基于參數(shù)辨識的比例閥非線性摩擦自適應補償控制方法*
2023-09-22 07:54:50郝云曉
機電工程 2023年9期
王 濤,郝云曉,趙 斌,劉 赫
(太原理工大學 新型傳感器與智能控制教育部與山西省重點實驗室,山西 太原 030024)
0 引 言
研究人員將液壓技術、電子技術和自動控制技術相結合,形成了電液比例控制技術[1],這一技術目前已被廣泛應用。電液比例閥由閥體、閥芯、壓力彈簧和比例電磁鐵等組成。
在閥芯的運動過程中,摩擦力等非線性因素嚴重影響比例閥的動靜態(tài)性能。為了消除非線性因素的影響,提高比例閥閥芯位置控制精度和穩(wěn)定性,已有研究人員進行了探索和研究。YANG J J等人[2]從非線性摩擦預測控制方面討論了摩擦的補償和控制方法。肖乃鑫等人[3]從顫振補償角度對比例閥進行了穩(wěn)定性分析。華鐘[4]從摩擦等非線性因素的建模方面進行了研究和仿真分析。
基于模型的補償[5-11]控制是消除摩擦等非線性因素的重要方法。為了得到精確的摩擦名義模型,遺傳算法[12]等模型參數(shù)優(yōu)化方法已經得到了廣泛應用。但當下基于遺傳算法進行參數(shù)辨識的應用大多都是在離線狀態(tài)[13]下進行的。例如,董立紅[14,15]利用PID算法,得到了辨識摩擦力離散序列(作為實際的摩擦力序列),并采用遺傳算法建立目標函數(shù),進行了Stribeck模型辨識。這樣得到的參數(shù)辨識值是常值,而實際系統(tǒng)中的摩擦實際值會因磨損、潤滑等條件變化而變化,使得基于模型補償控制的效果并不佳。
反步設計法[16,17]可以將復雜的非線性系統(tǒng)分解成低階子系統(tǒng),并根據(jù)Lyapunov穩(wěn)定性理論設計中間虛擬控制量,集成整體控制率,自適應補償非線性擾動,使系統(tǒng)的輸出以較高的精度逼近期望信號軌跡;而且,基于反步設計法推導得到的參數(shù)自適應律可以用于對模型參數(shù)進行實時估計。李俊陽等人[18]基于反步設計法和Lyapunov穩(wěn)定性理論,使用模糊神經網絡,設計了一種可實現(xiàn)摩擦補償?shù)哪:赃m應反步控制方法,達到了機器人關節(jié)在摩擦等非線性干擾下的精確和穩(wěn)定控制效果。
因此,針對環(huán)境變化工況下,比例閥內部參數(shù)隨環(huán)境發(fā)生變化,辨識的參數(shù)不能適應工況變化的需求,導致了辨識模型對系統(tǒng)干擾項補償控制效果不佳的問題,筆者提出一種基于反步設計法和遺傳算法相結合的比例閥閥芯非線性摩擦力辨識與補償方法。
筆者通過將反步法結合遺傳算法,設計合適的目標函數(shù),解決參數(shù)自適應律存在未知參數(shù)值的問題,以期實現(xiàn)對所有待辨識參數(shù)的準確估計目的;并采用自適應控制,消除非線性摩擦對比例閥位移控制特性的影響,以期對比例閥閥芯位移進行精確控制。
1 直動式比例閥原理與建模
直動式比例換向閥主要由復位彈簧、閥套、閥芯、比例電磁鐵、放大器、位置傳感器等組成。從裝配關系上看,閥芯兩端與彈簧和比例電磁鐵推桿相接觸,為同軸關系。
工作過程中,閥芯會受到電磁力、彈簧力、液動力及摩擦力等作用。當在控制端輸入控制信號時,經放大器放大處理后,加載到比例電磁鐵,使其產生與控制信號成比例的電磁推力,推動閥芯產生與控制信號成比例的位移。
為了消除閥中普遍存在的干擾力,輸出信號會通過反饋元件(傳感器)傳遞到信號輸入端,以此形成位移閉環(huán),以實現(xiàn)對閥芯位置及輸出流量的控制。
比例閥閥芯控制示意圖如圖1所示。
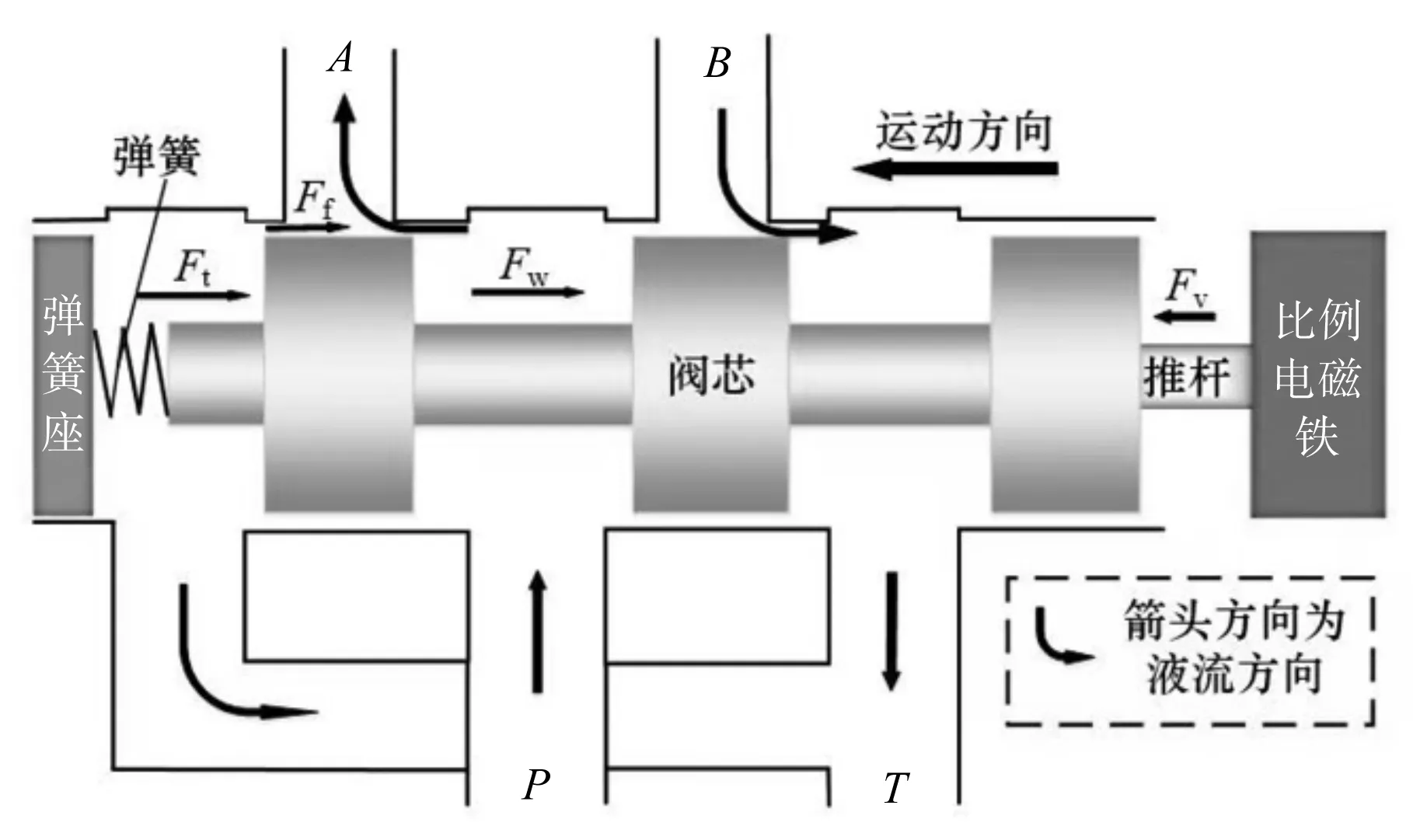
圖1 比例閥閥芯控制示意圖
圖1中,筆者忽略彈簧阻尼的影響,將閥芯閥套間的黏性阻尼及瞬態(tài)液動力黏性阻尼視為摩擦力。
直動式比例閥動力學方程線性化后的表達式為:
(1)

筆者采用Stribeck模型對摩擦模型進行研究,表達式如下:
(2)

令Fv的控制量為u,可得比例閥動力學方程為:
(3)
2 基于參數(shù)辨識的聯(lián)合算法
比例閥內部環(huán)境具有復雜性,且摩擦等干擾項具有非線性,基于固定參數(shù)的模型補償控制并不能改善閥的性能。
因此,筆者建立一種基于反步法和遺傳算法,可進行參數(shù)辨識和自適應控制閥芯位移,可消除摩擦干擾的聯(lián)合算法。
聯(lián)合算法設計流程圖如圖2所示。
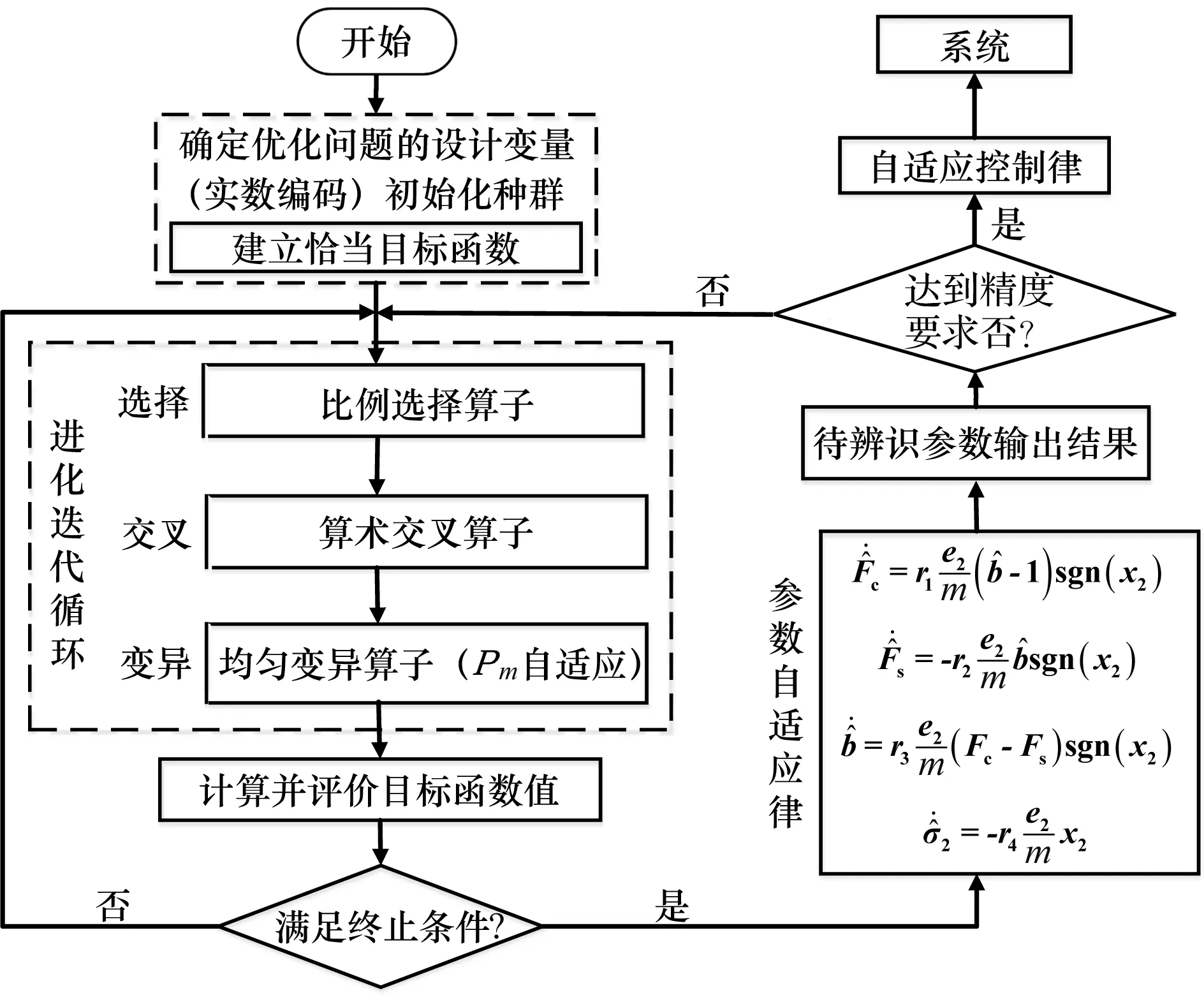
圖2 聯(lián)合算法流程
2.1 參數(shù)辨識及控制原理
根據(jù)芭芭拉(Barbalat)引理,隨著時間t→∞,在基于反步法設計的自適應控制下,系統(tǒng)實際位移會漸進收斂于期望位移。筆者利用Lyapunov穩(wěn)定性理論,設計虛擬控制量,遞推得到控制律和參數(shù)自適應律。
由于參數(shù)自適應律存在未知參數(shù)值的問題,故而筆者提出結合遺傳算法的方法,利用遺傳算法選擇、交叉、變異等系列進化機理,對待辨識參數(shù)最優(yōu)解的自適應進行搜索;并在線估計所有待辨識參數(shù),消除非線性摩擦對閥的影響,進而實現(xiàn)對比例閥閥芯位移的自適應控制目的。
聯(lián)合算法設計步驟如下:
首先計算偏置電流與位移的關系。綜合考慮彈簧力與液動力的影響[19],簡化動力學方程,建立比例閥系統(tǒng)的狀態(tài)空間方程:
(4)
式中:x1為閥芯實際位移;x2為閥芯實際速度。
1)定義位置跟蹤誤差e1
e1方程式如下:
e1=x1-x1d
(5)
式中:x1d為期望位移,驗證位置誤差e1能夠漸進穩(wěn)定于零。
選取Lyapunov函數(shù)V1,表示如下:
(6)
對上式進行微分可得:
(7)

(8)
可得到虛擬控制量x2d如下:
(9)

2)定義速度跟蹤誤差e2
e2方程式如下:
(10)
為驗證位置誤差e1和速度誤差e2能夠漸進穩(wěn)定于零,筆者選取Lyapunov函數(shù)V2,表示如下:
(11)
對上式進行微分可得:

(12)
(13)
經過計算分析,可得控制器自適應控制律如下:
(14)
式中:k2為大于零的設計常數(shù)。
式(9)中,由于參數(shù)Fc、Fs、σ2及Vs為未知量,又因為參數(shù)Vs存在于指數(shù)函數(shù)中,為了進一步得到控制器的自適應控制律和參數(shù)Vs的自適應律,令:
(15)
那么自適應控制律為:
(16)
式中:k1,k2為設計常數(shù),且大于零。

為使誤差能夠漸進穩(wěn)定于零,筆者選取閉環(huán)系統(tǒng)的Lyapunov函數(shù)V3,表示如下:
(17)
式中:r1,r2,r3,r4為參數(shù)的自適應增益,且皆大于0,可采用手工調校的方法進行選定[16]。
在實際工程中,比例閥系統(tǒng)運行工況會發(fā)生變化,為補償閥的性能,可利用模糊控制對參數(shù)的自適應增益進行自適應調整[20]。
對式(17)進行微分可得:
(18)

(19)
參數(shù)估計的自適應律如下:
(20)
式中:Fc,Fs為待辨識參量,且與其他參數(shù)耦合在一起。
根據(jù)Lyapunov-like引理,參數(shù)估計的自適應律為式(20)時,設計中的位置誤差e1和速度誤差e2能夠漸進穩(wěn)定于零,系統(tǒng)全局漸進穩(wěn)定。
為將參數(shù)自適應律中的各個參數(shù)解耦,令Fs-Fc=a,設定其為遺傳算法辨識參數(shù),且待辨識參數(shù)a的搜索范圍為:a∈[0,1]。筆者采用仿真的方法,對比辨識出的參數(shù)值和給定參數(shù)值,以檢驗此種辨識方式的精確程度[21]。
筆者首先忽略閥芯運動正反方向的微小差異,給定Stribeck摩擦模型參數(shù)實際值:Fc=0.45 N,Fs=0.75 N,Vs=0.58 m/s,σ2=0.12 Ns/m。
假設實際摩擦力為F,辨識摩擦力為Fiden,實際Fs-Fc為a,辨識值為aiden,則定義辨識參數(shù)的誤差為:
e4(k)=a(k)-aiden(k)
(21)
定義摩擦力的誤差為:
e5(k)=F(k)-Fiden(k)
(22)
筆者將a與aiden作比較,摩擦力F和實際摩擦力Fiden作比較,建立遺傳算法的目標函數(shù)如下:
(23)
辨識目標是使目標函數(shù)J極小化,對遺傳算法部分,筆者采用浮點數(shù)編碼方式,選擇操作部分采用比例選擇算子,交叉操作部分采用算術交叉算子,變異操作部分采用均勻變異算子。
交叉概率為Pc=0.9,變異概率為:
Pm(g)=0.1-(0.1-0.001)g/G
(24)
式中:g為當前遺傳代數(shù);G為最大遺傳代數(shù)。
2.2 Simulink平臺搭建與參數(shù)設置
為實現(xiàn)模型參數(shù)的在線辨識,筆者利用Sim函數(shù),進行遺傳算法和Simulink聯(lián)合交互仿真。
根據(jù)上述分析,筆者在MATLAB/Simulink環(huán)境中,搭建仿真系統(tǒng)以驗證該方案的可行性。
MATLAB/Simulink控制框圖如圖3所示。
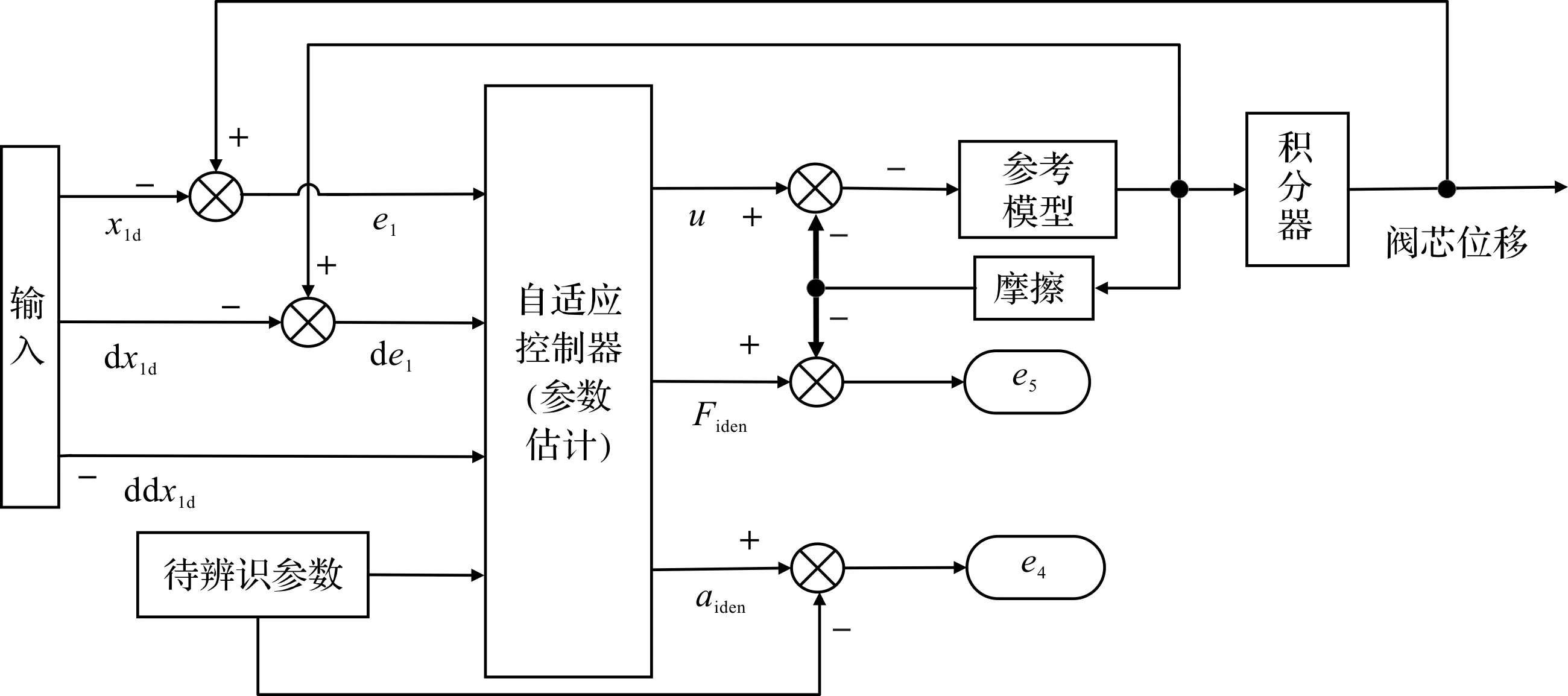
圖3 MATLAB/Simulink控制框圖
筆者給定該次仿真的輸入信號為頻率0.2 Hz的正弦信號,使用ode3作為求解器。
為避免采用Simulink中微分器模塊造成的差異問題,筆者利用S-function模塊編寫輸入信號,并通過不斷測試,設置控制器中增益k1=50,k2=6.7,參數(shù)自適應增益r1=0.777,r2=295,r3=0.049,r4=0.1。
2.3 參數(shù)辨識結果分析
筆者采用MATLAB程序在線辨識Stribeck模型參數(shù),其目標函數(shù)值迭代收斂過程如圖4所示。
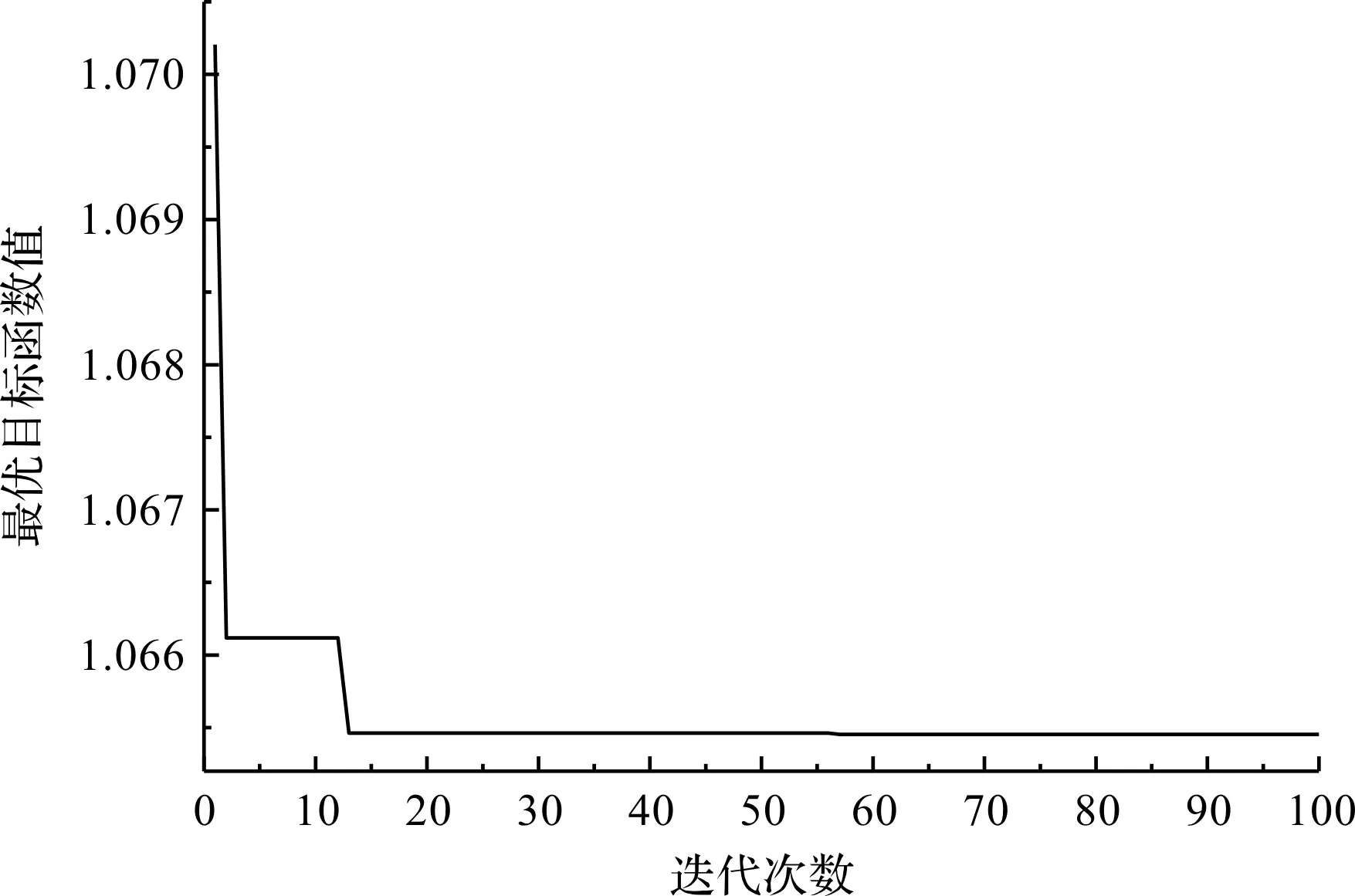
圖4 目標函數(shù)值的迭代優(yōu)化曲線
由圖4中的迭代曲線可知:隨著進化代數(shù)的增加,遺傳算法目標函數(shù)很快收斂于最優(yōu)樣本BestS=0.291 3,最優(yōu)目標函數(shù)值為BestJ=1.065 5。最優(yōu)目標函數(shù)值越接近于0,說明辨識值越接近真實值,參數(shù)辨識優(yōu)化效果越好。
為了更好說明辨識方法的準確性,筆者將參數(shù)辨識值與參數(shù)實際值進行比較,其結果如表1所示。
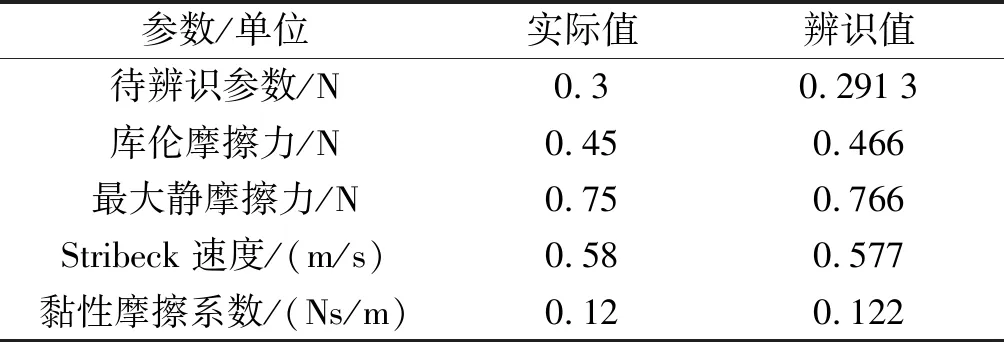
表1 實際值與辨識值比較
在遺傳算法的迭代過程中,由于參數(shù)自適應律中存在誤差e2,會使模型參數(shù)的辨識值最終穩(wěn)定在實際值附近,并存在較小波動。
參數(shù)辨識結果如圖5所示。
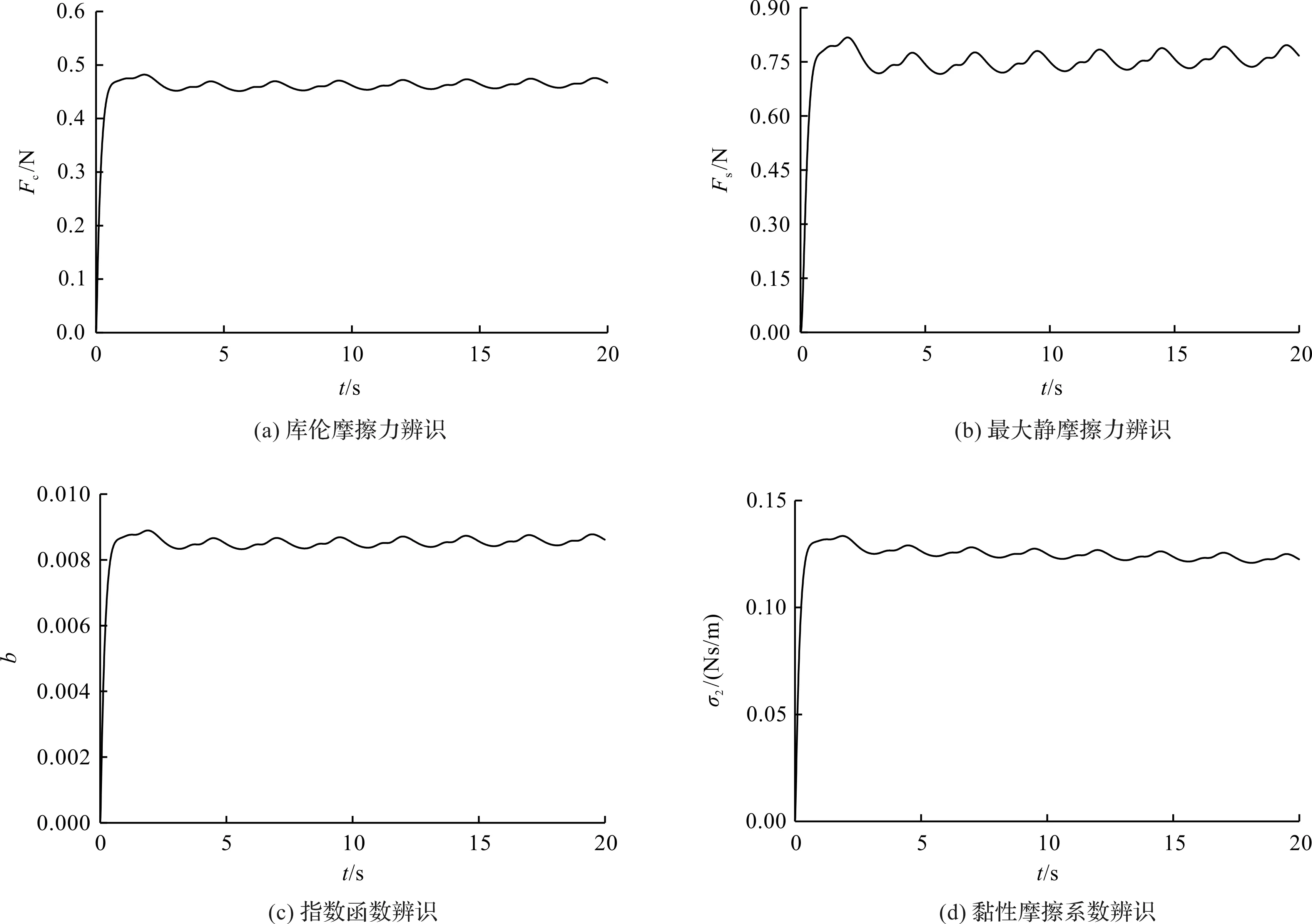
圖5 參數(shù)辨識結果
由圖5可知:參數(shù)實際值與辨識值誤差很小,辨識結果與實際值基本相同,驗證了基于參數(shù)辨識的自適應控制方法的準確性和可行性。
當工況發(fā)生變化時,摩擦力的大小會隨之發(fā)生變化。為證明上述方法的有效性,筆者設定摩擦力分別取較小值和較大值。
摩擦力取較小時,辨識結果與原始參數(shù)的對比結果如表2所示。
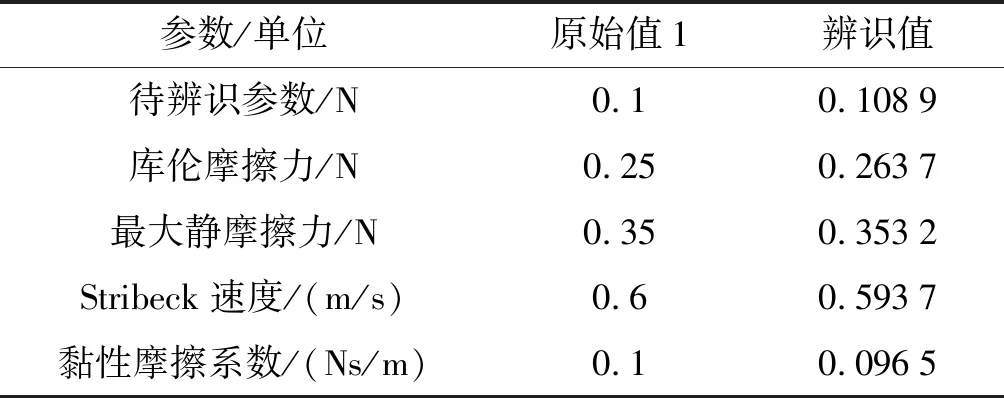
表2 摩擦力取較小時的對比結果
摩擦力取較大時,辨識結果與原始參數(shù)的對比結果如表3所示。
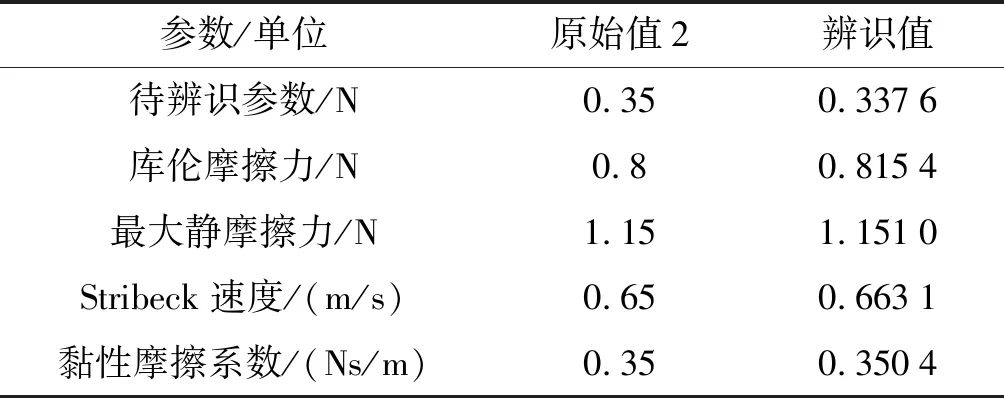
表3 摩擦力取較大時的對比結果
對比表2和表3結果可以看出:當工況變化時,結合反步法和遺傳算法的基于參數(shù)辨識的自適應控制方法,可在摩擦力變化時仍然具有高的辨識準確度。
2.4 控制結果分析
根據(jù)上述所提聯(lián)合控制算法,筆者基于參數(shù)辨識摩擦名義模型,對摩擦干擾進行了自適應補償,并采用仿真平臺,測試上述聯(lián)合控制算法對比例閥閥芯位移的控制效果。
遺傳算法整定PID控制(GAPID)和基于反步設計法、遺傳算法的聯(lián)合控制算法控制下,比例閥閥芯位移正弦位移信號跟蹤特性曲線,如圖6所示。
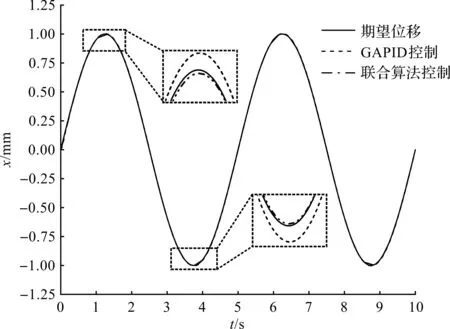
圖6 0.2 Hz正弦信號位移跟蹤
由圖6可知:采用GAPID控制器[22]和基于反步設計法、遺傳算法的聯(lián)合控制算法對系統(tǒng)進行位置跟蹤控制時,由于筆者設計算法的輸入誤差為實際與期望之差,GAPID控制輸入誤差與筆者所設計的聯(lián)合算法的輸入誤差相反。因此,根據(jù)誤差絕對值的比較,可知采用筆者所設計的聯(lián)合算法控制軌跡較GAPID控制軌跡跟蹤偏差更小。
由此可見,在閥芯非線性摩擦力的影響下,筆者設計的反步控制器具有較高的自適應能力,可獲得較高的比例閥閥芯位移控制精度。
3 實驗及結果分析
為驗證該控制算法的可行性,筆者搭建了比例閥特性測試平臺。
筆者采用規(guī)格為NG6的直動式比例換向閥,利用其控制器硬件檢測閥芯位移與電磁鐵電流信號。在dSPACE 1103快速控制原型系統(tǒng)中,筆者搭建基于反步設計法和遺傳算法的聯(lián)合控制算法程序,對比例閥進行信號采集與控制。
比例閥特性實驗測試平臺如圖7所示。
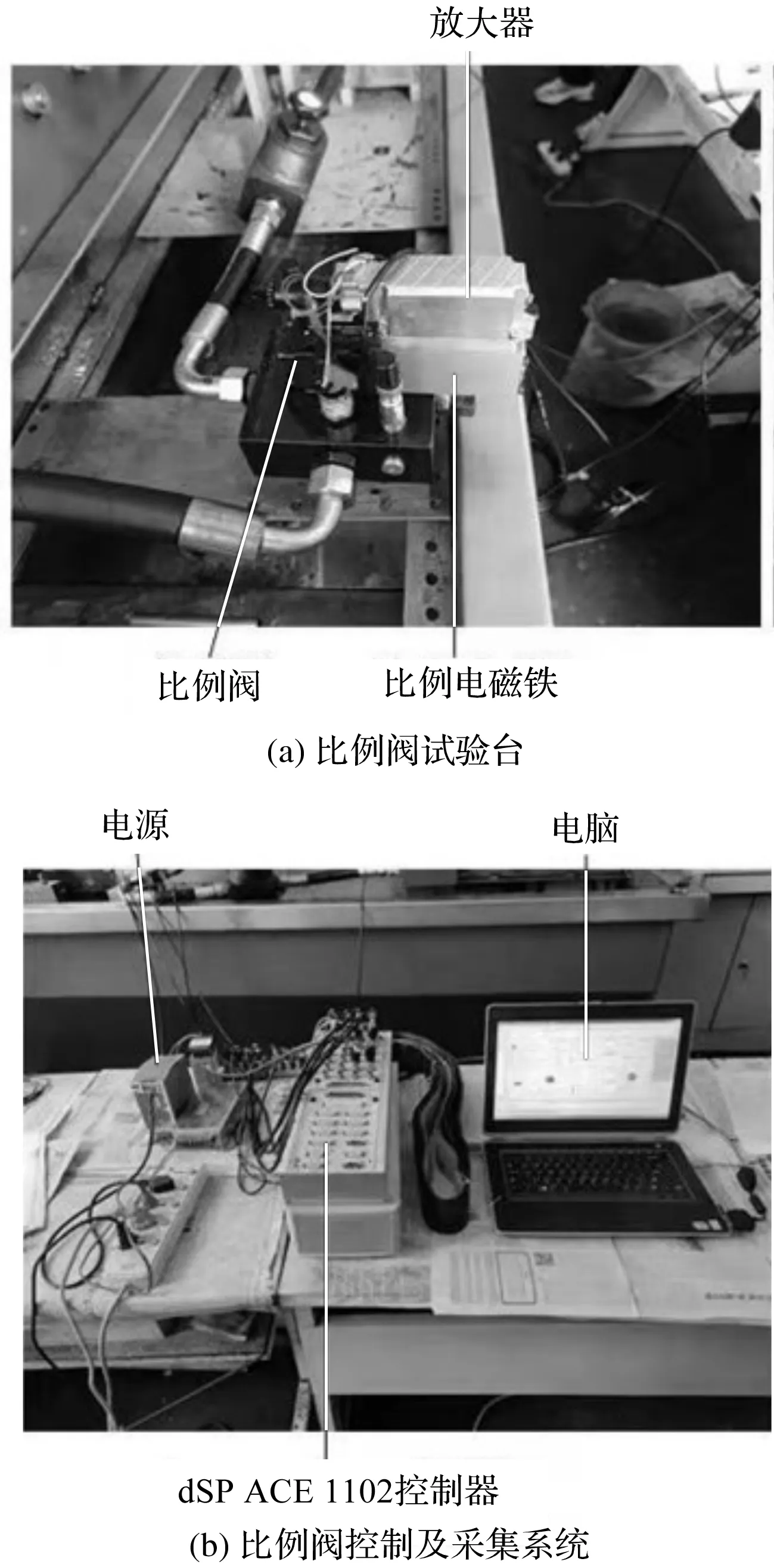
圖7 比例閥特性實驗測試平臺
3.1 階躍響應性能分析
在實驗中,筆者首先對閥芯位移的階躍響應特性進行了測試。
所設計的比例閥閥芯在-1 mm~1 mm之間運動,相應的位移傳感器的輸出電壓信號為±10 V;閥芯位移控制信號分別設定為2 V、4 V、6 V、8 V、10 V的階躍值,分別對應20%(0.2 mm)、40%(0.4 mm)、60%(0.6 mm)、80%(0.8 mm)和100%(1 mm)的閥芯位移行程。
比例閥閥芯位移的階躍響應特性曲線如圖8所示。
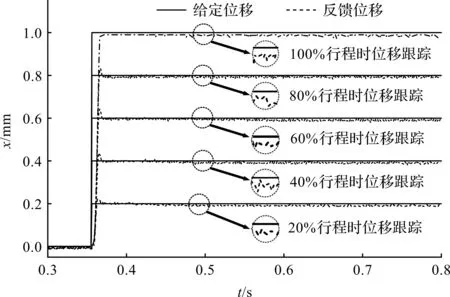
圖8 比例閥階躍響應特性
由圖8可知:比例閥在自適應控制下的開啟時間約為10 ms,動態(tài)響應快,且閥芯位移基本無超調和波動,控制效果良好。
3.2 正弦響應性能分析
為研究比例閥閥芯正負行程的控制效果,筆者根據(jù)正弦信號跟蹤測試了比例閥閥芯的位移跟蹤特性。
筆者采用基于參數(shù)辨識的自適應控制方法(結合反步法和遺傳算法)時,得到的比例閥閥芯對正弦信號的跟蹤曲線,如圖9所示。
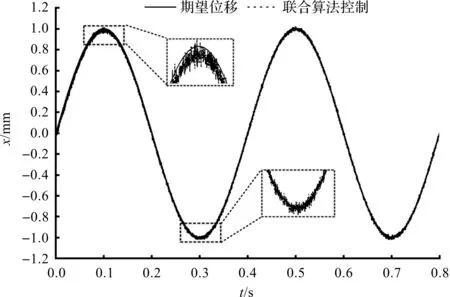
圖9 正弦信號輸出位移跟蹤
圖9中,正弦跟蹤特性測試閥芯位移變化范圍為-1 mm~1 mm。測試曲線可全面反應比例閥動態(tài)響應特性。
由圖9可知:采用基于參數(shù)辨識的自適應控制方法(結合反步法和遺傳算法),比例閥閥芯位移曲線可基本跟隨設定信號進行變化,未出現(xiàn)較大的位移滯后和位移超調量,且閥芯基本無震蕩。
由此可見,采用基于參數(shù)辨識的自適應控制方法(結合反步法和遺傳算法),在非線性摩擦力影響下,閥芯具有較高的自適應補償能力,獲得了較高的閥芯位移控制精度。
4 結束語
結合反步法和遺傳算法,筆者提出了基于參數(shù)辨識的摩擦補償自適應控制方法,對比例閥閥芯非線性摩擦力進行了在線辨識與自適應補償,并采用仿真及實驗的方式,驗證了基于參數(shù)辨識的自適應控制方法的有效性。
研究結果表明:
1)針對環(huán)境變化的工況,采用基于參數(shù)辨識的自適應控制方法,可對比例閥中摩擦干擾力參數(shù)進行在線辨識,參數(shù)辨識精度約在97%,可確定精確的摩擦名義模型;
2)經實驗驗證,結果表明,在保證較高精度的參數(shù)辨識情況下,基于參數(shù)辨識的自適應控制方法,可以實現(xiàn)閥芯摩擦力自適應補償目的,消除了閥芯非線性摩擦影響。閥芯位移實際曲線可基本跟隨設定曲線進行變化,位置跟蹤誤差可基本保持在1%以內,并獲得了良好的動靜態(tài)特性和較高的閥芯位移控制精度。
在后續(xù)研究中,筆者將在基于參數(shù)辨識的自適應控制方法(結合反步法和遺傳算法)的基礎上,利用模糊控制等智能控制算法,對參數(shù)進行在線調整,使得上述控制方法能夠更加滿足實際工況的需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00