車載定位系統的應用及關鍵技術
2023-05-09 09:46:46蔡之駿李曉平
汽車實用技術 2023年8期
關鍵詞:系統
蔡之駿,張 曄,李曉平
(廣東省智能網聯汽車創新中心有限公司,廣州 廣東 511434)
隨著通信技術及人工智能技術的發展,車聯網及先進駕駛輔助系統(Advanced Driver Assistance System, ADAS)相關技術已逐漸普及,車用無線通信技術(Vehicle to Everything, V2X)等應用已在部分車輛上實現試運行或量產搭載,通過車聯網實現車路人互聯,可有效提高行車安全,優化交通狀況[1-2]。然而,目前幾乎所有的ADAS及自動駕駛場景均依賴于本車及遠車的定位信息,車輛的定位精度會直接影響ADAS 及自動駕駛相關應用的準確度,定位偏差較大時,相關系統會發生誤判,嚴重影響其功能的可靠性與準確性,在某些極端場景下甚至可能引起車禍。因此,作為整車定位信息的主要來源甚至是唯一來源,車載定位系統的作用與重要性也與日俱增[3]。
傳統的車載定位系統一般使用單純的衛星定位獲取車輛定位信息,其成本低廉且易于實現,但其定位精度和穩定無法滿足V2X 等ADAS 相關場景的應用(V2X 場景一般要求米級定位,若要與自動駕駛場景融合則需要分米級甚至厘米級定位)。因此,傳統的車載定位系統在原有的衛星定位上逐步升級,加入差分定位、慣性導航及組合導航系統,以實現車載高精定位,滿足ADAS 及自動駕駛的定位需求。
本文首先介紹了傳統衛星定位的基本原理,然后分析在此基礎上的主流車載高精定位方案及其原理。
1 衛星定位原理
傳統的衛星定位也被稱為全球導航衛星系統(Global Navigation Satellite System, GNSS)定位,其在車聯網及自動駕駛相關需求出現之前是車載定位系統的主流配置。
在車載定位系統中,衛星定位的原理為車載定位終端直接接收包含原始觀測量的衛星信號,然后根據收到的衛星信號,通過載波相位、碼元等信息,解算出內部的距離信息。考慮到時鐘誤差的存在,理論上至少要同時能觀測4 個衛星,才能計算出車載終端的位置信息,其方程組為[4]
式中,(xi,yi,zi)為每顆衛星各自的空間坐標,視為已知量;(x,y,z)為待求的整車定位結果;δtu為車載終端的時鐘誤差;ρi(i=1,2,3,4...)為車載終端接收到的來自可見衛星的偽距觀測量,偽距定義為信號接收時間與信號發射時間之差乘以真空中的光速。解算上述方程組即可求出車載定位結果及時鐘誤差,從而實現整車定位與時間同步[5]。
由于觀測誤差與噪聲的存在,定位終端一次接收到的衛星數量越多,理論上的定位效果也越好,每顆定位衛星都有隸屬的衛星導航系統。當前GNSS 主要由以下四個衛星導航系統組成:全球定位系統(Global Positioning System,GPS)、格洛納斯、伽利略與北斗,具體內容如下所述:
1)GPS 是在美國海軍導航衛星系統的基礎上發展起來的無線電導航定位系統,具有全能性、全球性、全天候、連續性和實時性的導航、定位和定時功能,現今共有在軌工作衛星31 顆,其中GPS-2A 衛星10 顆,GPS-2R 衛星12 顆,經現代化改進的帶M 碼信號的GPS-2R-M 和GPS-2F 衛星共9 顆。
2)格洛納斯即全球衛星導航系統(Global Navigation Satellite System, GLONASS),是由原蘇聯國防部獨立研制和控制的第二代軍用衛星導航系統,該系統是繼GPS 后的第二個全球衛星導航系統。GLONASS 系統由衛星、地面測控站和用戶設備三部分組成,系統由21 顆工作星和3 顆備份星組成,分布于3 個軌道平面上,每個軌道面有8顆衛星,軌道高度為19 000 km,運行周期為675 min。
3)伽利略衛星導航系統(Galileo Satellite Navigation System, GSNS),是由歐盟研制和建立的全球衛星導航定位系統,該計劃于1992 年2 月由歐洲委員會公布,并和歐空局共同負責。系統由30 顆衛星組成,其中27 顆工作星,3 顆備份星,衛星軌道高度為23 616 km,位于3 個傾角為56°的軌道平面內。
4)北斗衛星導航系統(BeiDou Navigation Satellite System, BDS)是中國自主研發、獨立運行的全球衛星導航系統。我國正在實施北斗三號系統建設,已于2018 年底,完成19 顆衛星發射組網和基本系統建設,向全球提供服務;2020 年6 月已發射北斗三號最后一顆衛星,現已建成北斗全球系統,向全球提供服務;2035 年前還將建設完善更加泛在、更加融合、更加智能的綜合時空體系。
2 差分定位
傳統GNSS 定位實現簡單,成本低廉,但其定位精度受諸多因素影響,例如:衛星信號穿過地球對流層、電離層時會發生折射,傳播到建筑上會發生反射,這些都會導致信號傳播時間計算有誤,繼而帶來距離計算偏差,該誤差可達幾米甚至幾十米。
為了消除這些誤差,目前比較常用且有效的方法為采用差分定位,即在固定的位置建立若干固定的觀測站,觀測站也會同時觀測衛星的信號,然后通過觀測量建立誤差的數學模型,再將差分改正數播發給定位終端,用以修正GNSS 定位過程中由于對流層、電離層等干擾帶來的定位誤差。定位終端根據收到的衛星觀測量與差分改正數,通過算法即可獲得高精度的定位結果,其中最常用的為動態差分技術(Real Time Kinetic, RTK)算法,使用雙差模型,可使定位精度達到厘米級[6]。
RTK 算法基本原理如圖1 所示,基準站r 和移動站u(在車載定位系統中,移動站即為車載定位終端)對衛星i 的載波相位觀測值φr(i)與φu(i)可分別表示為
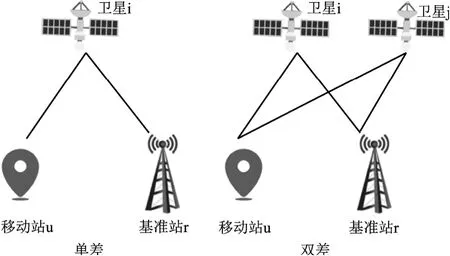
圖1 差分定位原理圖[6]
式中,λ為載波波長;和分別為基準站與移動站到衛星i 的幾何距離;和分別為基準站與移動站的電離層延遲;和分別為基準站與移動站的對流層延遲;f為載波頻率;和分別為基準站與移動站的接收機鐘差; δt(i)為衛星鐘差;和分別為基準站與移動站的整周模糊度;和分別為基準站與移動站的測量噪聲。
將上述兩式做差,可得
在短基線情況下,單差電離層與單差對流層延遲約等于0,故上式簡化為
即為衛星i 的單差載波相位測量值。
同理,假設基準站r 和移動站u 同時跟蹤觀測衛星i 和衛星j,則
將衛星i 和衛星j 的單差測量值做一次差分,可得雙差載波相位測量值為
其中,雙差整周模糊度是未知整數,其求解是利用RTK 實現精密相對定位的關鍵,快速準確地求出整周模糊度的固定解能有效提升定位精度。整周模糊度需要使用在航模糊度解算(On The Fly,OTF)在動態情況下快速求解,目前普遍使用OTF中的最小二乘模糊度降相關平差法(Leastsquare AMBiguity Decorrelation Adjustment, LAMBDA)算法動態求解整周模糊度,該算法理論嚴密,搜索速度快,可滿足相關需求[7-8]。
3 慣性導航系統
慣性導航系統(Inertia Navigation System,INS),簡稱慣導系統,主要包含導航計算機和慣性敏感元件。前者負責完成導航解算,后者包括陀螺儀和加速度計,其中陀螺儀輸出方位角及載體角速度等相關信息,計算姿態矩陣,通過該矩陣將加速度計輸出的載體加速度變換到導航坐標系,最后一起進行導航解算獲取載體的位置、姿態和速度等慣導數據,整體流程如圖2 所示。
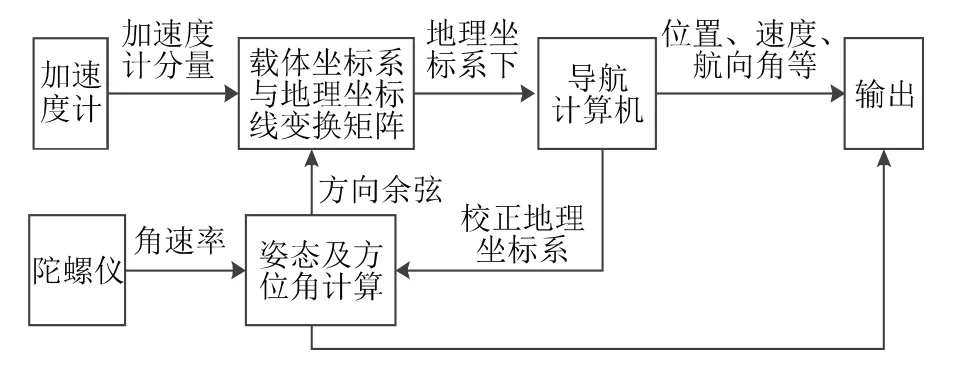
圖2 慣性導航原理圖[4]
與衛星定位及差分定位不同,慣性導航系統不需要衛星及網絡信號就能定位。在車載定位系統中,慣導系統只需要來自整車的輪速大小及方向信息即能實現定位,在隧道等幾乎沒有衛星信號的場景下,車載定位系統需要依賴慣性導航系統繼續保持整車定位輸出,與此同時,慣導系統的定位誤差會隨著時間的積累而增加,在開闊場景等衛星信號有保障的場景下其性價比不如GNSS+RTK,因此,車載定位系統一般不會只選取慣導系統作為定位源。注意慣導敏感元件所輸出的數據均基于載體坐標系,需要將其變換到求解導航參數較為方便的導航坐標系下,慣導系統常用的參考坐標系定義如下:
1.慣性坐標系
慣性坐標系(i 系)原點位于地球中心,在空間做勻速直線運動或處于靜止,不參與地球自轉,因此,也被稱為空固坐標系。
2.地球坐標系
地球坐標系(e 系)原點同樣位于地球中心,但其隨地球一起自轉,因此,也稱為地固坐標系;其z軸指向地球北極,x軸指向參考子午面與赤道的交點,y軸為東京90°方向,且與x軸都在赤道平面內。
3.地理坐標系
地理坐標系(t 系)原點位于載體所處坐標,z軸與當地地垂線重合,x軸和y軸位于當地水平面內且分別平行于當地經線切線方向和緯線切線方向。
4.載體坐標系
載體坐標系(b 系)固定在載體上,原點位于載體質心,x軸沿載體橫軸向右,y軸沿載體縱軸向前,z軸垂直于xy平面,構成右手坐標系(取法不唯一)。
5.導航坐標系
導航坐標系(n 系)也被稱為當地地理坐標系,是慣導系統選取的作為導航基準的坐標系,一般使用地理坐標系作為導航坐標系,也可選用載體坐標系之外的其他坐標系。
4 組合導航
高精定位(GNSS+RTK)與慣導系統都有各自的優缺點與適宜場景:前者能在開闊場景下提供穩定的高精度定位,但在遮蔽環境(隧道等)下無法正常工作;后者則相反,能在遮蔽環境下穩定輸出定位信息,但其誤差隨著時間累積導致無法保證長時間的定位精度。由于車輛實際的行駛環境錯綜復雜,不僅有隧道等完全遮擋場景,還存在著來自周邊高架橋、高樓等各種臨時遮擋,因此,目前越來越多的車廠開始在車載定位系統中使用組合導航方案,即使用高精定位與慣導系統進行組合,輸出融合定位結果作為整車定位,單純使用RTK 或慣導系統作為車載定位方案的廠家已經越來越少。根據高精定位數據與慣導數據耦合程度的不同,可劃分為松耦合方案、緊耦合方案與深耦合(超緊耦合)方案[9]。
4.1 松耦合原理
松耦合中,高精定位與慣導系統各自獨立工作,分別將各自的位置和速度等信息輸出給車載定位系統中的濾波器(一般為卡爾曼濾波)進行融合定位,計算得出融合后的最優解并給慣導系統進行補償反饋,如圖3 所示。松耦合是高精定位和慣導系統的低水平層次組合,實現簡單,但同時對衛星數的依賴較強,抗干擾能力與動態適應能力相對較差,即松耦合定位面對實際路況下的短遮擋場景,例如被測車輛旁邊有大車經過時,定位結果會受到較大影響,導致定位結果不夠穩定,具體測試情況參見4.4 節。

圖3 松耦合原理圖
4.2 緊耦合原理
與松耦合不同,緊耦合中慣導系統輸出的慣導數據與來自GNSS 模組的原始觀測量輸入首個濾波器,結合慣導定位數據與GNSS 數據各自的置信度進行卡爾曼濾波處理,使數據按置信度進行整體排序并計算相應方差,過濾置信度偏低的數據,如圖4 所示,同時,GNSS 原始數據與RTK后臺下發的差分改正數據進行RTK 計算,獲取經RTK 修正后的GNSS 數據,該GNSS 數據與首次濾波處理后的慣導數據及原始觀測量數據三者一起輸入給第二個卡爾曼濾波器進行二次濾波處理,同樣按置信度進行排序、過濾并計算方差,算出的定位數據進行最終的濾波處理(以上每次濾波后都會給慣導系統進行反饋補償),輸出高精定位與慣導融合后的定位結果,即實現緊耦合組合導航方案。

圖4 緊耦合原理圖
緊耦合方案相比松耦合有更高的定位精度,以及較強的抗干擾能力和動態適應能力,在帶有較多短遮擋場景的路況下也能保持穩定的高質量定位(具體測試情況參見4.4 節),因此,被當前需要ADAS 及智能駕駛相關應用的車載定位系統作為主流方案使用。注意緊耦合方案需要慣導算法與差分定位算法有較好配合,對雙方算法的要求都較高,因此,實現上比松耦合困難,成本也相對更高。
4.3 深耦合原理
深耦合則是在緊耦合的基礎上,將慣導系統的部分數據直接送到基帶芯片里 ,即慣性數據直接作為GNSS 解算的一部分,用來提高惡劣環境下載波相位、偽距等觀測量的精度和連續性,減少觀測量中斷和跳變,從而進一步提高組合導航精度和可靠性。深耦合的結構決定其需要直接在基帶模擬端進行融合 ,因此,實現深耦合方案,除了具備緊耦合算法能力外,還需要具備GNSS基帶芯片模擬端接收能力,即只有自研基帶芯片能力的公司才有做深耦合的能力 。因此,目前僅有少數公司掌握該技術,應用較少[10]。
4.4 松耦合與緊耦合測試對比
上文所述松耦合與緊耦合為目前使用最多的兩者組合導航方案,截取了部分量產實車路測數據以對比兩者的差異。所對比的松耦合及緊耦合方案均采用雙頻RTK+慣導(慣導參數規格相同),天線為同一型號的車載鯊魚鰭天線,測試路段相同。
測試結果對應的測試方法為量產實車搭載實際所用的車載定位系統,同時配備有國家資質認證的真值設備作為定位基準,在多條指定路段進行長時間往復行駛(平均速度≥50 km/h,每條路段每次測試時間為4 h 左右,路程200 km 左右),將車載定位數據與真值設備記錄的定位數據對比,統計車載定位數據的圓概率(Circular Error Probable, CEP)誤差。由于篇幅限制,測試結果中只選取最有代表性,也最常用的水平位置誤差CEP95 作為判斷。
松耦合繞城高速與機場高速的兩次水平位置CEP95 相差都超過100%,如表1、表2 所示。經查證原因為第二次路測時路況較為擁堵,有大量卡車等大型車輛行駛導致車載定位系統的定位質量大幅下滑。反之緊耦合路測時也遇到了大量卡車擁堵場景,但其結果(表2)表明,緊耦合同一路段路測結果的水平位置CEP95 變化幅度遠小于松耦合結果中CEP95 的變化幅度,原因為緊耦合方案動態適應能力更強,因此,定位結果相對更穩定,同時也能看出緊耦合方案的水平定位精度相對更高。

表1 松耦合方案路測結果
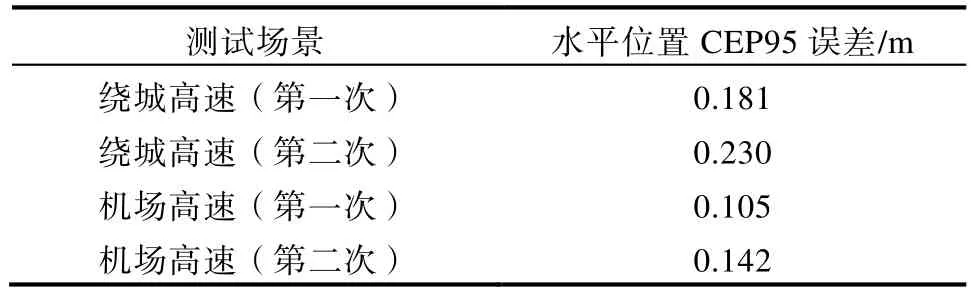
表2 緊耦合方案路測結果
5 結論
隨著汽車智能網聯能力的提升與自動駕駛技術的推廣,車載定位系統的價值及其所面臨的挑戰越來越高。在原有的單一GNSS 定位的基礎上,車載定位系統已逐步加入差分定位、慣導系統及對前兩者進行融合的組合導航,在提高定位精度的同時也進一步提升了車載定位的抗干擾能力及帶遮蔽環境下的動態適應能力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32