具有更大優勢,在安全風險分析與可靠性分析領域應用廣泛[3,6-9]。在貝葉斯網絡與模糊理論的交叉研究方面,文獻[10]將模糊貝葉斯網絡納入人為因素分析框架,處理事故中人為錯誤和組織失誤的相互依賴性、不確定性和數據不足等問題,文獻[11]提出基于模糊貝葉斯方法的不確定環境下易燃液體罐車實時風險分析。文獻[12]利用考慮專家權重的方法對模糊數進行綜合,進一步進行BN 計算得到瓦斯泄漏發生概率。基于以往研究,模糊貝葉斯網絡在可靠性分析領域有很強的適用性,而在HUD 系統可靠性分析中還未得到應用。
以模糊理論支撐HUD 系統多階段任務可靠性分析的過程,關鍵即是以模糊理論對系統多階段任務的貝葉斯網絡模型的輸入數據進行處理的過程。依據前述研究,這一過程需要經過專家語義評價、評價模糊化、模糊聚合、解模糊處理等步驟。在語義評價階段,對于復雜系統,評價人員往往無法直接給出模糊對象的隸屬度進行直接準確的評估,即專家評價本身也存在不確定,而前述研究工作很少將專家評價本身的準確性納入考慮。在模糊數聚合階段,多重模糊數據處理存在不確定性積累問題,即聚合后模糊數的區間范圍大于最初定義的模糊區間,模糊累積會降低最終解模糊結果的準確性。在解模糊處理階段,需要將聚合所得的直覺模糊數轉換為具體的失效數值,文獻[13]提出的轉換方法已經在多個行業中有諸多應用[14-17],但考慮到不同行業、不同類型設備的概率空間分級標準不同,該方法無法適用于各種模糊數的轉化,采用不適當的模糊區間可能導致計算結果與實際情況有明顯的偏差。
針對專家評價準確性問題,直覺模糊理論作為模糊集的拓展,包括隸屬度、非隸屬度和猶豫度的模糊概念,能夠更好地表達專家意見的模糊性和不確定性[18]。對于多重模糊數據處理中不確定累積問題,文獻[19]在FFTA 模型中引入了Tω 算子,用于天然氣運輸船機械推進系統的可靠性評估。文獻[20]將基于Tω 的模糊算法進行擴展,提出了直覺模糊故障樹分析(Intuitionistic Fuzzy Fault Tree Analysis, IFFTA)方法,并將該方法應用于某武器系統可靠性評估。依據前述研究,提出將Tω 算子引入模糊貝葉斯網絡的分析,以減少模糊性積累帶來的計算偏差。而在模糊數轉化方面,結合民機領域適航當局與工業界普遍接收的定性概率術語,提出更適用于航電設備的模糊區間分級與轉化算法。
綜上,針對國產HUD 系統可靠性數據積累不足、難以為可靠性分析提供底層數據支撐的問題,提出基于直覺模糊貝葉斯網絡的航電設備多階段任務可靠性分析方法,并將可能出現的共因失效納入考慮,能夠實現系統基本事件概率數據模糊與共因事件概率數據模糊條件下的可靠性分析。
1 基本理論
HUD 系統的可靠性分析工作存在2 方面關鍵問題,即系統多階段任務的表征與底層可靠性數據確定。系統任務表征方面,需要構建能夠反映系統多階段運行行為以及可能出現的共因失效影響的綜合貝葉斯網絡模型。而在可靠性數據確定方面,對于數據模糊的底層事件,依據直覺模糊理論進行模糊數據確定,以Tω 算子降低模糊累積影響。
1.1 貝葉斯網絡
貝葉斯網絡(Bayesian Networks, BN)是以概率論和圖論為基礎的不確定推理模型,包括有向無環圖及相應的條件概率關系。一個n節點的貝葉斯網絡表示為,其中,E為網絡各節點之間的有向邊,Ω={X1,X2,…,Xn}為網絡中的變量,則即表示具有n個節點的有向無環網絡結構;P為與網絡中節點所對應的條件概率分布(Conditional Probabilities Distribution,CPD)或條件概率表(Conditional Probabilities Table,CPT)。
對于網絡中的節點Xi與Xj,有向邊由Xj指向Xi則節點Xi為Xj的子節點、節點Xj為Xi的父節點。沒有父節點的節點稱為根節點,沒有子節點的節點稱為葉節點。以pa(Xi)表示Xi的父節點集合,以A(Xi)表示Xi的非后代節點集合,若給定pa(Xi),則Xi與A(Xi)條件獨立,即
則基于貝葉斯網絡的條件獨立性,條件概率分布可以表示為P{Xi|pa(Xi)}。設定網絡中各節點對應的CPD 或CPT,即可得所有網絡節點的聯合概率分布:
貝葉斯網絡推理已有諸多成熟算法進行概率推理與最大后驗概率解釋[21-26],在構建系統貝葉斯網絡模型后可以依據網絡節點聯合概率分布計算系統可靠度:
1.2 多階段任務系統
多階段任務系統(Phased-Mission System,PMS)包含多個不重疊子階段,系統在各個子階段中依次執行指定任務。在不同階段中,系統配置形式、失效標準等可能不同。在后續研究中,PMS 系統遵循以下基本假設:① 系統遵循二態假設,即系統與組成元件都只有“正常”與“失效”2 種狀態;② 元件失效不可修復,一旦某元件在運行中失效,則在后續任務中都不可用;③ 系統各階段間具有連續性,元件在某一階段開始時的狀態與上一階段結束時狀態相同;④ 系統各階段間的切換過程不存在失效;⑤ 所有階段任務成功則認為系統整體任務成功。
1.3 直覺模糊理論
直覺模糊集(Intuitionistic Fuzzy Set,IFS)理論是傳統模糊集理論的擴展,相比傳統模糊集理論,IFS 理論考慮了模糊數隸屬度、非隸屬度以及猶豫度,直覺模糊集即表示為一個三元有序集。
式 中::X→[0,1]與νA?:X→[0,1]分 別為隸 屬度與非隸屬度。滿足:
(x)∈定義為x∈的直覺模糊指標,即x對的猶豫度,表示為
式中:0 <(x)<1,?x∈X。實數R 的IFS 如圖1 所示,(x)為凸模糊曲線,上半連續,而(x)為凹模糊曲線,下半連續。當x取x0時,(x0)即為x0對A的猶豫度。當(x)=0,IFS 即為傳統的模糊集。
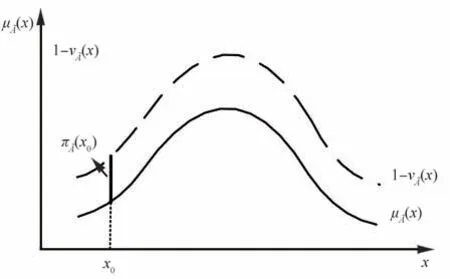
圖1 實數R 的IFSFig. 1 IFS of R
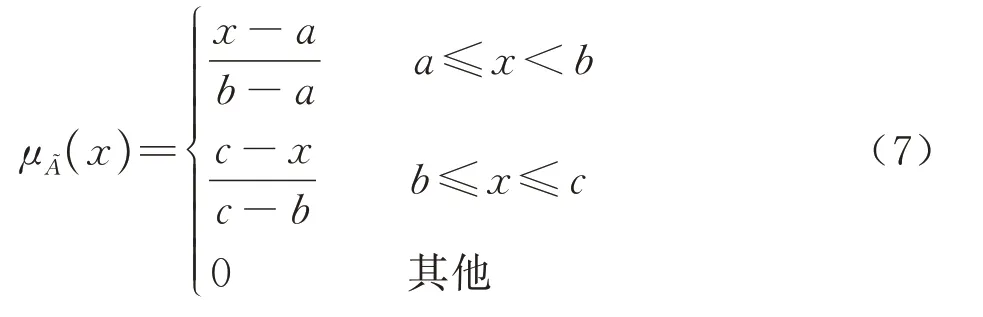
作為最常用的三角模糊數的擴展,三角直覺模糊數(Triangular Intuitionistic Fuzzy Set,TIFS)表示為=(a,b,c;a',b',c'),其隸屬度函數與非隸屬度函數如下:
1.4 基于Tω 的模糊集運算
Tω 范數是T 范數的經典形式之一,它能夠減少模糊性的積累,是不確定情況下復雜系統評價算法中常用的算子。
對 于2 個TIFN,=(a1,b1,c1;a'1,b'1,c'1)和=(a2,b2,c2;a'2,b'2,c'2),其基本運算規則如表1所示,其中λ為系數。
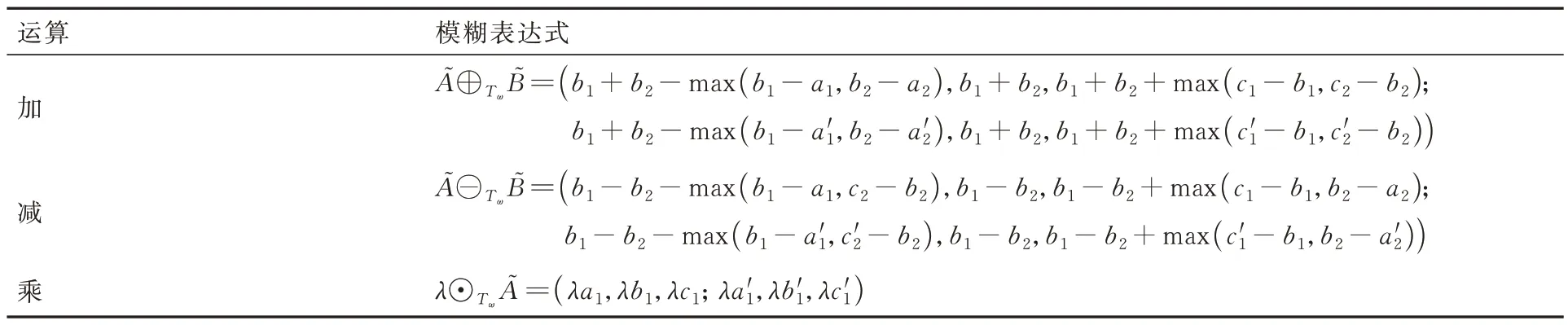
表1 基于Tω 的2 個TIFN 運算規則Table 1 Two TIFN operation rules based on Tω
2 基于直覺模糊貝葉斯網絡的多階段任務系統可靠性分析模型
提出基于直覺模糊貝葉斯網絡(Intuitionistic Fuzzy Bayesian Networks,TIBN)的可靠性分析方法,包括3 大步驟,即貝葉斯網絡模型構建、對模糊可靠性支撐數據的處理、基于貝葉斯網絡的可靠性分析,分析流程如圖2 所示。

圖2 基于TIBN 的可靠性分析方法Fig. 2 Reliability analysis method based on TIBN
首先依據待分析系統及其任務,建立多階段任務系統的貝葉斯網絡模型,明確網絡中的葉節點。其次依據所提基于直覺模糊理論的分析方法對系統中難以判定失效數據的模糊節點進行分析,其中包括對失效數據模糊的系統元件以及共因失效事件的定量數據估計。最后依據貝葉斯網絡推理算法對系統任務可靠性進行計算。
2.1 考慮共因失效的多階段任務系統貝葉斯網絡模型構建
2.1.1 多階段任務系統貝葉斯網絡模型構建
多階段任務系統的貝葉斯網絡模型由不同階段各自的分階段模型整合而成。各階段中系統的貝葉斯網絡模型構建與常見的不考慮階段劃分的系統BN 模型構建過程相同,首先需對系統組成以及運行中各元件/模塊的邏輯關系進行分析,劃分元件、組件、模塊、子系統、系統等不同層級,確定合理的分析粒度以及各層級的網絡節點,而后以有向邊對各層級節點進行連結。此外,如某一層級中存在節點間因果或依賴關系,也應根據BN 網絡構建規則進行連結。
在得到各運行階段的BN 網絡模型后,依據運行次序對各BN 模型進行整合,形成PMS-BN 模型。當某一元件/模塊在不止一個運行階段中發揮作用,該元件節點在整合的BN 模型中不能合并,仍應以不同的節點表示。而后以有向邊順次連結在不同階段中重復出現的元件對應的各個節點。
需要注意的是,以有向邊連結重復出現的元件對應的節點,是僅對所有根節點而言的,對于中間層節點,即使某一模塊或子系統對應的節點在不同階段中都出現,也不需要將其與上一階段該模塊節點直接連接。
2.1.2 共因失效事件模型
在PMS-BN 模型基礎上,考慮共因失效問題對模型進行擴展,形成PCCF-PMS(Probabilistic Common Cause Failure-Phased Mission System)模型。首先構建共因空間節點,將其作為所有可能受到共因事件影響的元件節點的父節點引入網絡中,即網絡結構的擴展。其次對共因空間節點及可能受到共因事件影響的元件節點進行條件概率關系的更新,即網絡參數修正。
1)共因空間節點構建
構建一個多狀態節點CCE(Common CauseEk)表征所有可能出現的共因事件,包含各個共因事件發生或不發生的不同組合狀態。若系統運行中可能受n個共因事件CCi(i=0, 1, 2,…,n)的影響,則共因空間包含2n個子空間且互不相交,記為CCEk(k=0,1,…,2n-1)。則:
將CCE 節點引入網絡中,所有可能受到共因事件影響的元件節點均由PMS-BN 網絡中的根節點變為CCE 節點的子節點。
2)網絡參數更新
系統運行中可能出現的多個共因事件之間可能存在獨立、互斥、相關等不同統計關系,因此在CCE 節點的CPT 參數確定時需要考慮其不同的統計關系。
對于各個共因事件的不同關系,CCE 節點的發生概率如表2 所示。對于CCi=1,有集合S=
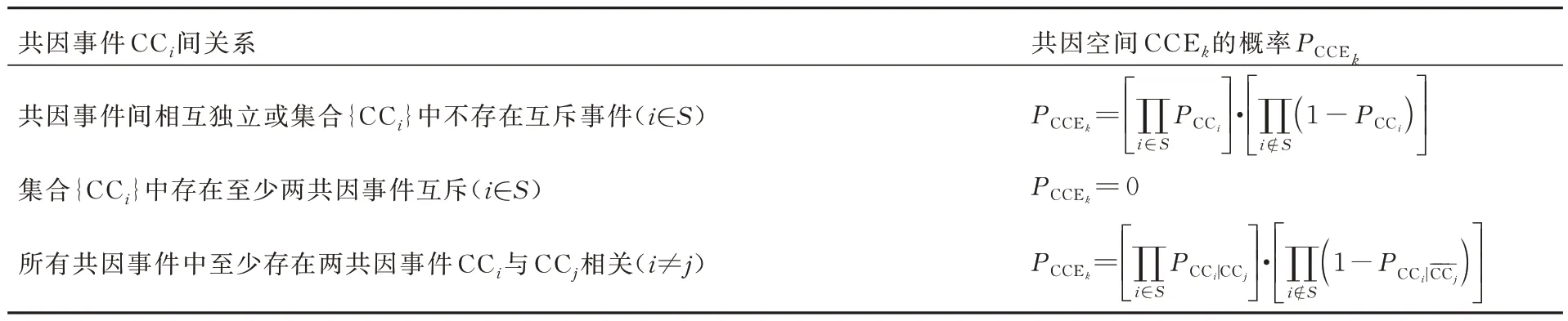
表2 CCE 節點概率分布Table 2 Probability distribution of CCE
在可能受共因事件影響的元件節點CPT 確定方面,計算某一元件的總條件失效概率。
若在共因空間CCEk下,階段j中元件X被m個共因事件(CCj1(X),CCj2(X),…,CCjm(X))影響,則元件X在階段j之前都未失效的條件下,在階段j中失效的總條件概率QjkX為
式中:qjX為元件X在j中的獨立失效概率;qjiX為在階段j中影響元件X的第i個共因事件發生的條件下,元件X的條件失效概率,也可記為qX|CCji(X)。
若某共因事件CCji(X)發生將使得元件X必然失效,則該共因事件為確定型共因事件,令qjiX=
2.2 定性評價的模糊化
專家以定性的語言描述對數據模糊的網絡葉節點的失效可能性進行評估,因此需要將定性評價轉化為[0,1]內的失效模糊區間,即直覺模糊失效數(Intuitionistic Fuzzy Failure Number, IFFN)。定性評價越接近0,即意味著該節點失效可能性越小,反之,越接近1,即該節點越可能失效。
文獻[27]對人類記憶能力進行了普遍估計,即人類做出適當判斷所需的語言表達的正確數量在5~9 個之間[9,28]。在民機適航領域,當使用定性或定量的分析判斷對CCAR 25.1309 條款[29]的符合性時,一般被工程接受的概率術語如表3 所示[30]。因此,綜合考慮民機適航當局與工業界普遍接收的概率術語,以及專家語言評級區間劃分數量的合理性,將失效可能性語言術語定義為5 個級別,分別為 “可能失效”“失效可能較小”“失效可能微小”“失效可能極微小”“極不可能失效”,如表4 所示。

表3 民機系統及設備常用失效概率術語Table 3 Commonly used terms of failure probability for civil aircraft systems and equipment

表4 失效可能性定性分級Table 4 Qualitative classification of failure possibility
采用三角直覺模糊數,依據定義的5 個定性語言分級,以歸納推理方法量化相應的失效可能性數值[5,31-32],如圖3 所示,則失效可能性定性語言與IFFN 對應關系如表5 所示。
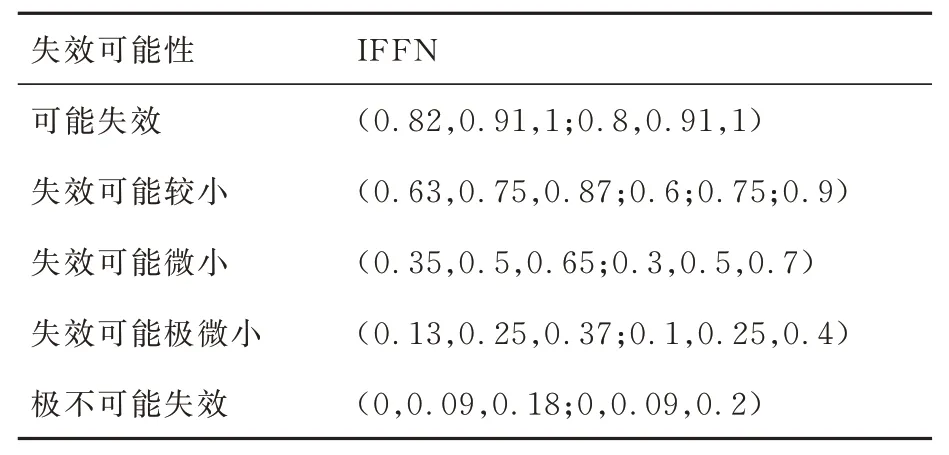
表5 失效可能性與IFFN 對應Table 5 Failure probability corresponding to IFFN
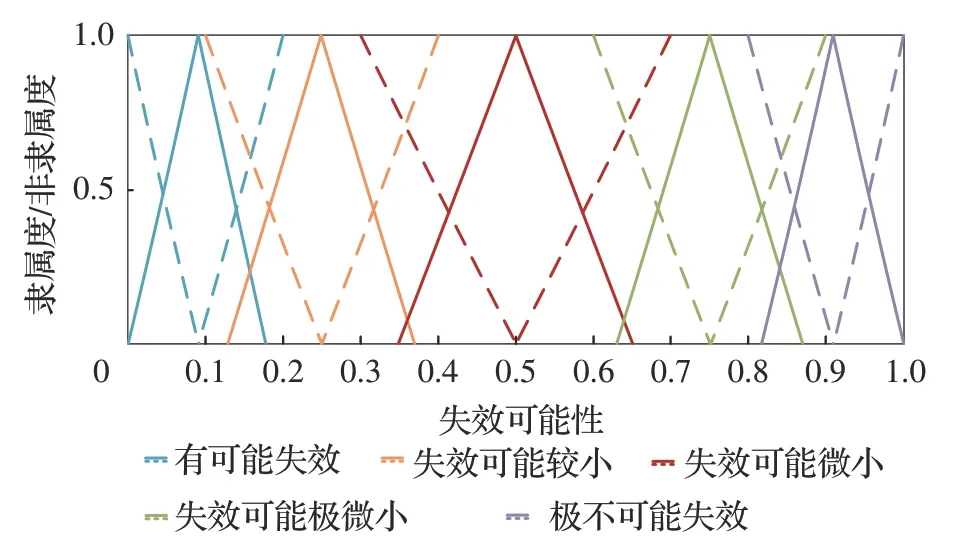
圖3 定性評價的量化Fig. 3 Quantification of qualitative evaluation
2.3 專家評價與意見聚合
2.3.1 專家評價
基于貝葉斯網絡的定量可靠性分析依賴根節點先驗概率與節點CPT,當根節點先驗失效率數據缺乏時,通常需要借助專家的知識及經驗。專家評價的過程可能因個人經驗不同而存在偏差,在進行實際評估分析工作時為避免意見過度趨同,需要選擇不同經歷、職業等的評估人員,有利于提高評估的客觀性與全面性。
此外,專家評價存在偏差,在進行意見聚合時有必要綜合考慮評價人員的基本情況。考慮專業職位、工作時間、教育水平3 個指標確定評價人員權重,計算過程如式(12)和式(13)所示。
xij為專家Ei(i=1,2,…,m)在評價指標j(j=1,2,…,n)下的評分,X為所有評價人員在所有指標下的評分矩陣。
式中:W(Ei)為專家Ei的權重。
2.3.2 基于Tω 的專家意見聚合
多位評估人員針對某一事件的評估結果必然會有一定偏差,因此需要對意見進行聚合以取得共識。不同意見的共識程度與評價專家的重要度都是聚合過程的重要參數,相似聚合法能夠綜合考慮專家權重與意見共識程度,提高匯總結果的可靠性。此外,在意見聚合計算過程中,存在不確定性的累積問題,Tω 范數能夠在保持模糊數形態的同時進行模糊運算,減小可靠性區間的寬度,降低模糊累積影響。
綜上,采用相似聚合法對多個TIFN 進行聚合,同時引入Tω 范數提升聚合準確性。基本過程如圖4 所示。
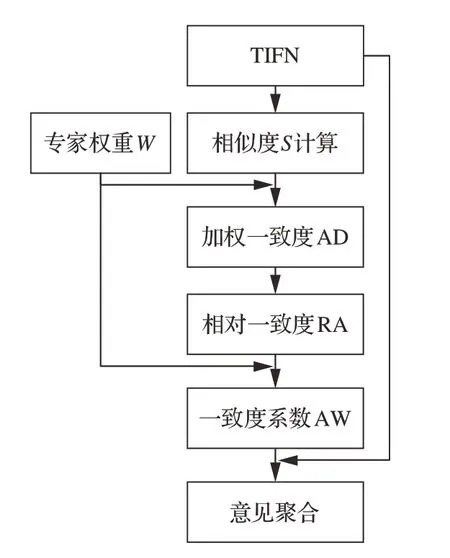
圖4 基于Tω 的專家意見聚合過程Fig. 4 Expert opinion aggregation process based on Tω
1)評價相似度計算
專家Es與專家Ek對某一事件的評估結果轉化為TIFN 分別為與,則兩模糊數的相似度函數S為
2)加權一致度計算
考慮評價人員權重,計算意見一致性。專家Es的加權一致度為
式中:m為專家數量。
3)相對一致度計算
依據加權一致度AD(Es)計算專家Es意見的相對一致度。
4)聚合權重計算
結合專家權重與相對一致度計算專家Es的聚合權重。
式中:β(0≤β≤1)為專家權重與相對一致度的相關因子。
5)基于Tω 算子的意見聚合
基于Tω 算子的專家意見聚合,得到某一事件的綜合模糊數。
2.4 解模糊處理
將專家意見聚合得到的綜合模糊數轉化為失效概率數值包括2 步,即首先將綜合模糊數轉化為0~1 之間的直覺模糊失效概率(Intuitionistic Fuzzy Failure Probability,IFFP),再將IFFP 轉化為失效率數值。
2.4.1 綜合模糊數解模糊
采用質心法將綜合模糊數轉化為直覺模糊失效概率,對于直覺模糊數為隸屬度函數,(x)為非隸屬度函數:
則直覺失效模糊數IFFP 為
對于三角直覺模糊數=(a,b,c;a',b',c'),對應IFFP 為
2.4.2 IFFP 轉化為失效概率
文獻[13]提出模糊失效可能性與失效率的轉化方法,能夠實現人的定性感知與適當物理數值的對應并已經在許多領域的研究中得到應用。但不同行業常用的失效概率分級標準差異,使得該方法并不能完全適用。針對民機適航安全領域普遍接受的概率分級方式,保留文獻[18]提出的人的感知與物理數值對應的合理趨勢,提出相應的改進算法實現IFFP 與失效率(FR)(每飛行小時)的轉化算法,如式(23)和式(24)及圖5 所示。
2.5 基于直覺模糊貝葉斯網絡的定量分析
在構建多階段任務系統的貝葉斯網絡模型并確定數據模糊的葉節點、以融合Tω 算子的IFS理論計算模糊節點失效率之后,依據式(9),結合網絡結構及參數進行系統任務可靠性計算。
3 HUD 系統多階段任務可靠性分析
3.1 HUD 系統
HUD 系統能夠將機上各傳感器信息處理計算后,經光學成像設備投射至飛行員前方的成像板上,飛行員不需低頭查看儀表即能獲取必要飛行狀態信息,以及告警、故障等提示信息,同時能夠實現滑跑起飛指引、拉平指引、進近導引等一系列直觀飛行指引信息顯示。
HUD 系統的基本架構由平視顯示計算機(Head-Up Display Computer,HDC)、平顯成像裝置(Head-Up Display Imaging Device,HID)、折轉顯示儀(Foldable Display Device,FDD)組成。其中HDC 接收大氣數據計算機、慣性基準系統、無線電高度表、儀表著陸系統、微波著陸系統、測距設備、甚高頻全向信標、自動定向儀等諸多傳感器信息并進行處理計算,生成顯示畫面。HID對顯示畫面進行畸變校正,并經過光學結構進行投影。FDD 接收投射的顯示畫面并顯示飛行員。
HUD 系統在全飛行階段為飛行員提供飛行狀態信息顯示與飛行導引。通常,巡航任務在飛機飛行的全任務階段占比最大,而進近任務則最能夠體現HUD 系統的導引功能優勢,以巡航、進近兩運行階段為例進行計算。巡航與進近階段HUD 系統結構如圖6 和圖7 所示。巡航時長為T1=1.2 h,進近時長為T2=0.4 h。對于巡航階段,HUD 系統在數據處理環節進行處理結果確認,確認接口數據傳輸及數據處理結果一致后進行符號畫面生成。對于進近階段,需進行導引能力確認、數據處理結果確認與生成畫面確認并得到一致結果,而后輸出生成畫面。圖中藍色數據流為HUD 系統實現畫面顯示功能的主數據流,綠色數據流用于數據確認模塊實現確認功能。

圖6 巡航階段HUD 系統結構Fig. 6 HUD system structure in cruise stage
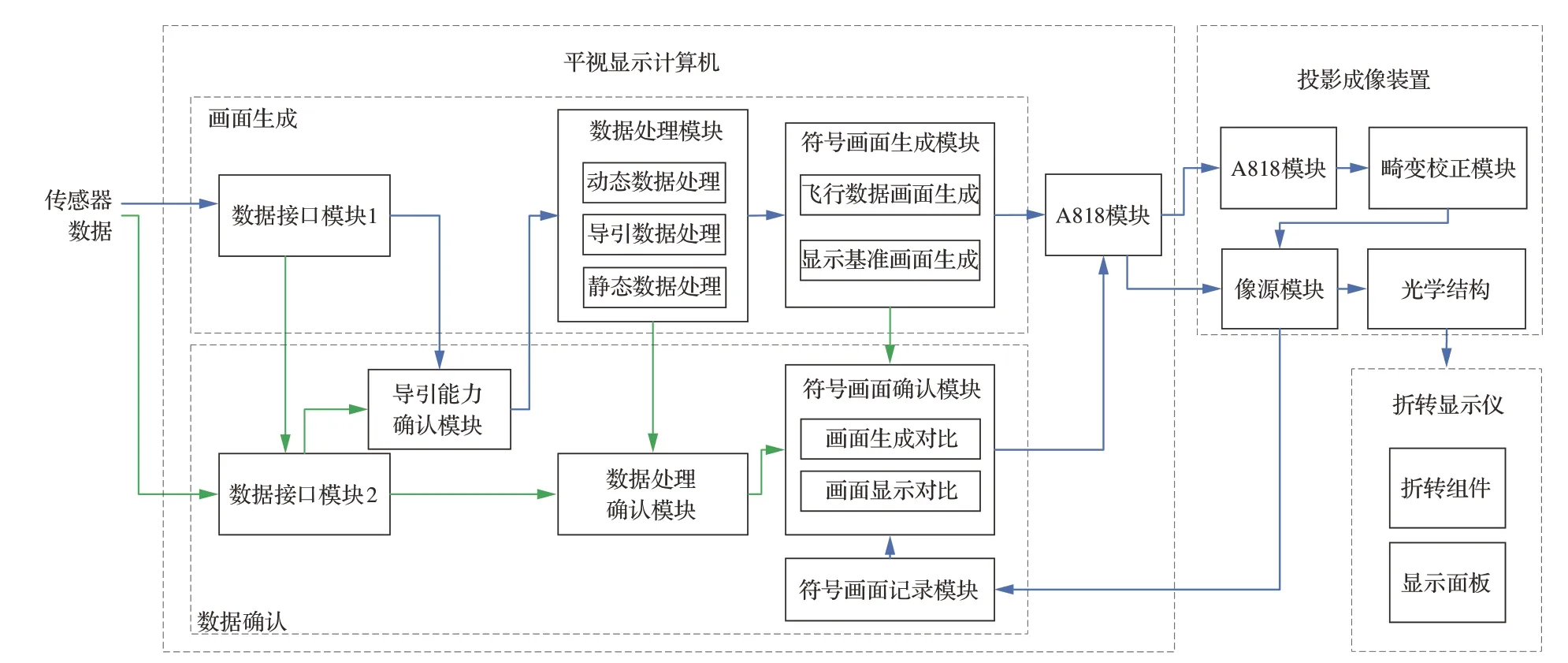
圖7 進近階段HUD 系統結構Fig. 7 HUD system structure in approach stage
為便于后續分析計算,對上述2 階段中HUD系統模塊、組件及子系統進行編號,如表6 所示。HUD 系統的巡航、進近任務中,元件X13、X14 失效數據模糊,此外還存在CC1、CC22 個共因事件。其他與任務相關的元件/模塊的失效率(每飛行小時)如表7 所示。
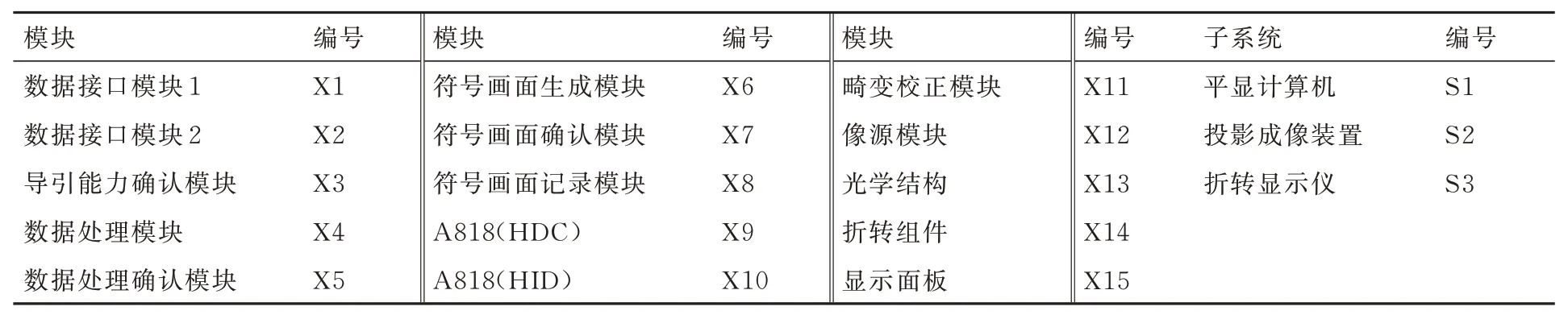
表6 HUD 系統任務組件編號Table 6 HUD system task components ID

表7 任務相關元件/模塊失效率Table 7 Failure rate of mission-related components/modules
3.2 基于直覺模糊貝葉斯網絡的HUD 系統可靠性分析模型構建
3.2.1 HUD 系統多階段任務貝葉斯網絡模型
構建HUD 兩階段任務的貝葉斯網絡模型,如圖8 所示。圖中A、B 分別表示巡航階段與進近階段,TA、TB 分別為兩階段節點,S 為系統整體任務節點。

圖8 HUD 系統巡航-進近階段貝葉斯網絡Fig. 8 Bayesian network in cruise and approach stages of HUD system
3.2.2 考慮共因失效的HUD 系統任務模型
HUD 系統在巡航任務中,元件X13、X15 可能受到共因事件CC1影響,在進近任務中元件X14、X15 可能受到共因事件CC2影響而失效,兩共因事件相互獨立,且受影響元件皆為確定型共因失效。依據2.1.3 節引入共因空間節點CCE 對網絡模型進行擴展,如圖9 所示。
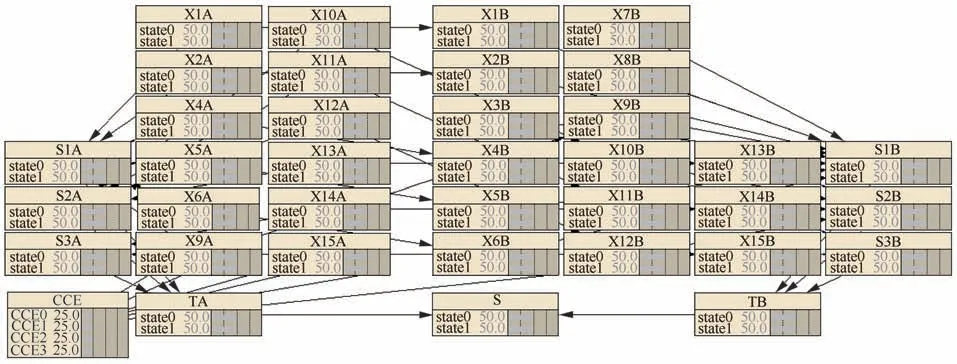
圖9 考慮共因失效的HUD 系統巡航-進近階段貝葉斯網絡Fig. 9 Bayesian network in cruise and approach stages of HUD system considering common-cause failures
3.3 定量分析
3.3.1 行業專家評審與權重計算
HUD 系統在巡航、進近任務過程中,元件X13、X14 的失效概率模糊,共因事件CC1、CC2發生概率模糊。3 位行業專家對4 個進行評估,評估人員3 項指標量化情況及權重如表8所示。依據表4 中分級編號進行評估,結果如表9所示。
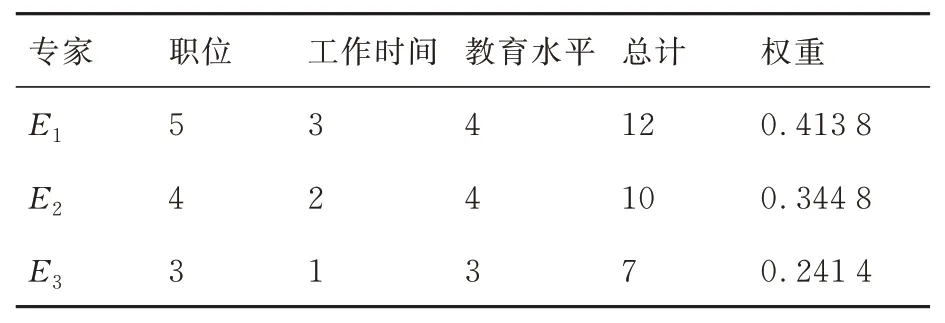
表8 評估人員量化指標Table 8 Evaluators quantification indicators
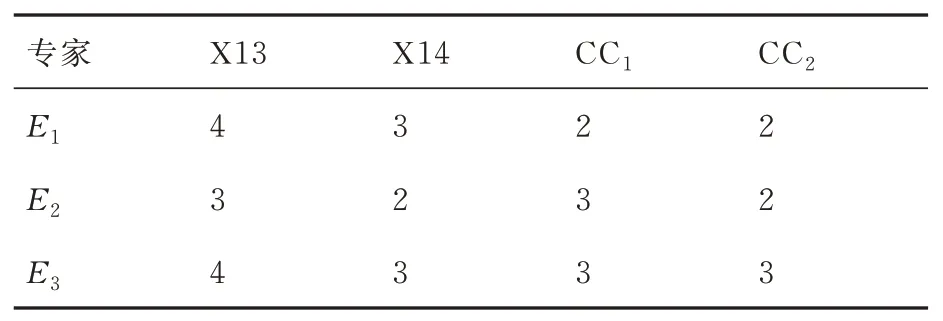
表9 評價結果Table 9 Fuzzy event evaluation results
3.3.2 意見聚合及解模糊
依據基于Tω 的意見聚合算法及IFFP 與失效 率轉換 算法對X13、X14、CC1、CC2等模糊 事件的初步評估結果進行聚合與解模糊處理。以元件X13 為例進行聚合與解模糊計算,如表10和表11 所示,所有模糊事件的計算結果如表12所示。
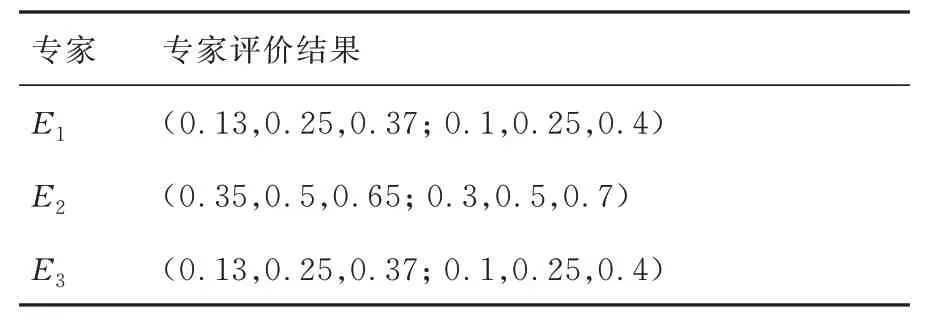
表10 元件X13 專家評價結果Table 10 Expert evaluation results of component X13

表12 HUD 系統模糊事件的聚合及解模糊計算結果Table 12 IFFR and FR calculation results of HUD system
3.3.3 HUD 系統任務可靠度計算
1)共因失效相關節點參數計算
① 共因空間節點參數。對2 個共因事件組成的共因空間進行劃分,形成4 個不相交的共因子空間,并計算其相應概率,形成共因空間節點概率表見表13。
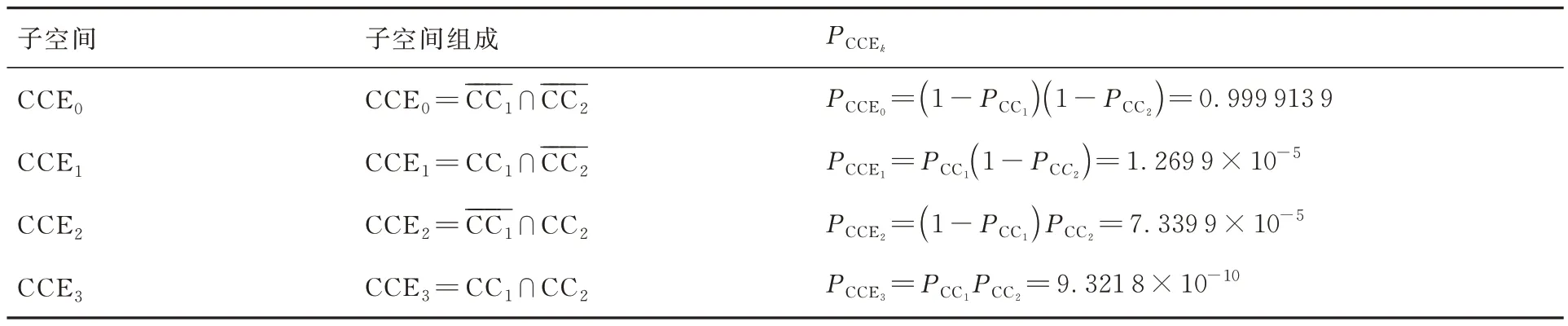
表13 CCE 節點概率表Table 13 Probability table of CCE
② 元件節點參數。對可能收到共因事件影響的元件節點,即X13、X14、X15 進行參數修正。元件X13 在TA 階段可能受CC1,即共因子空間CCE1、CCE3影 響,元 件X14 在TB 階 段 可 能 受CC2,即共因子空間CCE2、CCE3影響。元件X15在TA 階段可能受CC1影響,在TB 階段可能受CC2影響,即可能受CCE1、CCE2、CCE3影響。以元件X14 為例進行參數計算,TA和TB分別為TA、TB 階段的持續時間。
依據式(11),在階段TA 中,對于元件X13,j=1,m=1,則:
對于元件X15,j=1,m=1,則:
在階段TB中,對于元件X14,j=2,m=1,則:
對于元件X15,j=2,m=1,則:
2)HUD 系統巡航-進近任務可靠度計算與分析
依據表7 和表11 中失效數據及考慮共因失效的節點參數計算結果,計算HUD 系統的巡航-進近階段任務可靠度(考慮或不考慮共因失效),結果如圖10 所示。

圖10 考慮與不考慮共因失效的HUD 系統巡航-進近階段任務可靠度對比Fig. 10 Comparison of mission reliability of HUD system in cruise and approach stages with and without common-cause failure

表11 元件X13 的聚合及解模糊計算Table 11 Polymerization of element X13 and its de-fuzzification calculation
當不考慮共因失效時,HUD 系統巡航-進近任務進行至1.6 飛行小時,系統任務可靠度為0.999 935 1。考慮共因失效時,任務進行至1.6飛行小時,系統任務可靠度為0.999 865 8。
在模糊評價聚合階段,如不采用基于Tω 算子的模糊數聚合,上述4 個模糊事件的聚合及解模糊計算結果如表14、表15 所示。

表14 不采用Tω 算子的模糊事件聚合結果Table 14 Fuzzy event aggregation results without Tω
依據表15 中解模糊結果,考慮共因失效影響,計算HUD 系統巡航-進近階段任務可靠度,當任務進行至1.6 飛行小時,系統任務可靠度為0.955 526 8。采用與不采用Tω 算子進行模糊數聚合的系統任務可靠度對比如圖11 所示。其中采用Tω 算子進行模糊數聚合所得的任務可靠度參照左側坐標軸,不采用Tω 算子所得的可靠度參照右側坐標軸。可靠度差值趨勢如圖12 所示,當任務進行至1.6 飛行小時,不采用Tω 算子將使得可靠度降低0.044 34,誤差達到約4.4%,由此可見Tω 算子能夠一定程度上減輕模糊累積問題帶來的計算偏差。
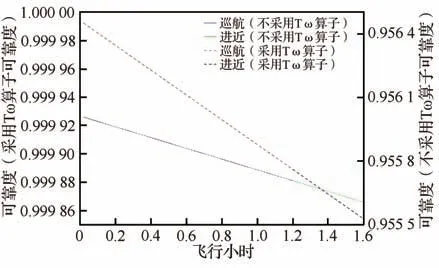
圖11 采用與不采用Tω 算子進行模糊數聚合的系統任務可靠度對比Fig. 11 Comparison of task reliability of fuzzy number aggregation system with and without Tω operator
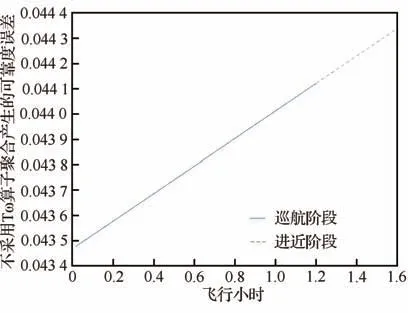
圖12 采用與不采用Tω 算子進行模糊數聚合的系統任務可靠度差值Fig. 12 Task reliability difference of fuzzy number aggregation system with and without Tω operator
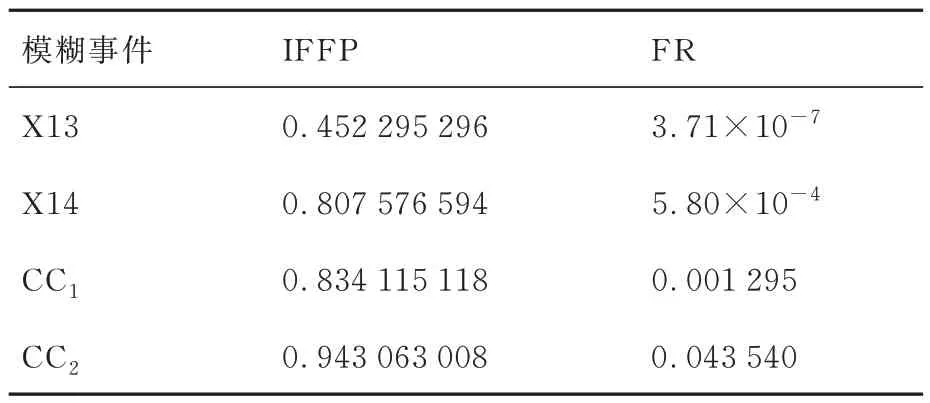
表15 不采用Tω 算子的模糊事件解模糊結果Table 15 Fuzzy results of solution without Tω
4 結 論
提出基于直覺模糊貝葉斯網絡的HUD 多階段任務可靠性分析方法,能夠在底層可靠性數據缺失的情況下進行可靠性分析,并綜合考慮了可能出現的共因失效問題。①構建待分析系統任務的貝葉斯網絡模型,對于多階段任務構建PMS-BN 模型,并綜合考慮可能的共因失效影響,對PMS-BN 模型進行擴展構建PCCF-PMS模型;②對模型中模糊事件進行定性語言評價并轉化為對應模糊數,經過基于Tω 的意見聚合及適當的IFFP 與失效率轉化,得到最終聚合結果;③綜合模糊聚合結果及其他確定數據,依據PCCF-PMS 模型進行可靠性計算。
基于直覺模糊貝葉斯網絡的多階段任務可靠性分析方法是直覺模糊理論與貝葉斯網絡可靠性分析的綜合,應用直覺模糊理論對貝葉斯網絡中的模糊事件進行評估。提出了適用于航電設備的模糊數定義及IFFP 與失效率轉化方法,避免轉換算法與航電設備失效概率空間不匹配帶來的轉換偏差。將基于Tω 的意見聚合應用于貝葉斯網絡可靠性分析,降低多重模糊累積帶來的聚合誤差。
所提方法為缺乏設備服役經驗、底層失效數據模糊情況下的可靠性分析提供可行思路,提出適用于航電設備的IFFP 與失效率轉換方法。但目前對于該環節轉換方法的研究并未深化至模塊/組件級別,對電子模塊、包含機械結構的模塊、光學結構組件等不同模塊采用同樣的轉化方法依然可能帶來一定誤差。因此,對模塊/組件的具體類別及失效特點進一步分析,提出更細化的轉換方法以提升模糊分析的準確性將是后續研究的關注重點。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
