升力體飛行器飛行航區安全性精細化評估方法研究
2023-05-12 05:55:26戴世聰王美利薛鵬飛薛妙軼
航天控制 2023年2期
戴世聰 王美利 薛鵬飛 薛妙軼
空間物理重點實驗室,北京 100076
0 引言
飛行航區安全性即故障狀態下地面目標的安全性,重點關注故障狀態下飛行器殘骸對地面目標的毀傷風險。升力體飛行器具有飛行速度快、機動性強的特點,是目前國內外研究熱點[1-3]。為了開展升力體飛行器設計研究,需要開展大量的飛行試驗進行設計驗證與考核。不同于無升力的彈道式飛行器,升力體飛行器長時間在大氣層內飛行,其失控后的殘骸散布受殘骸氣動外形、大氣參數、失控點彈道參數等的綜合影響,一次飛行試驗中,故障狀態下可能的殘骸散布范圍沿飛行航線分布且寬度較大。傳統的安全性評估方法依據故障狀態下的殘骸散布劃定航區安全控制區,并限制特定等級以上的人口聚集區。但隨著國民經濟的發展,可選的飛行試驗航線附近不可避免的存在部分人口、財產密集的待保護區域,在開展飛行試驗時,需要對待保護區域的安全性風險進行精細評估,用于判斷對人員、物資轉移的必要性。
飛行器殘骸落入保護區的概率由出現故障的概率和出現故障后殘骸落入保護區的概率兩部分組成。出現故障后殘骸落入保護區概率的計算方法已較成熟,不是本文研究重點,一般根據蒙特卡洛打靶仿真給出概率分布,再根據保護區域位置與面積進行概率計算,見文獻[4-5]。對于故障概率計算,文獻[6]將故障概率按照“頻繁”到“不可能”劃分為5個等級,并給定各等級的發生概率,其計算結果需要進一步結合飛行器的可靠性分析結果進行修正。文獻[4]和[7]采用故障樹分析將飛行任務整體的故障拆解為幾個故障事件,未考慮飛行過程中故障概率的變化。文獻[8]和[9]將故障概率與航程或時間線性關聯,但實際飛行任務中各飛行剖面可能存在較大差異,導致單純按照時間或航程分析可靠性并不準確。因此需要一種能夠詳細考慮飛行過程中故障概率隨飛行狀態變化的評估方法,實現對殘骸落入保護區概率的詳細分析。
本文提出了一種基于可靠性分時評估的升力體飛行器飛行試驗安全性風險精細評估方法,通過對飛行器可靠性的分時段、分子系統評估,結合飛行仿真計算給出飛行航區安全性的定量評估結果。該方法能夠反映飛行器長時間飛行后各系統當前狀態和飛行歷程變化所帶來的故障概率差異,同時能夠反映飛行器各分系統的工作原理差異帶來的故障概率分布差異。
1 飛行安全性分析問題的提出與轉化
1.1 飛行安全性分析問題的提出與常規計算方法
針對飛行試驗中飛行器殘骸落入特定保護區域的概率開展計算分析方法研究。飛行過程中任意時刻均可能發生故障。
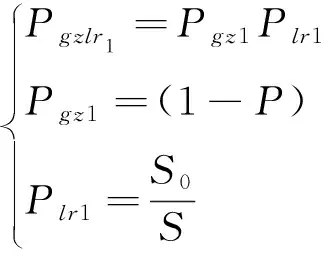
針對上述問題,按照不同的精細化程度有2類常規方法。精度較低的分析方法中,殘骸落入保護區的概率Pgzlr為:
(1)
其中P為飛行可靠性,S0為保護區域面積,S為故障下殘骸可能落入范圍的總面積。該方法忽略故障概率隨飛行的變化,也忽略殘骸落入保護區的概率隨保護區位置的變化,直接將全程故障概率與保護區面積占S的比例相乘,計算極為簡便但結果精度也可能存在量級上的差異。精度稍高的方法可以對故障概率Pgz1與故障后落入保護區的概率Plr1進行細化。現有文獻中,Plr1的計算主要基于打靶仿真獲取航區內殘骸落入各處的二維概率分布,并依據該分布和保護區的位置、大小計算殘骸落入保護區的概率,與本文相同。現有文獻中,Pgz1的計算主要基于時間或航程進行折算,該情況適用于飛行力、熱環境變化較小的長時間飛行過程的可靠性計算。當飛行環境隨時間變化劇烈時,力、熱環境對可靠性的影響已經不能忽略,仍然采用時間單變量評估可靠性則不準確。本文方法重點通過細分不同系統、不同時段或飛行狀態的可靠性,提高Pgz1計算的準確性。
1.2 飛行安全性分析問題轉化
考慮飛行器出現故障后的殘骸只會在特定的故障時段內落入保護區,因此可以首先根據飛行仿真與殘骸落點仿真計算結果,給出故障后殘骸可能落入保護區域的時間段T0~T1。如圖1所示,若飛行器在前臨界故障點發生故障,則殘骸散落范圍的遠界剛好與保護區域近界相接;若飛行器在后臨界故障點發生故障,則殘骸散落范圍的近界剛好與保護區域遠界相接。
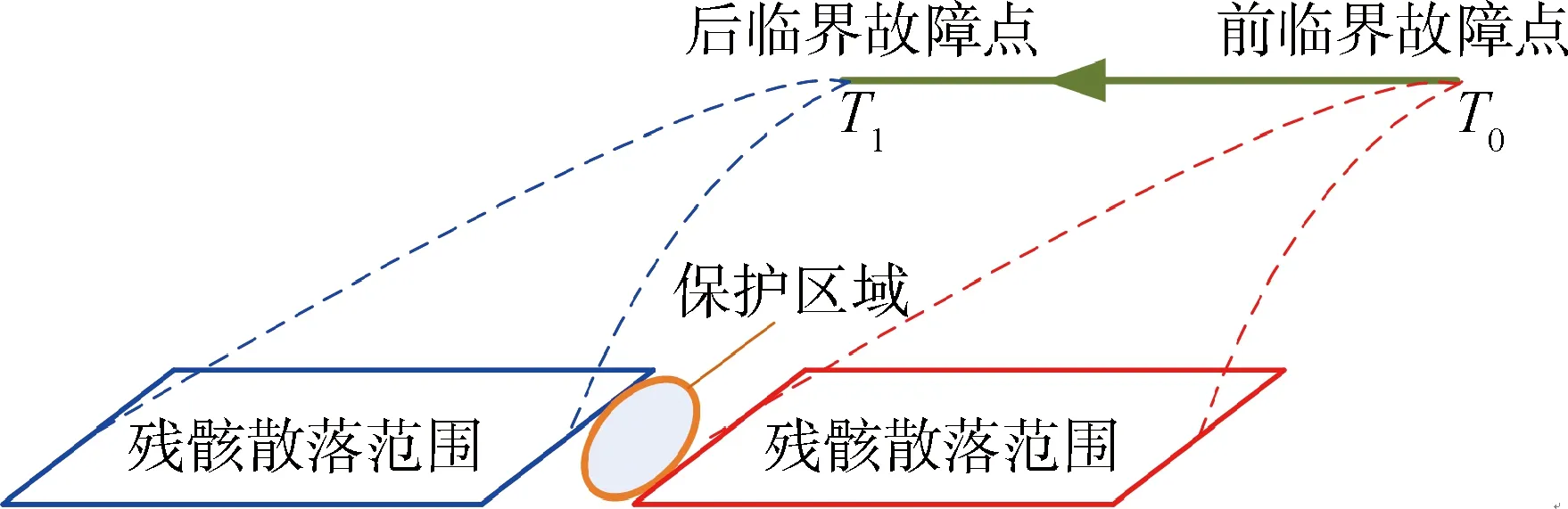
圖1 故障區段示意圖
由于在飛行時間T0之前以及飛行時間T1之后出現故障時,飛行器殘骸均不會落入保護區,因此在計算分析中可不必考慮,重點關注T0~T1間出現故障的情況。
1.3 時段與系統拆分
考慮到不同的飛行時間點上的故障概率以及故障后落入保護區域的概率均有不同。因此,為準確計算故障殘骸落入保護區的概率,需將分析區段細分為n段。分析區段內故障殘骸落入保護區的概率Pgzlr為
(2)
Pi_gz為特定區段內的故障概率,Pi_lr為特定區段內發生故障時殘骸落入保護區的概率。
將特定細分區段內發生故障的事件分解為飛行器飛臨保護區和飛行器在保護區發生故障兩個事件的串聯,即特定細分區段內的故障概率計算式為:
Pi_gz=Pi_fore·(1-Pi_crnt)
(3)
Pi_fore表示飛行器從起飛至特定位置的工作可靠度,由從起飛至特定位置的各飛行器分系統可靠度串聯相乘得到;Pi_crnt表示特定細分區段內工作可靠度,同樣也由特定細分區段內各飛行器分系統可靠度串聯相乘得到,即:
Pi_fore=Pi_fore_Sys1·Pi_fore_Sys2·Pi_fore_Sys3…
(4)
Pi_crnt=Pi_crnt_Sys1·Pi_crnt_Sys2·Pi_crnt_Sys3…
(5)
根據各飛行器分系統可靠性數據,確定每個飛行器分系統、每個細分區段內的工作可靠度、Pi_fore_Sys1、Pi_fore_Sys2、Pi_fore_Sys3、…、Pi_crnt_Sys1、Pi_crnt_Sys2和Pi_crnt_Sys3…
每個細分區段內的Pi_lr可針對殘骸散布形貌,通過氣動特性、質量特性等參數的拉偏打靶仿真得到,偏差模型取正態分布(3σ),其計算方法此處不再贅述。
2 升力體飛行器分時可靠性計算
2.1 飛行器系統組成可靠性框圖
典型的升力式飛行試驗飛行器由結構系統、防隔熱系統、控制系統、測控系統組成,其可靠性框圖見圖2。

圖2 升力式飛行器可靠性框圖
2.2 控制系統可靠度計算
控制系統主要實現飛行過程中對試驗飛行器的制導、姿態控制、時序控制和自主安控功能。控制系統一般由計算機、伺服系統、導航裝置、控制電池、電纜網等組成,控制系統全程工作可靠性框圖如圖3所示。
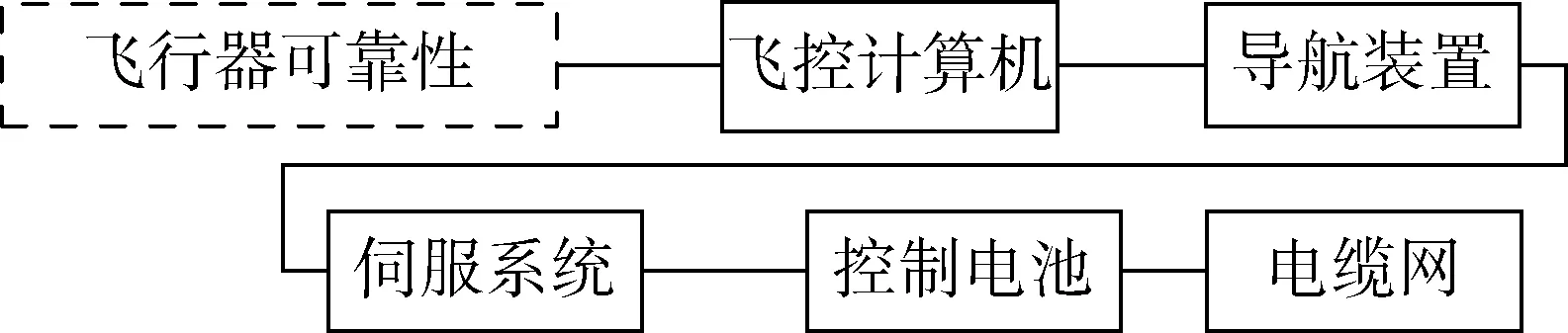
圖3 控制系統工作可靠性框圖
控制系統主要由各類電子設備組成,失效模式屬于指數分布特征,其可靠度與任務持續時間為減函數關系,計算公式見式(6)。

(6)
式中,λkz為與控制系統可靠性相關的常數,T為每個細分時間段的持續時間,t0為所關注飛行段的開始時間。
2.3 防隔熱系統可靠度計算
防隔熱系統可簡單劃分為防熱產品與隔熱產品。防熱產品的可靠性以飛行器表面溫度為可靠性特征量,本文假設飛行過程中飛行器表面溫度基本保持恒定,因此防熱產品的可靠性不會隨飛行段落而變化,故此處只考慮隔熱產品可靠性。在上述假設條件下,防隔熱系統的可靠性框圖見圖4。

圖4 防隔熱系統工作可靠性框圖
隔熱產品的主要功能是在外壁存在高溫的情況下阻止內壁溫度升高,保護飛行器內部的設備,因此選擇隔熱產品內壁溫度作為可靠性特征量。隔熱產品的隔熱性能統計特征可視為正態分布,因此,特定時間區段內隔熱產品可靠度計算公式如下:
第1步:計算tR:
(7)
式中:x為特定時刻隔熱特征點溫度、U為飛行器落地時刻隔熱特征點溫度;Cvs為隔熱產品置信度0.8下的變差系數,根據隔熱產品的驗收性能數據估計得到。
第2步:由tR查GB/T4086.1《統計分布數值表正態分布》,可得置信度為0.8的隔熱可靠度下限RL(0.8),根據前述定義,有:
Pi_fore_fgr=RL(0.8)
(8)
2.4 測控系統可靠度計算
測控系統除無線安控誤毀會導致飛行出現異常外,其余故障均不影響飛行,因此只需計算無線安控誤炸的可靠性。與無線安控相關的主要設備包括飛行器測控終端、接收機和安全自毀系統,可靠性框圖如圖5。
圖5 測控系統可靠度
測控系統與控制系統類似,同樣主要由各類電子設備組成,失效模式屬于指數分布特征,其可靠度與任務持續時間為減函數關系,計算公式如下:
(9)
式中:λck為與測控系統可靠性相關的常數,T為每個細分時間段的持續時間,t0為所關注飛行段的開始時間。
2.5 結構系統可靠度計算
結構系統主要起到在飛行載荷作用下保持飛行器外形、設備安裝結構變形量在要求范圍內且不發生破壞的作用。升力體飛行器飛行試驗中的載荷峰值主要集中在助推段和著陸返場段。助推段的飛行試驗安全性評估方法可采用傳統評估方法,本文不再贅述;而另一載荷峰值集中在著陸返場段,殘骸落區接近于落點,人口密集區域小而稀疏,不是本文分析重點。可見本文重點關注的助推結束到著陸返場開始之間的飛行段載荷低,一般相比高載荷飛行段低一個數量級以上,因此該段結構系統可靠性可視為1。
3 仿真校驗
以某升力體飛行器飛行試驗過程中飛行器故障殘骸落入保護區A的概率計算為目標開展仿真。
3.1 彈道仿真計算條件
在升力體飛行器六自由度運動學與動力學模型基礎上,根據飛行器質量特性、氣動特性參數,考慮風、大氣密度、氣動特性、質量特性、導航誤差等偏差量開展六自由度彈道仿真計算。
3.2 前后臨界點的確定與子時段劃分
首先,以未出現故障時的升力體飛行器質量特性與氣動特性、以及助推段交班參數及偏差為輸入,根據飛行打靶仿真結果,前臨界故障點殘骸散布中心與后臨界故障點殘骸散布中心之間的飛行時間為50s。將每5s劃分為一個子時段,總計10個子時段。飛行器飛臨前臨界點時刻的飛行時間為200s。
3.3 子時段內故障概率計算
根據上述計算方法和各系統產品性能實測結果,可得到每個區段內的可靠性,見表1、表2與表3。
表1 控制系統在保護區相關概率
表2 測控系統在保護區相關概率
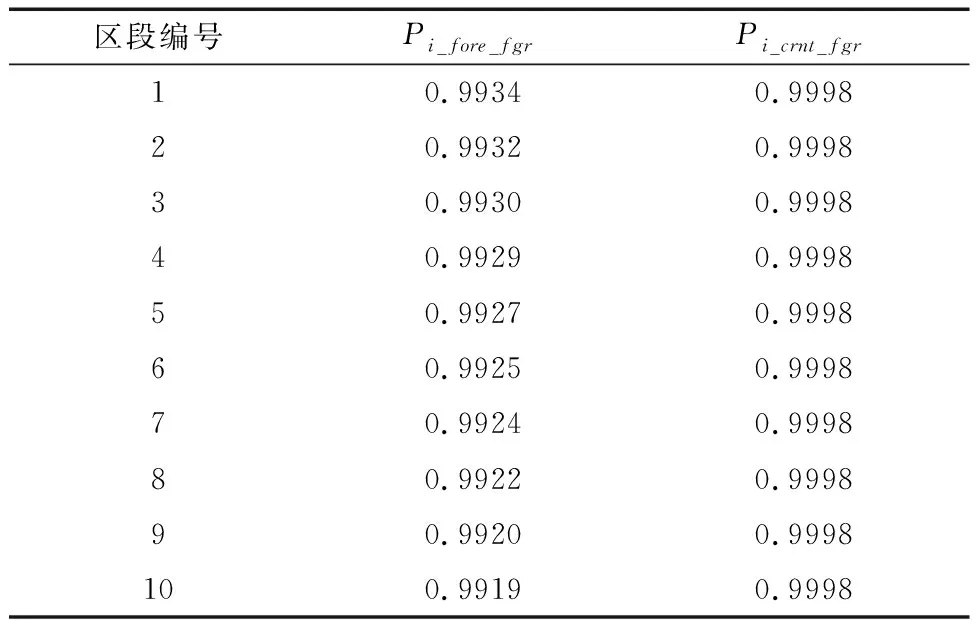
表3 防隔熱系統在保護區相關概率
由此根據式(2~5)可得各子時段故障概率,見表4。
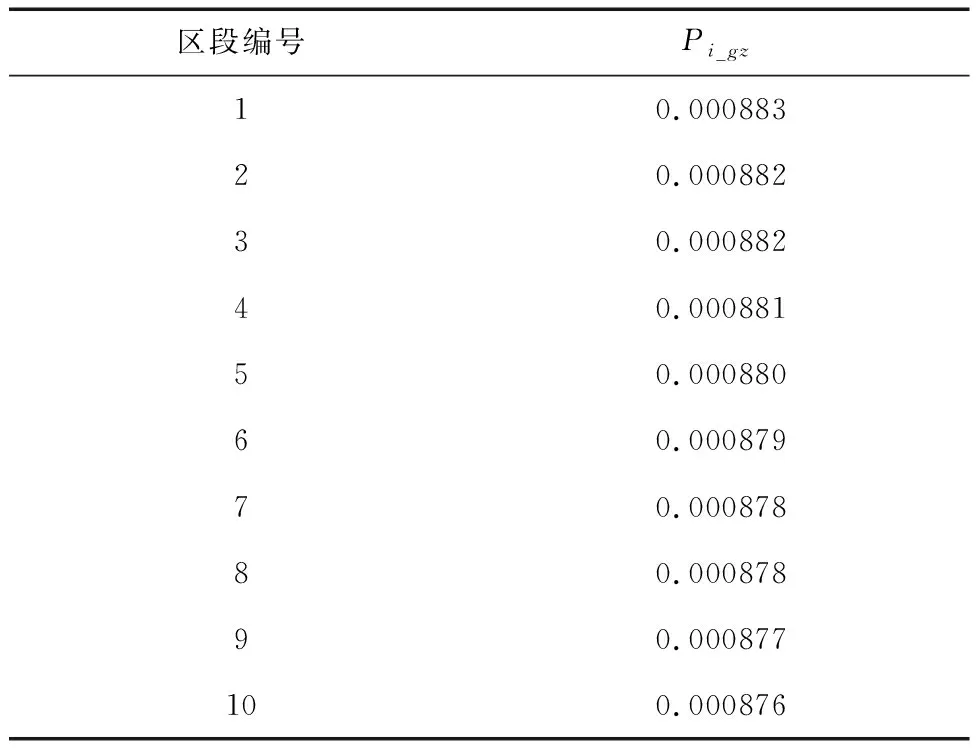
表4 飛行器在保護區發生故障概率
3.4 子時段內故障后殘骸落入保護區概率計算
以未出現故障時的升力體飛行器質量特性與氣動特性,以及助推段交班參數及偏差為輸入,根據無偏差彈道計算結果確定每個子時段開始時刻的位置、速度、姿態標準值,根據蒙特卡洛打靶仿真結果確定相應偏差量范圍。在此基礎上,從每一個子時段開始時刻,根據執行安全自毀后飛行器殘骸的質量特性、氣動特性參數,以及質心與姿態運動參數范圍,考慮3.1節所述偏差再次開展蒙特卡洛打靶仿真,獲取殘骸落入保護區A的概率,見表5。
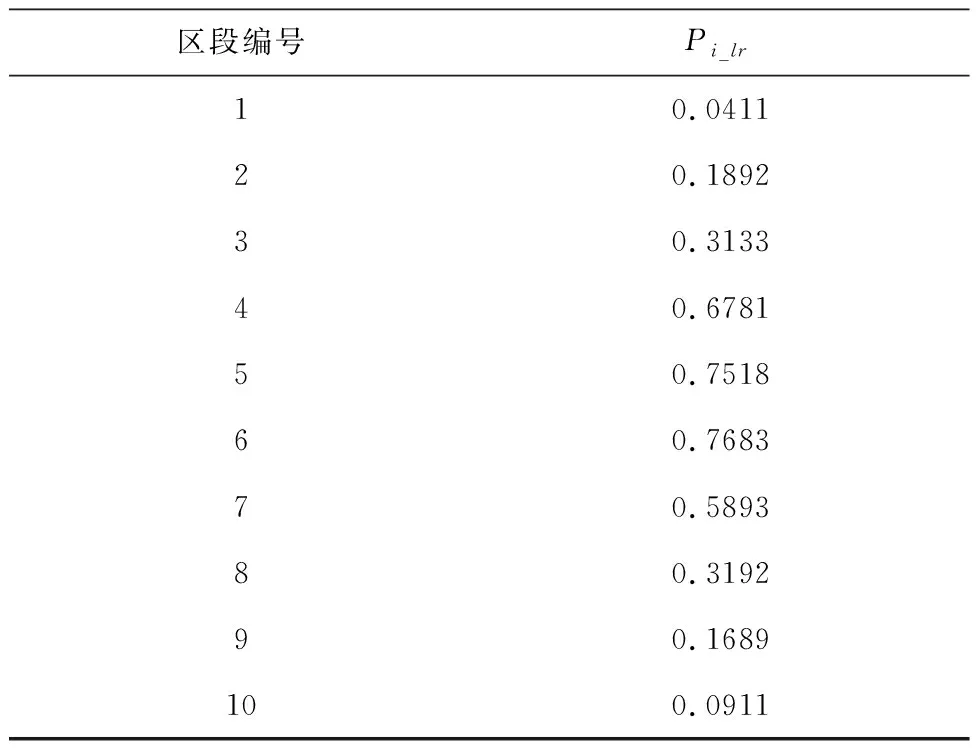
表5 飛行器故障后殘骸落入保護區的故障概率
3.5 落入保護區總概率計算
根據公式(2)以及表4和5中的數據,可得落入保護區總概率為0.34%。
4 結論
提出了一種基于可靠性分時評估的升力體飛行器航區安全性風險精細評估方法。文中首先對飛行安全性問題進行簡化與轉化,將飛行器殘骸在整個飛行任務中落入特定保護區的問題首先簡化為特定時段內殘骸落入保護區的問題,然后將之細分為若干子時段內飛行器出現故障和出現故障后落入保護區的概率計算。繼而,通過飛行器可靠性建模,給出典型的升力體飛行器各系統在各子時段內出現故障概率的計算方法。最后給出了仿真算例。
相對于傳統的基于故障樹,或基于時間或航程線性折算可靠性的安全性分析方法,該方法根據飛行器產品的實測參數和使用剖面環境的實際情況定量計算故障概率,結合對飛行時段的細化分解,能夠針對不同產品、不同飛行任務剖面、不同飛行時段給出細化的概率計算結果。該方法針對飛行器故障后殘骸落入特定保護區域的概率計算,能夠用于各類升力體飛行器的飛行試驗安全性分析。后續還將開展飛行器多特征指標可靠性計算方法研究,從而提高飛行器故障概率計算的準確性。
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
建材發展導向(2021年14期)2021-08-23 00:57:04
建材發展導向(2021年23期)2021-03-08 01:05:44
中華養生保健(2020年5期)2020-11-16 01:44:32
汽車維修與保養(2019年7期)2020-01-06 03:30:42
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34