煤炭智能運輸車PLC控制系統的設計
2023-03-29 09:38:44王程陳亞東
時代汽車 2023年7期
王程 陳亞東
1.遼寧鐵法能源有限責任公司 遼寧省鐵嶺市 112799 2.鐵法煤業(集團)有限責任公司 遼寧省鐵嶺市 112700
隨著人工智能技術的快速發展,物流運輸行業也越來與智能化和自動化,在煤炭運輸領域,煤炭智能運輸車是現代煤炭技術發展的核心之一。各煤炭企業都需要成熟可靠的煤炭智能運輸車。本文提出了一種通用的煤炭智能運輸車系統方案。煤炭智能運輸車的以可編程邏輯控制器為核心,通過模擬量輸入模塊采集數據給PLC,完成對所需模擬信號的采集,控制煤炭運輸車行走的作業,系統由三元鋰電池供電,具有綠色,節能,方便,穩定等特點。
1 智能運輸車的控制系統方案
煤炭智能運輸車系統結構框圖如圖1 所示。主要包括可編程邏輯控制器(PLC),數據采集傳感器,控制對象以及人機界面HMI 等組成。其中模數數模轉換模塊采集輸入的模擬信號并轉換成和運行電機的速度控制模塊的輸出。位置編碼器用于實用反饋當前轉向角度數據,其數據與電池狀態數據通過RS-485 通信方式與PLC 交換數據。

圖1 系統框圖
2 煤炭智能運輸車的軟件系統設計
2.1 控制程序的模塊化設計
煤炭運輸車的軟件程序按功能劃分為:通信、模擬量初始化、轉換程序、制動程序、前進程序、變向程序、緊急故障報警程序等。通過分功能編寫模塊化設計,并進行分步調試,所有分步功能實現以后,進行專題聯調聯試。
2.2 I/O 端口分配
I/O 端口分配如圖2 所示:

圖2 I/O端口分配分配
2.3 可編程控制程序
①通信程序
圖3 為讀取編碼器數據梯形圖。S0 為讀取角度數狀態。D3O7 存放發送的指令數據00 03 00 04 00 01 84 4A。SEND為發送指令。圖4 為電池狀態數據讀取梯形圖。

圖3 讀取編碼器數據梯形圖
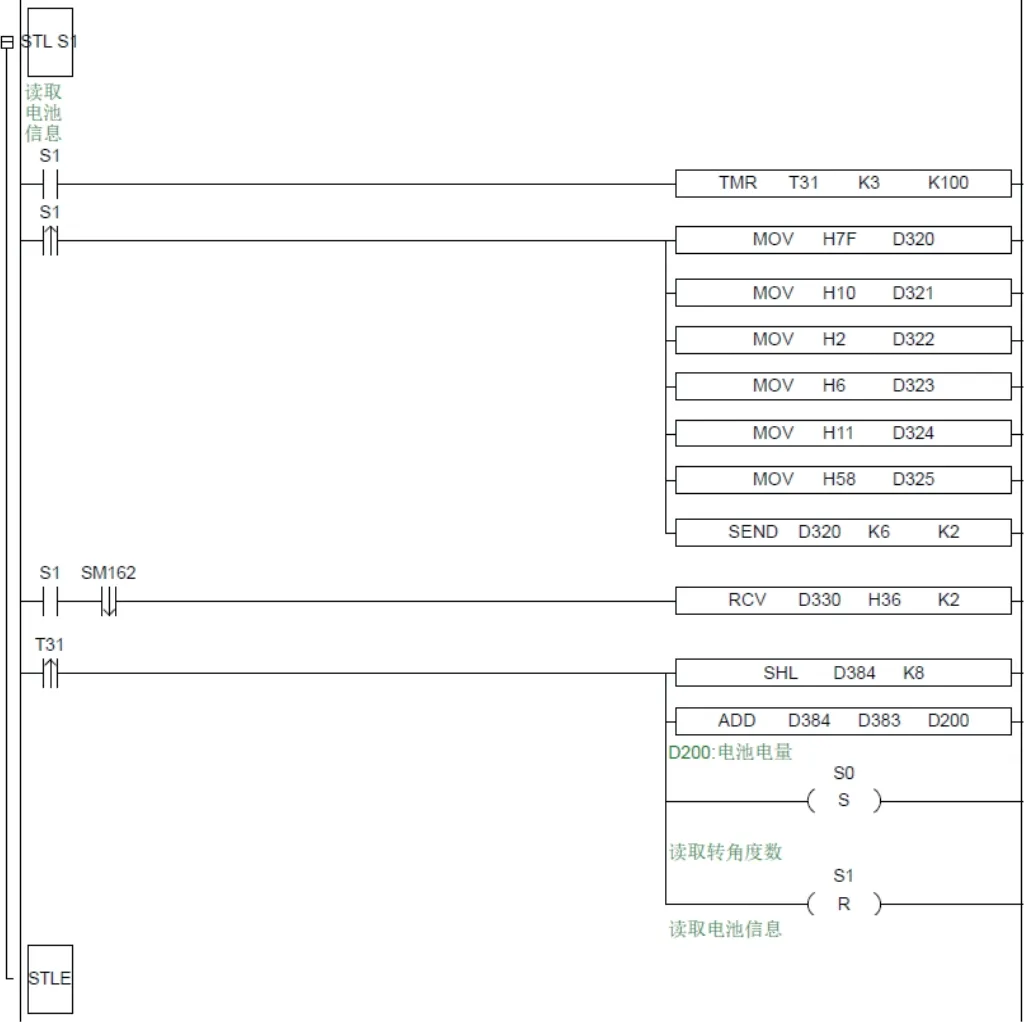
圖4 讀取電池狀態數據梯形圖
②模擬量復位程序及運算控制程序
模擬量復位程序及運算控制程序如圖5 所示。模擬量AD 輸入通道1 接制動油路變送器,模擬量AD 輸入通道2 接角度傳感器,相應數據存放于D30。

圖5 模擬量復位程序及運算控制程序
③電機運行程序
電機運行程序分為向前和向后兩部分程序。Y3 控制電機方向,用來判讀向前還是向后,Y2 控制電機行走。圖6 所示為向前的PLC 程序。圖7 為智能煤炭車后退動作的控制程序。

圖6 前進控制程序

圖7 后退控制程序
3 煤炭智能運輸車軟件調試
當煤炭智能運輸車的硬件調試完成后,進行軟件分步調試。分步調試全部完成后,進行系統聯調聯試。根據初定的控制要求檢查是否實現功能,根據現象進行程序修改,直到控制要求正常。
4 結語
煤炭智能運輸車控制系統通過安裝調試,實現控制功能。可負載1.8 噸的情況下,完成向前、向后、左轉、右轉、制動等工作環節,保證系統工作正常。
猜你喜歡
人大建設(2019年12期)2019-05-21 02:55:44
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年12期)2018-08-01 00:47:44
制造技術與機床(2017年6期)2018-01-19 02:41:21
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
電子制作(2017年19期)2017-02-02 07:08:38
