基于常規助力與主動轉向的車輛橫向控制研究
2023-05-09 09:46:24王貴林韓同群徐忠國
汽車實用技術 2023年8期
王貴林,韓同群,徐忠國
(湖北汽車工業學院 汽車工程學院,湖北 十堰 442002)
新能源汽車的車載能源為動力電池,其儲存的電能除驅動汽車行駛外,還要給其他系統供能,如:空調、電控懸架、轉向系統等,要求這些系統耗電量低才不過多降低汽車的續駛里程,電動助力轉向(Electric Power Steering, EPS)系統根據車速和方向盤轉矩按需輸出轉矩,具有安全性高、輕量化和節能的優點。此外新能源汽車的結構參數與傳統汽油車不同,比較典型的是轉向輪軸荷的變化。因此,新能源汽車可繼承傳統汽油乘用車的EPS 系統,但要針對具體車輛進行開發和適配。自動駕駛技術的發展和高級駕駛輔助系統的應用,使得EPS 作為主要的執行機構可以更好地與整車控制器進行實時交互。車道保持輔助系統(Lane Keeping Assist, LKA)作為典型的橫向先進駕駛員輔助系統功能之一,多以EPS 作為其執行機構[1]。
文獻[2]考慮跨道時間與駕駛員轉向的協調性,系統存在LKA 前輪轉角控制模式和EPS 常規助力模式的切換。文獻[3]建立了聯合預警算法,利用駕駛員動作的辨識模型實現模式轉換。系統在模式切換時導致LKA 開啟時助力消失,存在安全隱患。文獻[2]、文獻[3]將LKA 的介入與退出依賴于跨道時間和駕駛員上,對車道線檢測考慮較少。文獻[4]在EPS 助力力矩上疊加轉角控制力矩,但忽略控制權限的轉移。文獻[5]對LKA 退出策略進行了設計,并利用主、客觀評價方法優化了策略參數,提高了LKA 系統的接受度,但并未考慮如何基于EPS 系統實現。
線性二次調節器(Linear Quadratic Regulator,LQR)可以讓控制系統的動態范圍由初始狀態轉換至控制目標狀態的同時也可以讓受控目標值達到最優,可兼顧系統的多個目標,實現最優控制。本文制定常規助力與基于最優控制理論的主動轉向的控制策略,實現新能源汽車自動駕駛系統中LKA 的功能。
1 基于EPS 的LKA 結構
車輛橫向控制主要有兩類,一是主動變道,駕駛員根據行駛需要提前打轉向燈再進行變道;二是非主動變道,是駕駛員無操作意識的狀態下車輛偏離原車道的情況。針對非主動變道的就是LKA 系統。因此,EPS 系統需要扮演兩種角色,一種是非駕駛輔助模式下的助力轉向,另一種是駕駛輔助模式下的主動轉向,如圖1 所示。
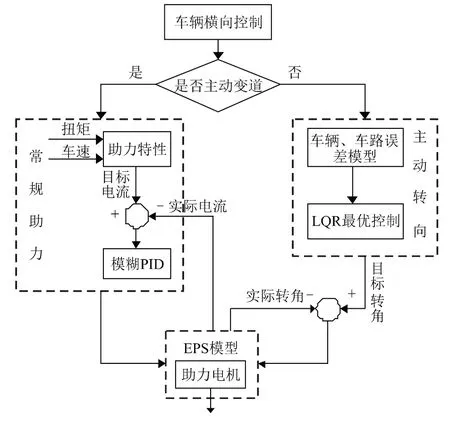
圖1 EPS 的常規助力模式與主動轉向控制
2 EPS 模型及控制策略設計
2.1 EPS 數學模型
EPS 主要由轉向柱、扭矩傳感器、助力電機和齒輪齒條構成,建立其數學模型。
轉向柱:
扭矩傳感器:
助力電機模型:
齒輪齒條機構:
常采用脈沖寬度調制(Pulse Width Modulation,PWM)的方式驅動直流電機,利用傳遞函數近似表示為
式中,Td為方向盤轉矩;Ts為扭矩傳感器測量值;θc為方向盤轉角;θp為小齒輪轉角;xp為齒條位移;θm為電機轉角;Up為脈寬調制控制電壓;KPWM為脈寬調制放大系數;T為脈寬調制開關周期。
某品牌電動乘用車EPS 系統各模塊參數如表1 所示。

表1 某品牌電動乘用車EPS 系統參數
2.2 EPS 控制策略設計
EPS 系統的控制策略可以分為上層的助力控制和下層的電機控制。
2.2.1 直線型助力特性曲線的設計
通過與曲線型、折線型比較,直線型助力特性曲線是最簡單的,便于設計與調整[6]。式(6)為直線型助力特性曲線函數表達式。
式中,Tmax為電機助力轉矩最大值;K(v)為車速感應系數;Td0為電機開始提供助力時方向盤轉矩;Tdmax為助力轉矩達到最大值時方向盤轉矩。
由式(6)可知,表達式需要確定的參數主要有K(v)、Td0、Tdmax和Tmax。
方向盤輸入轉矩Td0的確定,一般情況下Td0的取值在[1,2]的范圍內,本文選取Td0=1.8 N·m。
方向盤最大輸入轉矩Tdmax的確定,可以通過式(7)計算Tdmax:
式中,D為方向盤直徑;Fmax為方向盤上的最大切向力。
最大助力轉矩Tmax的確定:
當車輛在原地轉向時,電機輸出轉矩最大。一般采用半經驗公式,計算車輛的原地轉向阻力矩[7]。
式中,Mrmax為原地轉向最大阻力矩;f為輪胎與路面之間的摩擦系數,取值0.7;p為輪胎氣壓;m為汽車質量;b為質心到后軸的距離;a為質心到前軸的距離;L為軸距。
當電機提供的助力為0 時,駕駛員在方向盤上的最大轉矩Tmax可以由以下的公式計算得到
式中,i為轉向機構的傳動比;η*為轉向效率。
助力電機能夠提供的最大助力轉矩Tmax,可由以下公式計算得到
車感系數K(v)的確定:
汽車在原地轉向時,對應的車速感應系數值最大,車速感應系數的最大值可以由以下公式計算:
計算得到車速感應系數的最大值為1.68。根據直線型助力特性曲線可知,車感系數與車速呈負相關。設計的車感系數為衰減速度較快的負指數函數:
通過前文公式所計算的車速感應系數的最大值,選取車速為100 km/h 時,所對應的車速感應系數,將其帶入公式中,可以得到車速感應系數的函數表達式:
將參數代入直線型助力特性曲線的函數表達式中,計算得出電機目標電流與行駛車速和方向盤轉矩的關系曲線,如圖2 所示。
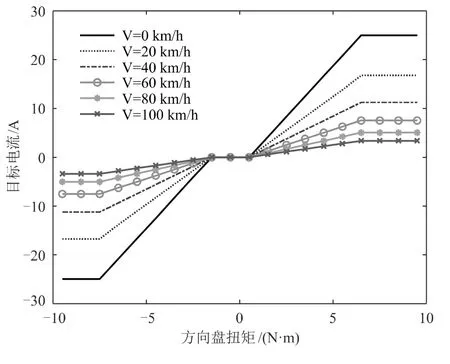
圖2 直線型助力特性曲線
2.2.2 模糊自適應PID 控制
傳統比例-積分-微分(Proportion Integral Differentia, PID)控制策略由于自身參數是固定不變的,因此,本文采用模糊自適應PID 控制策略的優點來實現我們的控制目標。由助力特性曲線利用插值法得出目標電流,目標電流和電機反饋電流的差值和差值變化率作為系統的輸入,輸出控制量ΔKp、ΔKi和ΔKd,最后經過PID 控制器得到電壓。根據PID 參數的調整規則和EPS 的特點,可以設計輸入輸出論域和相應的模糊規則。搭建的模糊PID 控制策略結構如圖3 所示。
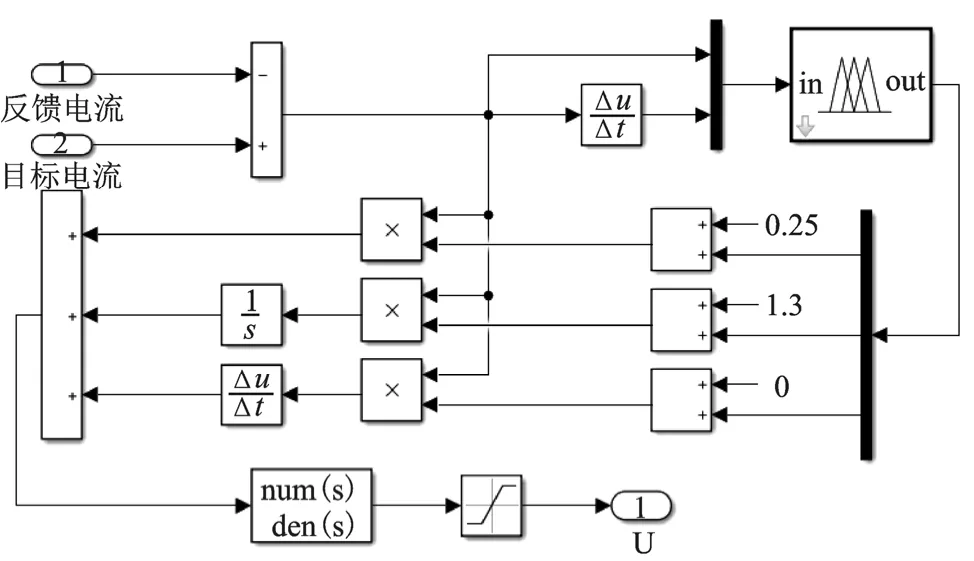
圖3 模糊PID 控制策略結構圖
3 LKA 主動轉向控制
3.1 車輛、車路誤差模型
由于車道保持輔助系統主要考慮的是車輛的側向運動,所以本文對七自由度整車模型進行一定的簡化,采用只有側向及橫擺運動二自由度汽車的側向動力學模型,如圖4 所示。
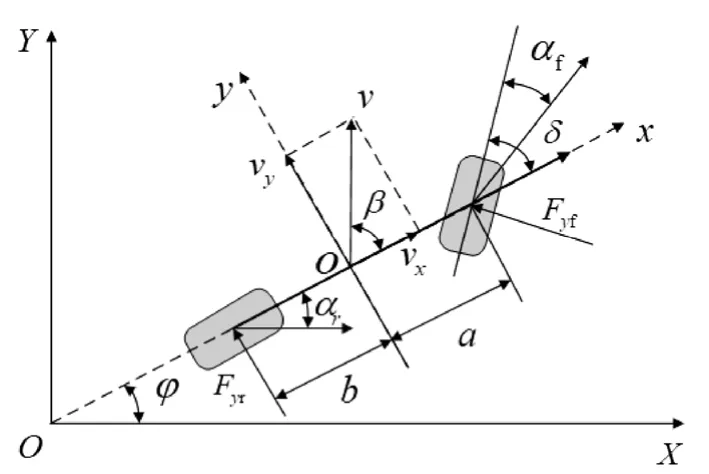
圖4 線性二自由度汽車模型
圖中,Fyf和Fyr為側偏力;αf和αr為前后輪側偏角;δ為前輪轉角;vx、vy車輛縱、橫向速度;β為質心側偏角。
對二自由度汽車模型進行受力分析有
因前輪轉角δ較小,cosδ≈1,則式(14)可變為
式中,Cαf、Cαr為前后軸側偏剛度。
前、后輪側偏角可由式(16)求得
整理得,關于橫向速度和橫擺角速度的線性二自由度汽車動力學模型矩陣方程為
式中,Iz為車輛轉動慣量。
為了描述車輛與道路之間的位置關系,建立了路徑跟蹤模型,包括橫向位置偏差yb和橫擺角誤差φb。
根據線性二自由度車輛模型及路徑跟蹤模型,可計算得出車輛相對于道路的橫向位置偏差和橫擺角誤差。
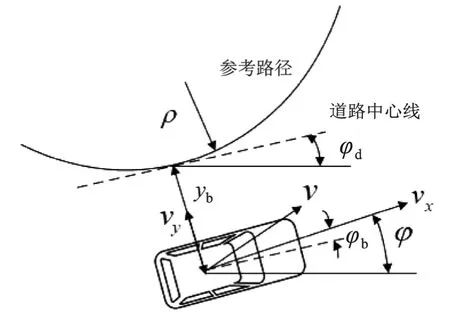
圖5 路徑跟蹤模型
綜合式(17)和(18),取系統的狀態變量X=[vyωrybφb]T,輸入量u=[δ],擾動量為道路的曲率γ=ρ=1/R,則車路模型的狀態空間方程為
式中
3.2 最優控制器設計
LKA 系統控制器通過車輛狀態信息和道路信息判斷車輛與道路之間的相對位置關系,計算出車輛與道路中心線的橫向位置偏差和橫擺角誤差,利用LQR 控制算法計算出當前車輛所需的目標轉角,并與EPS 系統的真實轉角進行交互,以此來修正車輛前輪轉角,保證汽車在車道中心線行駛。
定義最優控制性能指數:
式中,w1、w2、w3、w4和w5為權重系數,可根據控制目標適當調節。vd、ωrdyd和φd為期望值。當vd、yd和φd都為零時,車輛的穩定性和跟蹤效果較好。ωrd=vx/R為期望橫擺角速度,由道路模型決定。式(20)可改寫成二次型函數:
式中,Q為四階對角矩陣;R=[r]。
根據車路模型的狀態方程和最優控制性能指標構造哈密爾頓函數,以求解最優控制量。
式中,P為拉格朗日乘子矢量。對式(22)中的u求解一階偏導數,尋找u使得H最小。即
由最優控制理論知,P與X呈線性關系,
式中,K、X為系數矩陣,通過建立黎卡提方程求解。
最終求得目標轉角
將目標轉角與EPS 的實際轉角交互得到車輛所需的前輪轉角。
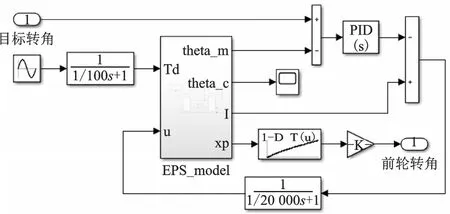
圖6 目標轉角與實際轉角的交互
4 仿真結果分析
4.1 常規助力仿真模型
當車輛處在常規助力模式下,設置車輛幾何參數、輪胎參數等,其它設置成系統默認參數。在CarSim 軟件中設置前輪轉角為輸入,輸出車速和左右輪回正力矩,搭建仿真模型。輸入正弦轉向盤操縱力矩其幅值為7 N·m,記錄助力開啟和關閉時的仿真結果如圖7 所示。

圖7 開啟助力與關閉助力仿真效果
從圖7 中可以看出,方向盤轉角的值在-85~77 deg 之間變化,當方向盤轉角轉到最大處77 deg、最小處-85 deg 時,車輛轉向系統在有助力控制的狀態下,對應的方向盤轉矩值最大值為5 N·m,最小值為-5 N·m;而在無助力控制的狀態下,對應的方向盤轉矩值最大值為14 N·m,最小值為-14 N·m。顯然在有助力控制時,方向盤轉矩值小于無助力控制情況下的扭矩值,幅值小且變化平緩,有利于操控,可以減輕駕駛員的駕駛疲勞感;且在相同方向盤轉角的輸入下,無助力控制情況下的扭矩值也總比有助力控制情況下的扭矩值大,說明所設計的EPS 控制策略具有較高的準確性,可以提升車輛的轉向輕便性。
4.2 主動轉向控制仿真模型
主動轉向控制設置為在沒有駕駛員參與時,LKA 系統根據車路誤差模型利用LQR 控制算法得到目標轉角,與EPS 系統交互控制從而帶動轉向機構主動轉向,使車輛保持在車道中心線行駛。在CarSim 中設置車輛縱向、側向速度,橫擺角速度以及期望的路徑坐標為輸入,前輪轉角為輸出。
目前LKA 系統主要應用于結構化的道路上,如高速公路和路面條件較好的公路,啟動時的車速絕大多數在60 km/h 及以上,本文設置車速為70 km/h 進行仿真驗證。從圖8(a)中可以看出,設計得基于LQR 的主動轉向的控制策略,能夠很好地修正前輪轉角,使車輛的運動軌跡跟隨參考軌跡,跟蹤精度高誤差較小;從圖8(b)—圖8(d)中可以看出,在直線道路橫向位置偏差、橫擺角偏差和轉向盤轉角均無變化都為零值,有著良好的車道保持效果;隨著道路曲率的變化,偏差和轉角的值也隨之變化以適應道路軌跡的改變,但波動的幅值較小且平緩,在12 s 后恒穩定為零,且橫向位置偏差和橫擺角偏差會隨著實時調整的前輪轉角而改變且盡可能地小,從而確保車輛在車道中心線上行駛,提高車輛的橫向穩定性,保證行車安全。
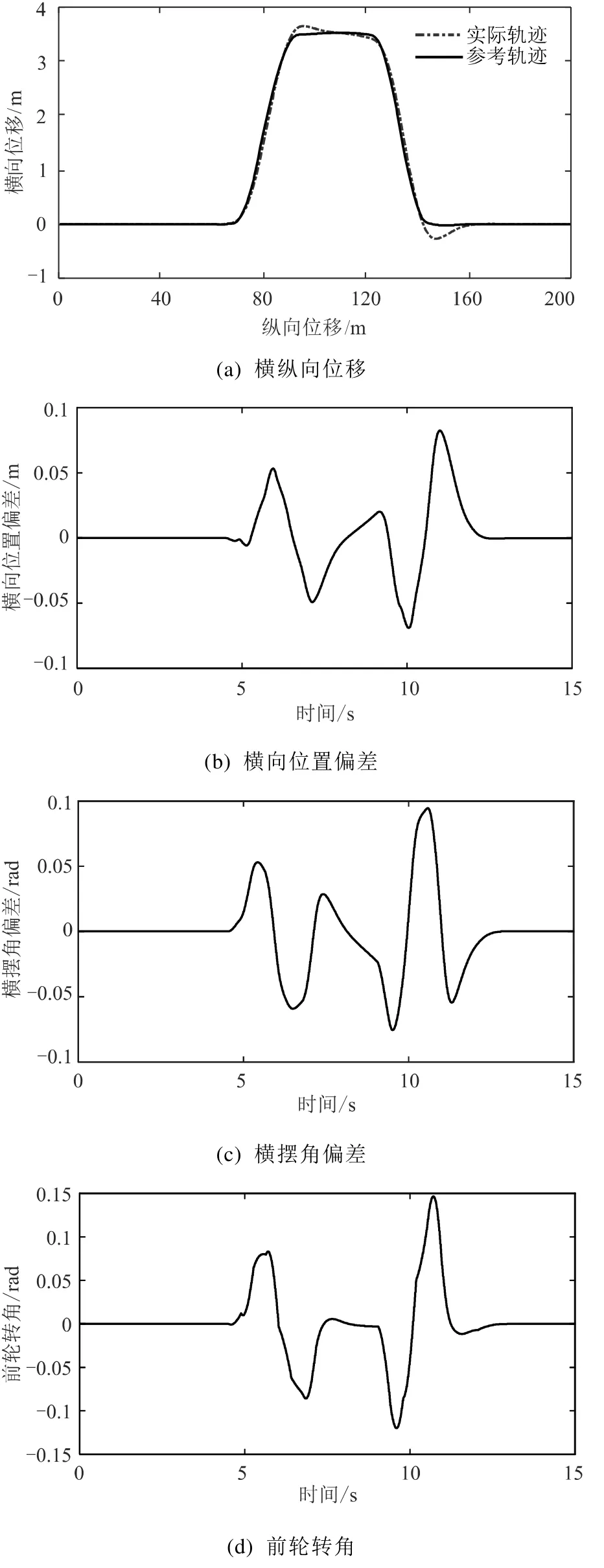
圖8 70 km/h 的仿真變化曲線
5 結論
本文根據EPS 在車輛行駛時所扮演的兩種不同角色,分析了新能源汽車自動駕駛系統中的常規助力模式和車道保持輔助系統的主動轉向功能。通過CarSim 軟件構建整車模型,并與MATLAB/Simulink 所搭建的EPS 系統仿真模型實現數據交互,驗證模型的正確性。仿真結果表明,提出的常規助力控制系統模型能夠很好地控制助力電機的輸出扭矩,實現助力的目的提高車輛的轉向輕便性。基于LQR 最優控制算法在能夠精確地實現新能源汽車車道保持輔助的功能,可極大提高車輛的橫向穩定性和安全性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
商周刊(2017年17期)2017-09-08 13:08:58