下肢康復機器人訓練對腦卒中偏癱患者步行功能的影響
2023-08-29 08:56:47李京澤邢靖松呂福現劉福遷段好陽
機器人外科學 2023年6期
關鍵詞:腦卒中
李京澤 邢靖松 呂福現 劉福遷 段好陽
摘 要 目的:討論下肢康復機器人訓練對腦卒中偏癱患者下肢運動能力和步行能力的影響。方法:選取2020年6月—2021年12月吉林大學第一醫院康復科收治的38例符合納入標準的腦卒中偏癱患者,通過隨機數字表法將其隨機分為對照組(19例)和觀察組(19例)。兩組患者均給予常規康復治療,同時觀察組患者給予為期4周的下肢康復機器人治療。分別于治療前、治療2周后和4周后采用Berg平衡量表(Berg Balance Scale,BBS)、功能性步行量表 (Functional Ambulation Category,FAC)和改良Barthel指數(Modified Barthel Index,MBI)評估兩組患者的平衡功能、下肢運動功能、步行功能和日常生活活動(Activities of Daily Living,ADLs)能力。
結果:治療2周后,兩組患者的各項評分較治療前均無明顯差異(P>0.05)。治療4周后,兩組患者的各項評分均改善,差異有統計學意義(P<0.05)。結論:下肢康復機器人訓練可以顯著改善腦卒中偏癱患者的平衡能力、下肢運動功能、步行能力和ADLs能力。
關鍵詞 康復機器人;腦卒中;偏癱;下肢;步行功能
中圖分類號 R496 文獻標識碼 A 文章編號 2096-7721(2023)06-0512-05
Effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia
LI Jingze1, XING Jingsong2, LYU Fuxian2, LIU Fuqian2, DUAN Haoyang2
(1. School of Nursing, Jilin University, Changchun 130021, China; 2. Department of Rehabilitation, the First Hospital of
Jilin University, Changchun 130021, China)
Abstract Objective: To explore the effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia. Methods: 38 stroke patients with hemiplegia who were admitted to the Rehabilitation Department of the First Hospital of Jilin University from June 2020 to December 2021 were selected and randomly divided into the control group (19 cases) and observation group (19 cases) by random number table method. Patients in both groups were given routine rehabilitation treatment, while patients in the observation group were given lower limb rehabilitation robotic treatment for 4 weeks. Balance function, lower limb motor function, walking function and activities of daily living (ADLs) in both groups were assessed by berg balance scale (BBS), functional ambulation category (FAC) and modified barthel index (MBI) before treatment, 2 weeks and 4 weeks after treatment. Results: After 2 weeks of treatment, the scores of the two groups were not significantly improved compared with those before treatment (P>0.05), and there was no significant difference between the two groups (P>0.05). After 4 weeks of treatment, the scores of the two groups were improved by intra group comparison, and the differences were statistically significant (P<0.05), the differences in the scores of the two groups were statistically significant (P<0.05). Conclusion: Lower limb rehabilitation robotic training could effectively improve the balance ability, lower limb motor function, walking ability and ADLs ability of stroke patients with hemiplegia.
Key words Rehabilitation robot; Stroke; Hemiplegia; Lower limb; Walking function
收稿日期:2022-03-11 錄用日期:2022-11-21
Received Date: 2022-03-11 Accepted Date: 2022-11-21
基金項目:吉林省科技廳重點研發項目(20200404209YY)
Foundation Item: Key Research and Development Project of Jilin Provincial Science and Technology Department (20200404209YY)
通訊作者:段好陽,Email:duanhy101129@163.com
Corresponding Author: DUAN Haoyang, Email: duanhy101129@163.com
引用格式:李京澤,邢靖松,呂福現,等. 下肢康復機器人訓練對腦卒中偏癱患者步行功能的影響[J]. 機器人外科學雜志(中英文),2023,4(6):512-516.
Citation: LI J Z, XING J S, LYU F X, et al. Effect of lower limb rehabilitation robotic training on walking function of stroke patients with hemiplegia[J]. Chinese Journal of Robotic Surgery, 2023, 4(6): 512-516.
步行功能障礙是患者發生腦卒中偏癱后最常見的下肢問題,步行功能的改善程度是評價患者康復質量的標準之一[1]。目前,進行下肢運動訓練的方法有很多種,這些方法可在一定程度上改善患者的步行功能,但其優缺點各異。人工輔助步行功能訓練是促進下肢運動功能康復的重要方法之一,但由于人工輔助步行功能訓練過程中難以精確控制患者行走的步幅和步速,導致許多患者遺留下不同程度的“偏癱步態”,嚴重影響了患者的康復質量和心理狀態[2]。
近年來,隨著機器人技術的快速發展,康復機器人系統逐漸被運用到臨床患者的康復訓練中,有效地改善了腦卒中偏癱患者的肢體運動功能[3]。
本研究通過應用下肢康復機器人治療步行功能障礙患者,旨在討論其對腦卒中偏癱患者下肢運動能力和步行能力的影響。
1 資料與方法
1.1 臨床資料
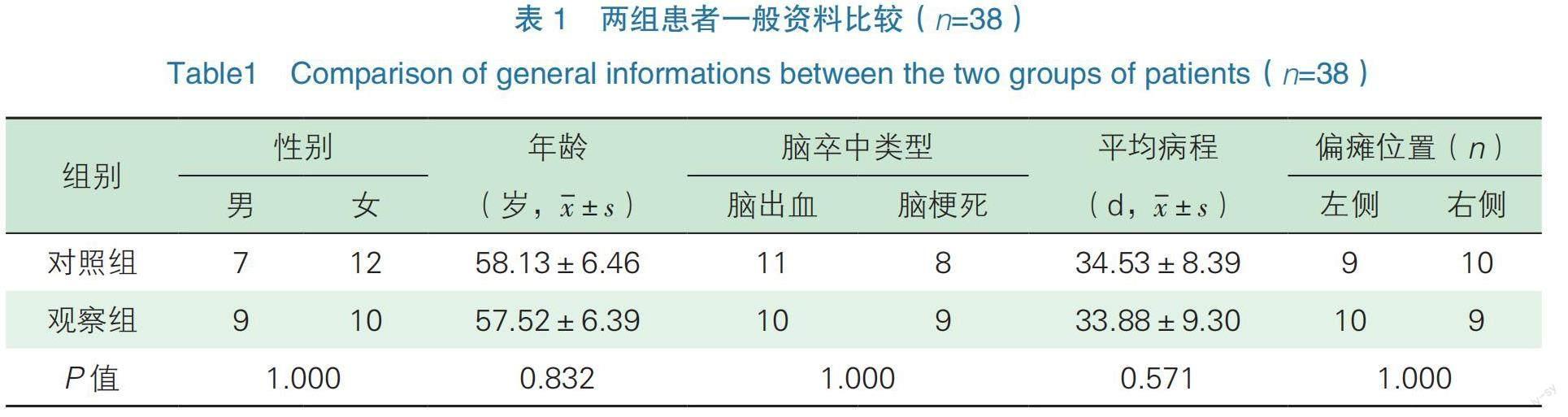
回顧性分析2020年6月—2021年12月吉林大學第一醫院康復科收治的38例腦卒中后偏癱患者的臨床資料,按隨機數字表法將其分為對照組和觀察組,各19例。比較兩組患者一般資料,差異無統計學意義(P>0.05),見表1。
納入標準:①首次發病,符合腦卒中診斷標準[4],并經影像學檢查確診;②單側發病;③偏癱側下肢運動功能的Brunnstrom分期≥Ⅲ期;④Holden步行功能分級≥1級;⑤病情穩定,配合治療且愿意簽署知情同意書者。
排除標準:①康復治療期間病情加重者;②腦卒中復發者;③患側髖、膝、踝關節被動活動范圍受限者;④存在其他臟器功能不全或惡性高血壓等合并癥者;⑤存在嚴重認知及交流障礙無法配合者。
1.2 方法
1.2.1 治療方法
兩組患者均給予常規康復訓練,每次共治療90 min,2次/d,6 d/周,連續康復訓練4周[4]。同時,觀察組患者給予下肢康復機器人訓練,每次訓練40 min,1次/d,6 d/周,連續康復訓練4周。
下肢康復機器人訓練具體方法:設備采用意大利Parabel公司生產的下肢步行姿勢訓練系統。①患者取坐位,選取合適大小的“靴子”,穿戴于患者足-踝-小腿部位;②緊固“靴子”的護套,通過“靴子”將患者下肢固定到機器人上;③將安全帶固定到患者骨盆和雙側髖關節處,通過懸吊系統使患者逐漸站立于運動平板上,使患者髖、膝關節得到充分伸展,并能支撐體重;④再次檢查所有護套和安全帶,以保證患者安全;⑤機器人的初始坡度設定為0°,速度設定為1 km/h,根據患者體重和舒適度調整減重力量,根據患者步行功能的進步逐級增加訓練強度[5]。
1.2.2 評定標準
于治療前、治療2周后和治療4周后,由不參與治療的康復評定師對兩組患者進行下肢運動能力、步行能力等方面的評定。患者的平衡能力采用Berg平衡量表(Berg Balance Scale,BBS)評定[6],患者下肢運動功能采用簡化的下肢Fugl-Meyer運動功能量表(Fugl-Meyer Assessment,FMA)評定[7],患者的步行能力采用功能性步行量表(Functional Ambulation Category,FAC)評定[8],患者日常生活活動(Activities of Daily Living,ADLs)能力采用改良Barthel指數(Modified Barthel Index,MBI)評定[9]。
1.2.3 統計學方法
所有數據采用SPSS 21.0統計學軟件進行分析處理,計數資料以“例”表示,采用 χ2檢驗進行比較,計量數據采用均數±標準差(x±s)表示,組間比較采用獨立樣本t檢驗,P<0.05表示差異有統計學意義。
2 結果
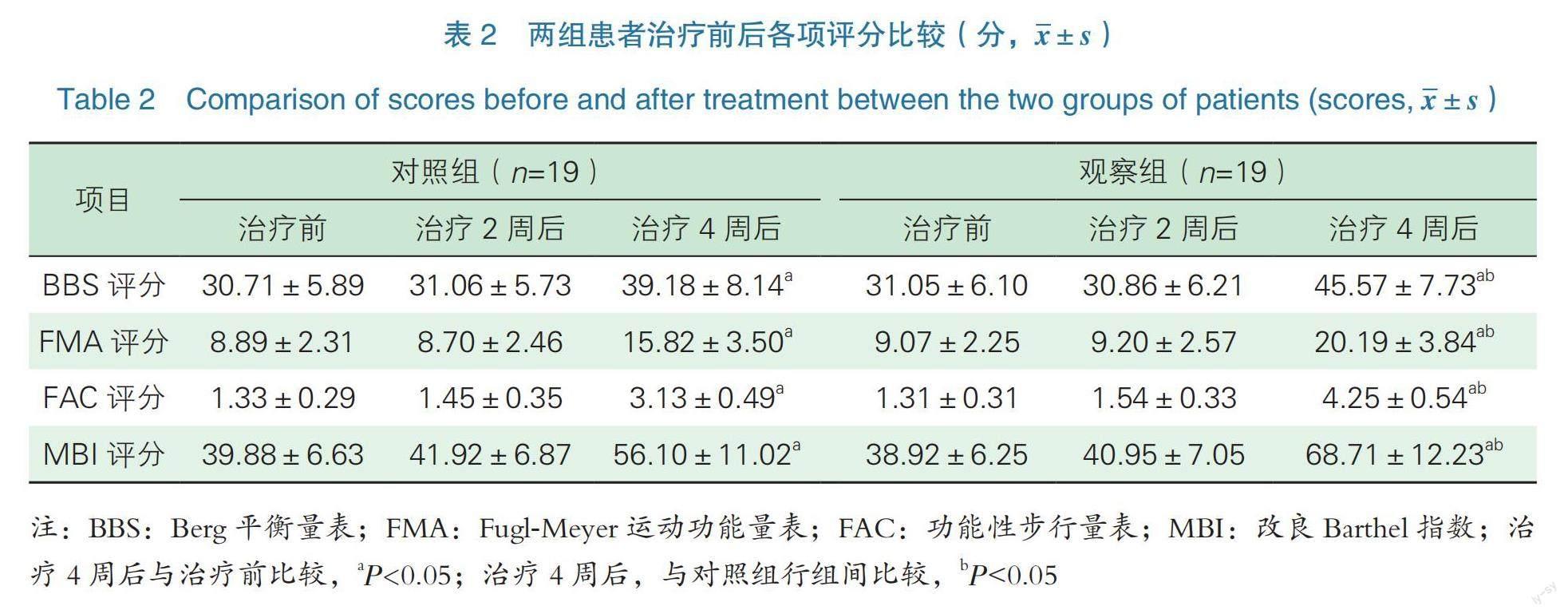
治療前,兩組患者的各項評分差異無統計學意義(P>0.05)。治療2周后,兩組患者的各項評分較治療前均無明顯改善,行組內和組間比較差異均無統計學意義(P>0.05)。治療4周后,兩組患者的各項評分較治療前均顯著改善,行組內和組間比較差異均有統計學意義(P<0.05),且觀察組患者的各項評分明顯優于對照組(見表2)。
3 討論
多數患者在發生腦卒中后會遺留不同程度的肢體功能障礙,步行功能障礙是其中較常見的后遺癥,主要表現為患側下肢的承重能力減弱,平衡功能和協調能力降低,使得患者步幅縮短、步速減慢、步行效率下降,增加跌倒的風險,嚴重地影響了患者的運動功能和生活自理能力,同時也給家庭和社會造成沉重的經濟負擔。傳統康復治療方案是治療師通過控制患者的髖、膝和踝關節,讓患者重復性模擬地面自然行走。這種訓練模式在一定程度上限制了骨盆和軀干的生理運動,難以將步行中的負重、平衡、邁步三要素有機結合,缺乏系統的內部感覺反饋及外部感覺反饋,導致動作缺乏實用性和連貫性,其康復治療效果往往不甚理想,同時這種訓練模式會大量消耗治療師的體力,患者也缺乏對訓練的興趣和積極性,隨著患者訓練時間的延長,難以達到高強度、重復性訓練要求,且容易出現異常步態[10-12]。
近年來,下肢康復機器人在臨床康復中的應用已受到越來越多醫務人員的重點關注[13]。與人工輔助步行訓練相比,下肢康復機器人輔助訓練具有效率高、重復性強等優勢,能在一定程度上代替治療師引導偏癱患者進行持續的、不間斷的步行訓練,減輕了人力成本。下肢康復機器人的減重系統可以調整患者雙足間的距離以及足內外翻、踝關節屈伸的角度,達到精準治療的目的,同時患者在減重后的步行耗能降低,促使患者堅持完成康復訓練。下肢康復機器人的步態矯正系統通過設定運動速度、步態偏角度、足間距等來抑制患者異常步態,避免足下垂、足內外翻等情況的發生,幫助患者在早期康復訓練中進行接近正常生理步態的重復性訓練,有效提高步行穩定性,建立正常的步行模式。下肢康復機器人的負荷刺激及感覺輸入系統可刺激下肢髖、膝、踝及足底等各關節本體感受器,強化下肢感覺的輸入,重建正常運動模式,從而改善下肢的運動功能。下肢康復機器人的虛擬現實訓練系統能夠減少患者被動治療的枯燥性,提高患者的依從性和主動參與治療的積極性。腦卒中患者通過下肢康復機器人的重復動作訓練,可建立正確的運動模式,改善其步行功能[14-16]。
本研究顯示,與治療前比較,治療2周后兩組患者的各項評分較治療前均無明顯改善,行組內比較和組間比較,差異均無統計學意義(P>0.05),這可能與患者平衡能力、下肢運動功能和步行能力的恢復需要一段時間的積累有關,這說明短時間的訓練并不能顯著改善患者的功能。治療4周后與治療前比較,兩組患者的各項評分均有顯著改善,差異有統計學意義(P<0.05),這表明常規的康復治療和常規康復治療聯合下肢康復機器人訓練都可以改善腦卒中后偏癱患者的平衡能力,促進其下肢運動功能和步行能力恢復。行組間比較,觀察組患者的各項評分明顯優于對照組,差異均有統計學意義(P<0.05),這表明通過下肢康復機器人訓練可對患者的運動模式進行調整,根據患者的具體情況和功能恢復進展情況制定有針對性的治療方案,通過設置患者髖、膝、踝關節的屈伸角度、訓練時間、角速度等參數,設定符合患者生理運動的模式,促進患者整體運動功能的改善,提高康復療效。
綜上所述,針對腦卒中偏癱患者的下肢運動功能障礙,經過4周的下肢康復機器人康復訓練,可有效提高患側下肢的肌力、改善其步行功能,值得臨床推廣應用。由于條件限制,本文只做了小樣本研究,未來有待于更大樣本量的深入研究進一步證實。
參考文獻
[1] 段好陽, 閆兆紅, 劉娜, 等. 等速肌力訓練不同介入時機和治療時程對恢復期腦卒中偏癱患者步行功能的影響[J].中國康復醫學雜志, 2018, 33(10): 1173-1177.
[2] 施愛梅, 鄭琦, 柏和風, 等. 骨盆輔助式康復機器人聯合重復經顱磁刺激對腦卒中后偏癱患者下肢功能的影響[J].中華物理醫學與康復雜志, 2021, 43(8): 712-716.
[3] 樂琳. 下肢康復機器人對腦梗死后下肢偏癱患者康復的影響[J].中華物理醫學與康復雜志, 2020, 42(6): 536-538.
[4] 中華神經科學會, 中華神經外科學會. 各類腦血管疾病診斷要點[J].中華神經科雜志, 1996, 29(6): 379-380.
[5] 熊華春, 陳精慧, 王軍, 等. 下肢康復機器人訓練對痙攣型腦癱患兒粗大運動功能及平衡功能的影響[J].鄭州大學學報(醫學版), 2021, 47(3): 370-375.
[6] 段好陽, 閆兆紅. 動態平衡訓練儀治療老年腦卒中后傾斜綜合征的臨床療效[J].中國老年學雜志, 2018, 38(17): 4132-4134.
[7] 周維金, 孫啟良. 癱瘓康復評定手冊[M].北京: 人民衛生出版社, 2006: 46-50.
[8] Hesse S, Konrad M, Uhlenbrock D.Treadmill walking with partial body weight support versus floor walking in hemiparetic subjects[J].Arch Phys Med Rehabil, 1999, 80(4): 421-427.
[9] 段好陽, 李貞蘭, 呂福現, 等. 不同屈膝肌群和伸膝肌群肌力比值的等速肌力訓練治療腦卒中后膝過伸的療效評價[J].吉林大學學報(醫學版), 2021, 47(6): 1538-1543.
[10] 胡思學, 錢開林, 秦義婷, 等. 上肢和肩周肌力訓練對脊髓損傷患者轉移功能和日常生活活動能力的影響[J].中華物理醫學與康復雜志, 2019, 41(10): 748-751.
[11] 毋楠楠.早期等速肌力訓練對腦卒中偏癱患者肌力與平衡功能的影響[J].實用醫藥雜志, 2020, 37(11): 1001-1003.
[12] 段好陽, 劉福遷, 閆兆紅, 等. 四肢聯動功能訓練對腦卒中患者軀干控制能力及平衡功能的影響[J].中華物理醫學與康復雜志, 2015, 37(10): 747-749.
[13] 鄧曉青. 機器人早期輔助步行訓練對腦卒中后偏癱患者下肢運動功能的影響[J].廣州醫科大學學報, 2018, 46(3): 20-23.
[14] 裴強, 周誠, 王毅, 等. 下肢康復機器人訓練對腦卒中患者下肢運動功能的影響[J].中國傷殘醫學, 2021, 29(7): 71-73.
[15] 孫志成, 朱曉軍, 管重遠, 等. 下肢運動控制訓練聯合核心穩定性訓練對腦卒中偏癱患者下肢功能恢復的影響[J].中華物理醫學與康復雜志, 2015, 37(4): 270-273.
[16] 劉暢, 郄淑燕, 王寒明, 等. 下肢康復機器人對腦卒中偏癱患者下肢運動功能與步行能力的效果[J].中國康復理論與實踐, 2017, 23(6): 696-700.
猜你喜歡
中國實用醫藥(2016年27期)2016-11-30 11:36:50
中國醫藥導報(2016年25期)2016-11-30 07:48:35
中外醫學研究(2016年24期)2016-11-30 02:30:04
今日健康(2016年12期)2016-11-17 13:04:21
中國實用醫藥(2016年24期)2016-10-17 06:05:29
中國實用醫藥(2016年24期)2016-10-17 05:56:32
中國實用醫藥(2016年24期)2016-10-17 05:47:48
中國實用醫藥(2016年24期)2016-10-17 05:30:14
養生保健指南(2016年4期)2016-03-22 11:53:54