面向火星表面巡視探測的熱慣量反演模型及試驗驗證
2023-09-22 12:56:12常守金胡海濤
宇航學報 2023年8期
邢 琰,常守金,胡海濤,賈 永,何 俊
(1. 北京控制工程研究所,北京 100094;2. 上海交通大學制冷與低溫工程研究所,上海 200240)
0 引 言
地外探測中,準確的地形識別和通過性判斷是決定安全探測的關鍵,視覺測量能夠獲得表面幾何和紋理特征,但無法識別影響安全通行的內部物理特性,如顆粒大小和內聚力等[1-2]。利用火星表面熱物理特性輔助進行火星表面著陸和安全移動研究,是近年火星探測研究的熱點之一[3-4]。
熱慣量是引起物質表層溫度變化的內在因素,是物質熱物理特性的一種綜合量度,反映了物質與周圍環境能量交換的能力,也代表了物質對抗外界溫度變化的能力,熱慣量較高的物質晝夜溫差較小。熱慣量與顆粒大小和內聚力有關,以松散沙地為主的表面具有低熱慣量,而以巖石或硬殼為主的硬地面具有較高的熱慣量[5]。
熱慣量研究最早集中在衛星遙感領域,在地質和水文研究中起著非常重要的作用。Price[6]開創了地球遙感研究的一個新視角——熱慣量繪圖,開發了一種將熱慣性與表面溫度和反射率的遠程測量相關的算法,利用地球同步衛星數據對地球某部灌溉區和沙漠區之間的熱慣量進行對比。但在確定熱慣量精確值之前,必須估計當地天氣條件對熱慣量的影響。由于遙感溫度測量受表面濕度和熱慣量兩個因素影響,僅通過衛星熱紅外測量溫度獲得的“表觀熱慣性”具有潛在的誤導性,不適用于表面濕度變化的區域[7]。一種利用晝夜溫度變化相位角信息的實際熱慣性模型克服了表面濕度變化導致的熱慣量模型誤差,既適用于干旱地區,也適用于存在濕度變化和有植被覆蓋的地區[8]。Sobrino和Kharraz[9-10]開發了熱慣量估計四溫算法(Four temperature algorithm,FTA),從衛星遙感數據中獲得相位差,而無需地面測量有效表面發射率和大氣總水汽含量數據。根據FTA獲得的地球熱慣量值與當地已知特性相比,相對誤差約為15%。Matsushima等[11]基于熱慣量與土壤含水量高度相關理論,進一步研究使用熱紅外遙感技術進行熱慣量反演,用于估計土壤濕度,根據熱慣量估計值可粗略地將土壤濕度分為濕、中和干等。針對地球或地外天體遙感數據無法獲得詳細的表面溫度時變關系的問題,Wang等[12]提出了一種利用地表土壤熱通量和溫度的日振幅估算熱慣量的簡單方法。測試表明這種簡單的方法得到的熱慣量誤差約為15%,為地球和地外天體熱慣量估算提供了一條可行途徑。
隨著火星探測任務的展開,遙感領域研究人員開始著力于火星表面熱慣量研究。利用火星全球勘測者上的熱輻射光譜儀(Thermal emission spectrometer, TES)測量數據,Jakosky等[13]以3 km的空間分辨率繪制了火星選定區域的熱慣量圖,熱慣量范圍覆蓋了從沙塵地(低值)到巖石或硬殼地(高值),用來為未來著陸器、火星車和采樣返回航天器任務選擇安全且具有科學價值的著陸位置;Putzig等[14]構建了一個包括火星極區的接近全球范圍的完整季節性覆蓋熱慣量地圖,空間分辨率也為3 km。兩年后又處理了連續三個火星年的火星全球勘測者熱輻射光譜儀觀測結果,繪制了全球夜間和日間的視熱慣量季節圖,以分析表面性質不均勻區域的熱慣量隨時間和季節的變化[15]。研究結果對火星表面地質與氣候建模、著陸地點選擇以及其它利用熱慣量作為表征特性的工作具有重要意義。為給“勇氣號”和“機遇號”火星車選址,眾多研究人員使用海盜號火星探測器紅外熱像儀(IRTM)數據、火星全球勘測者熱輻射光譜儀(TES)等數據,開展與安全著陸和移動相關的火星表面熱慣量研究,從100 km的大尺度分辨率開始,逐漸提高到15 km/像素、3 km/像素,最后以100 m/像素的分辨率繪制了火星白晝和夜間的熱圖像,這些圖像以前所未有的規模揭示了火星表面的熱物理性質,顯示了露巖、坑洞、被大量灰塵覆蓋的區域的不同熱慣量[5]。
上述研究中均利用軌道遙感數據進行火星表面熱慣量估計,“勇氣號”和“機遇號”火星車著陸火星后,其配備的微型熱輻射光譜儀(Mini TES)提供了第一次從火星表面觀測熱特性的機會。Fergason等[16]利用兩輛火星車上的微型熱輻射光譜儀數據與軌道數據聯系起來,推導了每個著陸點土壤、基巖和巖石的熱慣性,以量化這些區域的物理性質并了解地質發展過程。Perko等[17]利用火星車測試數據以及實驗室模擬火星土壤,將火星土壤力學性質與熱慣性測量結果進行了比較,并給出了相關性。
“勇氣號”火星車在火星表面探測過程中因發生沉陷導致任務失敗,使基于熱慣量輔助地形識別、提高移動探測安全性的研究更加得到重視。Cunningham等[18]開發了一種預測地形松散程度的方法,通過一天中的溫度觀測數據來估計其熱慣量。這種方法的有效性高度依賴于觀測時間和時長,熱慣量估計預期誤差被表示為觀測時間和時長的函數。通過沙坑試驗,驗證該方法預測地形可穿越性的失敗率約為8%,但仍然提供了一種輔助視覺的地形安全性識別方法。Cunningham等[19]利用“好奇號”火星車的探測數據分析了熱慣量在提高火星車沙地滑移預測方面的潛力。通過測算沙地行駛時每個車輪的打滑量,并利用“好奇號”的溫度傳感器和軌道熱輻射成像系統估計熱慣量,建立了熱慣量與打滑的關系。“好奇號”火星車的溫度傳感器在標稱100 m2的橢圓范圍內僅給出一個溫度測量值,并且每小時只測量6分鐘的數據(頻率為1 Hz),測量區域也不在火星車的行駛路線上,熱慣量精度約為20%。盡管如此,“好奇號”火星車仍然為火星表面熱慣量研究提供了前所未有的數據。
已有研究已經明確地形的疏松程度和滑移率與其熱慣量具有較強的相關性,火星車可安全通過的緊實地形熱慣量顯著高于疏松地形[5]。但已有以火星遙感數據為主的熱慣量測算分辨率和精度,無法支持火星車在自主移動時及時識別松散沙地等易滑易陷地形,并通過路徑規劃避開危險。Chhaniyara等[20]指出地外天體表面探測任務的成功將取決于兩個關鍵因素——在軟沙和非結構化地形上的自主性和移動性,需要在當前技術上取得進一步發展,開發智能車載傳感系統,檢測和識別近地表和地下地形特性,以增強移動探測的機動性。利用熱慣量特性輔助視覺識別地形,成為提高火星車自主行駛安全性的可行途徑,但如何利用當地實測數據獲得可信的熱慣量數據,仍然沒有可靠的熱慣量估計模型。
本文研究建立了一種新的基于熱電偶測溫數據求解熱慣量的反演模型,并通過火星表面熱特性模擬與測試系統,建立了火星表面晝夜溫度環境,并通過不同類型模擬火壤材料,對所建模型的有效性進行了測試和驗證,以期為了利用火星車原位測量數據獲得更為精確的火壤地形下熱慣量,為未來實現更安全的火星表面自主探測提供技術儲備。
1 熱慣量理論模型建立
熱慣量綜合考慮了導熱系數、密度、及比熱容的影響,是土壤熱特性的一種綜合量度,其定義為:
(1)
式中:P是熱慣量,量綱為J/(m2·s1/2·K);k是導熱系數,量綱為W/(m·K);ρ是密度,量綱為kg/m3;c是比熱容,量綱為J/(kg·K)。
通過引入體積熱容和熱擴散系數,可將定義熱慣量的式(1)變換為式(2):
(2)
式中:C′是體積熱容,量綱為J/(m3·K);D是熱擴散系數,量綱為m2/s。
開發熱慣量P理論模型的關鍵是獲取土壤的體積熱容C′及熱擴散系數D。體積熱容C′可通過脈沖式平面熱源法[21]測得,熱擴散系數D可經熱電偶對土壤不同深度的溫度測量數據計算得到,從而可獲取被測地形的熱慣量信息。
1.1 熱慣量計算模型
隨晝夜變換,地球、火星等天體土壤表面附近的溫度是周期變化的,可以用一系列正弦項來描述,并且特定深度的溫度可以用標準的線性最小二乘回歸技術擬合到傅立葉級數中[22]。在擬合得到的傅立葉級數中,常數項表示一晝夜內的平均溫度,正弦級數項表示溫度變化周期內特定深度上的溫度在平均溫度附近的波動量。因此,一晝夜內深度x1處溫度T(x1)表示為[23]
(3)
(4)

深度x2>x1處溫度變化T(x2)可表示為諧波序列,但序列中的幅值及相移均會減少[24]:
(5)
(6)
(7)
式中:x2是土壤中大于x1的某一深度,量綱為m;φn2是x2處第n次正弦諧波的相移,量綱為rad;D是熱擴散系數,量綱為m2/s。
在深度x1處,通過將一晝夜的時間tR(對應于星體自轉周期)分成四個相等的時段,即式(3)中ωt分別取0、π/2、π、3π/2,可推導得到:
(8)
2T1cosφ1
(9)
式中:Ta,Tb,Tc,Td分別為土壤在一晝夜內第0、tR/4、tR/2、3tR/4時刻的時均溫度,量綱為K。對式(5)~(6)作近似的依據是三次及高次諧波的幅值遠小于一次諧波[25]。同樣地,可以推導得到x2處(Ta-Tc)與(Tb-Td)的近似解。
令土壤特定深度x處溫度差值(Ta-Tc)與(Tb-Td)的比值為無量綱參數R(x):
(10)
根據式(9)~(10),x1處和x2處R(x)可近似為
R(x1)≈-tanφ1
(11)
(12)
在R(x1)與R(x2)的近似解相等時,可推導出D的顯式解[21]:
(13)
根據上述公式,只需要選擇開始測溫的時間以及兩個測溫的深度,利用熱電偶在一晝夜內每隔四分之一tR測量土壤兩個深度處的溫度,即可計算得到土壤的熱擴散系數。結合式(2),得到了熱慣量的計算公式:
(14)
式中:R(x1)與R(x2)可分別用深度x1與x2處的溫度測量數據獲取。
1.2 熱電偶測溫
基于上述的熱慣量計算模型,利用熱電偶測量一個晝夜內兩個不同深度x1,x2的溫度T(x1),T(x2),可對測點位置的熱慣量進行計算。熱電偶的布置方式如圖1所示。熱慣量的計算流程如圖2所示。
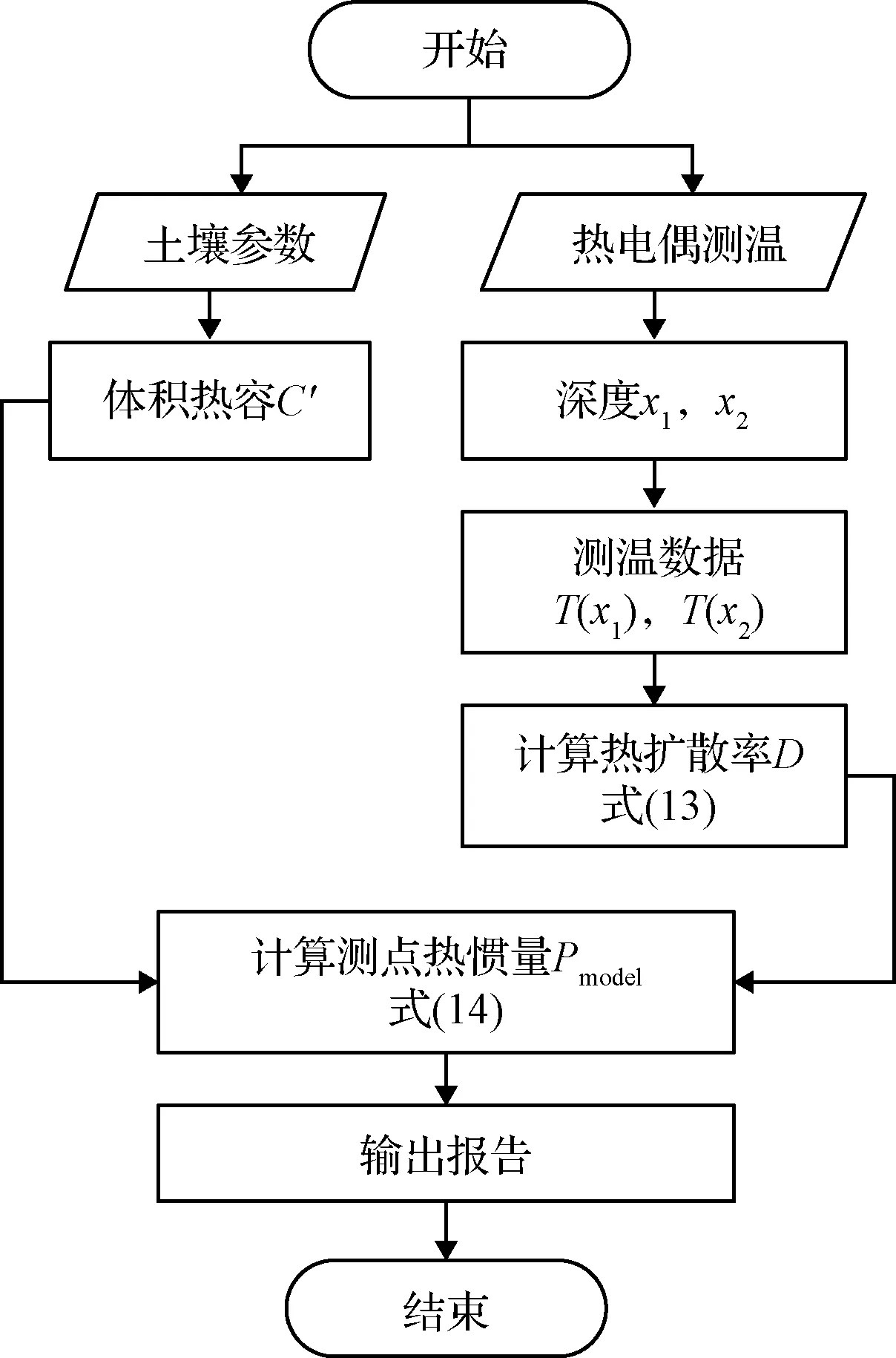
圖2 熱慣量計算流程Fig.2 Thermal inertia calculation process
2 模型的試驗驗證
為了驗證熱慣量理論模型,在室內建設了火星表面熱特性模擬與測試驗證系統,對不同模擬火壤材料及地形的熱慣量反演值和實際值進行了試驗測量,從而驗證模型精度。
驗證系統通過輻照式加熱裝置和預埋式制冷裝置,在模擬火星土壤地形上實現類似于火星表面溫度變化規律的溫度環境,主要包括火壤底部恒定的低溫條件以及表面溫度曲線特定的正弦變化規律,如圖3所示。

圖3 驗證系統Fig.3 Verification system
模型驗證試驗采用五種不同顆粒度和厚度的沙子作為模擬火壤材料,如圖4所示。將圖示的五種材料分別布置在測點1到測點5的位置上。
圖4 模型驗證試驗采用的5種材料Fig.4 Five materials used in model validation experiments
采用T型熱電偶對五個測點處模擬火壤兩個不同深度的溫度變化數據進行測量,熱電偶的布置方式如圖5所示。經校正的熱電偶精度為0.1 ℃。

圖5 五種地形在測試平臺上的布置方式Fig.5 Arrangement of the five terrains on the test platform
本文基于測試平臺對模擬火壤的溫度測量數據,通過上文建立的熱慣量反演模型,計算得到了測點1~5處的熱慣量值Pmodel。將Pmodel與通過測量式(1)基礎物性(k,ρ,c)[21]計算得到的熱慣量實際值Pactual進行對比,驗證模型的反演精度。熱慣量模型反演精度δ表示為反演絕對誤差與被測量實際值之比,即Pmodel與Pactual之間的相對誤差,如式(15)所示:
(15)
如表1所示,通過試驗得到了五個測點處的熱慣量模型反演值Pmodel、實際值Pactual、及模型的反演誤差δ。由表可知,熱慣量模型反演誤差的最大值小于6%,可以很好地反映被測區域熱慣量的實際值。因此,本文建立的熱慣量反演模型可基于熱電偶的測溫數據,較為準確地獲得目標區域的熱慣量。
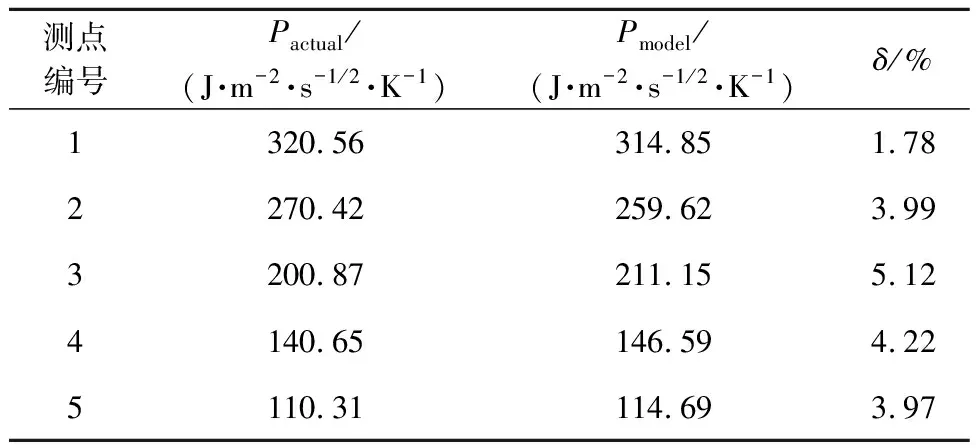
表1 不同測點區域的試驗數據Table 1 Test data of different measuring areas
3 結 論
本文研究提出了一種基于熱電偶測溫數據的熱慣量模型,該方法利用溫度實測值估計當地熱慣量,并基于不同模擬火壤的熱慣量試驗數據,對模型正確性進行了試驗驗證,得到如下結論:
1)熱慣量計算模型可基于熱電偶在一天中對土壤兩個深度的溫度測量數據準確預測被測區域的熱慣量信息;
2)模型驗證結果表明,理論模型對熱慣量的預測偏差小于6%,優于現有的基于軌道遙感數據的熱慣量模型,可以很好地反映被測區域的熱慣量實際值。
本文方法為土壤近表面熱慣量測量估計提供了一種技術途徑,火星車可以通過配置相應溫度測量傳感器,在線獲得行駛前方區域內的熱慣量值,通過聯合視覺、滑移等測量數據,準確識別地形可通行性,有效提高地外巡視探測的移動安全性。本文方法開啟了一條火星車實地測量反演熱慣量的研究思路,后續將進一步深化研究和驗證,獲得更加可靠的高分辨率高精度熱慣量模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03