基于微型車的車輛隊列試驗平臺設計與開發*
2023-10-17 08:47:02邢春輝孔偉偉劉暢李鵬飛羅禹貢
汽車工程師 2023年10期
關鍵詞:控制策略
邢春輝 孔偉偉 劉暢 李鵬飛 羅禹貢
(1.中國農業大學,北京 100083;2.清華大學,汽車安全與節能國家重點實驗室,北京 100084)
1 前言
智能網聯汽車隊列是車輛智能化、網聯化技術學術研究和產業化應用的重要場景,也是未來智能汽車規模化應用的典型形態[1-2]。設計并開發智能車輛隊列試驗平臺,為車輛隊列或多車協同相關研究提供實車道路測試平臺和條件,具有重要的現實意義。
在車輛隊列控制方面:Li[3]等利用3 輛搭載全球定位系統(Global Positioning System,GPS)模塊的實車與基于專用短程通信(Dedicated Short Range Communication,DSRC)的 車 聯 網(Vehicle to everything,V2X)通信進行了隊列尾部入隊并穩定行駛的試驗;Li[4]等以3 輛微型履帶車作為線控執行系統,利用GPS 獲取位置信息,采用分布式模型預測控制(Model Predictive Control,MPC)實現隊列穩定行駛。以上2項研究在已實現高階自動駕駛功能的車輛基礎上搭建車輛隊列,成本較高且實現產業化尚有較大難度。Zhang[5]等以3輛實車作為線控執行系統,同時利用GPS 數據與車載傳感器數據支持隊列車輛的縱、橫向控制,完成了直線行駛、換道、環行和U 形彎4 個場景的試驗驗證。Lee[6]等在3 輛半掛重型汽車的基礎上,以攝像頭與雷達作為感知硬件,實現了車輛隊列的穩定行駛。以上2 項研究針對隊列行駛的不同場景完成了試驗驗證,但其隊列試驗場景各自獨立,缺少隊列組隊與不同場景轉換的功能。
綜上,為實現車輛隊列系統的產業化與規模化,本文未采用穩定性不足的GPS 軌跡跟蹤方法,而是以具備智能駕駛輔助功能的車輛為基礎,搭建具有可擴展性、支持多場景切換的車輛隊列試驗平臺。采用視覺感知的純跟蹤算法,并針對硬件方案進行調整,實現隊列車輛穩定的橫向控制。針對車隊內領航車與跟隨車分別設計車輛隊列試驗平臺硬件系統和分層軟件系統,基于閉環控制微型車開展車輛隊列在基礎功能場景下的試驗驗證,并分析試驗結果。
2 微型車隊列試驗平臺硬件系統設計
2.1 硬件系統架構
建立基于線控微型車的車輛隊列實車試驗平臺硬件系統架構,如圖1 所示。本文試驗平臺車輛只需具備基礎L2 級駕駛輔助功能,采用攝像頭支持隊列跟隨車的橫向控制,采用毫米波雷達支持隊列跟隨車的縱向控制。針對跟隨車,硬件系統由感知模塊、決策控制模塊和通信模塊組成:感知模塊負責獲取隊列系統所必需的環境信息,決策控制模塊負責智能決策與控制,通信模塊負責與他車、路側設備進行數據交互。領航車由遙控器直接控制,無需車載傳感器支持橫、縱向控制。
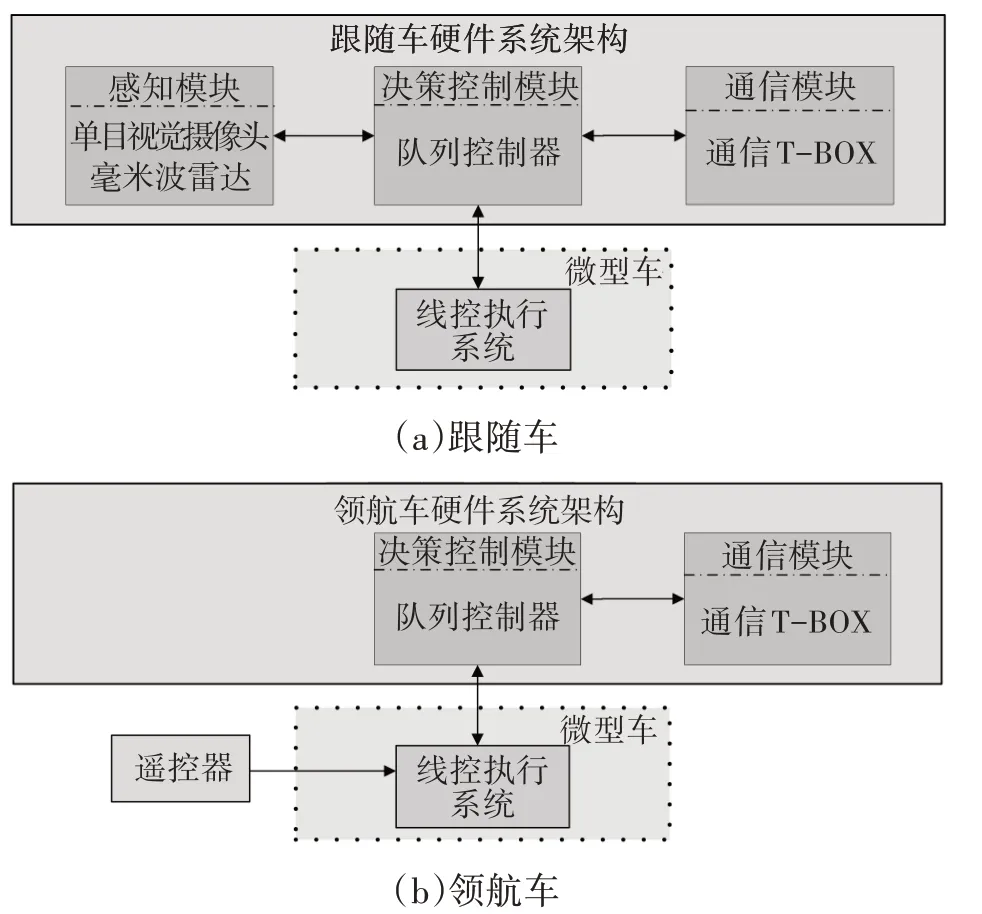
圖1 智能網聯車輛隊列硬件系統架構
本文試驗平臺采用某公司生產的電驅動微型車,其線控執行機構可實現車速、曲率閉環控制。領航車為四輪差速轉向微型車,跟隨車為差速轉向的履帶車,基本參數如表1所示。
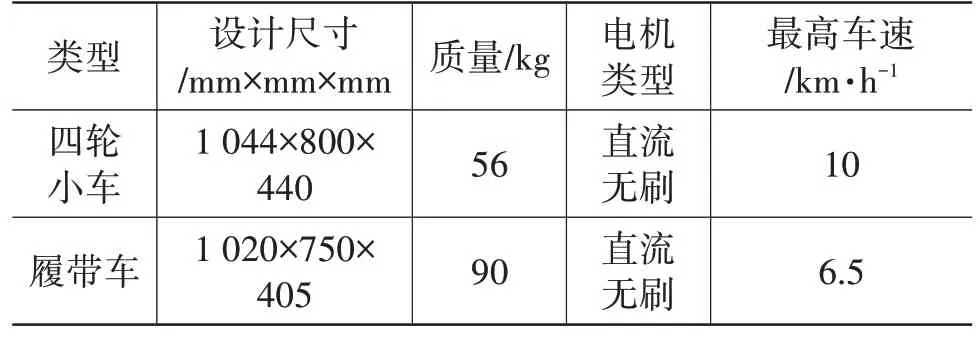
表1 微型車的主要參數
2.2 隊列控制器硬件設計
根據硬件功能可將隊列控制器分為微控制單元(Microcontroller Unit,MCU)子系統模塊、電源模塊、復位模塊、時鐘模塊、后臺調試模式(Background Debugging Mode,BDM)模塊。隊列控制器硬件架構如圖2所示。
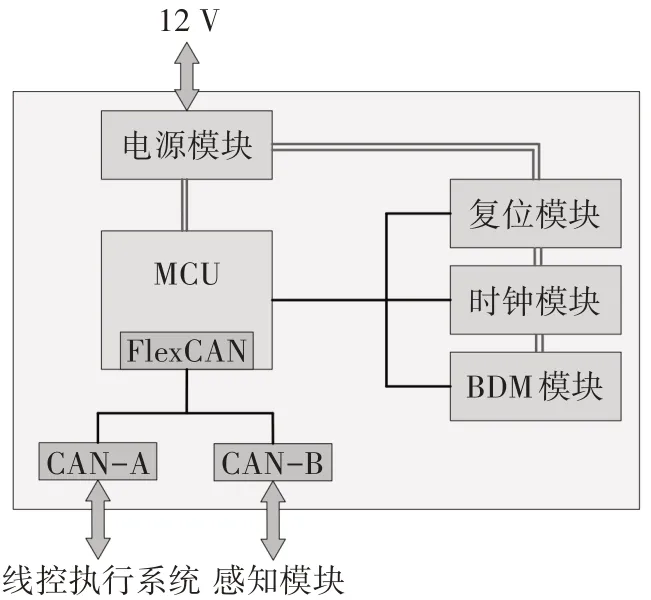
圖2 隊列控制器硬件架構
MCU 子系統模塊負責隊列相關決策、控制的計算;電源模塊接受微型車提供的12 V 電壓,經電源芯片為其他模塊供電;復位模塊保證控制器電壓不發生突變,使控制器正常工作;時鐘模塊產生的時鐘脈沖信號按一定的功率節拍對代碼進行讀取、譯碼、執行等;BDM 模塊用于此控制器的調試、內部閃存燒寫等功能。MCU 通過FlexCAN 與硬件系統中的其他硬件進行交互。控制器局域網(Controller Area Network,CAN)線路分為CAN-A 與CAN-B 2類線路,其中CAN-A 的通信速率為250 kbit/s,CAN-B的通信速率為500 kbit/s,高通信速率可滿足更龐大數據量的內容收發。CAN-A 與微型車線控執行系統進行速度、曲率等車輛狀態信息的交互;CAN-B與感知、通信模塊進行數據的交互。
2.3 感知模塊設計
隊列車輛需獲取車間距、相對速度等信息用于支持車輛的縱向控制,本文試驗平臺選用電子掃描雷達(Electronic Scanning Radar,ESR)檢測自車與前車的距離,其基本參數如表2所示。
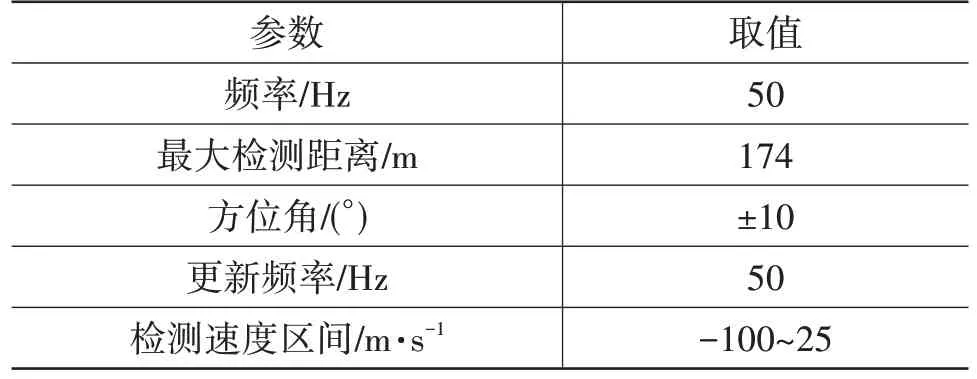
表2 電子掃描雷達基本參數
隊列車輛需要獲取車道線信息支持車輛的橫向控制,本文試驗平臺選用Mobileye 630 單目攝像頭識別車道線,輸出微型車橫向控制所需的道路航向角、曲率等數據,其基本參數如表3所示。
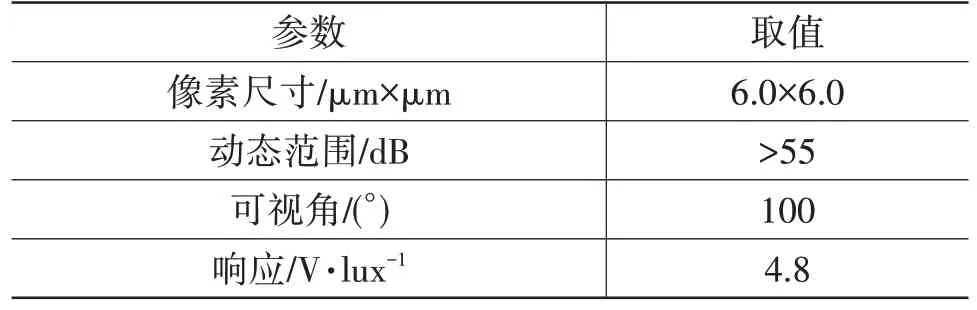
表3 單目攝像頭基本參數
2.4 通信模塊設計
目前,受業界廣泛關注的車聯網通信協議包括DSRC 和LTE-V[7](Long Term Evolution-Vehicle)。張心睿等[8]以數據包投遞率和時延為評價指標,通過試驗證明LTE-V 相較于DSRC 有更廣的通信范圍,且在同一范圍內可靠性更高。因此,本文試驗平臺選擇LTE-V 作為通信協議。V2X 通信需要遠程信息處理器(Telematics BOX,T-BOX)作為硬件載體,本文選用由星云互聯公司生產的OBUYZM9,其內置Linux 系統,可通過安全外殼(Secure Socket Shell,SSH)協議訪問、調整通信的內容,以滿足不同的通信需求。隊列微型車與路側設備分別搭載通信T-BOX,從而實現V2X通信。
3 微型車隊列試驗平臺軟件系統設計
3.1 分層軟件系統架構
本文試驗平臺采用具備可擴展性、可切換功能場景的分層軟件系統架構,如圖3 所示。本文將軟件系統分為數據交互層、感知層、決策層、控制層4個部分。決策層為軟件系統的運算中樞,接收來自數據交互層、感知層的數據,根據數據進行隊列系統相關控制策略的執行,并根據策略選擇不同的控制方法。控制層將期望速度與期望曲率輸出到微型車線控執行系統,并接收車輛狀態反饋量,實現隊列車輛的閉環反饋控制。在控制過程中,決策層將隊列狀態信息發送到數據交互層實現與他車、路側設備的交互。
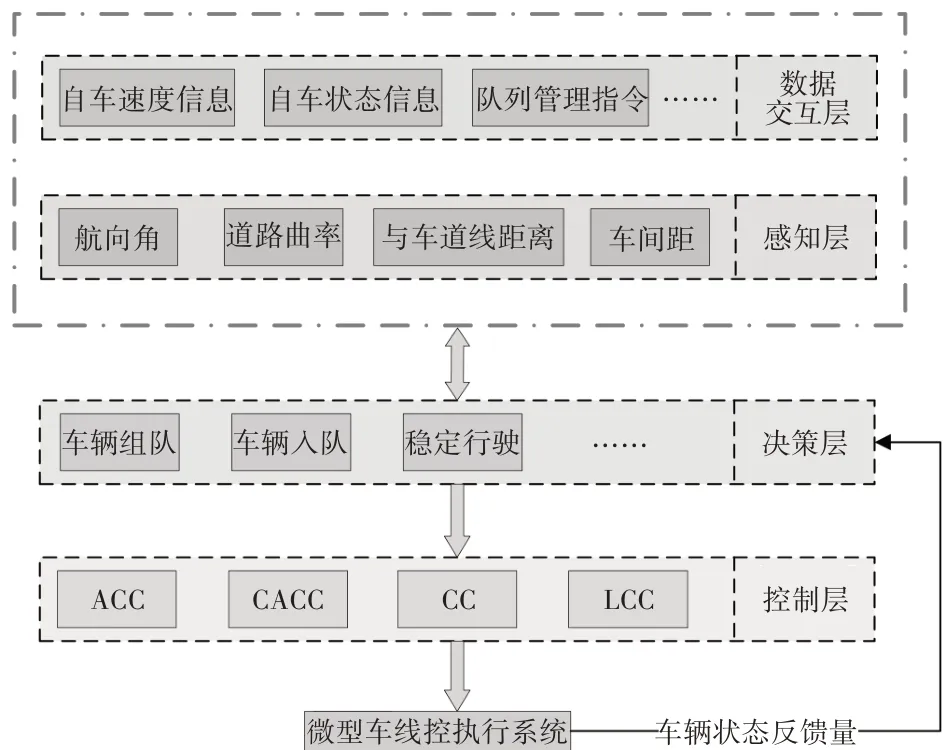
圖3 隊列系統軟件系統架構
數據交互層中包括微型車速度信息、微型車狀態信息、隊列管理指令等;感知層包括感知硬件采集的航向角、道路曲率、自車與車道線距離、自車與前車間距等信息;決策層包括車輛組隊、車輛入隊、穩定行駛等隊列功能場景;控制層包括隊列微型車所應用的縱、橫向控制方法,如自適應巡航控制(Adaptive Cruise Control,ACC)、協同自適應巡航控制(Cooperative Adaptive Cruise Control,CACC)、定速巡航控制(Cruise Control,CC)、車道居中控制(Lane Center Control,LCC)。
跟隨車決策層根據接收到的數據與指令進行相應的決策與控制。建立決策層架構,如圖4所示,首先將接收到的數據進行整合、處理,再根據數據信息判斷當前車輛的角色與功能場景,車輛角色分別為自由車、領航車、跟隨車。自由車即非隊列車輛,如將要加入隊列的車輛或已離開隊列的車輛;領航車即人工控制的隊列頭車;跟隨車即隊列中具備基礎輔助駕駛功能的跟隨車。隊列功能場景包括車輛組隊、車輛入隊、隊列穩定行駛等。根據車輛角色與功能場景即可判斷當前需要執行的控制策略,完成控制策略計算后便可輸出控制層所需的控制方法序號以及隊列管理等信息。

圖4 決策層架構
采用此設計方法使本軟件系統具備2項優勢:
a.可拓展性。此軟件系統采用分層軟件系統架構,若需增添隊列功能場景,只需在決策層增加相應的控制策略,不必改變軟件系統架構。
b.功能場景可切換。隊列運行過程中,只需改變當前車輛的角色與所要執行的控制策略,便可實現功能場景的切換。
3.2 數據交互層與感知層設計
隊列車輛需要與路側設施、其他車輛進行數據交互,建立數據交互層信息流,如圖5所示。數據交互層通過2.4節中的通信T-BOX 硬件實現。自車與他車間交互傳輸的數據包括車輛速度、與前車的間距、協同組隊指令、協同入隊指令。例如,當車輛入隊時,入隊車輛需向領航車發出入隊請求,待領航車同意入隊后再執行車輛入隊控制策略。路側設備將組隊指令、入隊指令、入隊車輛編號發送到自車,自車根據指令選擇相應的控制策略。
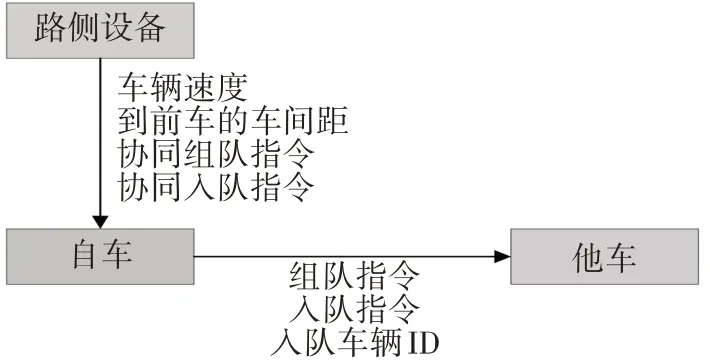
圖5 數據交互信息流
感知層獲取隊列系統所必需的環境信息并輸出到決策層、控制層。感知層獲取的數據如表4 所示。為使隊列車輛實現車道居中控制,需獲取自車所處車道的數據信息,即從單目攝像頭獲取的A0~A3、AQuality。為使隊列跟隨車實現自適應巡航控制,需要獲取自車與前車的距離、相對速度數據,即通過毫米波雷達獲取的參數B1和B2。同時決策層也需車間距等數據進行決策。
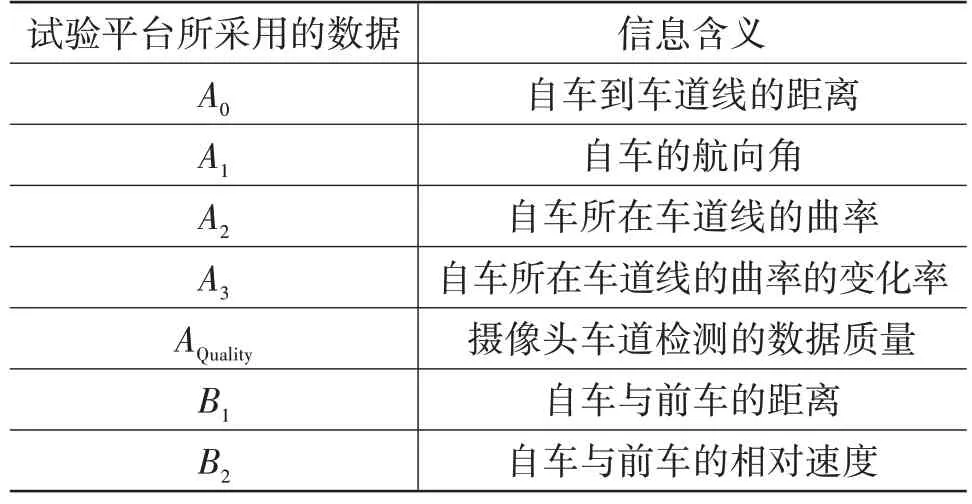
表4 感知層所獲取的數據
3.3 決策層控制策略設計
本文針對典型場景說明相應的決策層控制策略,分別為車輛組隊、車輛入隊、隊列穩定行駛。
3.3.1 車輛組隊
本文設計的車輛組隊控制策略如圖6所示。車輛組隊的初始狀態為2 輛車自由行駛,車輛角色為自由車,路側設備發出組隊指令后,后車收到組隊指令,并在領航車同意后加速駛入通信范圍;后車進入通信范圍后,會繼續調整速度直至到達隊列穩定行駛車間距,至此兩車角色分別轉為領航車與跟隨車并完成車輛組隊。
3.3.2 車輛入隊
車輛入隊場景設置為同一車道的入隊車輛加入穩定行駛的車輛隊列,完成入隊過程。本文設計的車輛入隊控制策略如圖7所示。當車輛隊列穩定行駛時,路側設備發送入隊指令到隊列車輛,領航車同意入隊后,入隊車輛加速駛入通信范圍;入隊車輛進入通信范圍后,繼續調整速度直至車間距到達隊列穩定行駛期望距離,車輛角色轉為跟隨車,至此完成車輛入隊。
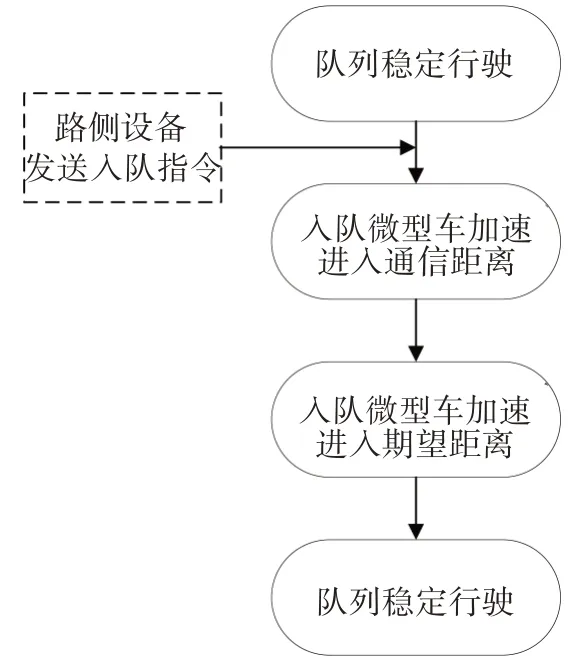
圖7 車輛入隊控制策略
3.3.3 隊列穩定行駛
隊列穩定行駛場景設置為隊列車輛以相同的速度穩定行駛。本文設計的隊列穩定行駛控制策略如圖8所示,隊列處于穩定行駛狀態時,隊列頭車角色為領航車,隊列內其余車輛角色為跟隨車。各隊列車輛以相同速度勻速行駛,并實時更新隊列狀態,接收、響應路側設備的指令等。
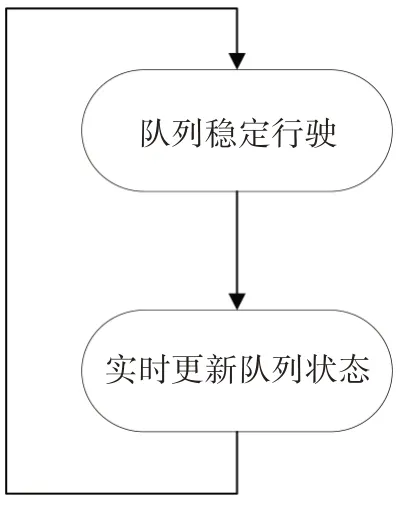
圖8 隊列穩定行駛控制策略
3.4 控制層設計
國內外關于車輛橫、縱向控制的研究已較為成熟[9],本文主要對已有的控制方法進行應用。控制層分為縱向控制與橫向控制。縱向控制包括CACC、ACC、CC,橫向控制為LCC。縱向控制中:CACC以速度信息與車間距信息作為控制輸入;ACC 以車間距信息作為控制輸入;CC 以固定速度作為控制輸入。CACC 的穩定性較傳統的ACC 更優[10],故本文應用CACC作為隊列穩定行駛控制方法。
本文應用的CACC 采用車輛隊列的前車-領航車-跟隨車(Precessor-Leader-Follower,PLF)式通信拓撲結構,隊列跟隨車可獲取前車與領航車的狀態信息,如圖9所示。
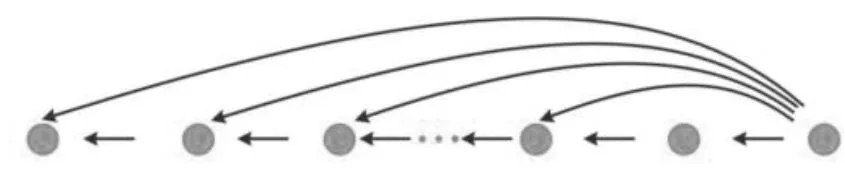
圖9 車輛隊列PLF通信拓撲結構
CACC 控制器通過車車通信技術獲取前車與領航車的車輛狀態信息,并將其作為控制輸入,以提高車輛隊列行駛穩定性。其控制模型如圖10所示,首先將實際車間距與期望車間距的差值ei作為PID控制模塊的輸入并輸出期望加速度ades,然后通過積分運算得到期望速度vdes。期望車間距ldes求解過程為:
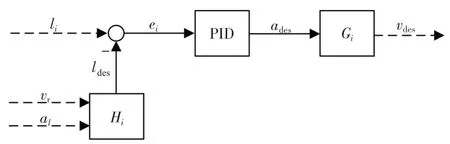
圖10 CACC控制模型
式中,h1為加速度系數;al為領航車加速度;h2為速度系數;vi為自車速度;l0為最小安全車距。
本文試驗平臺采用的隊列控制器分布于車端,算力有限,所以采用對算力要求低但控制效果良好的PID控制算法[11]。
在車輛入隊過程中或在隧道等特殊場景下,通信質量無法保證,因此,本文采用ACC、CC 彌補CACC過度依賴通信的缺陷。
在車輛橫向控制中,為避免隊列車輛因過度依賴GPS 信號造成在GPS 信號較差時發生安全事故,本文通過道路跟蹤方法(Road Following Method)實現隊列車輛沿車道穩定行駛。隊列車輛橫向控制采用純跟蹤(Pure Pursuit)算法[12],如圖11 示,以自車為原點A建立坐標系,其中,車輛行駛方向為Y軸正方向,車輛前方的道路中心點B為預瞄點。
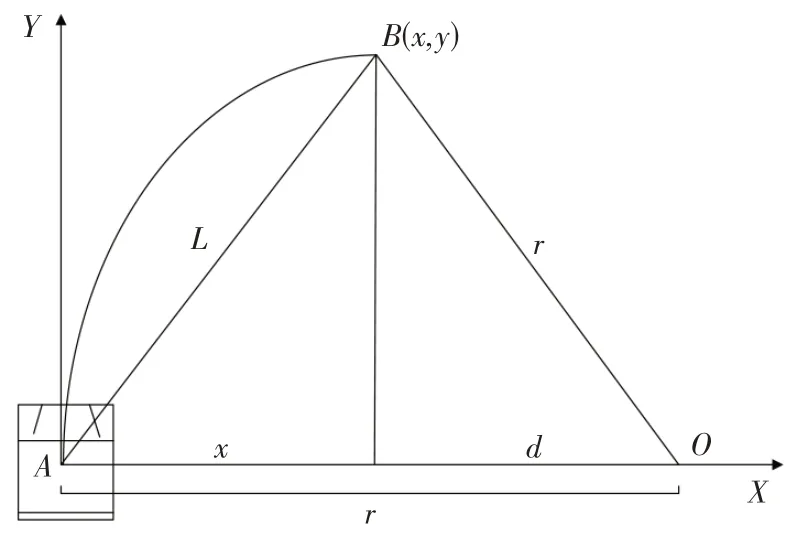
圖11 純跟蹤算法控制原理
通過推導可得:
式中,(x,y)為預瞄點坐標;L為預瞄距離;r為車道線半徑;δ為期望曲率。
為求解預瞄點橫坐標x,需通過擬合預瞄點縱坐標y得出:
式中,C3i為道路曲率微分;C2i為道路曲率;C1i為車輛航向角;C0i為車輛到車道線的距離。
因采用攝像頭感知方案求解y坐標較為困難,且預瞄距離L與預瞄點縱坐標y相差較小,故可直接用L代替y求得預瞄點橫坐標x:
將x代入式(4),可求得期望曲率δ,將δ輸入線控執行系統便可完成車輛閉環控制。
在車輛實際行駛時,單目視覺攝像頭會出現單側車道線數據質量過低導致數據不可用的情況,對此,本文設計了當單側數據質量過低時僅使用另一側車道線數據的策略,如圖12所示。
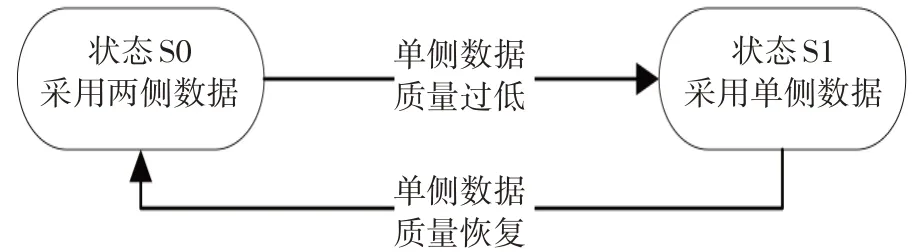
圖12 攝像頭數據質量低時操作過程
4 試驗驗證
4.1 試驗設計
采用3輛微型車作為隊列試驗平臺的線控執行系統,如圖13a 所示。其中車輛1 為領航車,車輛2、車輛3 為跟隨車。所加裝的硬件如圖13b~13e 所示。
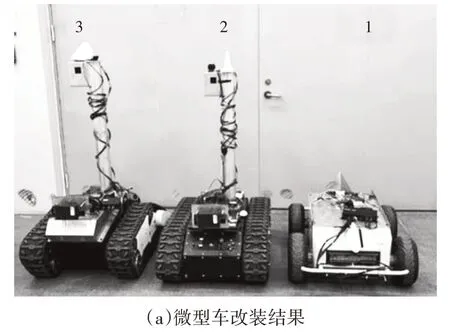
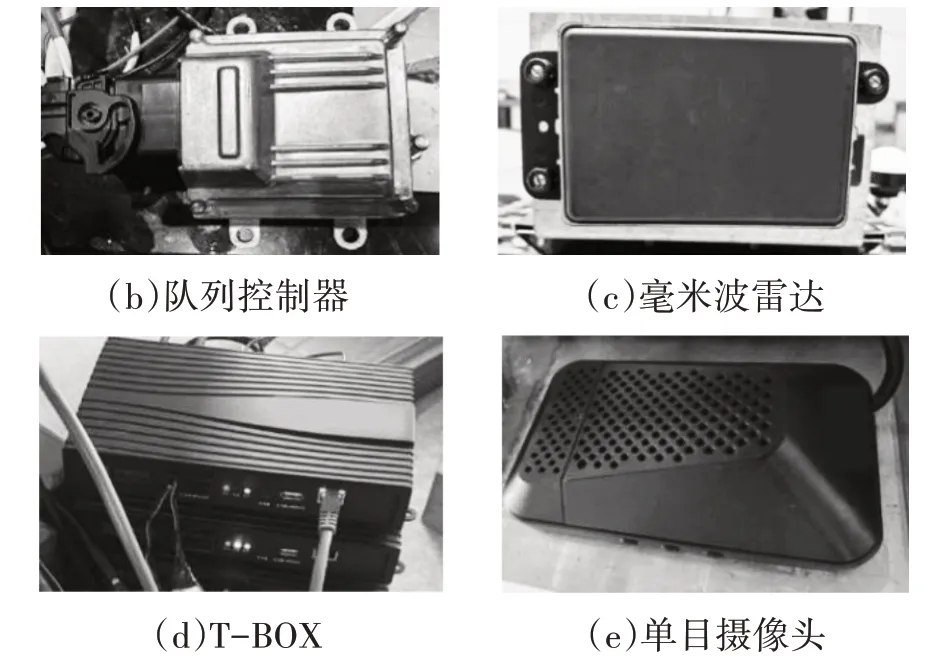
圖13 微型車改裝結果及部分硬件
試驗路線由直道與彎道組成,總長95 m,如圖14 所示。微型車依次進行車輛組隊、車輛入隊、隊列穩定行駛試驗。

圖14 試驗路線
4.2 試驗結果與分析
采用3輛車的速度數據與跟隨車的車間距數據對車輛隊列控制效果進行分析,設計了綜合隊列功能驗證場景與隊列試驗過程,速度、車間距數據如圖15、圖16所示:
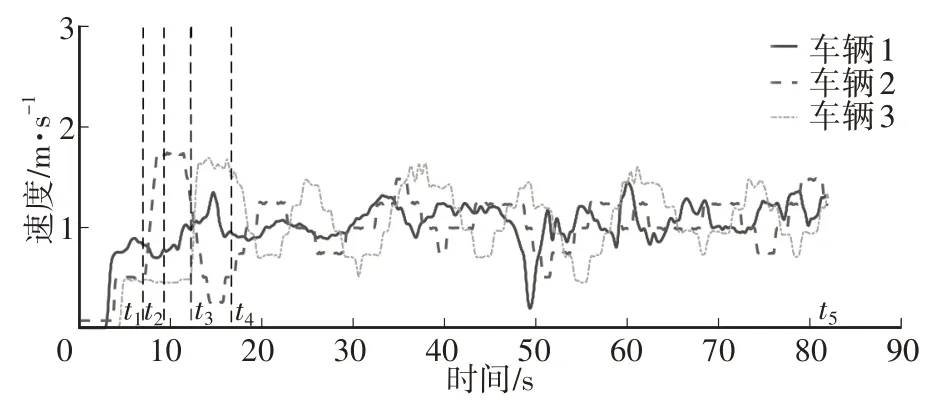
圖15 隊列車輛速度

圖16 跟隨車與前車的間距
0~t1時刻:3輛微型車勻速自由行駛。
t1時刻:路側設備發送組隊指令,車輛2 收到入隊指令并在車輛1同意組隊后開始加速。
t1~t2時刻:車輛2 加速行駛,直到兩車間距到達隊列穩定行駛期望間距,隨后車輛1 車與車輛2 開始隊列穩定行駛,完成車輛組隊。
t3時刻:路側設備發送入隊指令,車輛3 收到入隊指令并在車輛1同意入隊后開始加速。
t3~t4時刻:車輛3 加速行駛,直到與車輛2 的車間距滿足隊列穩定行駛期望間距,隨后3 輛車開始隊列穩定行駛,完成車輛入隊。
t~t時刻:3輛車組成的隊列進入穩定行駛狀態。
因領航車控制采用手動遙控方式,且試驗路線包括彎道,故無法保證領航車完全勻速行駛。跟隨車的距離誤差、速度誤差如圖17所示。通過各跟隨車之間的間距誤差、速度誤差數據對穩定行駛試驗結果進行分析,可知車間距誤差區間為-1~1 m,速度誤差區間為-1~1 m/s。誤差區間處于隊列系統誤差可接受范圍,能夠較好地實現隊列穩定行駛。由圖17 可知,在第48 s,當領航車經過彎道造成速度突變時,兩跟隨車速度隨之變化,并能夠在速度調整后繼續保持隊列穩定行駛。
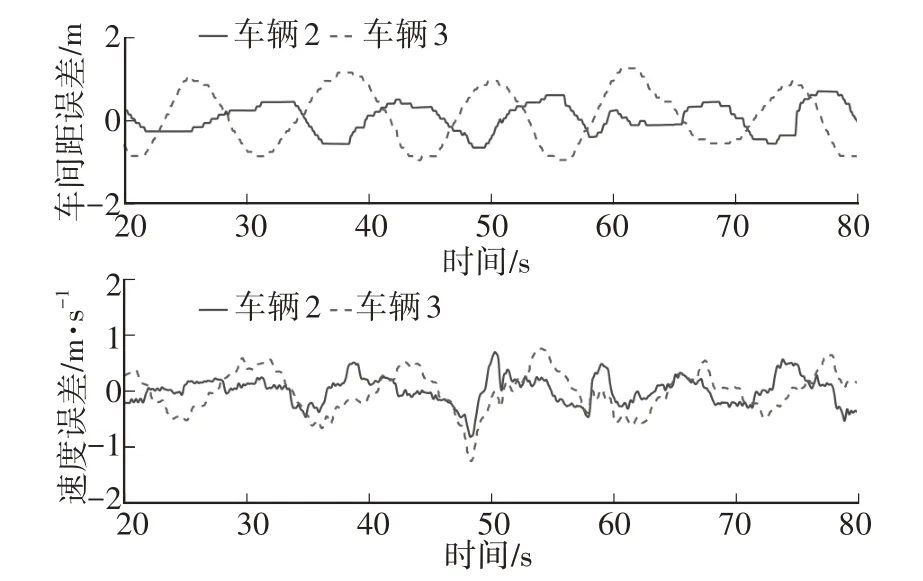
圖17 隊列穩定行駛試驗結果
5 結束語
本文設計并開發了基于基礎駕駛輔助功能車輛的隊列試驗平臺,實現了試驗平臺的擴展與多場景切換。在軟件系統中依據車輛角色與功能場景判斷當前車輛所要執行的控制策略,實現了隊列車輛不同功能場景的切換。同時,使軟件系統具備了模塊化特性,使該平臺具備了較強的可擴展性,易于增添更加復雜的功能場景。本文基于3輛微型車完成了智能網聯車輛隊列試驗平臺的搭建,并且在包括直道、彎道的實際道路場景中開展了車輛隊列從靜止到連續功能場景的試驗驗證,且速度控制誤差在±1 m/s 內。試驗結果表明,該試驗平臺具備基礎隊列功能,且能夠滿足復雜控制策略的試驗驗證需求。
致謝
本研究工作受國家自然科學基金青年科學基金項目(編號52002209)資助。本研究工作受汽車安全與節能國家重點實驗室開放基金課題(編號KFY2210)資助。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
