
不同農機駕駛方式對玉米播種出苗率的影響*
——基于無人機多光譜影像的測算
2023-07-11 00:23:16徐嵐俊孫夢遙張傳帥王迪李傳友吳才聰
中國農機化學報 2023年6期
徐嵐俊,孫夢遙,張傳帥,王迪,李傳友,吳才聰
(1.北京市農業機械試驗鑒定推廣站,北京市,100079;2.北京科技創新促進中心,北京市,100142;3.中國農業大學,北京市,100083)
0 引言
無人機多光譜遙感技術具有覆蓋面積大、獲取信息效率高、監測精度高、操作便捷等優勢,在農作物生長信息分析領域已廣泛應用[1-2],特別在作物長勢監測、產量估測、作物病蟲害監測、作物植株水分含量等方面研究應用較多[3-7]。陳成等[8]基于無人機遙感技術開展了玉米長勢的評價研究,通過光譜數據構建了玉米歸一化作物指數,實現了玉米長勢的高效便捷監測。盧闖等[9]利用無人機多光譜影像開展了春玉米田管理分區,利用吐絲期玉米無人機多光譜影像,基于多尺度分割與模糊聚類相結合方法,實現低成本高效的分區,為農田管理分區提供了參考方法。目前,獲取玉米出苗率的方法大致可分為人工實測、機械手點數、光電傳感和圖像識別 4 種。其中,運用無人機多光譜影像開展圖像識別技術獲得某一地塊作物數量來計算出苗率,覆蓋范圍廣,而且計算結果精確可靠,效率高。玉米幼苗期的株型結構適合垂直俯拍,玉米苗和雜草的形狀差異明顯。因此,無人機多光譜遙感技術用于大面積玉米出苗率測算具有較好的可行性和優勢。
大田農機作業發展趨勢由傳統人工作業發展到輔助駕駛作業,再到農機無人作業,但輔助駕駛作業和農機無人作業是未來發展趨勢,具有智能化、精準化、高效化、數字化等發展趨勢,對解決“無人種田”具有較大意義[10-12]。近幾年,新疆、黑龍江、上海、北京等地開展了農機無人農場建設和農機無人化作業試驗示范工作,驗證了農機無人作業的可行性和發展優勢[13-14]。隨著農機無人駕駛技術在各類農業作物不同環節試驗應用,國內外很多學者開展了無人駕駛、輔助駕駛、人工駕駛的作業效率、作業成本、作業質量的分析和研究[15]。無人駕駛、輔助駕駛技術逐漸成熟,在玉米等大田作物種植領域的優勢逐漸凸顯。
為驗證無人駕駛、輔助駕駛和人工駕駛對玉米播種出苗率的影響,本文擬以鮮食玉米為試驗作物,采用基于無人機多光譜影像的測算模型方法,在配套相同的播種機具、種植條件和管理水平的基礎上,對玉米出苗情況進行分析,為無人駕駛、輔助駕駛替代人工駕駛開展玉米播種的可行性提供依據。
1 材料和方法
1.1 試驗區概況
試驗地點位于北京市密云區河南寨鎮陳各莊村,面積30.47 hm2,試驗地屬于暖溫帶半濕潤氣候,年均氣溫9 ℃左右,無霜期170 d,年均降雨量608 mm,年均日照時數2 801 h。選取典型地塊作為研究區(圖1),其中無人駕駛、輔助駕駛、人工駕駛區域分別為1.67 hm2、1.80 hm2、1.93 hm2。各分區種植作物均為鮮食玉米,品種選用農科糯336,千粒重394.7 g,播種時間為2022年6月30日,種植行距60 cm,株距32 cm,播種密度51 000~52 599粒/hm2。施肥情況為450 kg/hm2緩釋肥,其他管理無差異。無人駕駛區域采用2204無級變速無人駕駛拖拉機作為動力機械,輔助駕駛區域采用搭載自動駕駛系統的2204拖拉機作為動力機械,人工駕駛區域采用25年駕齡的機手駕駛2204拖拉機作業,播種機具均為6行玉米播種機。無人機圖像采集時間為2022年7月28日、29日。
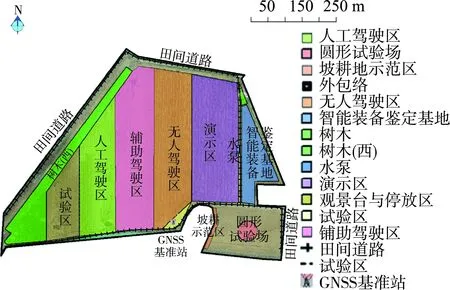
圖1 試驗區域劃分Fig.1 Division of test area
1.2 無人機影像數據采集與預處理
無人機平臺采用大疆經緯系列M300無人機,搭載禪思P1可見光鏡頭,包括藍綠紅3個波段,主要采集玉米真彩色影像。傳感器照片尺寸為35.9 mm×24 mm(全畫幅),傳感器視頻尺寸為34 mm×19 mm,有效像素為4 500萬,像元大小為4.4 μm。大疆精靈4多光譜版無人機,包括藍綠紅、紅邊、近紅外5個波段,主要采集玉米多光譜影像,影像傳感器配置為6個1/2.9英寸CMOS,包括1個用于可見光成像的彩色傳感器和5個用于多光譜成像的單色傳感器,單個傳感器有效像素208萬。兩種無人機RTK定位精度均為1 cm+1 ppm(水平)、1.5 cm+1 ppm(垂直)。無人機參數設置應綜合考慮研究目的、測區情況及無人機自身性能。航向重疊度與旁向重疊度越高,影像拼接效果越好,但高度重疊會造成影像數據量大、拼接費時、電腦硬件要求高等問題。本文設計航向80%、旁向70%的重疊率,其中出苗期無人機飛行高度為80 m,影像的分辨率是5 cm。由于飛行速度過快易造成地物影像模糊,本文設定無人機航速為10 m/s,傳感器鏡頭垂直向下,拼接影像涵蓋整個研究區。研究區為大面積玉米種植區,區內典型地物相對較少,為方便后期影像幾何校正處理,于測區內均勻布設5個航測標志點,作為典型參考點。航拍前均在地面放置一塊校準反射面板,每個架次起飛前,手動控制飛機懸停于校正板上方2.5 m處拍照,獲得當時條件下標準反射率值。
獲取無人機影像后,采用大疆智圖軟件進行拼接,在影像處理過程中利用飛行前獲得的校準反射面板數據校正所有航拍影像。使用ENVI 5.3軟件,以研究區數碼正射影像為參考影像,全區均勻選取15個參考點(包括5個航測標志點)對多光譜影像進行幾何校正,檢驗圖像幾何糾正誤差小于2個像元。根據地面實測數據點在影像上的位置,構建樣本點的感興趣區域(Region of Interest,ROI),以ROI范圍內平均反射率光譜值作為該點的玉米反射率光譜,以此得到各樣點反射率光譜數據。無人機玉米密集度空間分布如圖2所示。
1.3 試驗方法
1.3.1 玉米苗識別與提取
利用二值化模型,對多光譜影像進行玉米苗特征點解譯,基于確定的特征點,利用超綠值(ExG)和最大類間差法相結合的方法從農田背景中提取玉米苗。獲取的玉米苗原始多光譜圖像如圖3所示,玉米苗識別與提取處理后的圖像如圖4所示。

圖3 玉米苗原始多光譜圖像Fig.3 Original multispectral images of maize seedlings
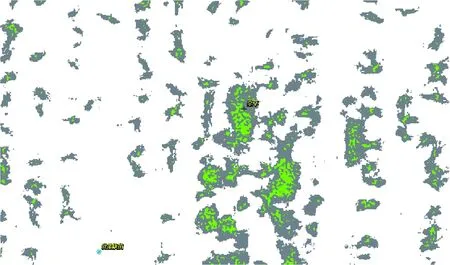
圖4 玉米苗識別與提取Fig.4 Identification and extraction of maize seedlings
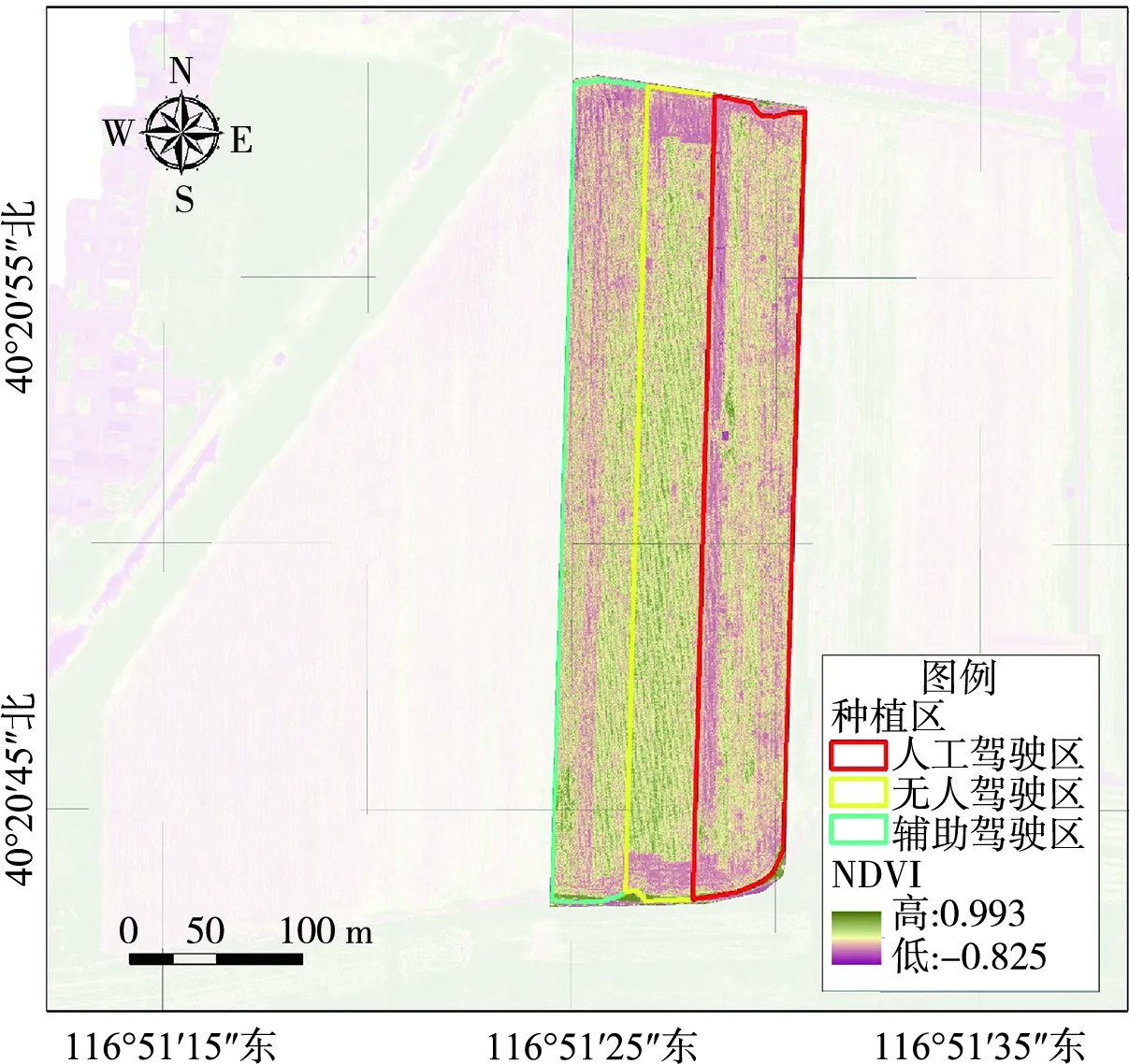
圖5 重點分析區NDVI示意圖Fig.5 NDVI schematic diagram of key analysis area
基于無人機多光譜影像,利用二值化模式進行玉米苗特征點解譯,通過機器學習訓練該特征點,可增加特征點識別的準確性。
1.3.2 植被指數計算
在經常用于精準農業的各種植被指數中,歸一化植被指數(NDVI)是應用最為廣泛的一種。NDVI對植被信息極為敏感,能夠區分植被和裸土。試驗區只有玉米苗和裸土,所以選擇NDVI進行玉米苗覆蓋度的計算。
式中:BandNIR——地物在近紅外波段的反射率;
Bandred——地物在紅光波段的反射率。
負值主要是因水體信息產生,接近零的值則主要由于巖石和裸土而產生,正值表示有植被覆蓋,且隨覆蓋度增大而增大。
1.3.3 實測數據處理
實地采集數據過程中,在田間5個點位,測量在垂直于壟方向30 m范圍內的壟數,并計算平均壟數。隨機選定樣壟,抽取此壟10 m范圍,記錄已露出土壤的苗數。
基于空間定位技術,將實地采集的玉米苗數據進行空間化。本次實測數據采集共設計樣條15個,規格統一為10 m×0.6 m。其中,三個區域內各取樣條5個。空間化過程中為每一個樣條分配唯一編號,樣條分布如圖6示。

圖6 玉米田實測樣條示意圖Fig.6 Schematic diagram of measured spline in maize field
2 結果與分析
2.1 實測出苗率計算
人工駕駛區、輔助駕駛區、無人駕駛區設置播種密度相同,種植49壟,寬度30 m。分別計算每個樣方的粒數和出苗率,對于每個樣條的播種粒數,假設整個區域播種均勻,每個樣條內所播種的玉米種數均相同。樣條玉米出苗率統計結果如表1所示。
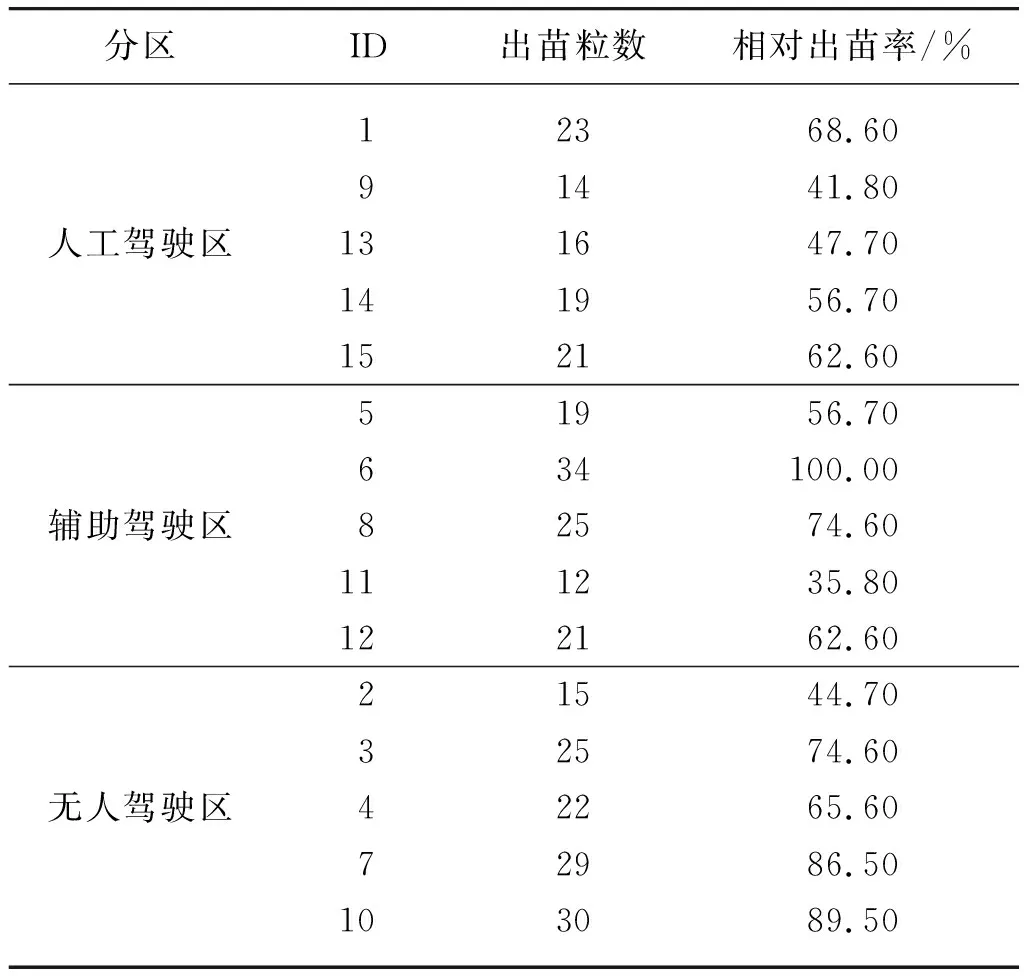
表1 樣條玉米出苗率統計Tab.1 Statistical table of seedling emergence rate of spline corn
2.2 區域出苗率計算與對比
使用無人機采集出苗期多光譜影像,使用超綠值(ExG)和最大類間差法相結合的方法提取農田背景中玉米苗特征圖像,計算歸一化植被指數(NDVI),基于實測計算的出苗率與區域NDVI,建立對應關系,利用空間分析技術計算無人駕駛、輔助駕駛、人工駕駛方式下出苗率情況。
基于無人機多光譜影像的玉米出苗率分布如圖7所示。

圖7 基于無人機多光譜影像的玉米出苗率分布Fig.7 Distribution of maize emergence rate based on UAV multispectral image
基于無人機多光譜影像測算方法的無人駕駛、輔助駕駛、人工駕駛播種出苗率分別為67.47%、66.30%、52.83%,實測出苗率分別為72.19%、66.23%、55.49%,差異度分別為-4.72%、0.07%、-2.66%,出苗率為無人駕駛區>輔助駕駛區>人工駕駛區,無人駕駛區出苗率最高,且出苗率較為均勻,如表2所示。
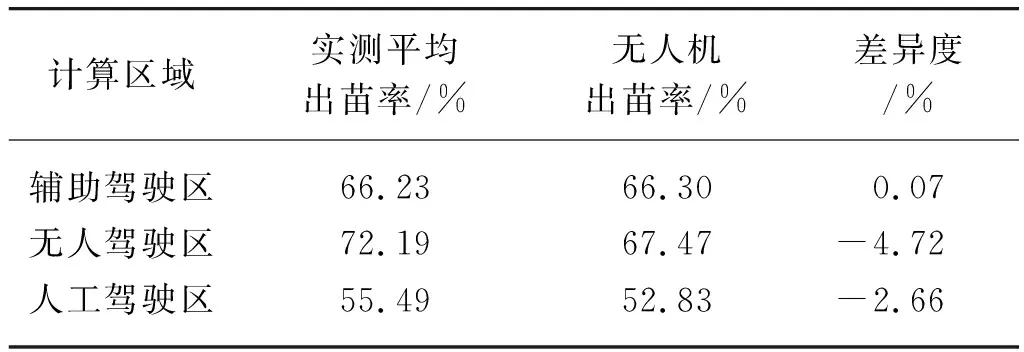
表2 玉米出苗率統計表Tab.2 Statistics of maize emergence rate
從差異度來看,無人駕駛區>人工駕駛區>輔助駕駛區,無人駕駛區遙感計算結果與實測結果差異較大,通過空間數據分析發現,生長異常區對整個區域的出苗率估算有較為明顯的影響,然而并未對該區域進行樣本采集與統計,因此導致二者差異度相對較大。在去除地塊土壤差異等異常因素外,基于無人機多光譜影像的測算方法較為準確。
3 結論
1) 從數據獲取途徑和表達范圍來看,無人機多光譜遙感數據更能全面、客觀地反映出玉米出苗整體區域的狀況。基于出苗期無人機多光譜影像,使用超綠值(ExG)和最大類間差法相結合的方法提取農田背景中玉米苗圖像,計算歸一化植被指數(NDVI),基于實測計算的出苗率與區域NDVI,建立對應關系,對玉米出苗率的計算方法可靠。相對傳統測算方式,采用無人機多光譜影像對玉米播種率進行測算,具有工作效率高、準確率高、覆蓋范圍大等明顯優勢。
2) 整體來看,基于無人機多光譜影像測算方法的無人駕駛、輔助駕駛、人工駕駛播種出苗率分別為67.47%、66.30%、52.83%,實測出苗率分別為72.19%、66.23%、55.49%,均表現為無人駕駛區和輔助駕駛區出苗率高于人工駕駛區,并且無人駕駛區出苗率更均勻,說明無人駕駛和輔助駕駛方式借助信息化、智能化技術,消除了部分人工駕駛導致的誤差,并且勞動強度、操作便捷性均有明顯提高,對于提升產量和后期的田間管理也有較大意義。農機無人駕駛方式在玉米播種環節中作業質量明顯高于輔助駕駛和人工駕駛方式,具有較好的推廣應用可行性。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
