基于STM32的智能物料搬運控制系統設計
2023-06-25 17:24:43楊旭季嫣然郭守娜林希寧
現代信息科技 2023年10期
楊旭 季嫣然 郭守娜 林希寧

摘? 要:為了提高倉儲物流自動化與智能化水平,達到物流搬運行業提高工作效率與減少生產成本的目的,著力于設計一套基于STM32的智能物料搬運控制系統,使機器人實現行進控制、循跡定位、顏色及二維碼識別、物料抓取與精準碼垛等功能。根據設計需求進行分析,文中明確了物料搬運機器人的開發功能,將機器人設計劃分為結構設計、電路設計、控制系統、視覺檢測四個部分。為智慧物流加工行業解決人工勞力搬運分揀以及低智能機器低速低效搬運碼垛的問題提供了一種可行方案。
關鍵詞:STM32;物流搬運機器人;循跡定位;物料抓取
中圖分類號:TP212;TP311 文獻標識碼:A 文章編號:2096-4706(2023)10-0154-04
Abstract: In order to improve the automation and intelligence level of warehousing and logistics, and achieve the purpose of improving work efficiency and reducing production costs in the logistics and handling industry, this paper focuses on designing a set of intelligent material handling control system based on STM32, so that the robot can realize the functions of travel control, tracking positioning, color and two-dimensional code recognition, material grabbing and accurate palletizing. Make an analysis according to the design requirements, this paper clarifies the development function of material handling robots, and divides the robot design into four parts: structural design, circuit design, control system, and visual inspection. It provides a feasible solution for the intelligent logistics processing industry to solve the problems of manual labor handling and sorting, low-speed and inefficient handling and palletizing of low-intelligent machines.
Keywords: STM32; logistics and handling robot; tracking positioning; material grabbing
0? 引? 言
隨著物流裝備技術的逐漸成熟,物料搬運技術也逐步向智能化方向發展[1]。在國家經濟保持穩定發展的趨勢下,政府出臺了“中國制造2025”等一系列產業振興政策,物料搬運在設備智能化、自動化發展環境中擁有不可忽視的競爭力。目前在很多實際生產加工過程中,物料搬運仍舊采用人工方式,即便裝備了智能機器,搬運效率依舊耗費大量成本,無法達到預期的智能化水平。為此,通過模擬實際物料搬運場景[2],本文提出了智能物料搬運機器人的解決方案,通過對機械結構、硬件電路和控制系統的設計,應用視覺檢測和定位技術,構成了具有自主移動、路徑規劃、物料抓取與智能碼垛功能的搬運機器人,該設計方案對提升物料搬運技術的智能化水平具有重要意義。
1? 問題提出
1.1? 模擬作業環境描述
如圖1所示,模擬工廠為邊長2.4 m的正方形,內設休息區、任務區、物料區、加工區、成品區,地面由經緯線劃分,便于機器人循跡。為了模擬工件和易于教學實驗,將物料簡化為圓柱或長方體,可由3D打印完成,顏色分別為紅、綠、藍,不同顏色代表不同材質、不同用途的物料。
1.2? 機器人作業要求
機器人搬運物料的全過程采用自主導航模式[3],其工作流程為:機器人自休息區出發,依次循跡至物料區和任務區,并通過圖像識別模塊識別任務二維碼、物料顏色和物料當前位置順序;根據任務要求,機器人在物料區和加工區之間往返,將物料搬運至加工區;之后,在加工區和成品區之間往返,最終將物料全部搬運至成品區;搬運任務完成后,機器人自動返回休息區。
2? 系統設計方案
2.1? 結構設計
機器人的設計包括結構設計、電路設計、控制系統、視覺檢測四個部分,只有把這四個部分互相融合才能實現機器人的全部功能。機器人整體結構包括底盤、儲物模塊和抓取模塊,整體結構圖如圖2所示。其中,抓取模塊由絲桿、云臺電機和舵機組成,絲桿上部配置2006減速電機控制絲桿轉動,配合滑軌控制機械手爪上下移動;絲桿底部云臺電機6020控制抓取模塊整體旋轉。底盤選用麥克納姆輪。儲物模塊設計成圓弧走向的3個圓柱筒,用來臨時存放物料。
機器人的底盤裝有4個減速電機[4],底盤設計圖如圖3所示,地盤由底板和兩個凹槽組成,電機支架放置于底板4腳,前后左右四個方向有放置循跡傳感器的螺絲口。前部分圓柱形凹槽用于放置和固定云臺電機,凹槽設計圖如圖4所示,后部分T型凹槽用于集中和放置線材,電機驅動器和電池等元件。
抓取臂末端放置兩個舵機,如圖5所示,分別控制爪子和OpenVMS抬起與平放,以及爪子的打開與抓取。通過爪子的抬起能夠使OpenVMS識別前方或爪子底部的畫面,減少視覺盲區,增加識別準確性。
2.2? 機器人電路設計
該控制系統硬件電路結構如圖6所示,機器人通過4組安裝在底盤四周的灰度傳感器進行空間范圍的位置識別,實現定位效果,并對地面十字形交叉的黑線進行精確檢測,在交叉路口進行計數與定位,同時配合陀螺儀進行行走矯正和位置反饋。搬運任務信息和物料顏色信息由OpenVMS主板配合其攝像頭進行數據采集并發送到主控芯片。主控芯片對信息進一步運算處理并將采集到信息顯示到OLED屏幕。
系統主控MCU部分采用了STM32F407VGT6單片機主控模塊作下位機控制器,其在性能上可以滿足各類機器人豐富的功能需求,因此本文中采用STM32F4作為機器人系統的主控模塊。
本控制系統采用5路灰度循跡傳感器。本工廠模擬圖為縱橫交錯的黑色線條,將場地等分為若干相同規格的小格,因此可以通過機器人行駛至交叉黑線處進行計數,將數據作為位置判斷,從而得到機器人當前位置,并使其能夠沿黑線進行循跡行走。
由于需要進一步矯正機器人的角度,提高擺放物料的準確度,采用JY62陀螺儀得到機器人的航向角,如圖7所示,從而對位置進行反饋。當擺放物料時,由于底部摩擦力不均勻,機器人總會出現傾斜,可通過陀螺儀反饋的航向角來對底部電機進行操控,直到航向角達到我們想要的角度,從而消除機器人傾斜的問題。
本系統采用RobotMaster M2006動力系統作為機器人的底部驅動動力系統和絲桿驅動動力系統,其減速比、輸出端最高轉速、最大持續扭矩、最大持續輸出功率等參數都較為理想,確保能長時間帶動機器人行走。除了RobotMaster M2006動力系統以外,采用GM6020電機作為云臺動力系統,RoboMaster GM6020是一款內部集成驅動器的高性能直流無刷電機,電機采用空心軸設計,同樣具有速度傳感器和位置傳感器,可以對其速度和位置雙環控制,提高云臺轉動的速度和精確度。
2.3? 機器人控制系統設計
搬運機器人的控制系統采用基于C語言開發的Keil MDK編寫。在整個智能化的識別以及物料搬運過程中,機器人運行路徑的標準選擇方式有許多不同的排列組合,因此搬運機器人就需要通過調試和優化代碼設計出最佳的運動狀態和行走路徑。
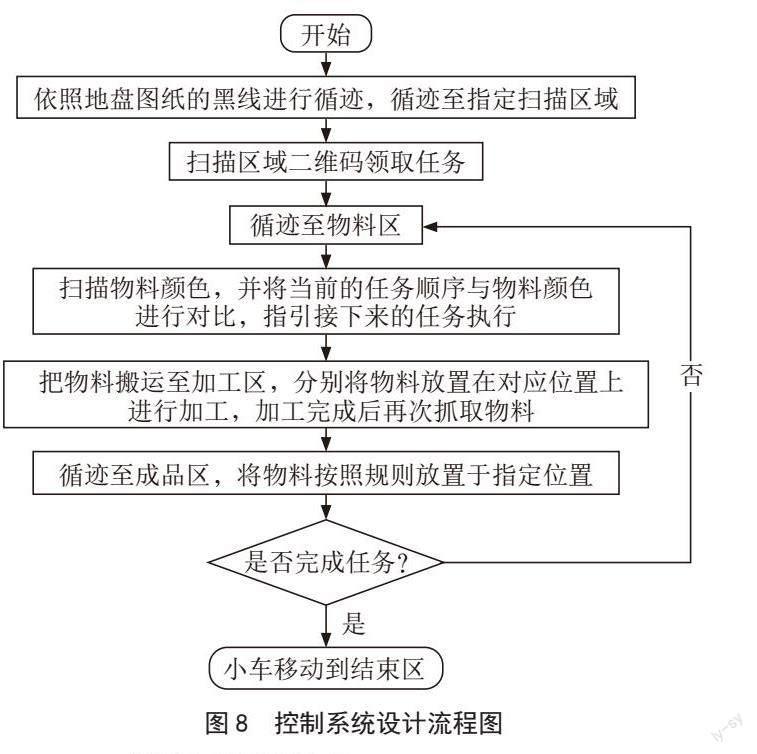
在進行多次實驗后,我們發現控制系統遇到的問題有:工作中會因為車身負載、地面摩擦、地板循跡圖紙磨損等環境因素造成的機器人偶有偏移,為了助機器人進行方位的修正,我們引入陀螺儀動態檢測。由于在實際中出現任務安排時間過長或過短而導致的高度位置偏差,所以在程序中添加了延時函數進行了緩沖。由于舵機偶有因為電壓不穩定而導致不理想的狀態,那么為了改善我們添加了穩壓模塊。最后電機控制在實際調試中經過不斷修正Kp、Ki和Kd參數,達到了一個平衡、高效的閉環控制,代碼設計具體流程如圖8 所示。
2.4? 視覺檢測系統設計
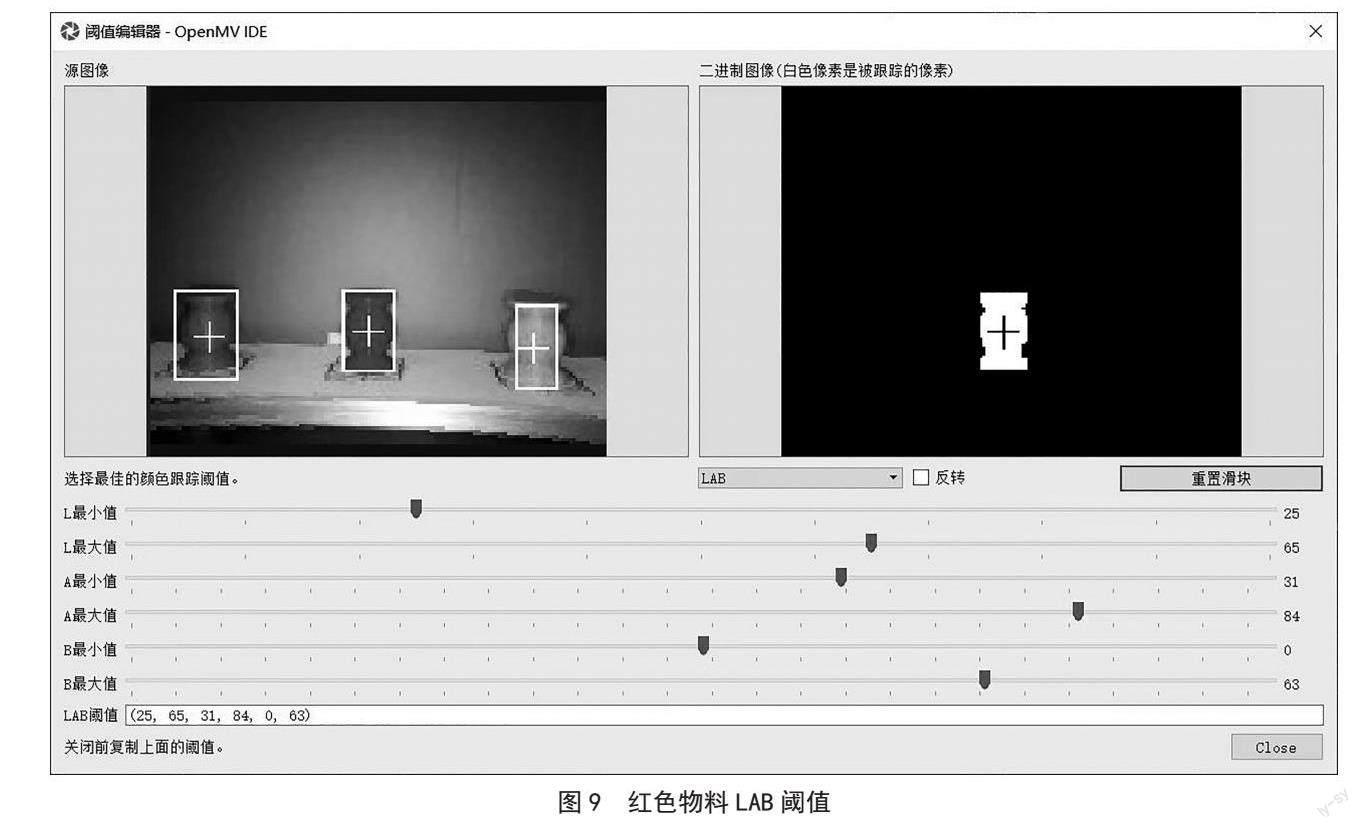
機器人視覺采用OpenVMS模塊進行識別,可以掃描二維碼以及尋找色塊進行排序[5],現在,最為常用的是CIE Lab色空間。我們在對兩個顏色進行比較時,就可以通過這兩個顏色的Lab差值來判斷它們之間的色差。通過修改獲取的LAB閾值就可以識別到想要的目標顏色。調整紅色物料LAB閾值使得識別紅色物料,如圖9所示。
通過OpenVMS庫函數image.find_blobs()返回色塊對象,獲取目標之后比較blob.x()中各色塊在幀緩沖區x的坐標,判斷色塊位置,通過串口將數據打包為數組,發送給STM32。如顏色順序從左到右為紅、綠、藍,則發送[1, 2, 3]。
3? 測試分析
3.1? 二維碼識別情況
相機找到QR二維碼后采用紅色框線定位,輸出即二維碼的內容。內容的格式均為“XXX+XXX”的形式,其中X代表數字1、2、3中的任意一個,例如二維碼信息“132+231”,代表規定的機械臂抓取不同顏色物料的順序。1、2、3分別代表紅色、綠色和藍色。數字的排序代表著抓取的順序。
3.2? 顏色識別情況
相機識別到紅、綠、藍色塊后,分別使用1、2、3代替以上三種顏色,并按照上層+下層,從左至右的順序,輸出不同位置的色塊顏色情況。顏色識別同樣采用“XXX+XXX”的形式。例如,上層從左至右為:紅、綠、藍,下層從左至右為:藍、紅、綠,則輸出“123+312”,這代表了物料實際擺放的順序。
3.3? 任務完成情況
小車掃描二維碼領取搬運任務,在指定的工業場景內行走,運行的位置精度達到±0.5 cm。在規定地方出發后來到指定的二維碼放置區進行二維碼識別從而得到任務信息,接著小車行駛到物料擺放區域進行物料顏色識別,得到物料擺放信息后,將任務要求和物料的具體擺放位置信息進行信息處理后讓小車將物料按順序抓取。抓取精度為:±1 cm,小車會首先將物料按照任務順序擺放到粗加工區,全部擺放完成后再將物料按順序進行抓取,然后再行駛到成品區將物料進行最后的擺放,接著返回物料區進行二層抓取,流程同第一層大概一致,只是最后在成品區時采用堆垛的方式進行擺放。擺放精度為:±1.5 cm。機器人運行情況匯總如表1所示。
4? 結? 論
本文順應物料分揀搬運的智能化、自動化的時代潮流與發展前景,設計研發了一款基于STM32單片機的智能物料搬運機器人,可以實現在短時間內完成物料的識別、指定物料的搬運等工作任務,其具有高效率、高質量、高準確率的優點,同時提高物流搬運行業的效率與精度,降低生產成本。因此本項目所設計的基于STM32的智能物料搬運系統能夠為機器人在智慧物流加工行業的實際應用提供便利。
參考文獻:
[1] 林兆花,徐天亮.機器人技術在物流業中的應用 [J].物流技術,2012,31(13):42-45.
[2] 邊述華,吳年祥.基于智能機器人的運動軌跡實驗綜述 [J].安慶師范學院學報:自然科學版,2013,19(2):57-60.
[3] 金琦淳,任俊,袁明新,等.復雜競賽任務中的自動分揀搬運機器人系統設計 [J].輕工機械,2019,37(2):17-23+28.
[4] 陳博翁,范傳康,賀驥.基于麥克納姆輪的全方位移動平臺關鍵技術研究 [J].東方電氣評論,2013,27(4):7-11.
[5] 曾梓浩.工業機器人視覺抓取系統及圖像時延補償的研究 [D].合肥:合肥工業大學,2018.
作者簡介:楊旭(1989—),男,漢族,吉林琿春人,工程師,碩士研究生,研究方向:實驗室設備管理;季嫣然(2002—),女,漢族,山東菏澤人,本科在讀,研究方向:視覺檢測;郭守娜(2002—),女,漢族,廣東汕頭人,本科在讀,研究方向:自動控制;林希寧(1986—),男,漢族,廣東湛江人,實驗師,碩士研究生,研究方向:工業機器人技術應用研究。
