變結構氣動軟體機械手的設計及試驗研究
2023-07-27 08:23:44付敏王成夢郝鎰林高澤飛陳效慶
機床與液壓 2023年13期
關鍵詞:結構
付敏,王成夢,郝鎰林,高澤飛,陳效慶
(東北林業大學機電工程學院,黑龍江哈爾濱 150040)
0 前言
機械手是機器人的重要組成部分[1],傳統的剛性機械手在執行一些抓取任務時容易對物體的表面造成損傷,缺乏環境適應性和交互安全性[2-3]。和剛性機械手相比,軟體機械手由柔性材料制成,擁有更多的自由度,對柔軟、易碎和形狀不規則的物體有著顯著的抓取優勢[4],具有更好的環境適應能力[5-6],目前已成為研究熱點。
華超等人[7]設計了一種四指軟體水果采摘機械手,軟體手指由法蘭盤進行固定,在正負壓驅動下,手指可向內、外兩個方向彎曲,可穩定抓取蘋果、梨等中小型球形水果。田德寶等[8]設計了一種變腔室氣動軟體機械手,通過改變腔室結構增強了軟體機械手的夾持力。魏樹軍等[9]采用硅橡膠材料制作出一種基于纖維增強型軟體抓手,可連接到機械臂上實現對物品的抓取。李康等人[10]提出了一種多功能柔性三指機械手,能夠實現抓、握、鉤3種抓握模式,增加了機械手的靈活性。HAO 等[11]設計了一種手指有效長度可調的四指軟體機械手,具有內、外兩種彎曲形式,能夠抓取多種物體。JIANG 、XU[12]制作了一種氣動可調節抓取直徑的軟體抓手,可應用于果蔬采摘。
軟體機械手可主動適應物體的大小和形狀來完成抓取動作[13-14],能有效提高易損物體的操作安全[15],但是在某些應用場景下因負載能力低、抓取穩定性差等原因難以滿足實際需求。本文作者面向形狀、大小及軟硬度不同物體的抓取需求,設計了一種變結構的氣動軟體機械手;建立了手指的單腔室彎曲數學模型,通過有限元分析建立充氣壓力與彎曲角的關系曲線以優化手指的結構參數;對軟體手指彎曲效果進行測試,通過軟體機械手抓取試驗,驗證了方案的可行性。
1 變結構氣動軟體機械手設計
1.1 整體結構設計
為增強軟體機械手的抓取穩定性,本文作者設計了一種可變結構的氣動軟體機械手,結構示意見圖1。機械手由軟體手指、手掌、手臂及驅動電機等組成,手指通過連接件和手臂連接,驅動電機分別固定在相應的位置。機械手可實現對不同形狀、大小及軟硬度物體的穩定無損抓取。
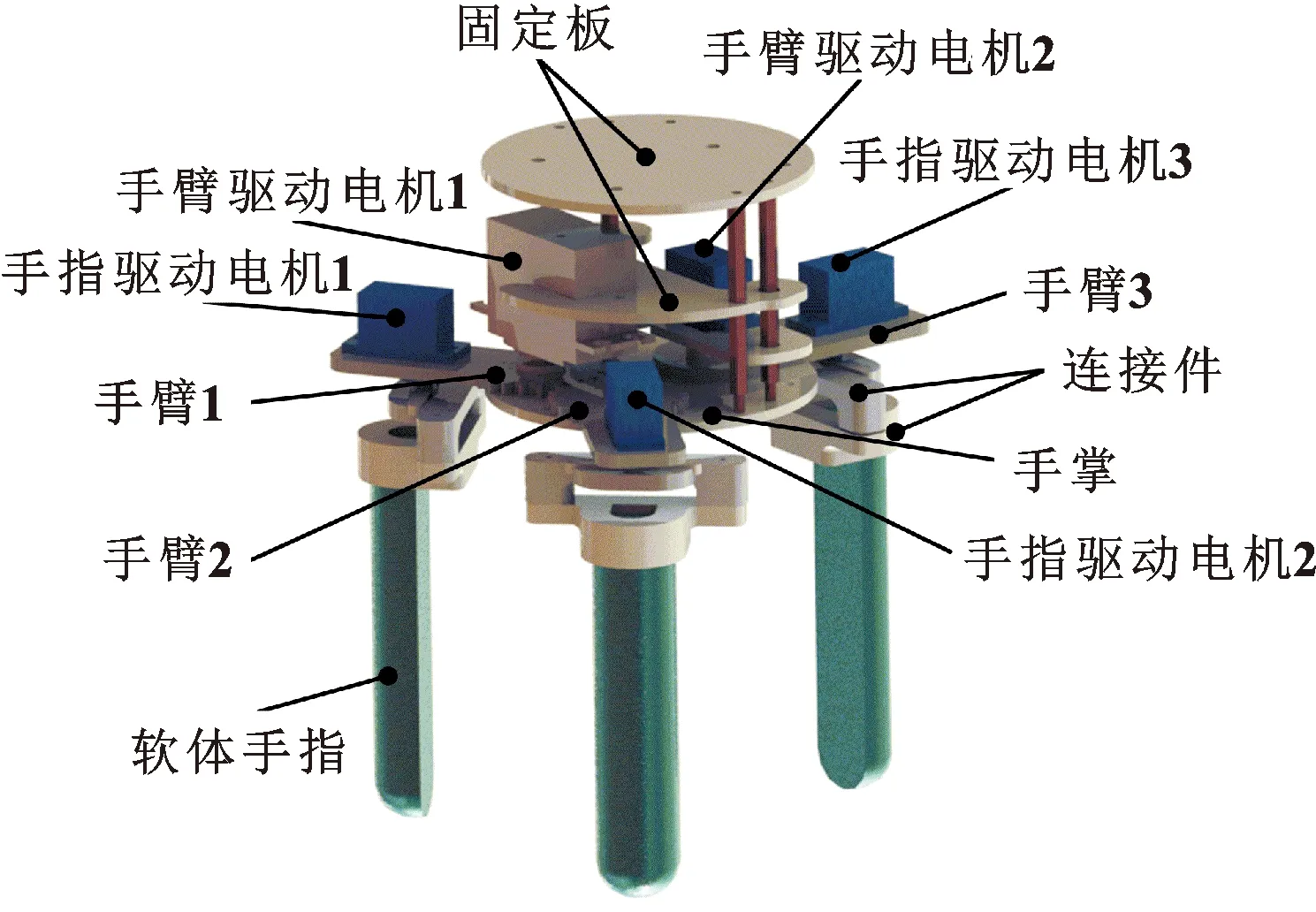
圖1 機械手結構示意
1.2 轉換機構設計
手掌和3個手臂組成軟體機械手的轉換機構,如圖2所示。手掌為圓盤形結構,沿手掌圓周均布安裝3個手臂,每個手臂上安裝1根手指,當手臂和手指旋轉時,可改變手指的抓取點位置。轉換機構共有6個自由度(見圖3),R1~R6為轉換機構的6個旋轉副。在手臂驅動電機1的驅動下,通過齒輪嚙合機構,可使手臂1和手臂2同時轉動,轉動副R1和R2的旋轉角分別為α1和α3,α1和α3的取值范圍為20°~60°;在手臂驅動電機2的驅動下,可使旋轉副R3旋轉以改變手臂3的初始位置,形成的旋轉角為α2,α2的取值范圍為30°~120°;同時,可分別獨立控制3個手指驅動電機使R4、R5、R6轉動,3根軟體手指轉動形成的旋轉角為δ1、δ2及δ3,δ1、δ2和δ3的取值范圍為30°~120°。
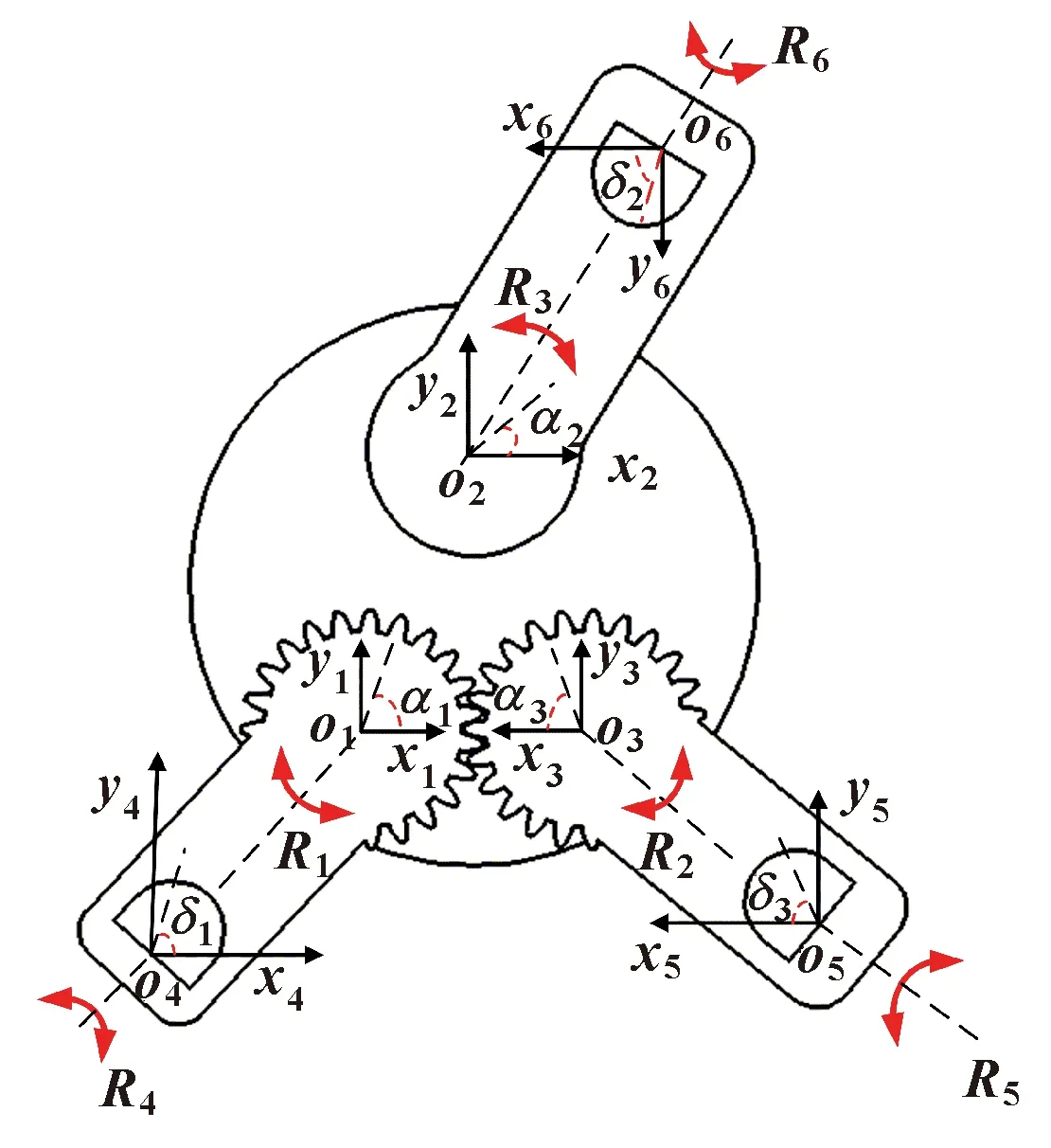
圖3 轉換機構自由度
軟體機械手可實現4種抓取模式(見圖4),外圓周抓取適于圓形、球形物體;內圓周抓取適于具有較深凹槽的物體和環狀物體;二指平行抓取適于方形物體;三指平行抓取適于具有細長形狀特征的物體。轉換機構根據物體的形狀調整6個旋轉副進行構型變換,從而改變手臂和手指的位置,完成抓取模式的切換,使機械手能夠在最佳的位置對物體進行抓取。
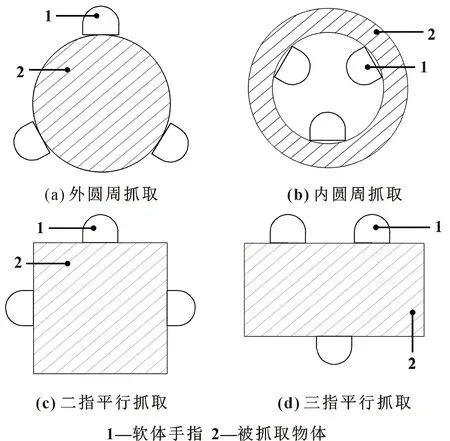
圖4 抓取模式示意
1.3 軟體手指結構設計
設計的軟體手指為多腔室結構,如圖5所示,采用SHOREA20硬度硅膠作為軟體手指的制作材料。每個軟體手指分別由應變層、不可拉伸層、限制層三部分組成。氣體由氣道進入腔室時,軟體手指可產生彎曲變形;手指根部的固定層用于安裝,指尖處的腔室壁厚大于其他腔室,使指尖處剛度比手指的其他部分更好,有助于指尖觸摸和抓取物體;指根的端面設置有通氣孔,通氣孔與氣道相連通。
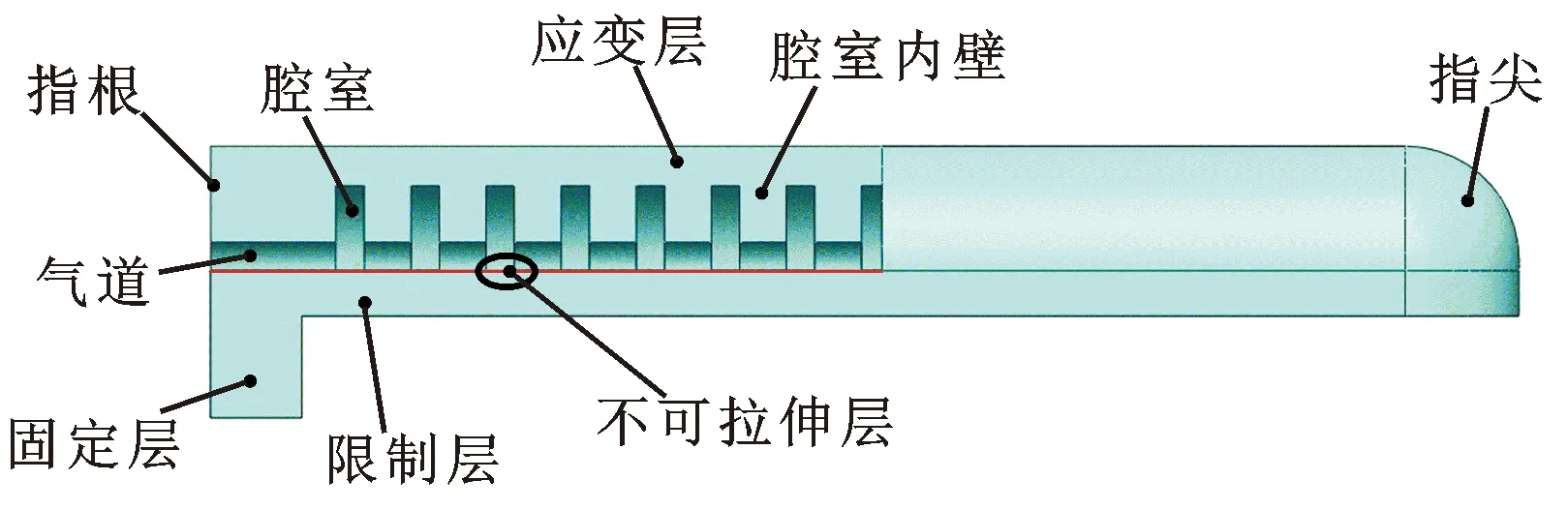
圖5 軟體手指結構
2 軟體手指理論數學模型的建立
2.1 軟體手指尺寸參數設計
軟體手指剖面圖如圖6所示,圖中L1為手指的總長;L2為固定層的厚度;L3為單個腔室的長度;L4為單個腔室的壁厚;H1為應變層厚度;H2為固定層高度;R為腔室的外半徑;r為腔室的內徑;r1為氣道半徑。根據多腔室軟體手指在不同結構參數下輸入氣壓與彎曲角度的數學關系模型[16],本文作者確定軟體手指的總長度L1為128 mm,外半徑R為13 mm,具體尺寸參數見表1。

表1 軟體手指結構參數
圖6 軟體手指剖面圖
2.2 分段常曲率模型
采用分段常曲率法[17]來求解軟體手指彎曲角度和輸入氣壓之間的關系,以分析各數值對軟體手指彎曲性能的影響。
軟體手指彎曲變形的簡化模型如圖7所示,手指的彎曲可以看作是各個獨立腔室彎曲后的圓弧段連接而成。定義單個腔室的彎曲角為θ,軟體手指變形后的總彎曲角為ω。所有腔室內部的氣壓相同則彎曲角也相同,假設腔室的個數為N,總彎曲角為
圖7 軟體手指彎曲變形簡化模型
ω=Nθ
(1)
式中:N為腔室的個數。
假設軟體手指彎曲時不受任何力的作用,根據虛功原理[18]可知氣壓p所做的功完全轉化為軟體手指彎曲后所儲存的應變能。
針對單個腔室即有:
pdV1=V2dW
(2)
V1=V3-V2
(3)
式中:V1為單個腔室的空腔體積;V2為單個腔室彎曲變形后硅膠材料體積;V3為單個腔室總體積(硅膠體積+空腔室體積);W為應變能。
硅膠材料變形前后材料體積相同,圖8為單個腔室的結構參數示意,由幾何關系可知:
圖8 單腔室結構參數
(4)
2RH1(L3+2L4)
(5)
式中:R為腔室外半徑;L3為腔室長度;L4為腔室的壁厚;r為腔室內徑;r1為氣道半徑;H1為限制層厚度。
當腔室彎曲到一定角度θ時:
(6)
式中:λ為單個腔室軸向長度伸長比。
由文獻[19]可知,單個腔室軸向長度方向的主伸長比為
(7)
式中:Rθ表示腔室微小單元變形后對應的弧長。
將式(2)對θ求導,得到單個腔室彎曲角度和氣壓之間的表達式為
(8)
式(8)中僅含p和θ兩個未知變量,通過確定軟體手指的單腔室彎曲角度θ,便可求出所需氣壓p。由式(8)可知軟體手指彎曲角度與氣壓p、限制層厚度H1、腔室外徑R、腔室內徑r、腔室長度L3、腔室壁厚L4有關。由于r1為氣道半徑數值較小,對彎曲角度的影響可以忽略。通過查閱文獻已確定H1、R、L3以及r1的數值,則軟體手指可優化的結構參數為腔室內徑r和腔室壁厚L4。
首先在相同氣壓下,保持其他參數不變,改變應腔室壁厚L4的數值,根據式(8)可求得L4對軟體手指彎曲性能的影響,結果如圖9所示。同理,可求得r對軟體手指彎曲性能的影響,結果如圖10所示。
圖9 腔室壁厚對彎曲性能的影響
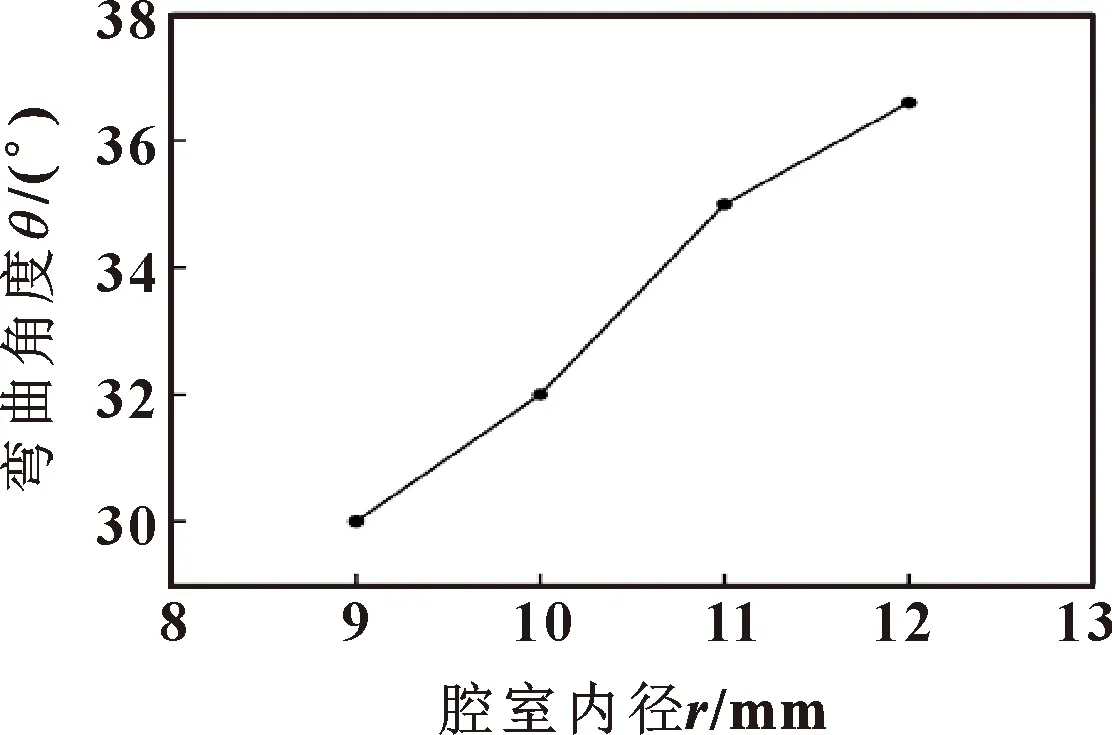
圖10 腔室內徑對彎曲性能的影響
可知:軟體手指的彎曲角度θ隨腔室壁厚L4的增大而減小,隨腔室內徑r的增大而增大。
3 軟體手指有限元仿真分析
硅膠材料受力復雜,無法進行精確的動力學建模[20],可通過有限元仿真來分析硅膠材料的受力情況,從而對軟體手指的結構參數進行優化。Yeoh模型是分析硅膠變形問題優先選用的本構模型[21]。Yeoh模型的應變能密度函數表達式為
W=C10(I1-3)+C20(I1-3)2
(9)
其中:
(10)
式中:λ1、λ2、λ3為各方向上的主伸長比,無量綱。在對材料進行單軸拉伸實驗時,應力:
σ2=σ3=0
(11)
有:
(12)
聯立上式,可推導出硅膠材料的主應力σ1和主伸長比λ1之間的關系為
(13)
根據式(13)和文獻[22]中的實驗方法,確定材料參數C10=0.11、C20=0.02。
將軟體手指的三維模型導入ABAQUS軟件,輸入C10=0.11、C20=0.02,進行仿真分析。軟體手指在不同氣壓下的彎曲形態如圖11所示。可以看出:軟體手指彎曲角度隨著氣壓的增大而增大。

圖11 軟體手指彎曲仿真結果
對腔室壁厚為1.5、2.5、3.5 mm的軟體手指仿真分析,保持其他參數不變,3種壁厚的軟體手指彎曲特性仿真曲線如圖12所示。當腔室壁厚較小時,腔室的徑向膨脹不容易被約束,會造成軟體手指的破損;當壁厚較大時,則需更大氣壓使其彎曲變形,降低了軟體手指的靈敏度;當壁厚為2.5 mm時,彎曲效果較好,對氣壓的反應也比較迅速,在合適的氣壓內,軟體手指不會被損壞。
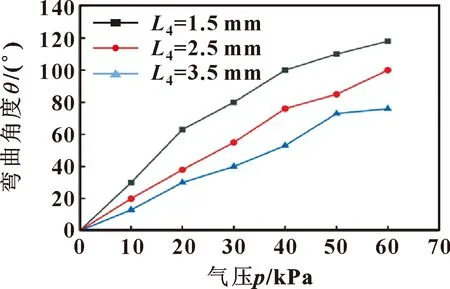
圖12 腔室壁厚對手指彎曲性能的影響
然后分別對腔室內徑為9、11、13 mm的軟體手指進行仿真,同時保持其他參數不變,仿真曲線如圖13所示。當氣壓較小時,半徑為9 mm的軟體手指彎曲不明顯,導致靈敏度降低;當半徑為13 mm時,較小氣壓就造成軟體手指過度彎曲,導致腔室產生氣球效應。
經過對兩個參數的仿真分析以及用硅膠材料多次制作嘗試,最終確定軟體手指的腔室壁厚為2.5 mm,腔室內徑為11 mm。
4 軟體手指的制備及試驗
4.1 軟體手指制備
軟體手指的澆注模具采用PLA(合成樹脂)材料,通過3D打印成型。模具示意見圖14。
軟體手指的制備過程如下:
(1)首先選用A、B兩種硅膠材料按質量等比例在容器中進行1∶1混合,用攪拌工具按照同一方向對兩種混合材料進行充分攪拌,并確保不混入雜質,之后用真空機抽取攪拌過程中產生的氣泡。
(2)在模具和硅膠接觸的表面均勻涂抹上一層脫模劑方便脫模,將預先準備好的無紡布放置于限制層模具底部,保證軟體手指的應變限制。之后將攪拌充分的液體硅膠分別緩慢導入應變層的底模和限制層模具中,澆注硅橡膠材料保持與模具上沿齊平,蓋上上模之后進行密封。為避免再次產生氣泡,上模設置有空隙可以排除多余的氣泡和硅膠,之后將其放在50 ℃的恒溫環境中靜置。
(3)靜置6 h后,將上模和底模具兩部分模具分開,將應變層和限制層分別從相應的模具中取出,之后再通過專門的黏合劑將兩部分粘合在一起,最后用硅橡膠材料對氣管通道部位做進一步加強處理,防止驅動單元在氣壓作用下出現漏氣狀況,即可得到軟體手指的實物。
4.2 軟體手指彎曲試驗
采用微型正壓泵對軟體手指充氣,使各個腔室膨脹驅動手指彎曲,通過比例閥調節氣壓,獲得不同氣壓下的彎曲形態。用坐標紙繪制出彎曲曲線,如圖15所示。氣壓50 kPa時彎曲角度已經大于70°,且軟體手指未破壞,驗證了軟體手指符合彎曲角度要求。
3種結果的對比見圖16,從實際試驗結果可以看出:在一定范圍內軟體手指彎曲角度隨著氣壓的增大而增大,軟體手指的彎曲效果較好。由于有限元仿真時未考慮軟體手指的自身質量,建立數學模型時假設其不受外力作用,所以有限元仿真結果、理論計算和試驗結果存在一定的誤差,但3條曲線的變化趨勢相同,試驗結果符合設計要求。
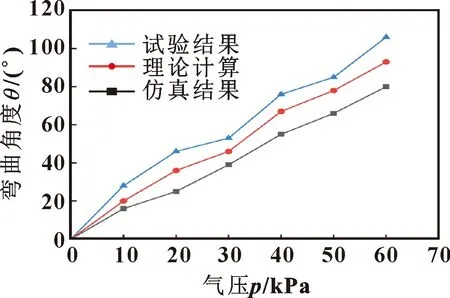
圖16 仿真、理論計算、試驗結果對比
為測量軟體手指輸入氣壓和末端輸出力的關系,利用推拉力計測量手指不同彎曲角度下(10°、20°、30°、40°、50°、60°、70°)的末端輸出力,如圖17所示。對3次測量結果求取平均值,試驗數據如表2所示。
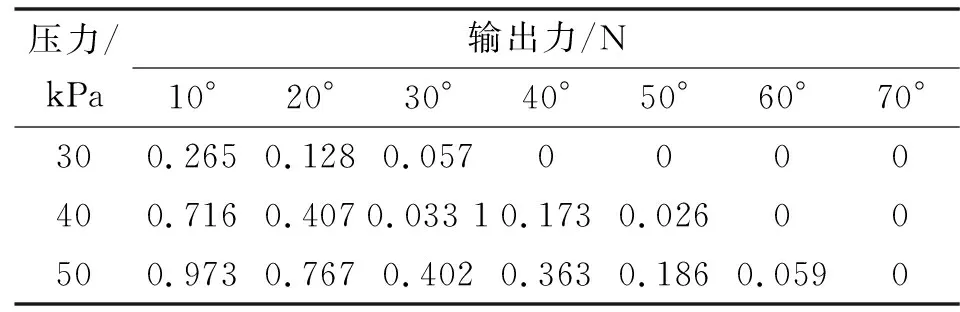
表2 軟體手指末端輸出力

圖17 軟體手指末端輸出力測試
該試驗結果表明:在壓力相等時,隨著彎曲變形加大,軟體手指末端輸出力逐漸變小;當彎曲變形相同時,隨著壓力的增大,軟體手指末端輸出力逐漸增大。
5 軟體機械手抓取試驗
軟體機械手裝配后的實物見圖18。首先組裝轉換機構,然后用連接件分別將3根軟體手指和轉換機構的手臂進行連接。采用四通將微型氣泵與3根軟體手指的氣道相連,以達到相同的氣壓,使3根手指的彎曲角度相同。
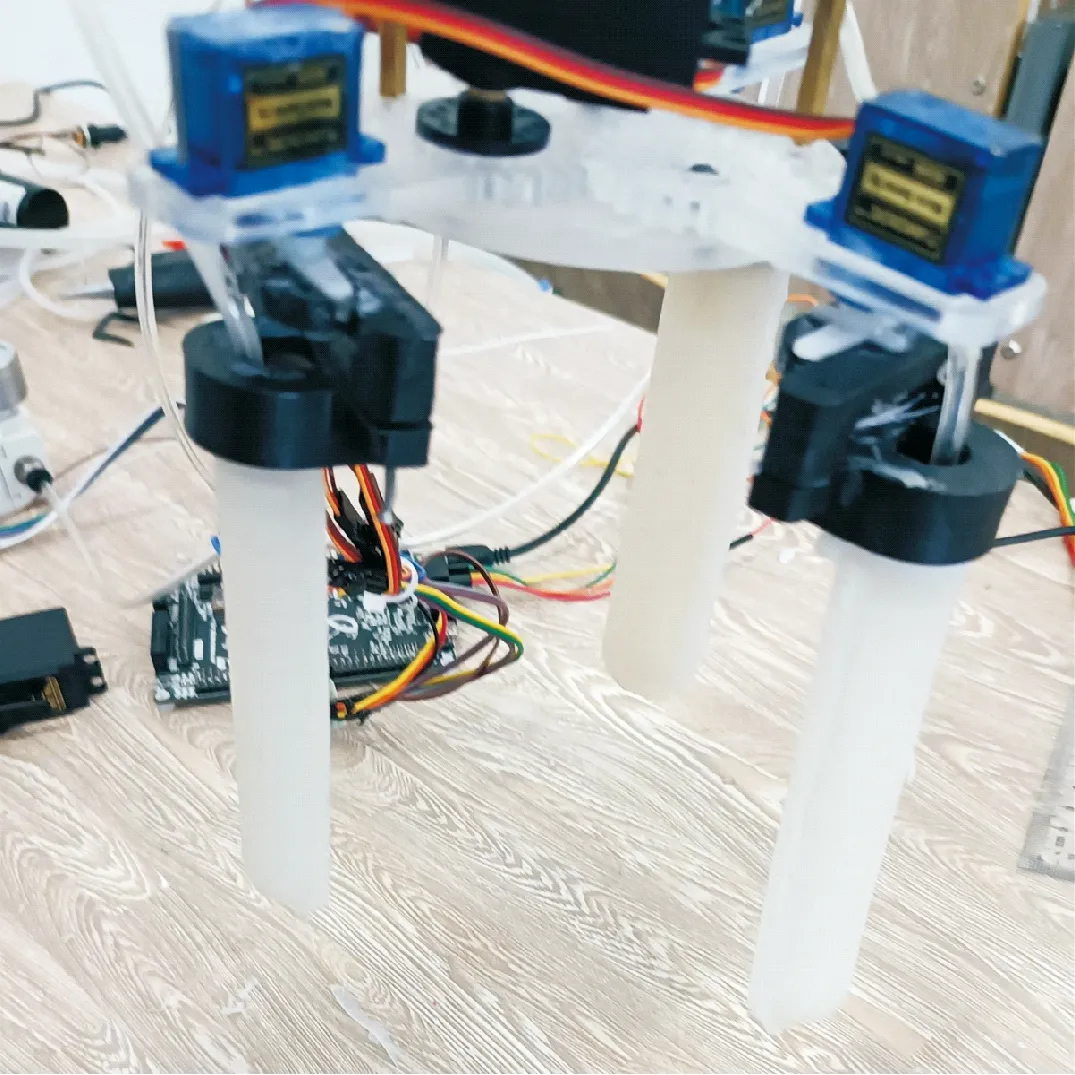
圖18 軟體機械手實物
利用STM32單片機控制5個驅動電機的轉動,改變轉換機構的6個自由度,使轉換機構進行構型變換;利用D/A轉換模塊控制比例閥的開合程度來調節氣壓,控制軟體手指的彎曲角度,實現軟體機械手的結構變換和物體抓取。
為測試變結構氣動軟體機械手的抓取效果,選擇8種不同的物體進行抓取試驗,如圖19所示。通過調節軟體手指的工作氣壓,配合4種抓取模式,8種物體均被穩定、無損抓取。被抓取物體的質量、抓取模式以及所需氣壓如表3所示。
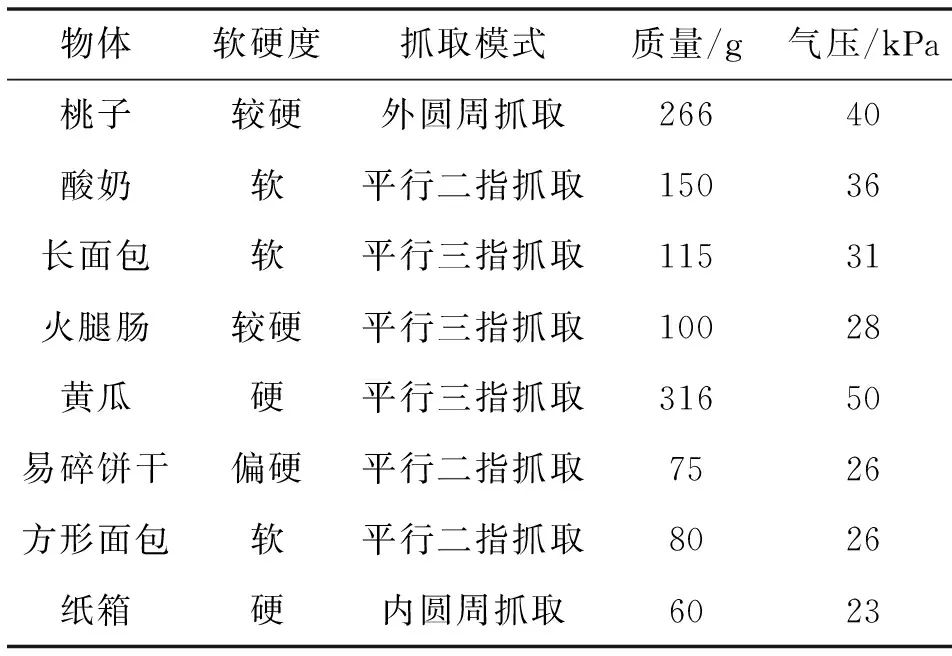
表3 抓取試驗所選物體的具體參數
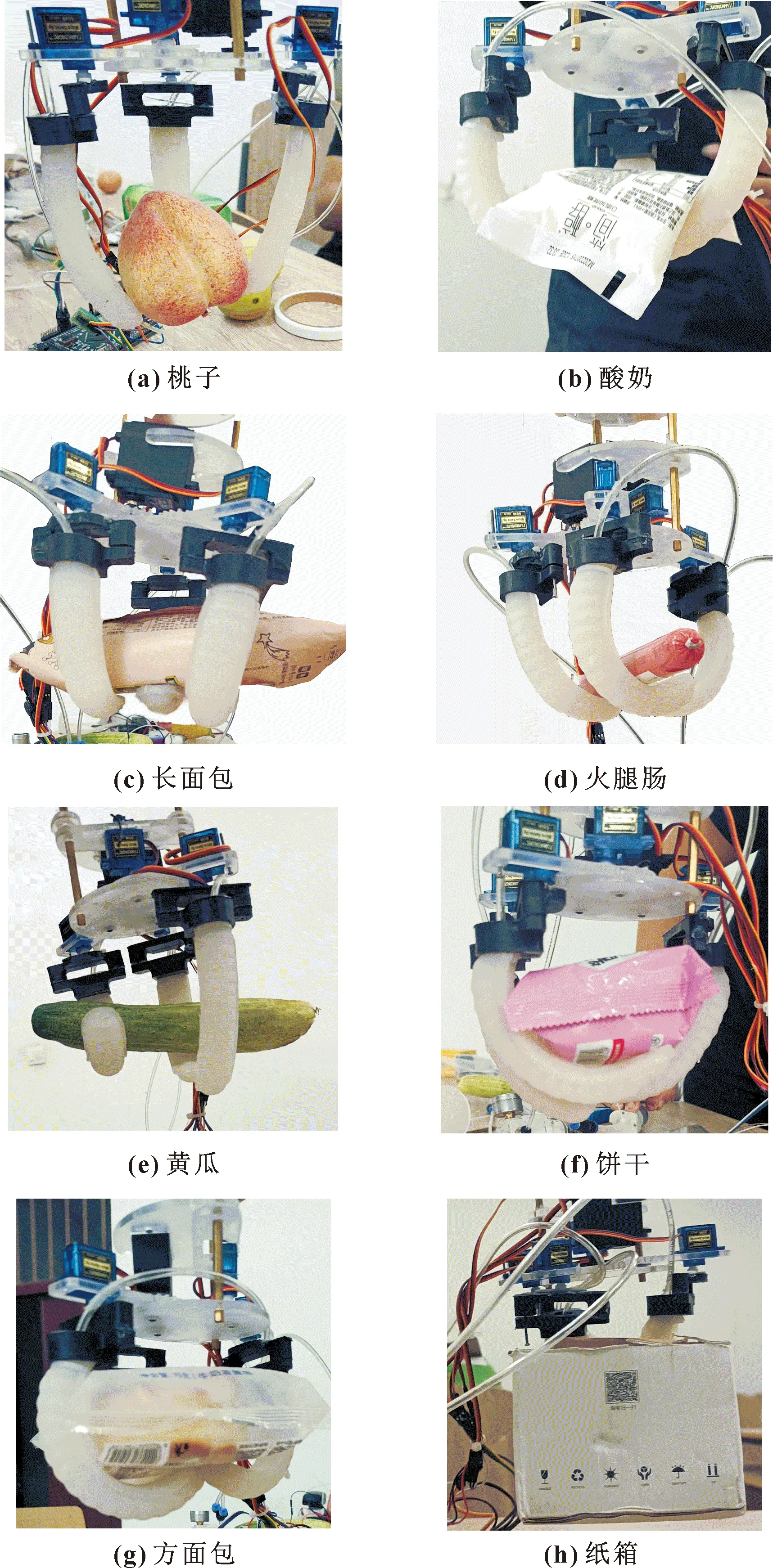
圖19 抓取試驗
試驗結果表明:變結構軟體機械手能夠穩定抓取不同形狀、大小及軟硬度的物體,具有較強的自適應性。
6 結論
設計一種可變結構的氣動軟體機械手,通過轉換機構帶動軟體手指的位置變換以主動適應物體形狀的方式,增加了對物體抓取的穩定性,擴大了抓取范圍。建立了針對單腔室的數學模型,對軟體手指進行有限元仿真,優化了手指的結構參數。通過軟體手指的彎曲試驗驗證了理論計算和有限元仿真分析的準確性以及軟體手指結構的合理性。最后,通過實物樣機對8種物體進行了抓取試驗。結果表明:所設計的變結構氣動軟體機械手可以穩定無損抓取在0~320 g內形狀、大小各異且軟硬度不同的物體,具有較強的自適應性。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
