公路養護作業區限速控制方法研究
2023-06-11 11:50:44羅嵩
交通科技與管理 2023年10期
關鍵詞:技術研究
羅嵩

摘要 文章介紹公路養護施工控制區段構成和可變限速控制原理,圍繞解決傳統限速控制的方法基本完全依賴于既有交通參數關系所表現出的一定程度上的滯后性問題,闡述了基于神經網絡的可變限速控制方法。BP網絡計算方法能夠克服傳統方法的滯后性問題,但存在局部極小值困擾。RBF網絡計算方法則可以同時克服兩個不足。
關鍵詞 公路養護;作業區;可變限速;控制方法;技術研究
中圖分類號 U418文獻標識碼 A文章編號 2096-8949(2023)10-0051-03
0 引言
可變限速控制是指在施工期間,為保障施工人員和過往車輛的安全,采用可變限速控制調整車輛速度,并配置警示設施的秩序維護和安全控制技術之一。在實際施工中,機械靜態限速控制不利于施工區可應用條件的最大化發揮和利用,而早期多指標模型分析控制方法的模型本身相對固化,基本完全依賴于既有交通參數關系,不能適應交通狀態的非線性和時變性特點,一定程度上具有滯后性。人工神經網絡分析技術興起后,該技術引入可變限速控制分析,初期的BP神經網絡分析對上述問題有所克服,但同時容易陷入局部極小值的困擾,對于新問題,RBF神經網絡提供了解決方法。該文將結合工程實例,介紹施工控制區的神經網絡可變限速控制方法,供同類工程參考。
1 施工控制區段與可變限速控制
1.1 施工控制區段構成
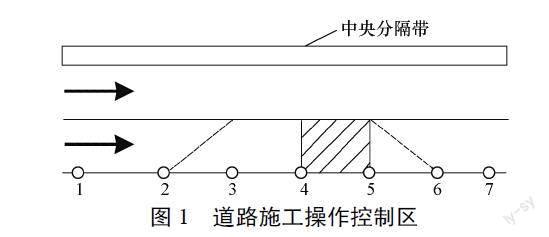
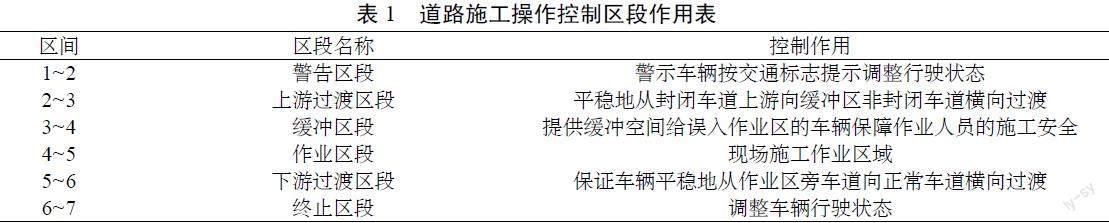
《城市道路施工作業交通組織規范》(GA/T900—2010)要求占道施工須設置控制區,主要包括警示、上游過渡、緩沖、作業、下游過渡、終止等6個區段,具體見圖1所示。其中各區段的功能作用見表1所示[1]。
施工控制區限速需符合下述4方面規定:①于警示區內完成限速過程;②采取重復限速或逐級限速提示方法,按每100 m降低10 km/h的標準逐漸限速,配置限速標志,其相鄰距離不宜低于200 m;③最終速度限制不應高于表2參數,最終速度限制所對應的車道預留寬度低于表中標準時,宜降低最終速度限制值;④限速組合對應的安全長度計算參考表3參數。
1.2 可變限速控制原理
可變速度控制原理是根據實時采集的交通、天氣、道路等信息,構建可變限速控制分析模型,根據效率或安全等控制目標,確定區段的最優速度限制值,并以可變信息標志給予發布,以控制作業區的交通狀態。
較早的可變限速的模型化控制,依賴于既有交通參數關系,不能適應交通狀態的非線性和時變性特點,一定程度上具有滯后性。BP網絡分析方法興起后,借助神經網絡分析,該技術的不足逐漸得到克服。
2 基于BP網絡分析的可變限速方法
2.1 BP神經網絡
反向傳播(BP)神經網絡是應用廣泛的神經網絡,具有很強的非線性映射性能,可以大量學習和儲存非線性映射關系,輸入輸出數據流,實現非線性復雜映射[2]。
2.2 基于BP網絡計算的可變限速控制
基于BP網絡計算的非線性系統函數建模總體分三步實現,即構建BP神經網絡、網絡信息訓練和網絡預測。
由系統輸入及輸出運算,確定網絡層數,樣本數據分為訓練數據與測試數據,其中訓練數據用于訓練神經網絡,利用訓練后的網絡的預測函數輸出預測數據,并對預測成果進行分析。
兼顧施工區限速控制、施工效率與安全需求,應用BP可變限速控制器實現施工區交通流控制。選擇上游區段密度、車速、大車率、交通量等4個因素的代表參數輸入神經網絡開展控制計算。神經網絡輸出是可變限速序列,通常包含3個可變限速值。
首先確定樣本,樣本分為訓練學習和測試兩種樣本,前者用于網絡學習訓練,后者用于網絡精度測試,對收集的樣本做歸一化處理,通過仿真軟件Vissim,獲得神經網絡的訓練學習樣本。在模擬中,通過不斷改變大車率和交通量,收集神經網絡所需的輸入值,輸入后不斷嘗試限速組合運算,找到特定輸入條件下的最佳限速序列。
前述過程分別對應4個輸入和3個輸出,其中交通量取1 000~3 500輛/h,按250或500輛/h選擇1次,共選擇7個交通量輸入。大車率范圍10%~50%,選擇10%。總共輸入了5種大車率。結合約束條件和相鄰限速標志之間的限速值范圍,經過排列組合,所述交通量與大車率條件下,存在128種限速序列組合。采用兼顧效率和安全的綜合評估指標,確定最佳限速序列。
3 基于RBF網絡分析的可變限速控制方法
3.1 RBF神經網絡
RBF神經網絡也稱徑向基函數神經網絡,與BP神經網絡一樣,也是一種前饋型網絡,能夠逼近任何非線性函數。
在RBF神經網絡訓練中,高斯函數常作為隱含單元的徑基函數,其激活函數如下[3]:
式中,σ——高斯函數方差;ci——高斯函數的中心;——歐式范數。則RBF網絡的輸出:
式中,P——樣本總數;xp——輸入的第p個樣本;ci——隱含層的節點中心;h——隱含層結點的總數;wij——隱含層層至輸出層的權值;yj——對應輸入樣本的第j個輸出。如果d為期望樣本的輸出,那么基函數方差如下:
在RBF網絡中,基函數從輸入層至隱含層的輸出呈現非線性映射關系,而輸出卻呈現線性,則RBF網絡就實現了從非線性輸入到線性輸出目的。RBF網絡可以映射任何非線性的復雜關系,其訓練規則簡單,魯棒性強,非線性映射、記憶能力和自訓練能力,從根本上克服BP網絡存在的局部極小問題。
3.2 基于RBF網絡的可變限速控制
RBF神經網絡學習方法的分類與決定網絡結構特點的參數構成有關。RBF的網絡參數由三部分構成:徑向基函數的中心c、方差σ和隱含層到輸出層的權值w。
隱含層基函數中心c的選擇方法有正交最小二乘法、自組織選擇法和隨機選擇法。該研究采用K-means的學習方法,即以自組織選擇方法訓練RBF神經網絡。其中學習方法由兩個過程構成:第一個過程是計算隱含層基函數的中心和方差;第二個過程是找到從隱含層至輸出層的權重。學習訓練過程如下:
第一步:由K-means聚類方法尋找基函數的中心c。
(1)初始化網絡:隨機選擇n個樣本作為基函數中心ci(i=1,2,…,h)。
(2)按相鄰最近原則分組樣本:根據聚類中心ci至xp之間的歐式距離,將xp分組至學習樣本的p(p=1,
2,…,P)聚類集合中。
(3)聚類中心重新調整:統計p中學習樣本的均值,獲得新聚類中心。新舊聚類中心進行對比,如果兩者相等,那么所得聚類中心c即為基函數中心。如果二者不等,則向上一步驟返回,進行基函數中心的下一循環計算。
第二步:方差計算。以高斯函數作為神經網絡的基函數,其方差計算如下:
式中,cmax——被選擇的所有聚類中心間的長度最大值。
第三步:以最小二乘方法,計算隱含層至輸出神經元間的w權值:
借助Matlab系統構建RBF網絡。RBF網絡中,網絡性能受徑向基函數的Spread擴展系數的影響較大。選擇合理的Spread系數很重要。通過不斷地運行嘗試,最終可以得到優化的Spread系數為11。
4 實例分析
為驗證RBF可變限速控制的功效,該研究將其應用于高速公路施工區域的實例中。某路面養護工程的施工區段某雙向六車道,位于某市的三環路以南,螺洲橋和魁浦橋之間,施工區域總長度約2.00 km。施工區為封閉部分單幅車道施工區,封閉外側的一條車道。
基于工區勘測信息,該研究應用Vissim模擬系統進行仿真,建立模擬施工區段,輸入基本交通數據,模擬運行時長4 200 s,初600 s為預熱時間,分別進行無變速控制、RBF網絡控制和優化的BP網絡控制的狀態仿真。不同控制下的密度和速度變化曲線表明,無限速控制時,施工區域保持比較大的過流密度,速度處在比較低水平。但在RBF和優化的BP網絡算法控制下,施工區域的過流速度都不同程度地獲得了提高,交通流密度有所降低。
限速警示標志所在區間的限速變化曲線見圖2~3所示。RBF網絡控制在小范圍內波動,導致頻繁改變限速值,相比之下,優化的BP網絡控制則表現穩定,顯示優化的BP網絡控制方法優于RBF網絡控制方法。
除了比較交通流參數之外,安全和效率指標見表4所示。數據顯示,相比無限速控制,早期多指標模型分析方法和神經網絡分析方法均可以不同程度地提高作業區的通行效率與安全。其中經過遺傳運算優化以后的BP網絡分析的效果最好,降低延誤69.30%,降低沖突比例59.00%,使交通量提升7.90%。安全和效率指標的比較結果見表4所示。
從表4可以發現,與無限速控制相比,可變限速方法和神經網絡計算方法都不同程度地增強了施工區域的安全性和過行效率。其中優化的BP網絡算法的功效最好,沖突率降低了59.00%,延誤降低了69.30%,提高交通量7.90%。BF網絡算法次之,早期多指標模型分析方法再次之。仿真結果顯示,神經網絡計算方法能夠獲得較好的限速控制值,進而有效提高了作業區域的通行效率與安全性。
5 結語
該文結合分析工程實例,基于對公路養護作業區限速控制方法的研究,介紹了公路養護施工控制區段構成、可變限速控制原理,揭示了早期變限速控制分析計算存在的技術不足,闡述了基于神經網絡分析的可變限速控制方法。研究表明,基于BP網絡計算的可變限速分析控制方法克服了之前的可變限速控制分析存在的不足,對于BP的極小值困擾問題提供了解決方法,但也再度面臨了容易陷入局部極小值的困擾。實例分析結果也顯示,優化的BP網絡算法的功效最好,BF網絡算法次之,早期多指標模型分析方法再次之。神經網絡計算方法能夠獲得較好的限速控制值,進而有效地提高了作業區域的通行效率與安全性。
參考文獻
[1]劉春春. 基于仿真技術的高速公路施工區交通安全措施研究[D]. 成都:西南交通大學, 2012.
[2]朱永光. 高速公路施工區交通組織與作業段長度優化研究[D]. 西安:長安大學, 2010.
[3]程爽. 基于交通特性的高速公路改擴建工程合理分段方法研究[D]. 武漢:武漢理工大學, 2013
猜你喜歡
電子技術與軟件工程(2016年22期)2016-12-26 16:05:49
安徽農學通報(2016年21期)2016-12-22 16:12:49
電子技術與軟件工程(2016年19期)2016-12-19 19:59:57
電子技術與軟件工程(2016年19期)2016-12-19 17:53:16
東方教育(2016年4期)2016-12-14 11:29:43
科學與財富(2016年26期)2016-12-01 11:05:43
科學與財富(2016年26期)2016-12-01 10:55:07
新媒體研究(2016年18期)2016-11-15 00:51:06
企業技術開發·中旬刊(2016年10期)2016-11-12 14:55:41
數字技術與應用(2016年9期)2016-11-09 23:24:20
