輕型車輛線控制動技術(shù)研究現(xiàn)狀及發(fā)展趨勢研究
2023-05-26 09:48:56王子龍
中學(xué)生學(xué)習(xí)報·教研周報 2023年8期
關(guān)鍵詞:發(fā)展趨勢
王子龍
摘 要:在當(dāng)前形勢下,新能源汽車,特別是無污染無公害純電動汽車的發(fā)展,不僅對中國的能源安全和環(huán)境保護(hù)具有重要意義,而且是中國汽車產(chǎn)業(yè)改造升級和技術(shù)突破的重要方向。本文對輕型車輛線控制動技術(shù)研究現(xiàn)狀及發(fā)展趨勢進(jìn)行分析,以供參考。
關(guān)鍵詞:輕型車輛;線控制動技術(shù);發(fā)展趨勢
引言
大部分現(xiàn)代電動汽車?yán)秒妱雍驼婵毡脼橹苿右r片提供真空泵,最終通過液壓制動系統(tǒng)提供制動功能,這些系統(tǒng)提供了成熟和先進(jìn)的控制,但電動真空泵和真空泵作為附加裝置安裝在車輛制動管路中,增加了制動系統(tǒng)的結(jié)構(gòu)復(fù)雜性和可靠性,限制了系統(tǒng)可靠性。直線制動系統(tǒng)、制動裝置不定向于制動缸,制動操作人員必須設(shè)置為傳感器比電機(jī)制動更少的制動裝置,通過液壓控制器進(jìn)入或進(jìn)入專用制動裝置,以完全通過制動操作,彌補(bǔ)了傳統(tǒng)制動系統(tǒng)設(shè)計和原理所導(dǎo)致的不足,使制動控制得到最大的自由度。
1系統(tǒng)結(jié)構(gòu)與工作原理
在制動系統(tǒng)中直驅(qū)泵的優(yōu)勢在于,傳統(tǒng)液壓制動系統(tǒng)需要先建立制動主缸壓力,再通過管路傳遞到制動輪缸,直驅(qū)泵控制動系統(tǒng)不使用傳統(tǒng)液壓伺服元件,摒棄了先由主缸升壓再傳遞到輪缸的壓力建立模式,使伺服電機(jī)驅(qū)動的液壓泵直接作用于制動輪缸,以此推動活塞和摩擦襯片壓緊制動盤來提供制動力。新型泵控直驅(qū)式線控制動單元由電控單元、伺服電機(jī)、雙向齒輪泵、低壓蓄能器、壓力傳感器、制動輪缸等組成,解決方法是用旋轉(zhuǎn)電機(jī)的輸出軸直接驅(qū)動液壓泵,液壓泵的液出口開口與制動車輪缸相連,即液壓泵直接驅(qū)動車輪缸活塞,正液進(jìn)口開口與低壓蓄電池相連,以便由于使用了主制動回轉(zhuǎn)缸,右泵直接接觸制動輪缸的配置,需要為汽車的每個車輪分別安裝制動單元,以便精確調(diào)節(jié)制動功率。制動時,根據(jù)制動功率要求,壓力傳感器輸出控制信號到機(jī)組控制伺服電機(jī),電機(jī)輸出軸直接驅(qū)動雙向液壓泵;雙向液壓泵的直接液體出口孔與制動輪缸相連,直接液體進(jìn)口孔與低壓蓄電池相連;直驅(qū)泵控制動作單元的控制過程如下:過壓過程中伺服電動機(jī)轉(zhuǎn)動,轉(zhuǎn)矩增大,制動輪缸壓力增大,制動輪缸活塞輸出力增大;在壓實過程中,伺服電動機(jī)輸出恒定轉(zhuǎn)矩,制動輪缸壓力保持不變;在減壓過程中,伺服電動機(jī)處于自由狀態(tài),制動輪缸壓力降低;制動結(jié)束時,制動輪缸活塞在制動輪缸密封墊圈作用下重新定位。此時制動輪缸活塞的輸出力為0。
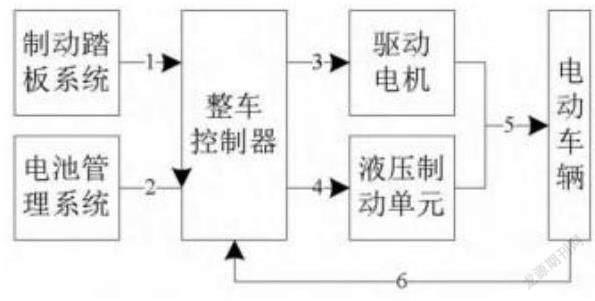
2線控液壓制動系統(tǒng)構(gòu)架
制動踏板系統(tǒng)將駕駛員的制動意圖轉(zhuǎn)換為電信號,并將該電信號處理后通過1發(fā)送給整車控制器;電池管理系統(tǒng)將此時動力電池的工作狀態(tài)通過2發(fā)送給整車控制器,其中包括故障信息、電池允許最大充放電功率、電池SOC等;整車控制器在接收到以上信息后首先對制動信號進(jìn)行解析并得到需求制動扭矩,必須使用電池狀態(tài)將所需轉(zhuǎn)矩3、4分配給驅(qū)動電機(jī)和液壓制動單元,該狀態(tài)下的要求轉(zhuǎn)矩可以通過能量回收來訪問。然后,驅(qū)動電機(jī)和液壓制動單元根據(jù)所需扭矩切換到車輛上。最后一輛車通過6向車輛控制器報告車輛速度狀態(tài),該控制器確定制動是否達(dá)到預(yù)期性能,如果不是預(yù)期值,則調(diào)整轉(zhuǎn)矩分布,最后允許控制車輛的制動過程。
3被動式制動踏板模擬器
被動式模擬器的結(jié)構(gòu)一旦設(shè)定便無法調(diào)節(jié),相應(yīng)的踏板特性也固定不變,其結(jié)構(gòu)可以分為彈簧模擬器和液壓式模擬器。彈簧式模擬器使用彈簧來模擬踏板力,彈簧可以有多種類型選擇,如圓柱螺旋壓縮彈簧、截錐螺旋壓縮彈簧和特殊材料彈簧。彈簧式模擬器的發(fā)展趨勢是將許多彈簧組合起來,以獲得制動踏板位移和制動踏板力之間的非線性關(guān)系,因為普通彈簧是線性的,因此不適用于制動踏板模擬器。一些電子制動踏板還通過安裝阻尼器,改善駕駛員對彈簧式模擬器的感覺。建立電子制動踏板模擬器模型,其模型考慮了真空助力器的結(jié)構(gòu)間隙、彈簧預(yù)速度、摩擦力和反作用盤特性。液壓式模擬器由整體橡膠彈簧和氣缸組成,與彈簧式相比,液壓式結(jié)構(gòu)較為復(fù)雜,制造成本較高,維護(hù)也較為不便,但是其制動踏板力與踏板行程的一致性關(guān)系要好很多。設(shè)計有此類踏板模擬器,主要特點是將模擬器和主缸集成到一起,并且模擬器直接與制動踏板相連,這樣設(shè)計的優(yōu)點是可以保證良好的踏板感覺,減小多余因素的影響,模擬器占用的空間較小,但同時其缺點是:①生產(chǎn)較為復(fù)雜繁瑣,對加工精度要求較高;②由于橡膠材料的存在,在低溫狀態(tài)下剛度變化大,容易引起踏板感的變化。
4安全控制系統(tǒng)
BBW安全控制系統(tǒng)的相關(guān)研究主要集中在可靠性分析和容錯控制方面,其最終目的是最小化系統(tǒng)的硬件、最小化網(wǎng)絡(luò)帶寬、最大化容錯和最小化維護(hù)成本。在系統(tǒng)可靠性分析方面,相關(guān)學(xué)者提出了故障模式分類、危害性分析模型、風(fēng)險分析、故障事件樹等方法。目前常用的有故障分類模型和故障樹分析模型。在容錯控制方面,有主動容錯控制和被動容錯控制,主動容錯控制將根據(jù)故障模式的不同,改變控制系統(tǒng)的架構(gòu)和參數(shù),在系統(tǒng)局部功能失效的情況下保證正常運行,而被動容錯控制則有著固定的系統(tǒng)架構(gòu)和參數(shù)。湖南大學(xué)劉攀針對BBW系統(tǒng)執(zhí)行器失效的工況,提出了基于貝葉斯網(wǎng)絡(luò)的故障診斷方法,基于上述故障信息提出了BBW系統(tǒng)的主動容錯控制策略并進(jìn)行了仿真分析,針對七種不同的失效情況,控制車輛的縱向制動力再分配和前輪轉(zhuǎn)角介入補(bǔ)償。
結(jié)束語
綜上所述,(1)提出了一種泵控直驅(qū)式線控制動單元,建立了伺服電機(jī)和液壓系統(tǒng)的數(shù)學(xué)模型,確定了制動單元的壓力需求。試制了線控制動單元并搭建試驗平臺,進(jìn)行了響應(yīng)特性和跟隨特性仿真和分析試驗。(2)試驗證明泵控直驅(qū)式線控制動單元階躍響應(yīng)速度良好,達(dá)到穩(wěn)態(tài)后波動和誤差較小,能夠在一定范圍內(nèi)增壓和保壓,能夠?qū)χ苿恿M(jìn)行快速調(diào)節(jié),驗證了方案的可行性。為后續(xù)泵控直驅(qū)式線控制動系統(tǒng)的控制方法研究奠定了基礎(chǔ)。
參考文獻(xiàn):
[1]尤永瀚,張麗,馬萬成,張晶鑫.基于ESC的某無人駕駛小型客車線控制動系統(tǒng)設(shè)計[J].客車技術(shù)與研究,2021,43(05):1-3.
[2]黃禮,黃祖朋,鐘日敏.電動汽車線控制動系統(tǒng)硬件在環(huán)測試方法研究[J].汽車實用技術(shù),2021,46(17):11-13.
猜你喜歡
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 18:10:09
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 15:51:16
現(xiàn)代經(jīng)濟(jì)信息(2016年19期)2016-10-20 15:26:02
中國科技博覽(2016年19期)2016-10-19 13:03:52
中國科技博覽(2016年18期)2016-10-19 09:22:46
中國市場(2016年35期)2016-10-19 01:55:52
商場現(xiàn)代化(2016年22期)2016-10-18 20:54:08
科學(xué)與財富(2016年28期)2016-10-14 20:02:56
科學(xué)與財富(2016年28期)2016-10-14 19:52:27
科學(xué)與財富(2016年28期)2016-10-14 19:36:54
