無人機無線通信的信道安全加密方法*
2023-05-12 05:13:48朱保鋒陳立軍
航天控制 2023年2期
朱保鋒 陳立軍
1. 河南財政金融學院計算機與人工智能學院,鄭州450046 2. 廣州軟件學院,廣州 510990
0 引言
目前,無人機(UAV)已廣泛應用于情報偵查、火力打擊、電子戰(zhàn)誘餌、空中預警、反導攔截和信號中繼等應用。由于無人機暴露在空中,傳輸?shù)男畔⑻貏e容易被竊聽。保護信息不受竊聽者(Eve)的侵害,有2種基本方法:1)加強網(wǎng)絡層安全。必須在2個合法節(jié)點(節(jié)點A和節(jié)點B)之間預先建立一個密鑰,然后使用這個密鑰對大量信息進行加密和解密,以獲得基于計算的保密;2)物理層安全。通過對節(jié)點A和節(jié)點B的相關信息生成密鑰,或者將密鑰信息直接從節(jié)點A傳輸?shù)焦?jié)點B。直接傳輸需要從節(jié)點A到節(jié)點B的信道比從節(jié)點A到竊聽者的信道更安全。例如,無人機航跡或資源分配[1]和波束形成[2],使用全雙工無線電,這一要求通常不可能實現(xiàn),特別是無人機對地(U2G)通信,在U2G通信中,竊聽者通常是隱藏的,他們的能力也未知,而且目前帶內(nèi)全雙工通信的范圍可能不夠大,因此,在合法的一對無人機(節(jié)點A)和地面控制站(GS:節(jié)點B)之間沒有預先建立的密鑰,也不知道竊聽者的能力如何,要實現(xiàn)U2G通信的信息保密,應該利用無人機和GS的之間通信的物理層加密,實現(xiàn)無人機的安全通信。給定無人機和GS上的兩個ERCV,傳統(tǒng)物理層安全方法的中心任務將是分別在無人機和GS上提取一對數(shù)字密鑰[3]。但是在實踐中,ERCV的許多統(tǒng)計數(shù)據(jù)未知,因此直接從兩個ERCV生成可靠的密鑰是一個挑戰(zhàn)。物理層加密的關鍵工具叫做連續(xù)加密函數(shù)(CEF),它在文獻[4]中得到了進一步的發(fā)展。本文應用文獻[4]開發(fā)CEF隱藏無人機傳輸?shù)男畔⒑退幍淖鴺?實現(xiàn)了安全的U2G通信。
關于無人機坐標探測的研究有很多,如文獻[5]和[6]。最近,許多基于機器學習的方法被開發(fā)用于無人機坐標檢測,例如文獻[7]和[8]。此外,人們還開發(fā)了各種方法來降低坐標探測方法[9-10]的性能。程博等[11]提出空間相對懸停的脈沖控制方法,采用多次啟停功能的大推力軌控發(fā)動機實現(xiàn)軌道機動的沖量控制,對無人機航跡安全的分析進行了深入研究。與本文的出發(fā)點不同的是,他們主要關注無人機航跡的安全,本文提出的坐標隱藏方法利用了ERCV中的信息理論機密性,從理論上說,它阻止了任何方法成功探測隱藏坐標的可能。本文的工作也不同于文獻[12]和[13],文獻[12]隱藏的坐標可以被對手檢測到,文獻[13]隱藏的信息可以被對手檢測到。本文使用的無線信道模型,參見圖1。
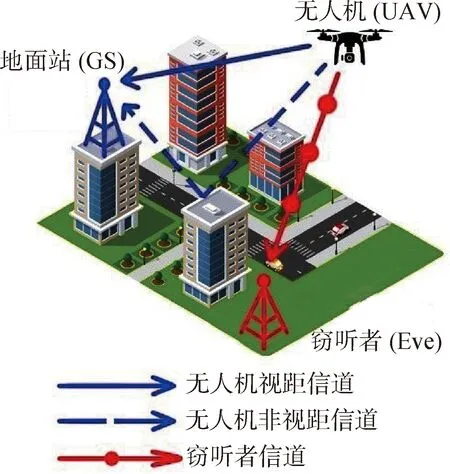
圖1 U2G通信中竊聽者在場的無線信道模型
1 無線信道模型
根據(jù)文獻[14],將無人機和地面站(GS)之間在n時刻(在毫秒量級的時間窗口內(nèi))的雙向傳輸(上行傳輸和下行傳輸)信道增益建模為:
(1)
其中,β0為單位距離下的大尺度信道平均功率增益,dn為U2G距離,αn為路徑損耗指數(shù),hn為小尺度衰減系數(shù),本文假設節(jié)點A和節(jié)點B都可以通過標準信道估計技術得到gn的估計值。此外,還假設dn和αn在感興趣的時間窗口內(nèi)沒有顯著變化,因此節(jié)點A和節(jié)點B也可以通過縮放gn的估計值得到hn的估計值。對于U2G通信,hn一般由兩部分組成:視距(line-of-sight, LoS)衰減和非視距(non-line-of-sight, NLoS)衰減[15]。視距(LoS)傳播(又叫視線傳播)是指無線信號在發(fā)信端與接收端之間無遮擋地直線傳播;非視距(NLoS)傳播(又叫非視線傳播)是指無線信號在發(fā)信端與接收端之間有遮擋地非直線傳播(利用多徑效應、反射、衍射、穿透進行傳播),在這種情況下,hn可以被建模為:
(2)
2 連續(xù)加密函數(shù)(CEF)簡介
設x是N×1的隨機向量,記為x∈RN×1,x的CEF是一個易于計算的映射,從x到實數(shù)y1,y2,…的序列,對于所有k≥1,該序列表示為yk=fk(x)∈R。文獻[17]中定義的CEF的屬性有4個:1) 很難(即用N表示的指數(shù)復雜度)從yk計算x,且k均≥1;2) 不存在x的k不變函數(shù)即g(x),yk是g(x)的一個易于計算的函數(shù),而且g(x)也易于從所有k≥1的yk中計算;3)x中的一個噪聲引起的yk的信噪比并不比x的信噪比少;4) 當一個隨機x的項相關性為0時,對于所有k≥1的yk只能具有非常弱的相關性。CEF前面2個屬性的證明非常困難,但可以通過經(jīng)驗確定;CEF的第3個特性可以通過與單元隨機投影(URP)的比較來衡量,即gk=Rkx∈RN×1,其中Rk對于每個索引k是一個偽隨機單元矩陣,URP的噪聲敏感性被認為是最佳的,因為每個k的gk中的擾動向量的規(guī)范總是與x中相應的擾動向量的規(guī)范相同,但是URP并不難反轉(zhuǎn);CEF的第4個特性可以通過模擬來驗證,對于URP,一般來說,在k=l的情況下,即使x的相關矩陣是身份矩陣IN,gk和gl之間有明顯的相關性,。


圖2 URP-CEF輸出與SVD-CEF輸出的相關性
本文將在物理層加密方法中應用SVD-CEF,Qk,l(k≥1,1≤l≤N)被假定為節(jié)點A、節(jié)點B和Eve(竊聽者)已知的公共信息。
3 物理層加密方法

3.1 基本方法



下一節(jié)將討論如何從CEF的輸出yk生成UD-QCPRNs的zk,并討論x′中的噪聲對z′k中的噪聲的影響。在第4節(jié)中,通過仿真研究了組合噪聲nk-wzk對節(jié)點B點性能的影響。
3.2 從SVD-CEF獲取UD-QCPRN

為了獲得具有均勻分布U(-B/2, B/2)的zk,可以證明,zk=TSVD(yk),有式(3):
(3)
其中θy=arcsiny,也有如下式(4):

(4)

(5)

(6)
這等同于文獻[17]中的ηk,x。


表1 Qk,l的百分比
wz=z′-z=TSVD(y′)-TSVD(y)≈BwyfY(y)
(7)
也由式(7)得式(8):

(8)


圖3 α=10-5時ηy,z與N的關系圖
4 飛行仿真
本節(jié)展示了所提方法的仿真結(jié)果,實驗在Matlab環(huán)境下進行,結(jié)果說明了信道噪聲和加密噪聲對節(jié)點B性能的影響。如前所述,本文可以只關注M-PAM。
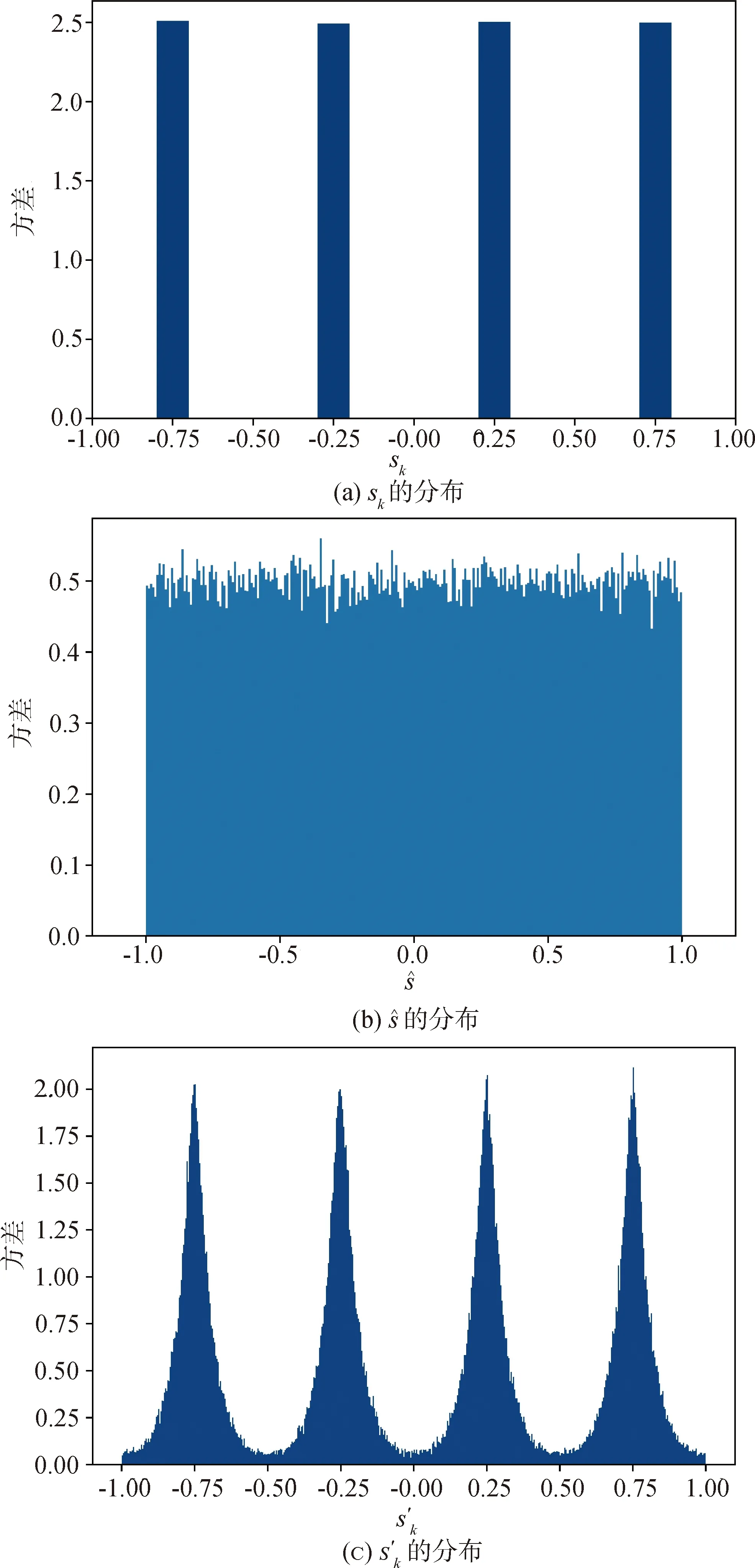
圖4 和的分布
一旦節(jié)點B獲得了足夠的s′k樣本,就可以使用任何現(xiàn)有的坐標檢測方法[7-8]檢測M(如果節(jié)點B不知道),然后使用最小距離法檢測秘鑰符號。在不同參數(shù)下,節(jié)點B點的符號誤碼率(SER)仿真結(jié)果如圖5~7所示。
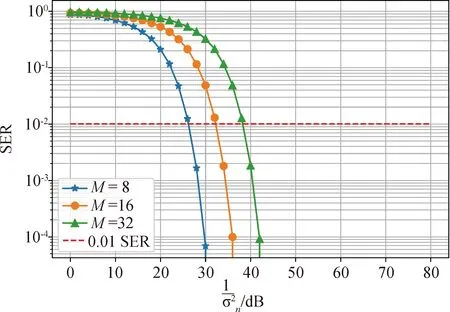
圖5 SER與無加密噪聲的的關系圖(對于不同的M)
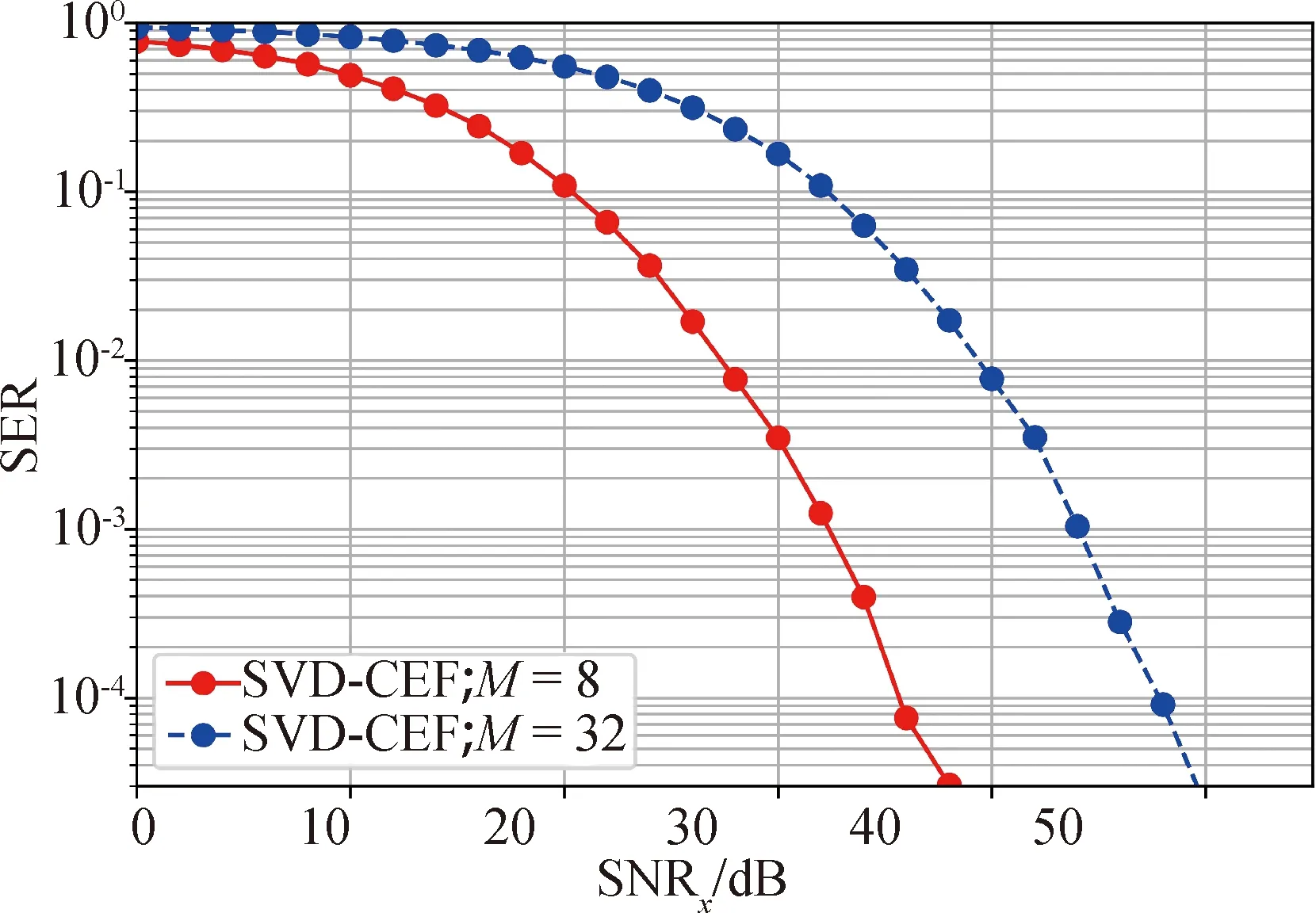
圖6 具有可忽略信道噪聲的SER與SNRx的圖(當N = 16和不同M時)
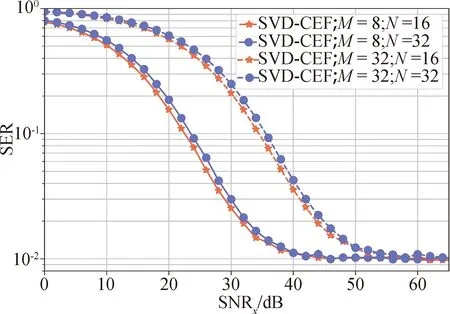
圖7 SER與SNRx的關系圖(對于每一個M的的值)

5 結(jié)論及未來工作
開發(fā)了一種新的物理層加密方法,用于無人機在空中傳輸?shù)男畔⒒蜃鴺穗[藏,以對抗對手可能的任何探測方法。該方法利用了節(jié)點A和節(jié)點B之間雙向通道中的信息保密,同時增加了基于計算的保密,以保護任意數(shù)量的信息不受對手攻擊。使用基于奇異值分解的SVD-CEF,將有限維的秘密實值向量轉(zhuǎn)換為無限長的QCPRN序列。結(jié)果顯示這些QCPRN的統(tǒng)計數(shù)據(jù)對于節(jié)點A和節(jié)點B的ERCV統(tǒng)計數(shù)據(jù)的一系列變化是相當穩(wěn)健的,從而證明了本方法可以確保無人機的航空安全。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28