基于尺度律的輕量化協(xié)作機(jī)器人關(guān)節(jié)傳動(dòng)系統(tǒng)優(yōu)化選型*
2023-09-22 07:54:46林家春員若男
機(jī)電工程 2023年9期
林家春,蘇 浩,員若男
(1.北京工業(yè)大學(xué) 材料與制造學(xué)部,北京 100124;2.北京市精密測(cè)控技術(shù)與儀器工程技術(shù)研究中心,北京 100124)
0 引 言
隨著協(xié)作機(jī)器人得到廣泛應(yīng)用,人們對(duì)機(jī)器人技術(shù)也在不斷提出新要求。新一代的協(xié)作機(jī)器人應(yīng)具有高效率、高功率密度比、輕量化等特點(diǎn)[1],尤其是在移動(dòng)和可穿戴機(jī)器人(例如外骨骼)領(lǐng)域,高效率和低重量至關(guān)重要。
協(xié)作機(jī)器人關(guān)節(jié)是協(xié)作機(jī)器人總重量的主要來(lái)源[2],其核心部分是由電機(jī)和諧波減速器組成的傳動(dòng)系統(tǒng),決定整個(gè)關(guān)節(jié)的重量和性能[3]。因此,從源頭出發(fā),實(shí)現(xiàn)關(guān)節(jié)輕量化設(shè)計(jì)的關(guān)鍵是對(duì)電機(jī)和減速器進(jìn)行優(yōu)化選型。
傳統(tǒng)的電機(jī)和減速器的選型通常采用順序法,即根據(jù)負(fù)載特性,從備選目錄中選擇減速器和電機(jī)[4]。傳動(dòng)比選擇的原則是在滿足性能要求的前提下,盡可能降低電機(jī)尺寸,以節(jié)約成本。這種方法由于需要從初始選擇開(kāi)始,在所有可能的組合中進(jìn)行枚舉或試錯(cuò),需要耗費(fèi)大量時(shí)間才能找到合適的組合,因此其效率非常低下;并且該方法也不能保證探索所有可能的解決方案,其會(huì)導(dǎo)致解決方案過(guò)大或者次優(yōu),從而不能找到最佳的電機(jī)和減速器的組合[5]。
針對(duì)機(jī)電系統(tǒng)電機(jī)和減速器的優(yōu)化選型問(wèn)題,國(guó)內(nèi)外學(xué)者提出了多種解決辦法。
PASCH KA等人[6]引入了慣量匹配的概念,并在理想條件下,將其用于選擇負(fù)載加速度最大的傳動(dòng)比。VAN D S H J等人[7,8]通過(guò)將扭矩、速度和傳動(dòng)比進(jìn)行了標(biāo)準(zhǔn)化處理,解決了傳動(dòng)系統(tǒng)的設(shè)計(jì)問(wèn)題。ROOS F[9]建立了電機(jī)和減速器的數(shù)據(jù)庫(kù),并從中提取了選型參數(shù)(如尺寸、重量),設(shè)計(jì)人員可以根據(jù)不同的設(shè)計(jì)需求對(duì)數(shù)據(jù)庫(kù)中的信息進(jìn)行篩選,最終得到滿足要求的組合。ZHOU L[10]在傳動(dòng)系統(tǒng)建模過(guò)程中,考慮了電機(jī)和減速器的特性,包括傳動(dòng)比、齒輪慣量、電機(jī)慣量和齒輪效率等,對(duì)輕量化機(jī)器人機(jī)械臂傳動(dòng)鏈進(jìn)行了優(yōu)化設(shè)計(jì)。CUSIMANO G[11]在純慣性負(fù)載的情況下,通過(guò)計(jì)算符合重量最小化所需連續(xù)扭矩最佳齒輪比的方法,以此來(lái)選擇合適的電機(jī)和減速器。MEONI F[12]提出了機(jī)電伺服軸模型,該模型從商業(yè)手冊(cè)中提取了數(shù)據(jù),對(duì)影響電機(jī)和減速器運(yùn)行的參數(shù)進(jìn)行了數(shù)據(jù)擬合,在此基礎(chǔ)上提出了一種連續(xù)優(yōu)化程序,采用該程序可以找到各種目標(biāo)函數(shù)的最佳電機(jī)和減速器組合。RICHIEDEI D等人[13]提出了一種基于尺度律的方法,該方法改進(jìn)了最佳齒輪比的概念,采用尺度律說(shuō)明了電機(jī)、減速器和傳動(dòng)比之間的主要關(guān)系,最終得到了電機(jī)和減速器的最佳組合。
以上文獻(xiàn)中提到的優(yōu)化方法大都是用于對(duì)機(jī)器人關(guān)節(jié)傳動(dòng)系統(tǒng)的傳動(dòng)比進(jìn)行優(yōu)化,但在優(yōu)化過(guò)程中,同時(shí)考慮重量、尺寸的研究并不多見(jiàn)。
近年來(lái),優(yōu)化設(shè)計(jì)已經(jīng)成為加快協(xié)作機(jī)器人產(chǎn)品上市的重要途徑[14]。因此,筆者以實(shí)現(xiàn)協(xié)作機(jī)器人關(guān)節(jié)的輕量化設(shè)計(jì)為目標(biāo),提出一種基于尺度律的優(yōu)化選型方法。
首先,建立傳動(dòng)系統(tǒng)的動(dòng)態(tài)模型,構(gòu)建以減速器和電機(jī)重量最小化為目標(biāo)的優(yōu)化函數(shù);其次,構(gòu)建尺度律模型將傳動(dòng)系統(tǒng)所涉及的相關(guān)特性參數(shù)簡(jiǎn)化,并通過(guò)所建立的電機(jī)和減速器的數(shù)據(jù)庫(kù),對(duì)尺度律模型的正確性進(jìn)行驗(yàn)證;最后,采用具體選型實(shí)例對(duì)該方法的有效性進(jìn)行驗(yàn)證。
1 傳動(dòng)系統(tǒng)特性及要求
1.1 關(guān)節(jié)傳動(dòng)系統(tǒng)建模
一個(gè)通用的伺服傳動(dòng)系統(tǒng)模型可以通過(guò)伺服電機(jī)、傳動(dòng)裝置和負(fù)載三個(gè)關(guān)鍵要素來(lái)表示[15]。
傳動(dòng)系統(tǒng)模型如圖1所示。
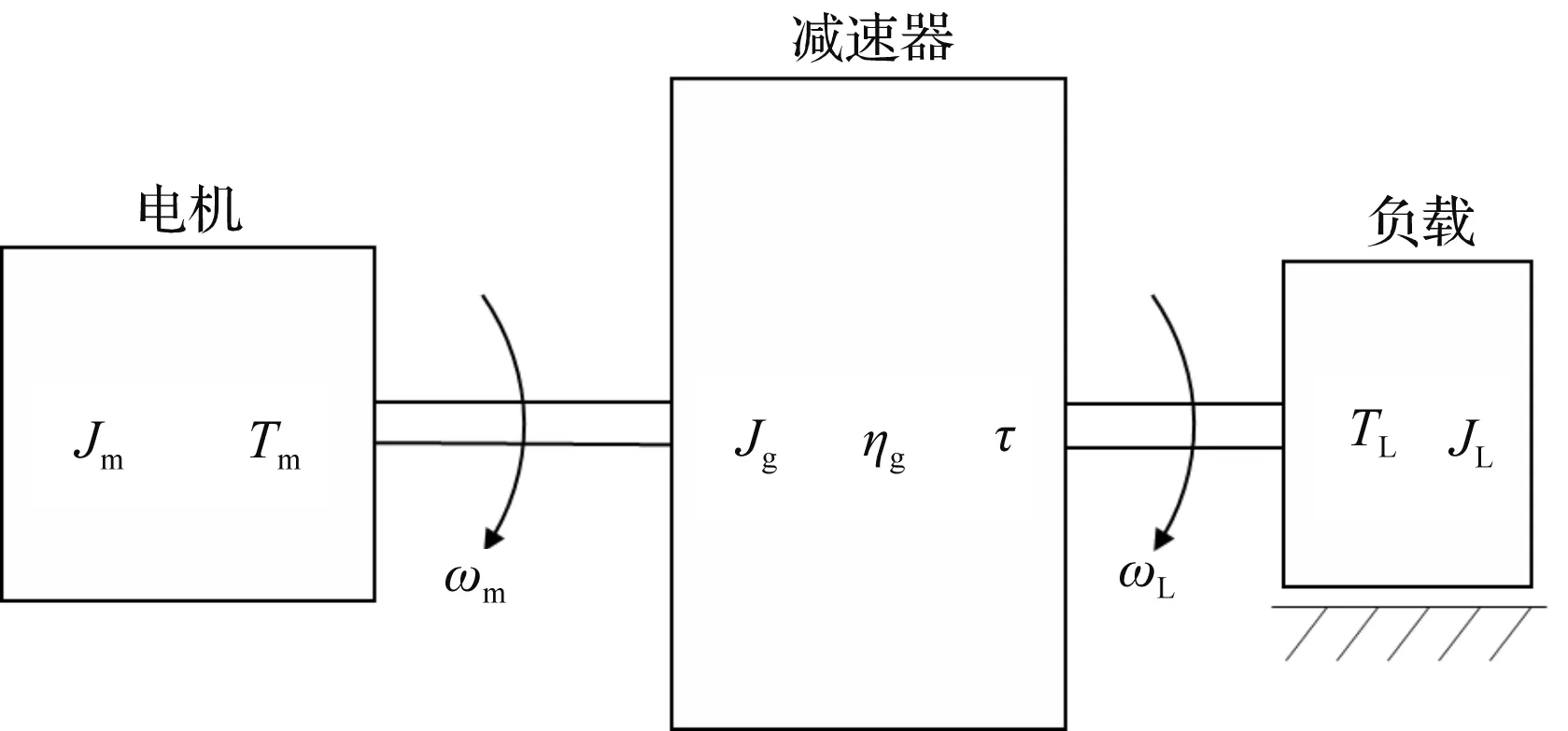
圖1 傳動(dòng)系統(tǒng)模型
該模型可以代表多種機(jī)電系統(tǒng),具有普遍適用性。協(xié)作機(jī)器人關(guān)節(jié)也可以用該模型進(jìn)行表示。
筆者將圖1中的伺服傳動(dòng)系統(tǒng)的動(dòng)態(tài)模型寫(xiě)成扭矩平衡方程。在恒定的負(fù)載條件下,電機(jī)驅(qū)動(dòng)指定負(fù)載所需的電機(jī)扭矩Tm(t)為:
(1)

其中:
(2)
式中:ηd為機(jī)械效率;ηr為正向的機(jī)械效率。
考慮機(jī)械效率不同的流動(dòng)方向?qū)λ欧?qū)動(dòng)系統(tǒng)的選擇十分重要[13]。TL是由負(fù)載慣性轉(zhuǎn)矩、黏性摩擦力和外部扭矩組成的合力,其計(jì)算公式如下:
(3)
式中:Te為負(fù)載扭矩;JL為負(fù)載的轉(zhuǎn)動(dòng)慣量;kf為黏性摩擦系數(shù);ωL為負(fù)載的轉(zhuǎn)速。
負(fù)載的特性在進(jìn)行選型之前是已知的,它取決于負(fù)載的運(yùn)動(dòng)曲線。通過(guò)將負(fù)載的運(yùn)動(dòng)曲線和這些模型用于表示傳動(dòng)裝置和負(fù)載之間外部扭矩,可計(jì)算得到TL。
根據(jù)式(1)可知,驅(qū)動(dòng)給定負(fù)載所需的電機(jī)扭矩取決于負(fù)載、電機(jī)和減速器的慣量。
1.2 電機(jī)選擇標(biāo)準(zhǔn)
協(xié)作機(jī)器人關(guān)節(jié)電機(jī)通常采用永磁同步電機(jī)(perma-nent magnet synchronous motor, PMSM)。為了保證電機(jī)能夠驅(qū)動(dòng)負(fù)載,電機(jī)的選擇必須滿足如下三個(gè)條件。
電機(jī)在運(yùn)轉(zhuǎn)過(guò)程中由于黏性摩擦、鐵損和磁滯產(chǎn)生熱量,且電機(jī)溫度會(huì)隨速度增加而增加[16],為防止電機(jī)過(guò)熱,一個(gè)周期T內(nèi)所需電機(jī)轉(zhuǎn)矩的均方根值(RMS)應(yīng)小于等于電機(jī)的連續(xù)轉(zhuǎn)矩,表示如下:
Tm,rated≥Tm,rms
(4)
其中:
(5)
將式(1)、式(5)結(jié)合,可以得到電機(jī)額定轉(zhuǎn)矩的約束條件為:
(6)
負(fù)載曲線的最大扭矩值必須小于或等于電機(jī)的額定扭矩值:
Tm,peak≥Tm,max
(7)
其中:
(8)
電機(jī)的最大轉(zhuǎn)速必須高于負(fù)載曲線所需的最大速度:
ωm,max≥ωL,max
(9)
式(4)、式(7)、式(9)表示伺服驅(qū)動(dòng)系統(tǒng)中的任何電機(jī)選擇時(shí)必須滿足的約束條件。
1.3 減速器選擇標(biāo)準(zhǔn)
伺服驅(qū)動(dòng)系統(tǒng)應(yīng)用經(jīng)常使用三種減速器:傳統(tǒng)齒輪副、行星齒輪系和諧波傳動(dòng)[17]。諧波減速器憑借其傳動(dòng)比范圍大、承載能力強(qiáng)、運(yùn)動(dòng)精度高等優(yōu)點(diǎn)被廣泛應(yīng)用于協(xié)作機(jī)器人關(guān)節(jié)中。
在選擇諧波減速器時(shí),通常需要考慮以下三個(gè)條件:
Tg,rated>TL,maxfs
(10)
安全系數(shù)fs具體選擇數(shù)值由協(xié)作機(jī)器人實(shí)際應(yīng)用領(lǐng)域和每小時(shí)的工作循環(huán)數(shù)決定,通常有:
fs>1.4
(11)
減速器的額定扭矩要大于負(fù)載的平均扭矩,即:
Tg,rated>TL,Rmc
(12)
諧波減速器通常使用TL,Rmc值來(lái)計(jì)算額定扭矩,該值是對(duì)諧波減速器結(jié)構(gòu)部件累計(jì)疲勞的量度[18],故其數(shù)值與減速器的壽命有關(guān)。其計(jì)算標(biāo)準(zhǔn)已經(jīng)用于機(jī)器人應(yīng)用中,其中TL,Rmc的計(jì)算公式如下:
(13)
假定電機(jī)能驅(qū)動(dòng)給定負(fù)載,在滿足以上減速器的選擇條件下,允許的最大傳動(dòng)比為:
(14)
式(10)、式(12)和式(14)表示了伺服驅(qū)動(dòng)系統(tǒng)中任何減速器選擇時(shí)必須滿足的條件。
橫縱比能反映出電機(jī)和減速器對(duì)關(guān)節(jié)尺寸的影響,反映機(jī)器人關(guān)節(jié)的扁平程度。為防止選型得到的關(guān)節(jié)形狀與實(shí)際不符,筆者根據(jù)協(xié)作機(jī)器人關(guān)節(jié)實(shí)際應(yīng)用對(duì)橫縱比進(jìn)行約束,表示如下:
(15)
式中:lm為電機(jī)長(zhǎng)度;dg為減速器直徑
以上電機(jī)和減速器的選擇條件具有普遍性,適用于任何傳動(dòng)系統(tǒng)選型。
1.4 目標(biāo)函數(shù)優(yōu)化
優(yōu)化目標(biāo)是在滿足驅(qū)動(dòng)負(fù)載性能要求的基礎(chǔ)上,從建立的電機(jī)和減速器數(shù)據(jù)庫(kù)中找到重量最輕的組合。因此,筆者將目標(biāo)函數(shù)f(x)定義為電機(jī)重量mm和減速器重量mg的總和,可表示為:

(16)
式中:變量x為數(shù)據(jù)庫(kù)中所有滿足驅(qū)動(dòng)負(fù)載條件的電機(jī)sm和減速器sg的組合。
從式(16)可知,優(yōu)化函數(shù)涉及眾多參數(shù)。
為了能清晰、快速有效地找到滿足優(yōu)化目標(biāo)的電機(jī)和減速器的組合,方程式中涉及的參數(shù)必須減少。為解決該問(wèn)題,筆者采用尺度律對(duì)傳動(dòng)系統(tǒng)的每個(gè)組件重新建模,將涉及多個(gè)參數(shù)的優(yōu)化目標(biāo)函數(shù)減少為僅由2個(gè)參數(shù)表示:電機(jī)堵轉(zhuǎn)轉(zhuǎn)矩Tstall和減速比τ。
2 尺度律及其應(yīng)用
2.1 尺度律介紹
尺度律(也稱相似律),是表示兩個(gè)相互聯(lián)系的物理量之間的函數(shù)關(guān)系的尺度律模型[19]。尺度律被應(yīng)用于許多不同領(lǐng)域,如微系統(tǒng)、力學(xué)、液壓、流體力學(xué)等,其被用來(lái)確定或調(diào)整系統(tǒng)的尺寸,評(píng)估系列化產(chǎn)品的開(kāi)發(fā)成本[20]。
在設(shè)計(jì)問(wèn)題中使用尺度律是非常有利的,因?yàn)樗蟠鬁p少了某些物理量所涉及的參數(shù)數(shù)量,從而避免出現(xiàn)由于物理量的模型過(guò)于復(fù)雜而導(dǎo)致系統(tǒng)無(wú)法使用[4]的情況。許多文獻(xiàn)中使用尺度律對(duì)機(jī)電一體化產(chǎn)品進(jìn)行分析設(shè)計(jì)與優(yōu)化,并應(yīng)用于機(jī)器人系統(tǒng)、電機(jī)、無(wú)人機(jī)等設(shè)備中。
尺度律是代數(shù)模型,通常采用冪指數(shù)的形式:
(17)
y*與x*的計(jì)算分別為:
(18)
式中:y為所研究的參數(shù);xi為組成研究參數(shù)中具有代表性的獨(dú)立性參數(shù);i為參數(shù)的數(shù)量;xref,yref為假定的參考值[21]。
筆者采用尺度律,將電機(jī)和減速器的參數(shù)表示為其尺寸的參數(shù)的模型。這些模型用于表示τ、Tstall與Jm、mm、Tg,rated、mg、Jg之間的關(guān)系。
尺度律模型的評(píng)估和驗(yàn)證的主要數(shù)據(jù)來(lái)源是電機(jī)和減速器廠家目錄中的技術(shù)參數(shù)數(shù)據(jù),并使用最小二乘法擬合來(lái)獲得尺度律模型參數(shù)。文中所提出的尺度律模型對(duì)任何其他幾何形狀仍然有效。
2.2 電機(jī)尺度律
2.2.1 電機(jī)轉(zhuǎn)動(dòng)慣量尺度律模型
文獻(xiàn)[21]指出,電機(jī)的堵轉(zhuǎn)轉(zhuǎn)矩的計(jì)算公式為:
(19)
式中:C為電機(jī)的利用率;lm為電機(jī)長(zhǎng)度;rm為電機(jī)半徑。
電機(jī)轉(zhuǎn)動(dòng)慣量的計(jì)算公式為:
(20)
式中:ρm為電機(jī)密度;τ為減速比。

(21)
為了驗(yàn)證該尺度律模型的準(zhǔn)確性,筆者采用最小二乘法對(duì)2個(gè)參數(shù)進(jìn)行擬合,參數(shù)數(shù)據(jù)來(lái)自建立的電機(jī)數(shù)據(jù)庫(kù)。擬合結(jié)果如圖2所示。
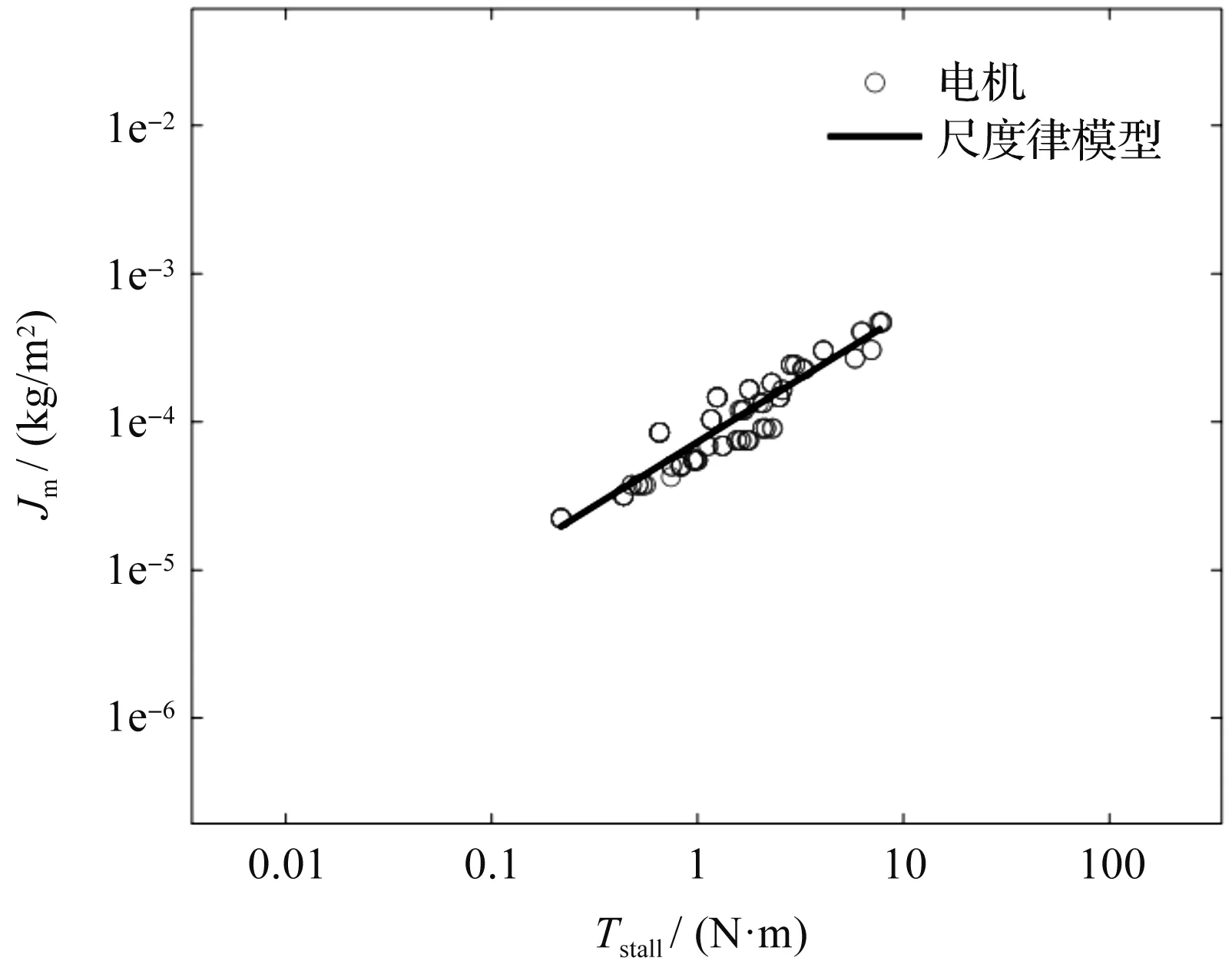
圖2 電機(jī)轉(zhuǎn)動(dòng)慣量的尺度律模型與實(shí)際數(shù)據(jù)對(duì)比
圖2中:黑線是根據(jù)尺度律模型擬合得到的值,圓圈是從數(shù)據(jù)庫(kù)中得到的電機(jī)數(shù)據(jù)。
式(21)中am是最小二乘法擬合電機(jī)數(shù)據(jù)得到的系數(shù)值。從擬合的結(jié)果中可以看出,實(shí)際數(shù)據(jù)點(diǎn)與所提出的尺度律幾乎是一致的,從而驗(yàn)證了該尺度律模型的準(zhǔn)確性。
2.2.2 電機(jī)重量尺度律模型
文獻(xiàn)[16]得出了電機(jī)的額定轉(zhuǎn)矩與轉(zhuǎn)子半徑和長(zhǎng)度的關(guān)系式:
(22)
式中:Cm為在特定的電機(jī)類型和相同的冷卻條件下的恒定常數(shù)值。
而電機(jī)重量的計(jì)算為:
(23)
mm=anTm,rated
(24)
式中:an為擬合得到的系數(shù)值。
同樣,筆者采用最小二乘法對(duì)該模型進(jìn)行擬合驗(yàn)證,擬合結(jié)果如圖3所示。
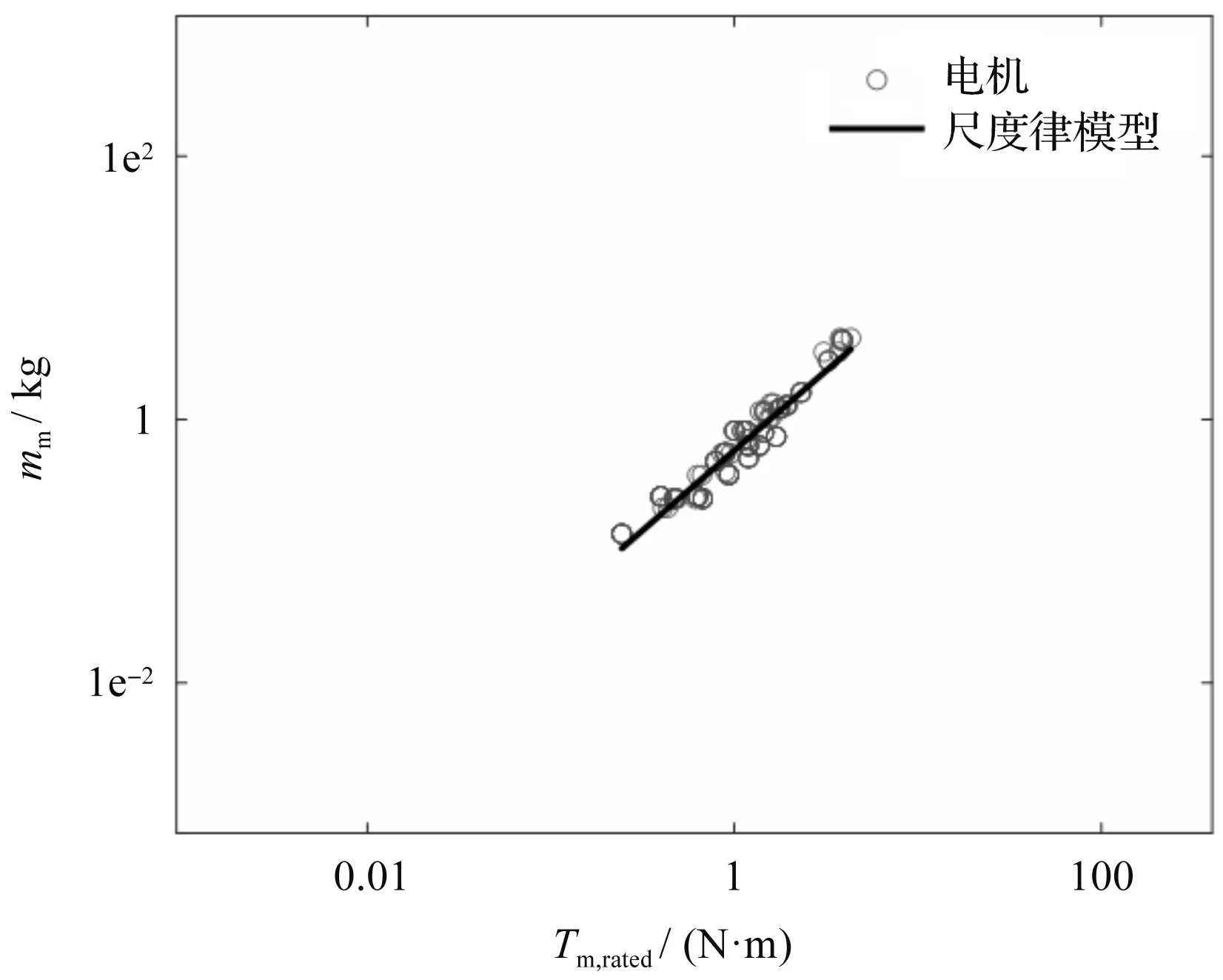
圖3 電機(jī)重量的尺度律模型和實(shí)際數(shù)據(jù)對(duì)比
2.3 減速器尺度律
2.3.1 減速器重量與轉(zhuǎn)動(dòng)慣量尺度律模型
對(duì)于減速器重量與轉(zhuǎn)動(dòng)慣量的尺度律模型,同樣是筆者將減速器的幾何尺寸與其相關(guān)的不同參數(shù)聯(lián)系起來(lái)得到的[22],表示如下:
(25)
mg=ahTg,rated
(26)
擬合驗(yàn)證的結(jié)果如下。
減速器轉(zhuǎn)動(dòng)慣量的尺度律模型與實(shí)際數(shù)據(jù)對(duì)比如圖4所示。
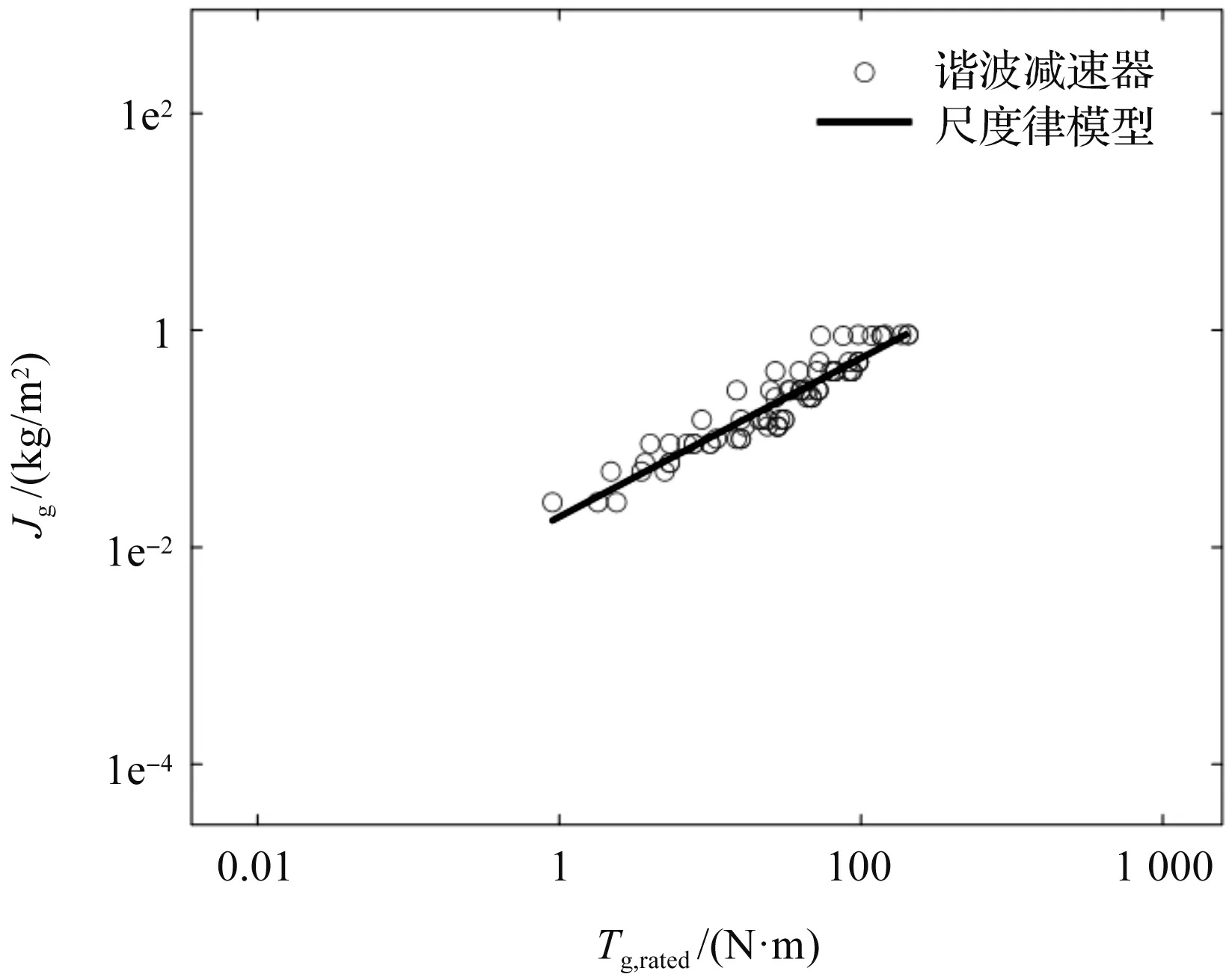
圖4 減速器轉(zhuǎn)動(dòng)慣量的尺度律模型與實(shí)際數(shù)據(jù)對(duì)比
減速器重量的尺度律模型和實(shí)際數(shù)據(jù)對(duì)比如圖5所示。
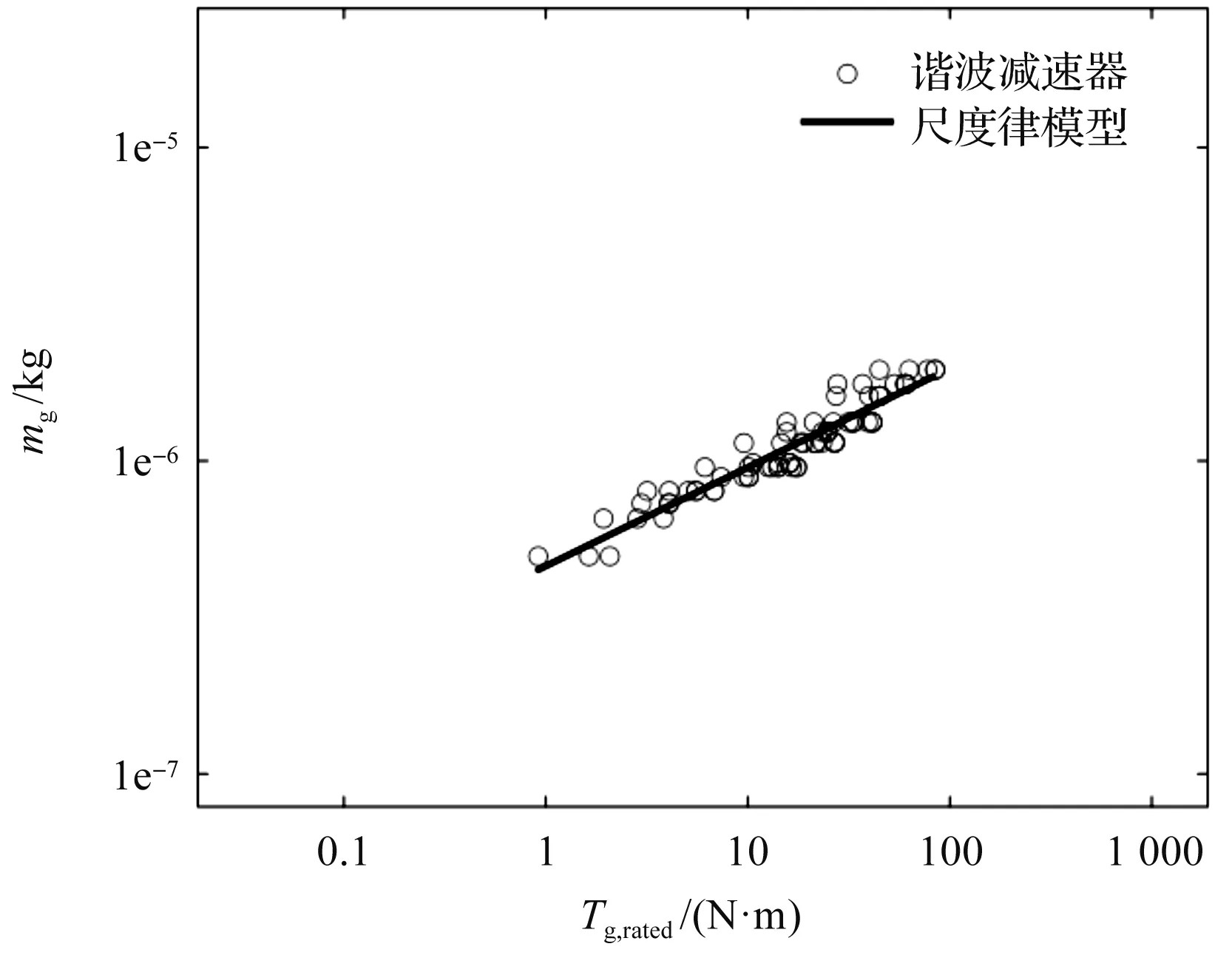
圖5 減速器重量的尺度律模型和實(shí)際數(shù)據(jù)對(duì)比
2.3.2 減速器減速比尺度律模型
由式(25)可知,減速器的轉(zhuǎn)動(dòng)慣量可以通過(guò)其額定轉(zhuǎn)矩近似表示。文獻(xiàn)[5,13]提出,減速器的轉(zhuǎn)動(dòng)慣量與減速比具有相關(guān)性,如果對(duì)具有近似相等額定轉(zhuǎn)矩的減速器進(jìn)行縮放,可以得到減速比與轉(zhuǎn)動(dòng)慣量的尺度律模型如下:
Jg=arτ-1
(27)
擬合驗(yàn)證結(jié)果如圖6所示。
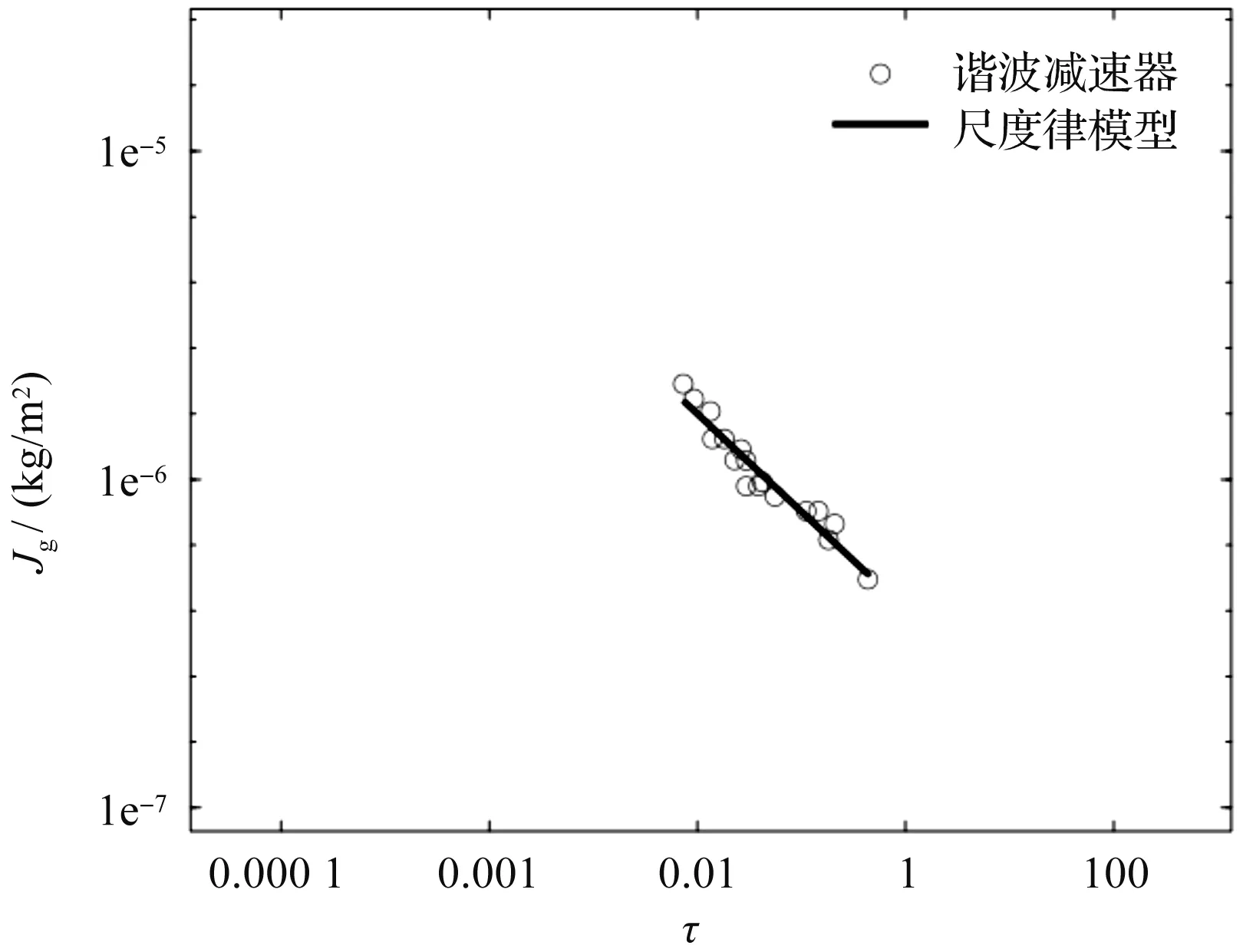
圖6 減速比的尺度律模型和實(shí)際數(shù)據(jù)對(duì)比
3 系統(tǒng)選型程序
3.1 優(yōu)化函數(shù)簡(jiǎn)化
根據(jù)第2節(jié)的尺度律可知,電機(jī)的重量為mm∝Tm,rated,減速器的重量為mm∝Tg,rated。因此可以將目標(biāo)函數(shù)改寫(xiě)為:
(28)
而對(duì)于電機(jī)的額定轉(zhuǎn)矩值,由式(4)可知,其可以由電機(jī)轉(zhuǎn)矩的均方根值表示:

(29)
同時(shí),由式(25)、式(27)可知,減速器額定轉(zhuǎn)矩又可以表示為:
(30)
最終,筆者將電機(jī)、減速器的尺度律模型代入,得到簡(jiǎn)化后的目標(biāo)函數(shù)為:

(31)
式中:an、am、ar、ah、ag都已知,其數(shù)值均為通過(guò)最小二乘法擬合后得到的系數(shù)值。
分析式(31)可知,關(guān)節(jié)傳動(dòng)系統(tǒng)總重量的優(yōu)化函數(shù)在簡(jiǎn)化后僅與電機(jī)的堵轉(zhuǎn)轉(zhuǎn)矩Tstall和減速比τ有關(guān)。
3.2 系統(tǒng)選型程序
筆者針對(duì)協(xié)作機(jī)器人關(guān)節(jié)傳動(dòng)系統(tǒng)的選型提出了一種基于尺度律的方法,以實(shí)現(xiàn)關(guān)節(jié)的輕量化設(shè)計(jì)為目標(biāo),選擇電機(jī)和減速器的最小重量組合。其步驟如下:
2)根據(jù)1.2節(jié)和1.3節(jié)提出的選擇標(biāo)準(zhǔn),在數(shù)據(jù)庫(kù)中選擇合適的電機(jī)和減速器;
3)對(duì)從數(shù)據(jù)庫(kù)中得到符合條件的電機(jī)和減速器,根據(jù)第2節(jié)建立的模型,利用最小二乘法進(jìn)行數(shù)據(jù)擬合,從而得到尺度律常數(shù);
4)建立電機(jī)和減速器組合的最小重量為目標(biāo)的優(yōu)化函數(shù),并將尺度律代入,將其簡(jiǎn)化為僅由電機(jī)堵轉(zhuǎn)轉(zhuǎn)矩Tstall和減速比τ組成的函數(shù);
5)將滿足驅(qū)動(dòng)負(fù)載條件的電機(jī)和減速器數(shù)據(jù)代入優(yōu)化函數(shù)中進(jìn)行計(jì)算,根據(jù)計(jì)算結(jié)果確定電機(jī)和減速器的實(shí)際選擇型號(hào)。
4 選型實(shí)例和試驗(yàn)
為了證明該方法的有效性,筆者選取了市面上兩款不同廠家(A和B)不同型號(hào)的協(xié)作機(jī)器人關(guān)節(jié)(各關(guān)節(jié)性能參數(shù)數(shù)據(jù)均來(lái)自于廠商官網(wǎng)),在相同的設(shè)計(jì)指標(biāo)的條件下,采用基于尺度律的方法進(jìn)行選型計(jì)算,將得到的結(jié)果與兩款關(guān)節(jié)的實(shí)際重量進(jìn)行比較。
該方法是用于對(duì)協(xié)作機(jī)器人關(guān)節(jié)的電機(jī)和減速器進(jìn)行選擇,通常電機(jī)和減速器的重量占關(guān)節(jié)總重量的70%左右。
兩款關(guān)節(jié)的廠家及型號(hào)如表1所示。
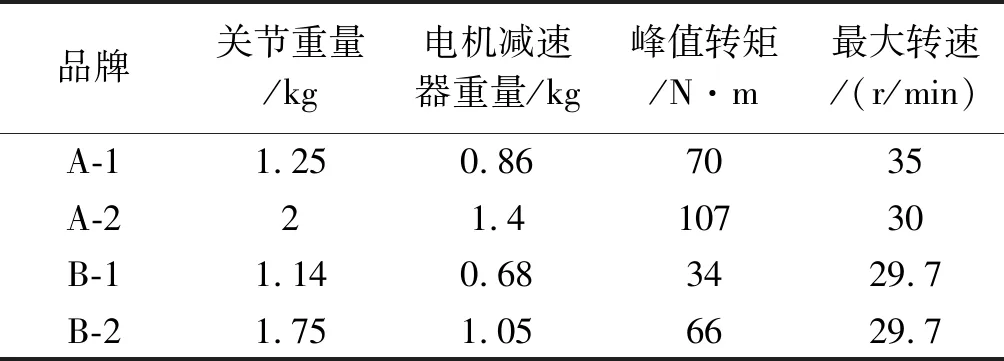
表1 A和B兩款關(guān)節(jié)的型號(hào)和性能參數(shù)
4.1 選型實(shí)例
對(duì)于A-1型號(hào)的關(guān)節(jié),筆者將設(shè)計(jì)指標(biāo)代入到優(yōu)化函數(shù)中,得到了A-1性能指標(biāo)選型結(jié)果,如圖7所示。
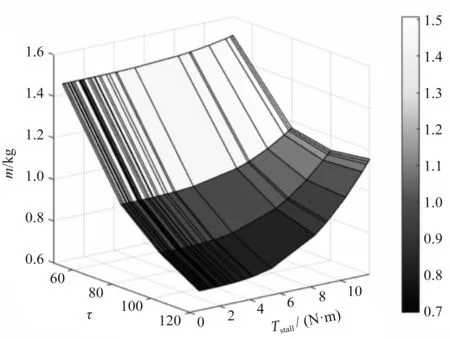
圖7 A-1性能指標(biāo)選型結(jié)果
電機(jī)和減速器組合最小重量為0.7 kg,減速比τ=120,Tstall=0.6。
因此,筆者選擇的電機(jī)型號(hào)為TBSM85-07B40,重量為0.26 kg;減速器的型號(hào)為CSD-32-120,重量為0.51 kg。實(shí)際電機(jī)和減速器總重量為0.77 kg,實(shí)際結(jié)果與基于尺度律的模型的預(yù)測(cè)結(jié)果緊密匹配,從而進(jìn)一步驗(yàn)證了該方法的準(zhǔn)確性。
同時(shí),通過(guò)優(yōu)化選型得到的結(jié)果與原始的設(shè)計(jì)重量0.86 kg相比,重量減輕了約7%。
A-2型號(hào)的性能指標(biāo)選型結(jié)果如圖8所示。
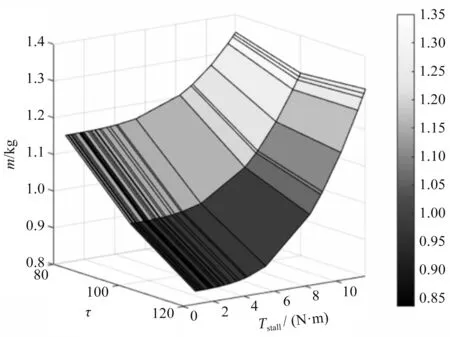
圖8 A-2性能指標(biāo)選型結(jié)果
電機(jī)和減速器組合最小重量為0.83 kg,減速比τ=120,Tstall=1.13。
筆者實(shí)際選擇的電機(jī)的型號(hào)為TBM6051-A,重量為0.55 kg;減速器的型號(hào)為CSF-25-120,重量為0.51 kg。實(shí)際電機(jī)和減速器的總重量為1.06 kg,相較于原來(lái)的設(shè)計(jì),重量減輕了約30%。
對(duì)于B廠家而言,兩個(gè)型號(hào)的關(guān)節(jié)選型結(jié)果如下:
B-1性能指標(biāo)選型結(jié)果如圖9所示。
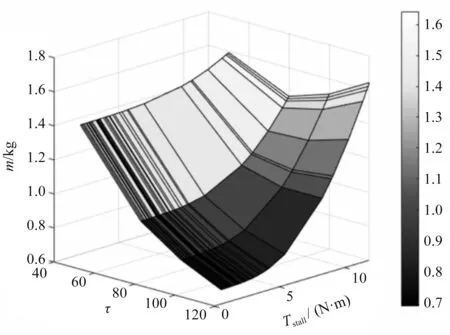
圖9 B-1性能指標(biāo)選型結(jié)果
B-2性能指標(biāo)選型結(jié)果如圖10所示。
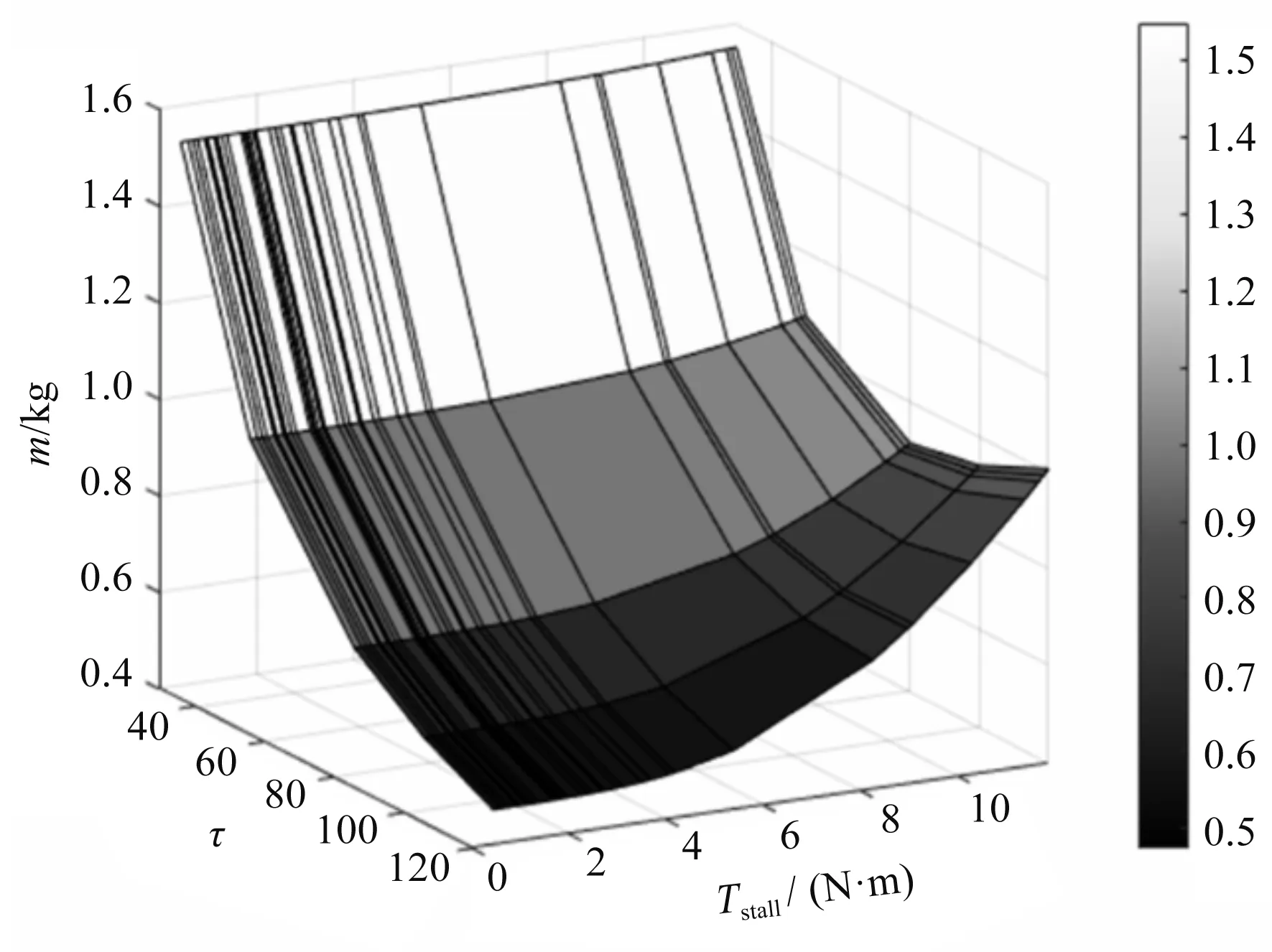
圖10 B-2性能指標(biāo)選型結(jié)果
其選型得到的組合重量都比原設(shè)計(jì)重量減少了約20%~30%,從而驗(yàn)證了該方法的有效性。
4.2 選型試驗(yàn)
為進(jìn)一步驗(yàn)證該選型方法的有效性,參照科爾摩根(Koll morgen)的RGM17-100協(xié)作機(jī)器人關(guān)節(jié)模組,筆者進(jìn)行了電機(jī)和諧波減速器的選型,并完成了關(guān)節(jié)模組設(shè)計(jì)。
關(guān)節(jié)模組性能參數(shù)表如表2所示。

表2 關(guān)節(jié)模組性能參數(shù)
根據(jù)基于尺度律的優(yōu)化選型方法,依照表2所示性能參數(shù),筆者進(jìn)行了關(guān)節(jié)模組電機(jī)和諧波減速器選型.選型結(jié)果為:電機(jī)型號(hào)為河北宇捷TBSM76-15A31,重量為0.5 kg.
關(guān)節(jié)模組用無(wú)框力矩電機(jī)實(shí)物如圖11所示。
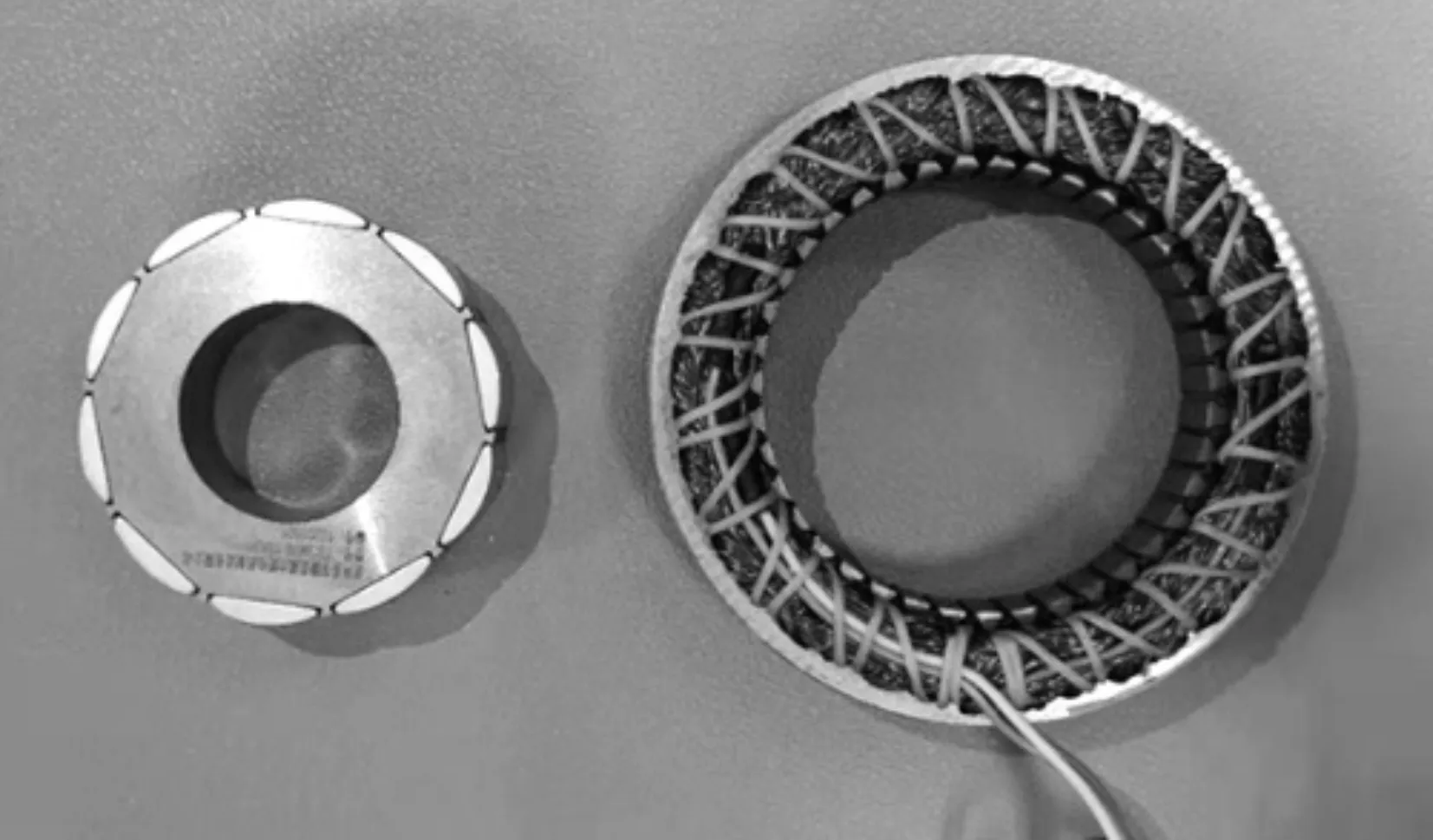
圖11 關(guān)節(jié)模組用無(wú)框力矩電機(jī)
諧波減速器型號(hào)為L(zhǎng)HSG-III-17-100,重量為0.8 kg,其實(shí)物圖如圖12所示。

圖12 關(guān)節(jié)模組用諧波減速器
筆者設(shè)計(jì)的關(guān)節(jié)模組與科爾摩根RGM17-100電機(jī)和減速器重量對(duì)比結(jié)果,如表3所示。
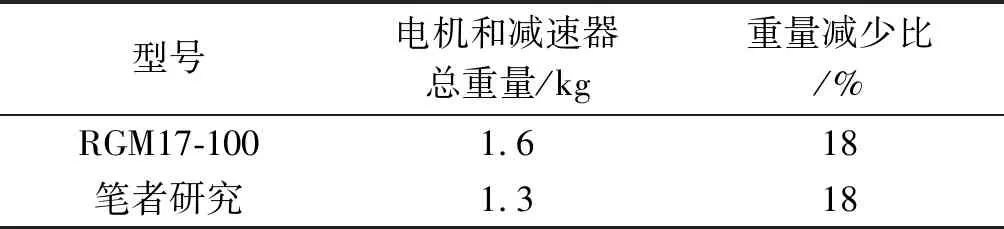
表3 選型結(jié)果與RGM17-100對(duì)比
由表3可知:相較于原始設(shè)計(jì),使用基于尺度律的選型方法得到的電機(jī)和減速器總重量減少了約18%,驗(yàn)證了該方法可以有效地減少電機(jī)和減速器總重量。
筆者在完成關(guān)節(jié)模組其他部件的設(shè)計(jì)選型后,最終完成了關(guān)節(jié)模組的設(shè)計(jì)。
關(guān)節(jié)模組的實(shí)物圖如圖13所示。

圖13 關(guān)節(jié)模組實(shí)物圖
5 結(jié)束語(yǔ)
為了實(shí)現(xiàn)協(xié)作機(jī)器人的輕量化設(shè)計(jì)目標(biāo),筆者提出了一種基于尺度律的協(xié)作機(jī)器人關(guān)節(jié)傳動(dòng)系統(tǒng)優(yōu)化選型方法。具體選型步驟如下:
1)建立協(xié)作機(jī)器人關(guān)節(jié)傳動(dòng)系統(tǒng)的動(dòng)態(tài)模型,根據(jù)模型確立了電機(jī)和減速器的選擇條件;2)建立以電機(jī)和減速器重量最小化為目標(biāo)的優(yōu)化函數(shù),并使用尺度律對(duì)優(yōu)化函數(shù)進(jìn)行簡(jiǎn)化;3)通過(guò)仿真實(shí)驗(yàn)和實(shí)際試驗(yàn),對(duì)該方法的有效性進(jìn)行驗(yàn)證。根據(jù)選型結(jié)果,最終完成了關(guān)節(jié)的設(shè)計(jì)任務(wù)。
研究結(jié)果表明:
1)在仿真實(shí)驗(yàn)中,筆者使用該方法對(duì)市面上銷售的4款關(guān)節(jié)的性能參數(shù)進(jìn)行了選型,選型得到的電機(jī)和減速器的總重量比關(guān)節(jié)的原始設(shè)計(jì)減輕了20%,驗(yàn)證了該選型方法的有效性;
2)在實(shí)際試驗(yàn)中,筆者參照科爾摩根的RGM17-100關(guān)節(jié)的性能參數(shù),使用該選型方法得到了電機(jī)和減速器的重量,其比原始設(shè)計(jì)的重量減輕了18%,從而進(jìn)一步驗(yàn)證了該選型方法的有效性。
在后續(xù)的研究工作中,筆者將會(huì)使用基于尺度律的選型方法進(jìn)行不同關(guān)節(jié)性能參數(shù)的實(shí)際試驗(yàn),以進(jìn)一步提高選型方法的可靠性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03