考慮執(zhí)行機(jī)構(gòu)故障的運(yùn)載火箭自適應(yīng)滑模容錯(cuò)控制
2023-09-22 12:44:18王培生屈東揚(yáng)冉茂鵬董朝陽
宇航學(xué)報(bào) 2023年8期
王培生,屈東揚(yáng),冉茂鵬,董朝陽
(1. 北京航空航天大學(xué)航空科學(xué)與工程學(xué)院,北京 100191;2. 北京航空航天大學(xué)自動(dòng)化科學(xué)與電氣工程學(xué)院,北京 100191;3. 中關(guān)村實(shí)驗(yàn)室,北京 100094)
0 引 言
大型運(yùn)載火箭對(duì)于空間站建設(shè)、深空探測(cè)等任務(wù)具有不可替代的作用,例如美國的土星系列運(yùn)載火箭和中國的長(zhǎng)征五號(hào)系列運(yùn)載火箭等[1-2]。大型運(yùn)載火箭作為一個(gè)復(fù)雜龐大的系統(tǒng),其所處飛行環(huán)境惡劣多變,致使其極易發(fā)生故障,進(jìn)而導(dǎo)致發(fā)射任務(wù)失敗。控制系統(tǒng)作為大型運(yùn)載火箭極為重要的子系統(tǒng),其設(shè)計(jì)的一個(gè)重要挑戰(zhàn)是如何在存在內(nèi)部未建模動(dòng)態(tài)、外部不確定性干擾及執(zhí)行機(jī)構(gòu)故障的情況下保證運(yùn)載火箭仍具有較好的指令跟蹤性能,最大程度保證任務(wù)完成[3-4]。
滑模控制因具有快速響應(yīng)、對(duì)參數(shù)變化及擾動(dòng)不靈敏、無需系統(tǒng)在線辨識(shí)、物理實(shí)現(xiàn)簡(jiǎn)單等優(yōu)點(diǎn),廣泛應(yīng)用于航空航天控制領(lǐng)域[5-7]。文獻(xiàn)[8]采用自適應(yīng)和滑模變結(jié)構(gòu)控制設(shè)計(jì)了一種容錯(cuò)穩(wěn)定控制器維持執(zhí)行機(jī)構(gòu)故障下運(yùn)載火箭姿態(tài)控制系統(tǒng)的穩(wěn)定,保證姿態(tài)跟蹤誤差的有限時(shí)間收斂,并結(jié)合自適應(yīng)動(dòng)態(tài)規(guī)劃方法設(shè)計(jì)智能容錯(cuò)控制器進(jìn)一步優(yōu)化姿態(tài)控制系統(tǒng)的跟蹤性能。文獻(xiàn)[9]針對(duì)存在未知外部干擾和執(zhí)行機(jī)構(gòu)卡死故障的運(yùn)載火箭,提出了一種基于非奇異終端滑模面的姿態(tài)跟蹤控制算法。文獻(xiàn)[10]引入一種有限時(shí)間擾動(dòng)觀測(cè)器估計(jì)擾動(dòng),并提出了一種非奇異終端反饋控制器組成的復(fù)合控制器,解決了具有外部干擾和慣性不確定性的剛性航天器系統(tǒng)有限時(shí)間姿態(tài)跟蹤控制問題。文獻(xiàn)[11]提出了一種新型滑模面,并結(jié)合PID的優(yōu)點(diǎn)和傳統(tǒng)非奇異終端滑模控制器的良好性能,增強(qiáng)了容錯(cuò)控制的魯棒性并降低了穩(wěn)態(tài)誤差。文獻(xiàn)[12]針對(duì)具有未知外部干擾的TS模糊系統(tǒng),設(shè)計(jì)了一種基于擾動(dòng)觀測(cè)器的自適應(yīng)滑模控制方法,通過對(duì)干擾估計(jì)進(jìn)行補(bǔ)償實(shí)現(xiàn)了對(duì)TS模糊系統(tǒng)的控制。
另一方面,在抗擾動(dòng)控制中,擴(kuò)張狀態(tài)觀測(cè)器可以估計(jì)未知干擾和系統(tǒng)故障,并根據(jù)觀測(cè)器的輸出在控制器中進(jìn)行實(shí)時(shí)反饋補(bǔ)償以解決控制問題,因其可以對(duì)未知非線性系統(tǒng)進(jìn)行狀態(tài)估計(jì),對(duì)已知的系統(tǒng)信息要求較少,可以視為一種弱模型的方法[13-17]。文獻(xiàn)[18]提出了一種基于擴(kuò)張狀態(tài)觀測(cè)器的四旋翼吊掛負(fù)載擺動(dòng)抑制非線性軌跡跟蹤控制方法,在考慮系統(tǒng)存在未知外界擾動(dòng)和模型動(dòng)態(tài)不確定的情況下,實(shí)現(xiàn)了四旋翼吊掛系統(tǒng)軌跡跟蹤的精確控制和飛行過程中負(fù)載擺動(dòng)的快速抑制。文獻(xiàn)[19]使用迭代學(xué)習(xí)與未知輸入觀測(cè)器相結(jié)合的魯棒容錯(cuò)控制方法,實(shí)現(xiàn)了衛(wèi)星姿態(tài)系統(tǒng)執(zhí)行機(jī)構(gòu)故障的在線重構(gòu)。文獻(xiàn)[20]研究了用滑模觀測(cè)器估計(jì)時(shí)延系統(tǒng)狀態(tài)和故障的問題,通過適當(dāng)?shù)南到y(tǒng)變換和濾波提出了一種新的能準(zhǔn)確估計(jì)系統(tǒng)狀態(tài)和故障的滑模面。文獻(xiàn)[21]針對(duì)傳統(tǒng)擴(kuò)張狀態(tài)觀測(cè)器在階數(shù)過高時(shí)的高增益問題,設(shè)計(jì)了一種新型級(jí)聯(lián)降階擴(kuò)張狀態(tài)觀測(cè)器,降低了傳統(tǒng)擴(kuò)張狀態(tài)觀測(cè)器的峰化現(xiàn)象,對(duì)系統(tǒng)不確定性具有更好的估計(jì)和補(bǔ)償能力。
在文獻(xiàn)[12]和文獻(xiàn)[21]的基礎(chǔ)上,本文針對(duì)存在內(nèi)部未建模動(dòng)態(tài)、外部不確定性干擾等情況時(shí),運(yùn)載火箭發(fā)生執(zhí)行機(jī)構(gòu)故障的問題,設(shè)計(jì)了一種基于級(jí)聯(lián)降階擴(kuò)張狀態(tài)觀測(cè)器的自適應(yīng)滑模控制器。主要?jiǎng)?chuàng)新點(diǎn)如下:1)在控制器設(shè)計(jì)時(shí),同時(shí)考慮內(nèi)部未建模動(dòng)態(tài)、外部不確定性干擾等,以及執(zhí)行器故障可能引起的系統(tǒng)模型變化;2)所設(shè)計(jì)的級(jí)聯(lián)降階擴(kuò)張狀態(tài)觀測(cè)器能夠?qū)τ^測(cè)器狀態(tài)進(jìn)行飽和設(shè)置,避免因觀測(cè)器峰化現(xiàn)象導(dǎo)致整個(gè)閉環(huán)系統(tǒng)不穩(wěn)定;3)所設(shè)計(jì)的自適應(yīng)控制律包含對(duì)觀測(cè)器干擾估計(jì)誤差的上界信息,同時(shí),消除了控制輸入的抖振現(xiàn)象,能夠?qū)崿F(xiàn)固定時(shí)間收斂并具有較好的指令跟蹤性能。
1 系統(tǒng)動(dòng)力學(xué)模型
1.1 運(yùn)載火箭姿態(tài)控制系統(tǒng)模型
運(yùn)載火箭的動(dòng)力系統(tǒng)主要由4臺(tái)助推發(fā)動(dòng)機(jī)(S1~S4)和4臺(tái)芯級(jí)發(fā)動(dòng)機(jī)(C1~C4)構(gòu)成,布局如圖1所示的“十”字,其中黃色噴管為固定噴管,其它為擺動(dòng)噴管。發(fā)動(dòng)機(jī)擺動(dòng)方向如圖1中箭頭所示,其中4臺(tái)助推發(fā)動(dòng)機(jī)作單向擺動(dòng),C2, C4, S2, S4擺動(dòng)可提供俯仰力矩,C1, C3, S1, S3擺動(dòng)可提供偏航力矩,所有發(fā)動(dòng)機(jī)聯(lián)合擺動(dòng)可提供滾轉(zhuǎn)力矩。Rs表示助推發(fā)動(dòng)機(jī)到火箭中心軸線的距離;Rc表示芯級(jí)發(fā)動(dòng)機(jī)到火箭中心軸線的距離。根據(jù)等效原理,運(yùn)載火箭發(fā)動(dòng)機(jī)等效擺角關(guān)系為
(1)
(2)

(3)
此時(shí),運(yùn)載火箭的三通道(俯仰、偏航、滾轉(zhuǎn))控制力矩可表示為
τ=Gσ
(4)
式中:σ=δc+δs表示三通道等效擺角;G∈R3×3為等效擺角與控制力矩之間的力矩轉(zhuǎn)換矩陣,其具體形式如下:
G=-Tdiag(4Rs+2Rc,3(Xs-Xm),3(Xs-Xm))
(5)
式中:T表示發(fā)動(dòng)機(jī)推力;Xs表示發(fā)動(dòng)機(jī)噴嘴到火箭頂端的距離;Xm表示火箭質(zhì)心位置。
忽略氣動(dòng)彈性、液體晃動(dòng)等因素影響,運(yùn)載火箭姿態(tài)控制系統(tǒng)模型可表示為[22]
(6)

(7)
ω×表示由向量ω張成的斜對(duì)稱矩陣,具體形式為
(8)
令x1=θ,x2=S(θ)ω,則系統(tǒng)(6)可以轉(zhuǎn)換為如下形式:
(9)
式中:f1(x1,x2)和f2(x1)的具體形式為
(10)
1.2 運(yùn)載火箭執(zhí)行機(jī)構(gòu)故障模型
本文主要考慮執(zhí)行機(jī)構(gòu)故障中最為常見的兩種故障類型:執(zhí)行機(jī)構(gòu)效率損失故障和偏置型故障,執(zhí)行機(jī)構(gòu)的故障模型可表示為如下形式[8]:
σf=Nσ+ρ
(11)

τf=Gσf
(12)
注1.本文將8臺(tái)發(fā)動(dòng)機(jī)的控制問題等效為俯仰、偏航和滾轉(zhuǎn)的三通道控制問題,8臺(tái)發(fā)動(dòng)機(jī)的執(zhí)行機(jī)構(gòu)故障類型通過相應(yīng)的轉(zhuǎn)換,最終均可等效為三通道下的故障模型。因此,文中采用三通道下的故障模型進(jìn)行控制器設(shè)計(jì)具有一定的合理性。同時(shí),本文所考慮的故障問題為有限型故障,由于8臺(tái)發(fā)動(dòng)機(jī)的冗余性,在故障發(fā)生后,等效的三通道執(zhí)行機(jī)構(gòu)依然具有一定的控制能力。
1.3 運(yùn)載火箭姿態(tài)跟蹤系統(tǒng)模型

(13)

(14)

2 基于新型ESO的自適應(yīng)滑模容錯(cuò)控制器設(shè)計(jì)
針對(duì)式(13)所示的指令跟蹤誤差系統(tǒng)的鎮(zhèn)定問題,本文首先設(shè)計(jì)了一種級(jí)聯(lián)降階的線性擴(kuò)張狀態(tài)觀測(cè)器,以對(duì)系統(tǒng)中存在的建模不確定性、外部干擾以及故障函數(shù)等進(jìn)行估計(jì);根據(jù)擴(kuò)張狀態(tài)觀測(cè)器對(duì)系統(tǒng)狀態(tài)以及不確定性和故障函數(shù)的估計(jì),設(shè)計(jì)了一種可獲得干擾估計(jì)誤差上界信息的自適應(yīng)固定時(shí)間收斂滑模控制律,以保證系統(tǒng)的穩(wěn)定性。
2.1 擴(kuò)張狀態(tài)觀測(cè)器設(shè)計(jì)
(15)

為證明擴(kuò)張狀態(tài)觀測(cè)器的收斂性,下面給出幾個(gè)引理和假設(shè)條件。
引理1[21].針對(duì)如下的線性時(shí)變系統(tǒng)
(16)

引理2[21].針對(duì)如下的受擾時(shí)變系統(tǒng)
(17)

假設(shè)1.系統(tǒng)中的狀態(tài)變量e及其導(dǎo)數(shù)有界。
注1.對(duì)于實(shí)際的運(yùn)載火箭系統(tǒng),其執(zhí)行機(jī)構(gòu)如發(fā)動(dòng)機(jī)擺角等均為連續(xù)作動(dòng)器件,同時(shí),其所受到的風(fēng)干擾及結(jié)構(gòu)干擾等均有界,故假設(shè)1和假設(shè)2在實(shí)際工程中是合理的。
定理1.針對(duì)指令跟蹤誤差系統(tǒng)(13)所設(shè)計(jì)的擴(kuò)張狀態(tài)觀測(cè)器(15),若假設(shè)1和假設(shè)2滿足,且系統(tǒng)初始狀態(tài)有界,則對(duì)于任意的λ>0和T>0,總存在ε*>0,使得對(duì)于任意的ε∈(0,ε*),下式均成立
(18)

(19)
η2的動(dòng)態(tài)可以描述為
(20)
式(20)符合引理2中系統(tǒng)(17)的形式,根據(jù)假設(shè)2中e3有界,則由引理2可知對(duì)于任意λ>0及T1∈(0,T),總存在ε1>0,使得對(duì)于任意ε∈(0,ε1)和t∈[T1, ∞),系統(tǒng)的解滿足||η2(t)||≤λε。定理1中i=2的情況得證。
η3的動(dòng)態(tài)可以描述為
(21)
(22)


(23)
此時(shí),η3則可由下式進(jìn)行計(jì)算
(24)

(25)
則可得η3=H3ψ3,因此對(duì)于任意λ>0及T2∈(T1,T),總存在ε2∈(0,ε1],使得對(duì)于任意ε∈(0,ε2)和t∈[T2, ∞),系統(tǒng)(21)滿足||η3(t)||≤λε2。
結(jié)合η2和η3的證明結(jié)果,定理1得證。
2.2 自適應(yīng)滑模容錯(cuò)控制器設(shè)計(jì)
為進(jìn)行控制器設(shè)計(jì),首先引入如下引理。
x(y-x)α≤l1y1+α-l2x1+α
(26)
引理4[23].對(duì)于任意x(t)∈Rn,當(dāng)0
(27)
(28)
引理5[24].考慮如下的動(dòng)態(tài)系統(tǒng)
(29)
式中:x(t)∈Rn為系統(tǒng)狀態(tài),f(x(t)):Rn→Rn為連續(xù)函數(shù)。若存在連續(xù)正定函數(shù)V(x):Rn→R+∪{0}使得下式成立:
(30)
式中:λ1,λ2,m1,m2和k為正實(shí)數(shù)且滿足0
(31)
為保證式(13)所表示的誤差系統(tǒng)收斂至零,設(shè)計(jì)如下的滑模面:
s=e2+ke1
(32)
式中:s=[s1,s2,s3]T∈R3,k>0,則
(33)


(34)

(35)

(36)

定理2.針對(duì)式(13)所示的運(yùn)載火箭指令跟蹤誤差系統(tǒng),在假設(shè)1~3成立的前提下,若采用式(15)所設(shè)計(jì)的擴(kuò)張狀態(tài)觀測(cè)器及式(32)所設(shè)計(jì)的滑模面,當(dāng)控制器設(shè)計(jì)為式(35)所示的滑模控制器,自適應(yīng)律為式(36)時(shí),系統(tǒng)會(huì)在固定時(shí)間內(nèi)收斂至穩(wěn)定狀態(tài)。
證.選取如下的Lyapunov函數(shù):
(37)

對(duì)式(32)求導(dǎo)可得:
(38)
對(duì)式(37)求導(dǎo)并將式(38)代入可得:
(39)


(40)
式中:μ和?i,i=1,2如下所示:

(41)
(42)
(43)
根據(jù)引理5,滑模變量s在固定時(shí)間可收斂到有界區(qū)域,收斂時(shí)間為
(44)
進(jìn)而,通過所設(shè)計(jì)的自適應(yīng)滑模控制律可使得指令跟蹤誤差系統(tǒng)在固定時(shí)間內(nèi)收斂至零。
3 仿真校驗(yàn)
本節(jié)主要通過仿真實(shí)驗(yàn)對(duì)所設(shè)計(jì)的運(yùn)載火箭自適應(yīng)容錯(cuò)控制器進(jìn)行驗(yàn)證,以證明所設(shè)計(jì)控制器在存在執(zhí)行機(jī)構(gòu)故障和外部不確定性干擾等情況時(shí)的有效性。

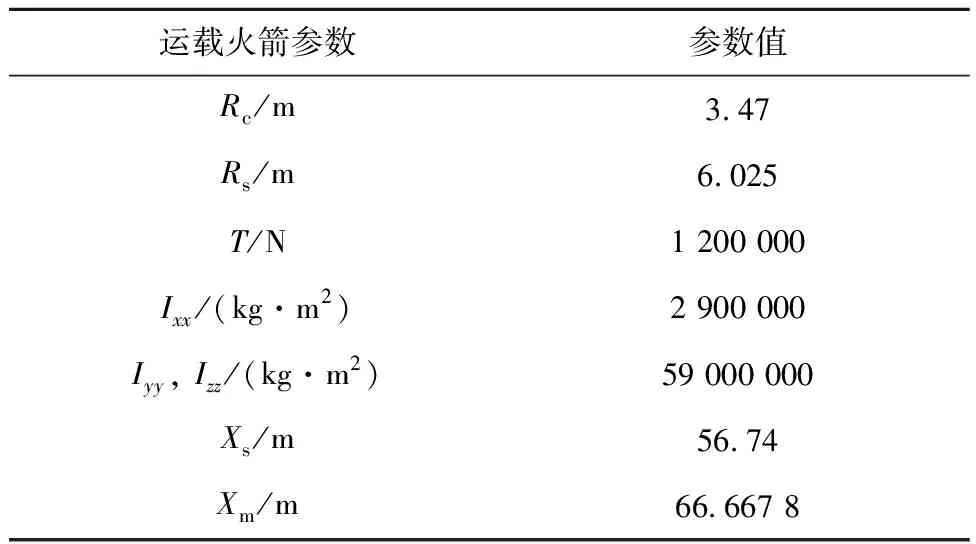
表1 運(yùn)載火箭參數(shù)Table 1 Parameters of the launch vehicle
(45)

為驗(yàn)證所設(shè)計(jì)的自適應(yīng)滑模容錯(cuò)控制器對(duì)執(zhí)行機(jī)構(gòu)不同故障情形及故障類型的有效性和優(yōu)越性,考慮3種不同的故障情形,并將仿真結(jié)果與文獻(xiàn)[9]中所設(shè)計(jì)的自適應(yīng)神經(jīng)網(wǎng)絡(luò)容錯(cuò)控制器進(jìn)行對(duì)比。
3.1 單個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障
針對(duì)較為常見的單一發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障,考慮如下的故障類型:偏置型故障,即當(dāng)t=20 s時(shí)助推發(fā)動(dòng)機(jī)4發(fā)生偏置型故障,偏置量為-2°。
圖2為單個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障下的仿真結(jié)果。圖2(a)為文獻(xiàn)[9]所設(shè)計(jì)控制器的姿態(tài)角跟蹤誤差曲線;圖2(b)為本文所提出控制器的姿態(tài)角跟蹤誤差曲線,圖2(c)為相應(yīng)的三通道控制輸入曲線。根據(jù)發(fā)動(dòng)機(jī)布局分析可知,助推發(fā)動(dòng)機(jī)4發(fā)生故障主要影響滾轉(zhuǎn)和俯仰通道。仿真結(jié)果顯示,滾轉(zhuǎn)和俯仰通道在故障發(fā)生時(shí)產(chǎn)生了較大的跟蹤誤差,相應(yīng)的控制輸入也產(chǎn)生了明顯的變化,仿真結(jié)果與分析相符。同時(shí),文獻(xiàn)[9]及本文方法均能在20 s執(zhí)行機(jī)構(gòu)發(fā)生故障后保證運(yùn)載火箭姿態(tài)控制系統(tǒng)的穩(wěn)定,并實(shí)現(xiàn)較好的控制性能。但在故障發(fā)生后,本文所設(shè)計(jì)的自適應(yīng)滑模容錯(cuò)控制器能夠使指令跟蹤誤差在經(jīng)過短暫的波動(dòng)之后,于4 s內(nèi)收斂至穩(wěn)態(tài)值,且跟蹤誤差在0.1°以內(nèi),相比于文獻(xiàn)[9]具有更快的收斂速度及控制精度,對(duì)指令跟蹤效果較好。

圖2 單發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障仿真結(jié)果Fig.2 Single engine actuator failure
3.2 多個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障
在運(yùn)載火箭執(zhí)行任務(wù)過程中,除單個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)可能發(fā)生故障外,同時(shí)可能存在多個(gè)發(fā)動(dòng)機(jī)發(fā)生故障的情況。針對(duì)可能存在的多個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障,考慮如下故障形式:不同時(shí)刻發(fā)生不同類型故障,即當(dāng)t=20 s時(shí)助推發(fā)動(dòng)機(jī)4和芯級(jí)發(fā)動(dòng)機(jī)1發(fā)生偏置型故障,偏置量分別為-3°和-1°,當(dāng)t=40 s時(shí)助推發(fā)動(dòng)機(jī)2發(fā)生效率損失型故障,損失量為50%。仿真結(jié)果如圖3所示。
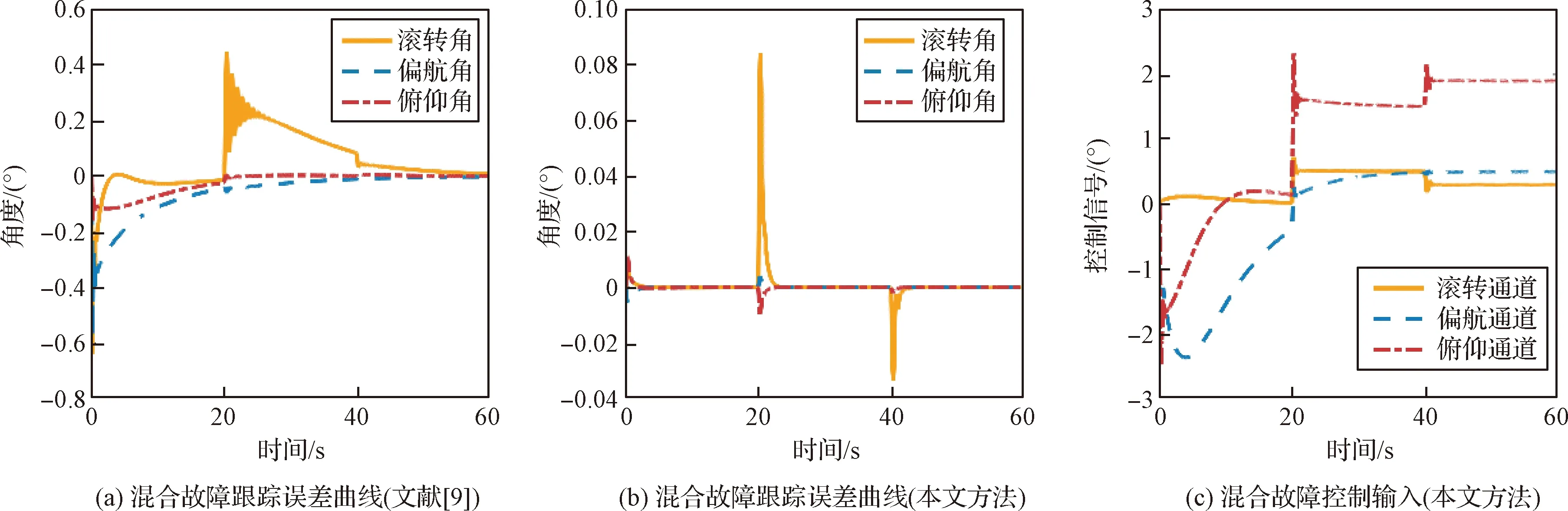
圖3 多發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障仿真結(jié)果Fig.3 Multi-engines actuator failures
針對(duì)所述故障,根據(jù)圖1所示的發(fā)動(dòng)機(jī)布局形式,經(jīng)過理論分析可知,發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)在20 s和40 s發(fā)生所述故障時(shí),對(duì)運(yùn)載火箭3個(gè)通道均會(huì)產(chǎn)生不同程度的影響,其中滾轉(zhuǎn)和俯仰通道的影響相對(duì)較大。仿真結(jié)果中,如圖3(c)的控制輸入曲線在滾轉(zhuǎn)、俯仰和偏航均具有不同程度的響應(yīng),驗(yàn)證了所提出控制器的有效性。
針對(duì)多個(gè)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障,相比于文獻(xiàn)[9]所提出的自適應(yīng)神經(jīng)網(wǎng)絡(luò)容錯(cuò)控制器,本文所提出的控制器能夠在5 s內(nèi)收斂至穩(wěn)態(tài),且跟蹤誤差最大在0.1°以內(nèi),在收斂時(shí)間和跟蹤誤差等方面,均具有更加良好的表現(xiàn),同時(shí)所設(shè)計(jì)的自適應(yīng)滑模容錯(cuò)控制器并未出現(xiàn)較為明顯的抖振現(xiàn)象,證明了所提出的控制器在多發(fā)動(dòng)機(jī)故障情況下更加優(yōu)異的性能。
3.3 發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)時(shí)變故障
針對(duì)發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)發(fā)生故障時(shí),因?yàn)橥獠繑_動(dòng)、機(jī)構(gòu)老化等造成的可能存在的時(shí)變故障,考慮如下的時(shí)變故障形式:當(dāng)t=20 s時(shí)助推發(fā)動(dòng)機(jī)3發(fā)生時(shí)變偏置型故障,偏置量為3+0.5sin(0.5t)°。仿真結(jié)果如圖4所示。
圖4(a)為文獻(xiàn)[9]所設(shè)計(jì)的自適應(yīng)神經(jīng)網(wǎng)絡(luò)容錯(cuò)控制器在發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)發(fā)生時(shí)變故障時(shí)的跟蹤誤差曲線。圖4(b)和圖4(c)為本文所提出的自適應(yīng)滑模容錯(cuò)控制器在同樣時(shí)變故障下的跟蹤誤差曲線及相應(yīng)的控制輸入曲線。
根據(jù)本文所采用的運(yùn)載火箭發(fā)動(dòng)機(jī)的布局形式,在發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)發(fā)生所述時(shí)變故障時(shí),會(huì)對(duì)滾轉(zhuǎn)和偏航通道產(chǎn)生較大的時(shí)變影響,為實(shí)現(xiàn)指令跟蹤,達(dá)到較好的控制效果,系統(tǒng)俯仰和偏航通道的控制輸入應(yīng)產(chǎn)生相應(yīng)的時(shí)變輸入,以抵消時(shí)變故障對(duì)控制系統(tǒng)的影響。在仿真結(jié)果中,圖4(b)顯示的滾轉(zhuǎn)方向更為明顯的姿態(tài)誤差變化,以及圖4(c)顯示的滾轉(zhuǎn)和偏航通道相應(yīng)的時(shí)變輸入,進(jìn)一步證明了所提出控制器的正確性。
在仿真結(jié)果中,本文所提出的自適應(yīng)滑模容錯(cuò)控制器和文獻(xiàn)[9]所提出的控制器均能實(shí)現(xiàn)指令跟蹤,但文獻(xiàn)[9]的指令跟蹤誤差只能維持在0.1°的范圍內(nèi),且收斂時(shí)間較長(zhǎng)。本文所提出的控制器能夠在5 s內(nèi)收斂到較小的穩(wěn)態(tài)誤差范圍內(nèi),且跟蹤誤差維持在0.01°的范圍內(nèi),在收斂時(shí)間和控制精度等方面均具有更加良好的表現(xiàn)。
3.4 故障大小對(duì)控制性能的影響分析
為進(jìn)一步說明本文所設(shè)計(jì)控制器的性能,探究故障量級(jí)對(duì)本文所設(shè)計(jì)控制器控制性能的影響,針對(duì)單個(gè)發(fā)動(dòng)機(jī)發(fā)生執(zhí)行機(jī)構(gòu)故障的情形,設(shè)計(jì)如下的仿真實(shí)驗(yàn)。
a) 考慮助推發(fā)動(dòng)機(jī)4發(fā)生偏置型故障,偏置量從0°到8°逐步增加,間隔0.1°,控制器參數(shù)等其他條件保持不變,觀察姿態(tài)控制系統(tǒng)的收斂時(shí)間及穩(wěn)態(tài)誤差等隨發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)偏置型故障時(shí)偏置量的變化;
b) 考慮助推發(fā)動(dòng)機(jī)2發(fā)生效率損失型故障,損失量從0%到100%逐漸增加,間隔1%,控制器參數(shù)等其他條件保持不變,觀察姿態(tài)控制系統(tǒng)的收斂時(shí)間及穩(wěn)態(tài)誤差等隨發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)效率損失量的變化。仿真結(jié)果如圖5~8所示。
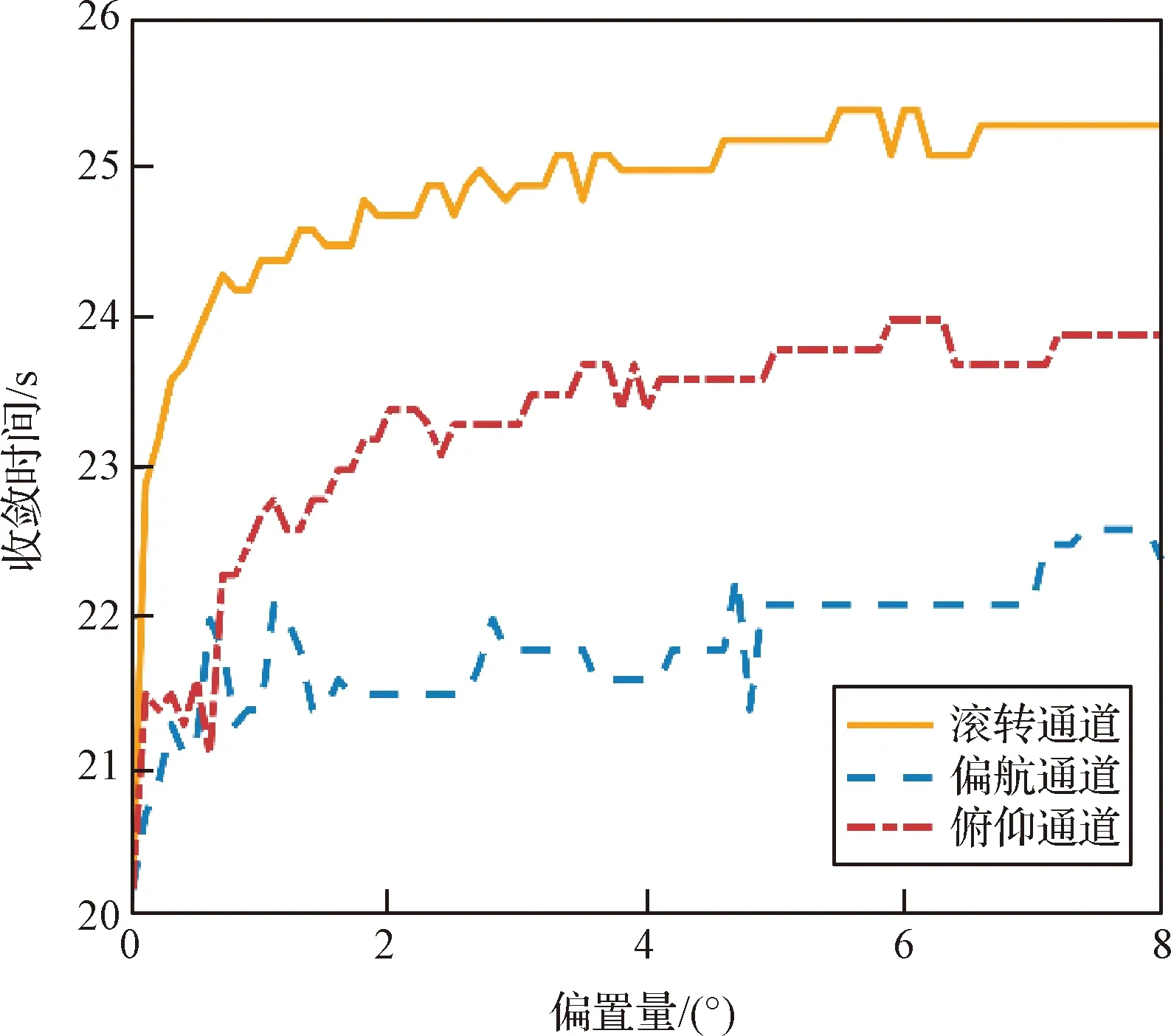
圖5 偏置型故障下收斂時(shí)間變化曲線Fig.5 Convergence time under actuator failures
基于仿真結(jié)果的分析,從圖5和圖7可以看出,在20 s故障發(fā)生后的收斂時(shí)間與執(zhí)行機(jī)構(gòu)故障量級(jí)呈正相關(guān)關(guān)系,即故障量級(jí)越大,則收斂時(shí)間越長(zhǎng)。值得注意的是,其中,滾轉(zhuǎn)通道受到的影響最大,所需要的收斂時(shí)間最長(zhǎng),根據(jù)發(fā)動(dòng)機(jī)布局分析可知,符合2號(hào)助推發(fā)動(dòng)機(jī)和4號(hào)助推發(fā)動(dòng)機(jī)發(fā)生故障時(shí)的實(shí)際情況。從圖6和圖8可以看出,隨著故障量級(jí)的增加,雖收斂時(shí)間逐漸增加,但在收斂至穩(wěn)態(tài)后,穩(wěn)態(tài)誤差并未出現(xiàn)較大的波動(dòng),始終保持在較小的范圍內(nèi),說明所提出的控制器具有較好的跟蹤控制精度,在發(fā)動(dòng)機(jī)執(zhí)行機(jī)構(gòu)故障時(shí)表現(xiàn)出良好的性能。

圖6 偏置型故障下穩(wěn)態(tài)誤差變化曲線Fig.6 Steady-state error under actuator failures
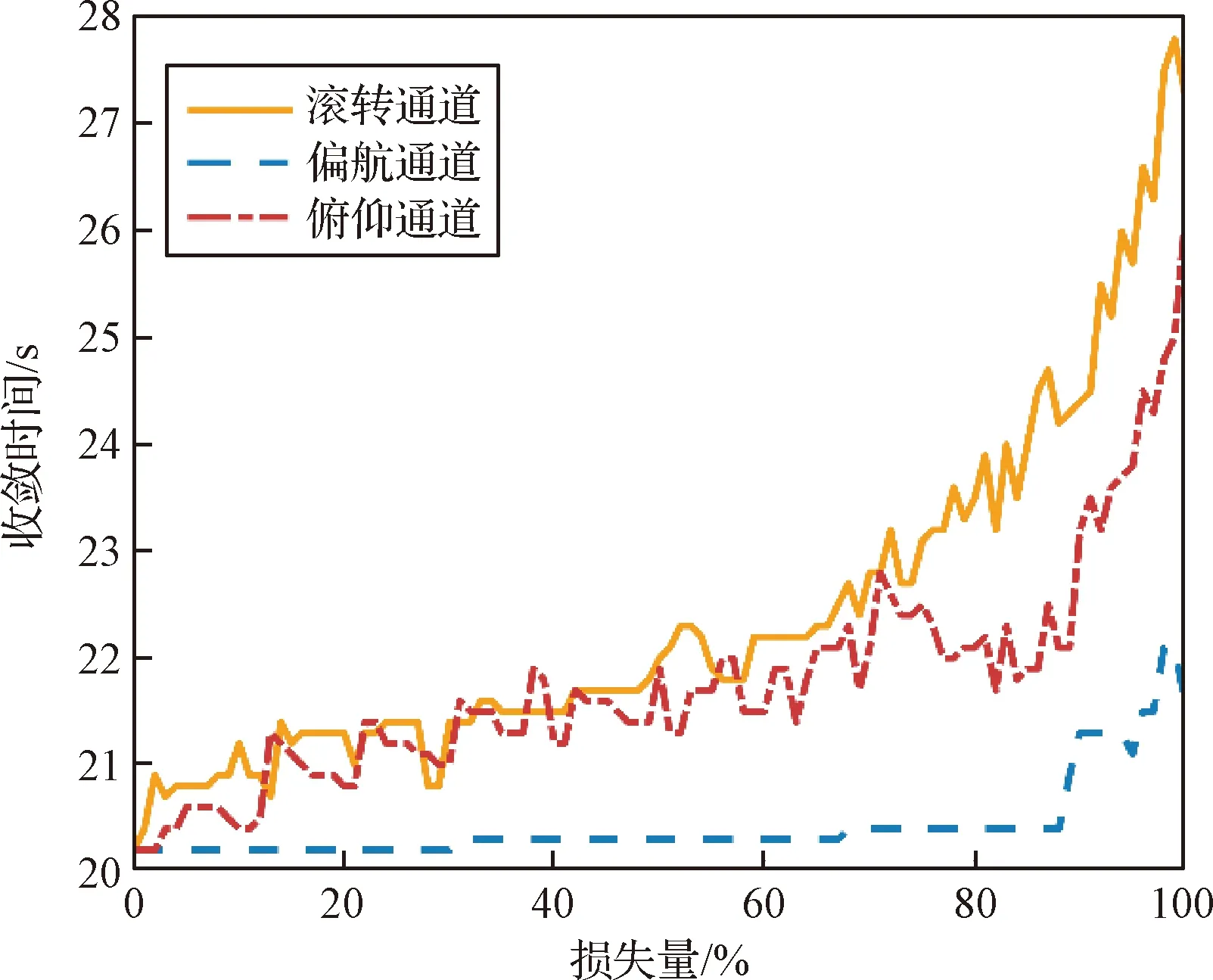
圖7 效率損失故障下收斂時(shí)間變化曲線Fig.7 Convergence time under actuator failures
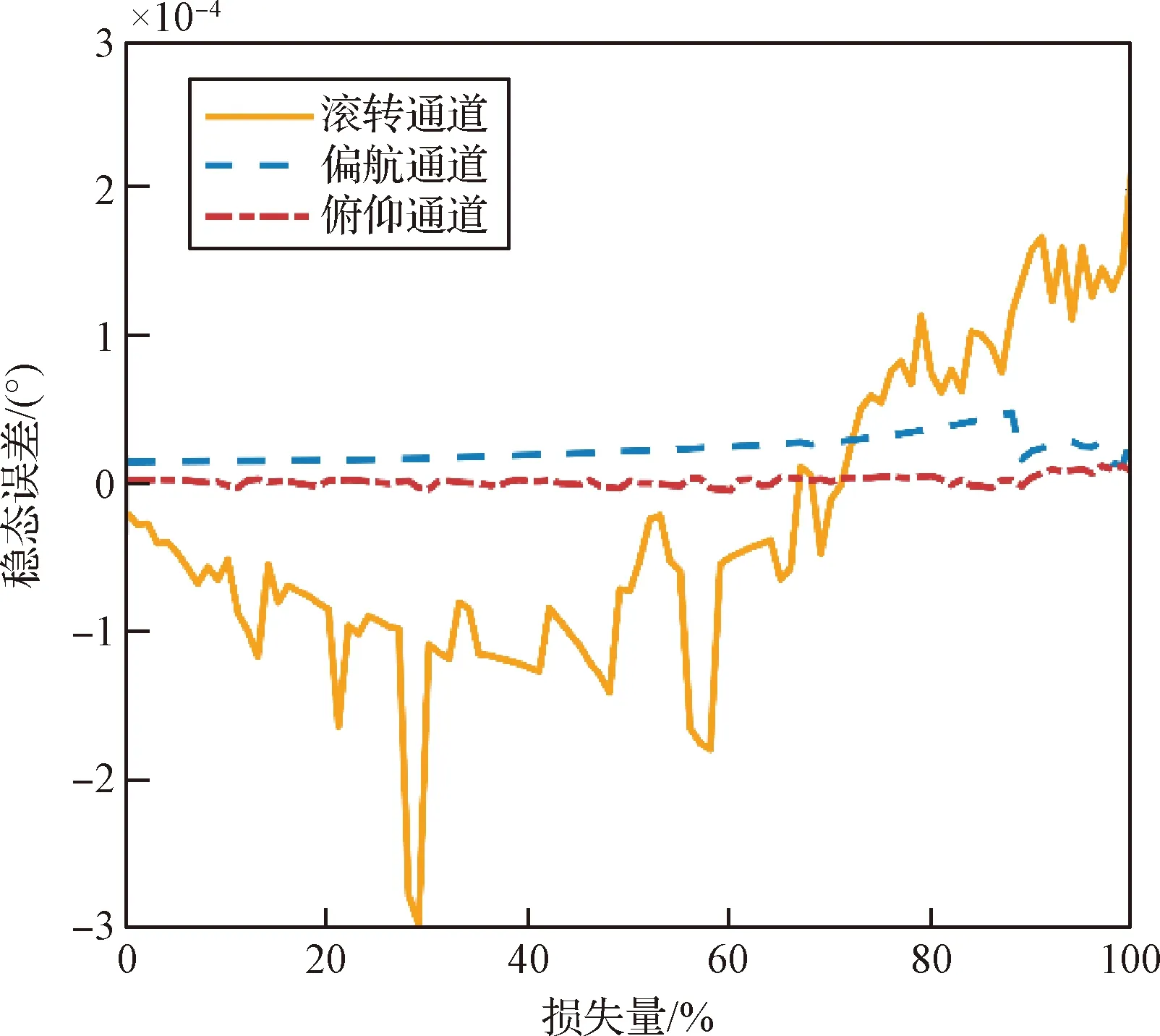
圖8 效率損失故障下穩(wěn)態(tài)誤差變化曲線Fig.8 Steady-state error under actuator failures
4 結(jié) 論
針對(duì)執(zhí)行機(jī)構(gòu)故障下存在內(nèi)部未建模動(dòng)態(tài)、外部不確定干擾等情況時(shí)的大型運(yùn)載火箭姿態(tài)控制系統(tǒng),本文提出了一種基于級(jí)聯(lián)降階擴(kuò)張狀態(tài)觀測(cè)器的自適應(yīng)滑模容錯(cuò)控制方法。所設(shè)計(jì)的級(jí)聯(lián)降階擴(kuò)張狀態(tài)觀測(cè)器能夠?qū)ο到y(tǒng)內(nèi)部未建模動(dòng)態(tài)、外部不確定干擾等進(jìn)行估計(jì),自適應(yīng)滑模控制律能夠獲得觀測(cè)器干擾估計(jì)誤差的上界信息并對(duì)其進(jìn)行補(bǔ)償。此外,該控制器所得到的控制輸入能夠消除滑模控制中的抖振現(xiàn)象,具有較高的實(shí)用價(jià)值。仿真結(jié)果驗(yàn)證了所設(shè)計(jì)控制器對(duì)執(zhí)行機(jī)構(gòu)故障的有效性及較好的指令跟蹤性能。后續(xù)將進(jìn)一步考慮存在噪聲及執(zhí)行機(jī)構(gòu)速率限制下執(zhí)行機(jī)構(gòu)故障的姿態(tài)控制系統(tǒng)高精度跟蹤控制和控制分配問題。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01