工業機器人技術綜合實踐項目式教學探討*
2023-10-10 06:25:02強紅賓王聯丁力單文桃巢淵江蘇理工學院江蘇常州213000
科學與信息化 2023年19期
強紅賓 王聯 丁力 單文桃 巢淵江蘇理工學院 江蘇 常州 213000
引言
2015年我國為實現制造業強國戰略提出了“中國制造2025”計劃,2017年教育部提出“新工科”建設計劃,要求我國高校要能夠培養出有創造力、有良好工程意識的畢業生。
“工業機器人技術綜合實踐”課程是機器人工程專業綜合性、實踐性和工程性很強的專業核心課,是大學生鍛煉創造力、工程實際能力與綜合能力的主要環節。改實踐涉及機械設計、力學、電學、伺服電機、傳感器、自動控制等多方面的基礎知識。一般在學習“機器人技術基礎”、“機器人測試技術”等專業課程基礎之后開設。因此,該課程主要培養學生的實踐動手能力、綜合應用能力及技術創新能力。
1 工業機器人綜合實踐課程教學現狀
目前,該實訓課程一般是對工業機器人進行示教路徑規劃、PLC編程等,對現有的工業機器人進行應用,沒有根據需求對工業機器人進行設計、制造環節,不能培養工程應用能力,對工程意識的培養有不利影響,具有主題單調,缺乏創新。缺乏團隊合作、設計不完整,缺乏整體意識的缺點[1-2]。
2 工業機器人技術綜合實踐項目式教學方法
工業機器人技術綜合實踐主要目標是對多門專業核心課程進行綜合,使機器人工程專業學生能夠對機械、機器人、控制系統有整體感受。基于項目式教學的工業機器人技術綜合實踐[3-4],涉及的專業知識及項目實施流程如圖1所示。
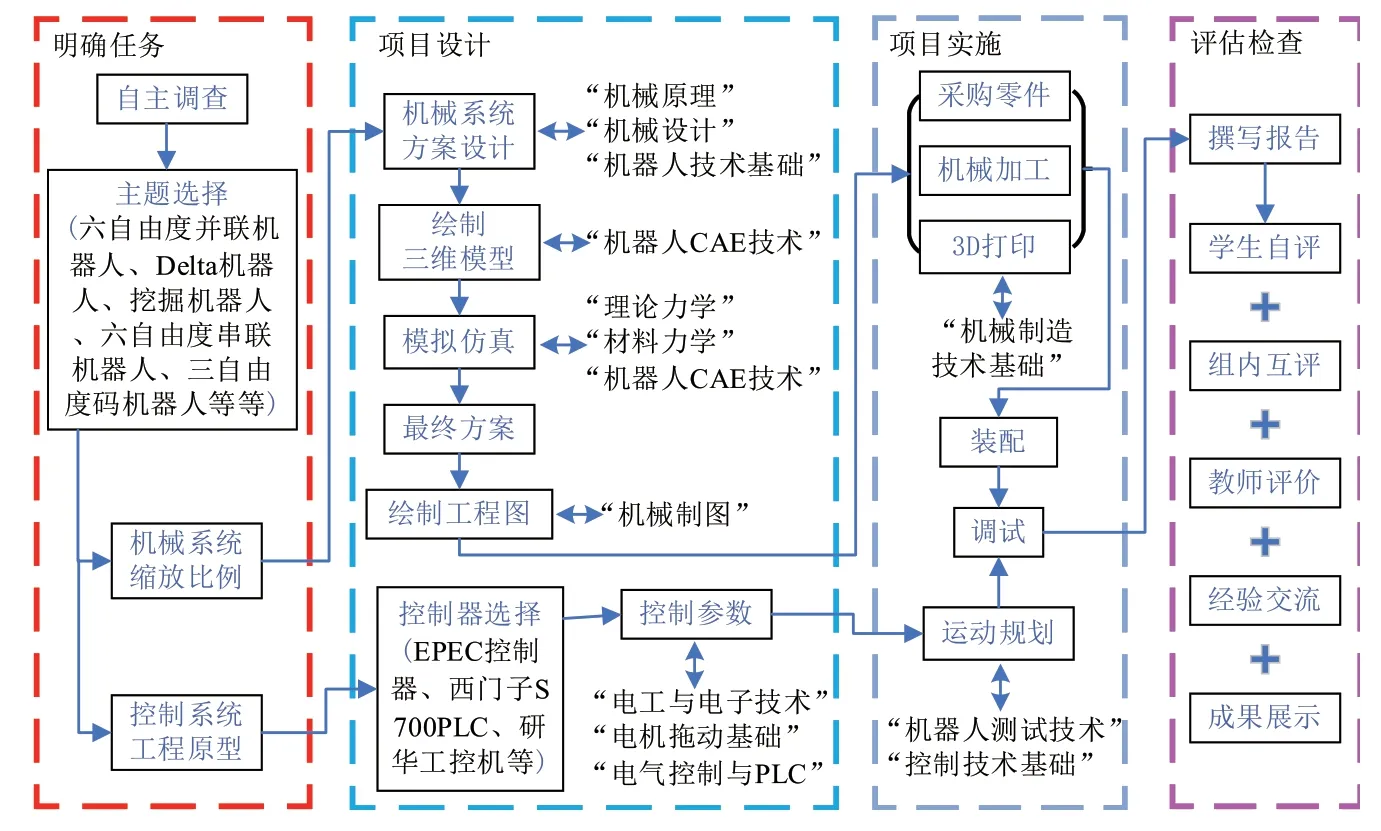
圖1 工業機器人技術綜合實踐實施過程
2.1 明確任務
允許學生對項目進行自主選題,既拓展項目范圍,又提高學生興趣,給其充分想象空間,使其學會獨立思考[5]。綜合實踐項目可以為六自由度機器人、Delta機器人、挖掘機器人、三自由度碼機器人等,其驅動方式可以為電液伺服驅動、電動或氣動。由于實際工業機器人的造價高、復雜性大,對學生機器人技術綜合實踐來說完成難度大、費用高、不利于實施,因此本次改革提出,學生在真實工業機器人的基礎上建立一個機械系統的比例模型進行設計、制作與裝配,但控制系統仍然采用真實的工業控制器,如EPEC控制器、西門子S700PLC等。因此,學生的項目任務為:①根據工程任務需求選定一款工業機器人;②設定其工作空間、負載能力、額定功率等性能指標,并對機械系統進行等比縮小;③小組任務分工,每項任務保證至少有2個學生參與,保證每項任務都經過小組討論后做出決定。
2.2 項目設計
對于比例縮小的機械系統,進行機械設計,首先應用專業核心課程內容,對工業機器人進行運動學分析,根據工業機器人工作空間來確定機構參數,根據負載能力,進行結構設計。其中,非標結構件主要包括機器人的機械臂、底座、夾具等,標準件主要包括軸承、緊固件、齒輪、導軌等。在設計過程中,對于簡單的結構可以采用《理論力學》、《材料力學》中的知識點進行受力分析,對于復雜的結構可以采用ANSYS等軟件進行受力分析。對于機器人的驅動能力可以采用ADAMS等軟件進行功率校核。通過分析、校核,機械結構合格后,對非標結構件繪制工程圖紙。對工業機器人進行運動控制,根據工業機器人工作順序、定位精度等來確定工業機器人控制方法、控制參數等。
2.3 項目實施
根據三維模型、二維圖紙對機械結構進行加工、制作、裝配。對于標準件直接進行采購,對于簡單的零件可根據二維圖紙直接進行加工,對于復雜的零件可以用3D打印機制造。目前,實驗室3D打印機可滿足學生自行打印。最終對機械加工件、3D打印件、標準件進行裝配、完成工業機器人的本體制作。此外,對工業機器人電路系統進行連接,并根據工作順序對工業機器人進行路徑規劃,根據不同控制器編寫PLC、C語言等運動控制程序,最終完成工業機器人整體安裝調試。
2.4 評估檢查
基于項目式教學的機器人綜合實踐,以項目考核與以賽代考的形式進行考核。調動學生的積極性,鍛煉學生綜合分析解決問題的能力,為在機器人競賽獲得優異成績打下基礎,提高學生的機器人應用能力與就業競爭力,以適應社會與產業對機器人創新人才的需求。在評估的過程中,學生首先進行自評和組內互評,依次保證組內學生之間的公平性,然后進行教師評閱。對于本組學生撰寫報告,包括項目實施過程中的具體過程,如機器人項目的選擇、方案設計過程、項目實施過程中遇到的問題及解決辦法、最終項目展示以及整體過程中項目實施經驗總結與分享。
3 綜合實踐舉例
根據項目實施流程,對一組基于挖掘機器人項目的工業機器人技術綜合實踐進行說明,如圖2所示,具體過程如下:
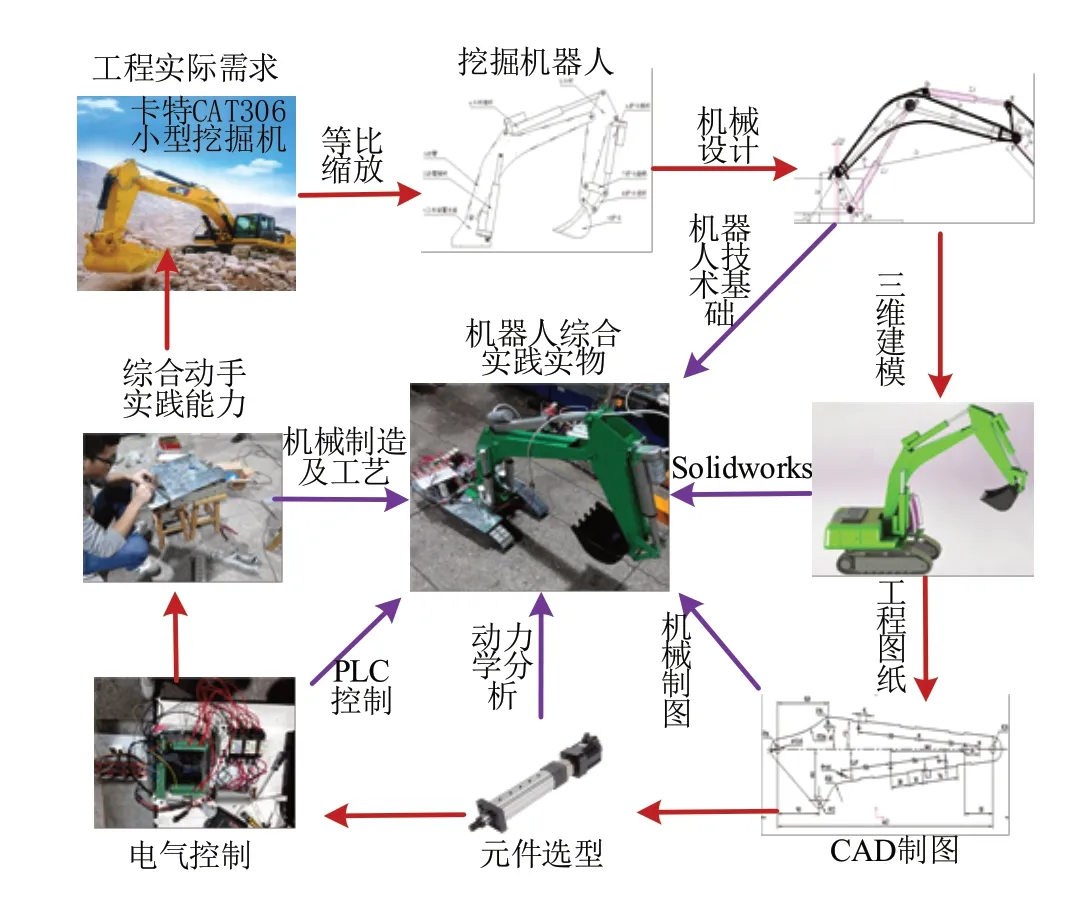
圖2 挖掘機器人課程實踐
3.1 明確任務
本組學生認為,隨著“一帶一路”政策的實施,其在不斷推動基礎設施建設,而挖掘機器人是基礎設施建設必不可少的工程機械,因此研究與開發挖掘機器人具有十分重要的現實意義。因以“挖掘機器人課程實踐”作為項目任務。課題選定后,學生對挖掘機器人進行具體的調查,了解其工作原理和各部件結構,教師帶領同學參觀卡特CAT306小型挖掘機器人的實際生產過程或相關視頻。通過調查和參觀,學生對挖掘機有一定的了解。在此基礎上,學生根據原型確定縮放比例,獲得項目參數,如表1所示。

表1 項目任務參數
3.2 項目設計
對挖掘機器人進行運動學分析,根據工業機器人表1所示的工作空間來確定工業機器人機構參數,動臂總長716mm,斗桿總長462mm,動臂電動推桿行程150mm,斗桿電動推桿行程200mm,鏟斗使電動推桿行程150mm。確定挖掘機器人機構參數后,根據鏟斗1.8L的負載能力,對挖掘工業機器人進行結構設計,包括非標結構件的設計和標準件的選型。采用Solidworks建立三維模型,并采用ADAMS等軟件進行功率校核,最終繪制工程圖紙。控制系統采用西門子S700PLC,對其進行單臂動作、雙臂聯合動作、三臂聯合動作編程,并能夠自動實現3種典型挖掘動作。
3.3 項目實施
根據二維圖紙對挖掘機機械臂結構進行加工,對于履帶、螺栓等標準件進行采購,完成工業機器人本體制作。對挖掘機器人電路系統進行連接,并根據工作順序對工業機器人進行編程,最終完成挖掘機器人整體安裝調試。
3.4 評估檢查
基于Solidworks制作動畫、撰寫設計計算及項目實施過程。首先進行學生自評和組內互評,然后教師根據報告進行評閱。通過此次的實踐課程可以將機器人專業理論課程的相關內容有機結合起來使學生對機器人結構設計和電子、電氣控制的軟硬件的設計過程有全面的了解,使學生掌握機電產品工程設計的基本方法,提高其分析問題和解決實際工程問題的能力,將專業課程內容有機而系統地結合起來。
4 結束語
基于項目式教學的工業機器人技術綜合實踐,充分考慮的實際工程項目,通過對工業實際機器人進行比例縮放,進行設計、制造、裝配及調試,讓學生全面了解工業機器人的生產過程,行程一個有機整體,且最大限度的綜合本專業核心課程、鍛煉學生了的實踐能力。該基于項目式教學的工業機器人技術綜合課程實施后,學生普遍反映工業機器人技術綜合實踐課程的效果比以前有所提高。
猜你喜歡
云南化工(2021年6期)2021-12-21 07:31:42
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
內蒙古教育(2021年20期)2021-03-08 01:09:14
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
教育與職業(2014年1期)2014-04-17 14:28:07