
自動駕駛汽車實驗教學(xué)平臺研發(fā)
2023-10-26 20:01:52雍加望馮琦李巖松馮能蓮張衛(wèi)強(qiáng)
中國教育技術(shù)裝備 2023年14期
雍加望 馮琦 李巖松 馮能蓮 張衛(wèi)強(qiáng)

DOI:10.3969/j.issn.1671-489X.2023.14.033
摘? 要? 自動駕駛已成為未來汽車技術(shù)發(fā)展的主要方向之一。為使學(xué)生理解并掌握自動駕駛核心技術(shù),研發(fā)了基于快速控制原型的自動駕駛汽車實驗教學(xué)平臺。平臺集成了感知傳感器、快速控制原型設(shè)備及線控底盤系統(tǒng),能夠基于MATLAB/Simulink搭建自動駕駛控制模型,并借助快速控制原型設(shè)備實現(xiàn)自動駕駛功能的開發(fā)與實驗,為高校教學(xué)與實踐奠定實驗基礎(chǔ)。
關(guān)鍵詞? 自動駕駛;實驗平臺;線控底盤
中圖分類號:G642.423? ? 文獻(xiàn)標(biāo)識碼:B
文章編號:1671-489X(2023)14-0033-05
Research and Development of Experimental Tea-
ching Platform for Autonomous Vehicle//YONG Jiawang, FENG Qi, LI Yansong, FENG Nenglian, ZHANG Weiqiang
0? 引言
自動駕駛汽車是集成環(huán)境感知、高精地圖、決策控制及人工智能等多種技術(shù)的綜合體[1-2],可以顯著提升汽車的行駛安全性。自從美國國防部第一次舉辦自動駕駛挑戰(zhàn)賽以來,自動駕駛技術(shù)愈來愈受到關(guān)注[2],國內(nèi)外提出了一系列研究平臺以促進(jìn)自動駕駛技術(shù)的測試與發(fā)展。Matthias等人[3]提出了一種基于虛擬場景的實車在環(huán)測試平臺,借助搭建的與實際道路一致的虛擬場景模型,模擬一些較為危險的行駛工況,在實現(xiàn)自動駕駛功能有效測試的同時避免實際道路測試帶來的風(fēng)險。Jin等人[4]提出了一種內(nèi)置高精度車輛模型的智能汽車測試臺架,能夠?qū)χ悄芷囻{駛過程中受到的各類型干擾進(jìn)行模擬,與線控底盤結(jié)合,能夠?qū)σ恍┓蔷€性程度較強(qiáng),傳感器受到不同程度干擾的行駛工況進(jìn)行仿真。為匹配行業(yè)前沿技術(shù)的發(fā)展需求,國內(nèi)高校紛紛開始建立自動駕駛汽車實驗平臺,用于開展實踐教學(xué)與創(chuàng)新設(shè)計。如花威等人[5]搭建了基于模型在環(huán)仿真的自動駕駛虛擬測試平臺,可以通過導(dǎo)入實車監(jiān)控數(shù)據(jù)驗證強(qiáng)化學(xué)習(xí)算法的有效性。趙祥模等人[6]提出了基于整車在環(huán)仿真的自動駕駛汽車室內(nèi)快速測試平臺,可實現(xiàn)場景及傳感器虛擬仿真、車輛模擬及智能駕駛策略驗證等功能。馬志成等人[7]利用虛擬現(xiàn)實和仿真技術(shù)建立了自動駕駛整車在環(huán)仿真平臺,基于真實車輛動力學(xué)特性驗證不同場景下的智能駕駛策略。王潤民等[8]圍繞自動駕駛整車在環(huán)虛擬仿真測試需求,提出了一種基于多自由度轉(zhuǎn)鼓平臺的自動駕駛整車在環(huán)虛擬仿真測試平臺,包含道路模擬子系統(tǒng)與傳感器模擬仿真子系統(tǒng),并完成了仿真平臺的開發(fā)及測試流程設(shè)計。以自動駕駛汽車自適應(yīng)跟馳及避撞場景測試為典型應(yīng)用案例進(jìn)行了仿真測試,證明了該平臺能夠滿足自動駕駛研發(fā)測試的需求。
以上平臺均是關(guān)注虛擬場景和智能駕駛控制策略的仿真研究平臺,缺少對于執(zhí)行層的研究,且不具備實車道路測試驗證功能。此外,除了考慮基于當(dāng)前技術(shù)所能實現(xiàn)的自動駕駛功能以外,還應(yīng)該考慮對于未來先進(jìn)技術(shù)的直接移植、新功能的開發(fā)擴(kuò)展以及不同功能之間的組合兼容等要求。因此,本文提出一種基于快速控制原型的自動駕駛汽車實驗教學(xué)平臺,其可為自動駕駛感知算法、傳感器數(shù)據(jù)融合算法、自動駕駛上層控制算法,底層執(zhí)行機(jī)構(gòu)、高級駕駛輔助系統(tǒng)的開發(fā)與測試等提供實時高效的實驗平臺,同時為新興技術(shù)的移植和新功能的開發(fā)提供條件。
1? 實驗平臺架構(gòu)
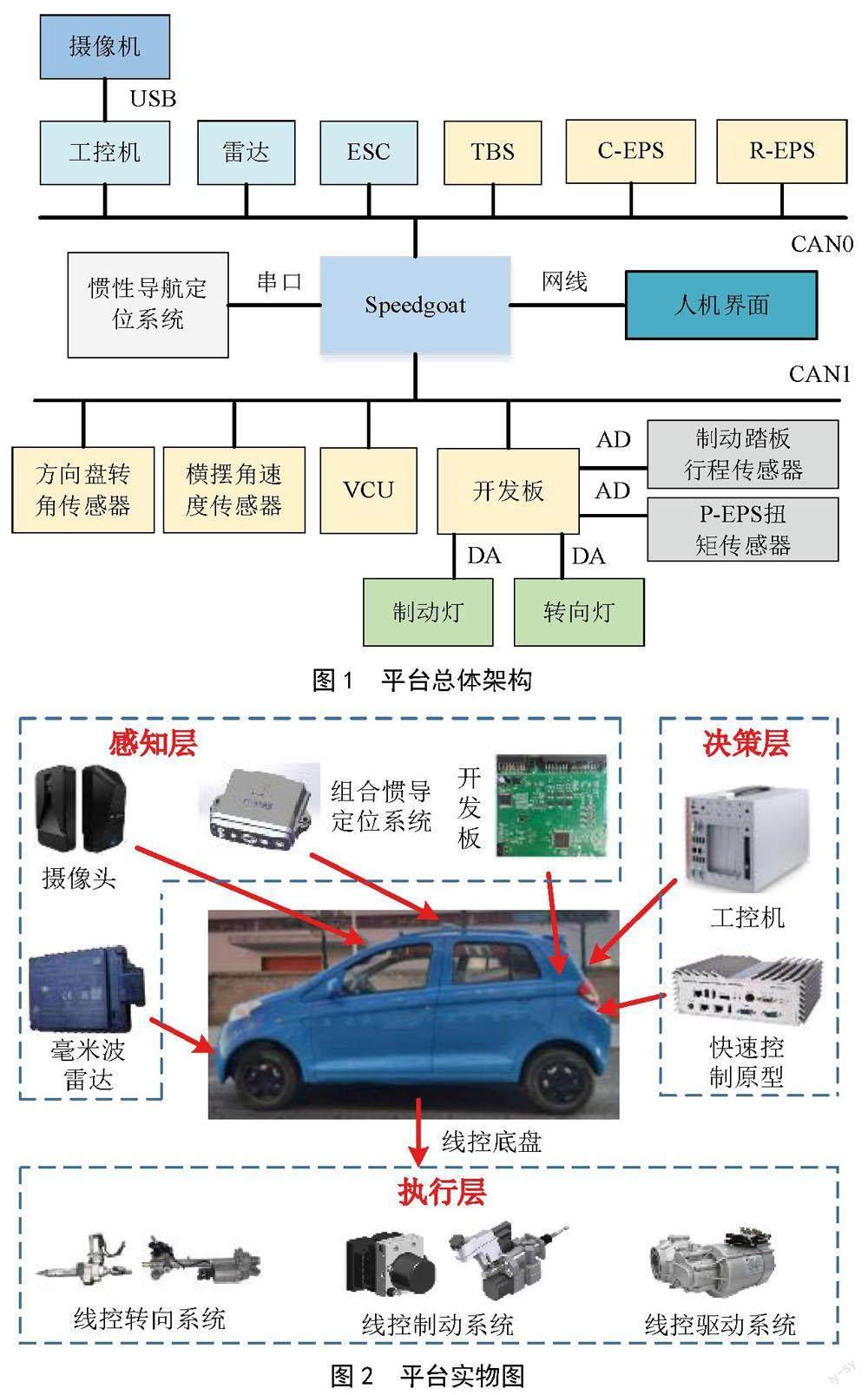
自動駕駛汽車實驗教學(xué)平臺總體架構(gòu)如圖1所示。主要由整車控制器(vehicle control unit,VCU)、線控底盤、快速控制原型設(shè)備Speedgoat、感知傳感器、狀態(tài)傳感器、工控機(jī)、顯示器及開發(fā)板等組成。其中,線控底盤包括由管柱式電動助力轉(zhuǎn)向(column electric power steering,C-EPS)系統(tǒng)和齒條式電動助力轉(zhuǎn)向(rack electric power
steering,R-EPS)系統(tǒng)組成的冗余線控轉(zhuǎn)向系統(tǒng)、由電動助力制動(electric booster brake,EBB)
系統(tǒng)和電子穩(wěn)定性控制(electronic stability control,ESC)系統(tǒng)組成的冗余線控制動系統(tǒng)、線控驅(qū)動系統(tǒng);開發(fā)板采集狀態(tài)傳感器信號,并通過CAN總線與Speedgoat交互數(shù)據(jù);感知傳感器包括攝像機(jī)、毫米波雷達(dá)和慣性導(dǎo)航定位系統(tǒng);顯示器固定在副駕駛前方,用于設(shè)置測試工況、顯示測試數(shù)據(jù)。
圖2為平臺實物圖。感知層:慣性導(dǎo)航定位系統(tǒng)輸出車輛位置及姿態(tài)信息,攝像頭獲取前方道路圖像,通過圖像處理算法得到障礙物及車道線信息,毫米波雷達(dá)探測前方障礙物距離信息;決策層:Speedgoat通過串口和CAN總線接收感知層信息,并進(jìn)行感知數(shù)據(jù)融合,根據(jù)融合后的感知數(shù)據(jù)進(jìn)行決策判斷,通過CAN總線向執(zhí)行層發(fā)送制動、轉(zhuǎn)向以及力矩控制指令;執(zhí)行層:線控底盤響應(yīng)決策層控制指令,實現(xiàn)底層閉環(huán)控制。
2? 實驗平臺工作原理
2.1? 感知層
前向攝像頭選擇支持汽車安全完整性等級(ASIL)
的安森美AR0231,支持雙重轉(zhuǎn)換增益設(shè)置,可提高所有照明條件下的精確圖像捕獲性能;前向毫米波雷達(dá)采用我國77 GHz長距離雙波束ARS 408-21,并通過軟件進(jìn)行雷達(dá)配置及過濾器設(shè)置,能夠在前向攝像頭由于黑暗或大霧等惡劣天氣無法正常工作時,采集環(huán)境信息;慣性導(dǎo)航定位系統(tǒng)選擇北斗星通Npos320,其采用深耦合組合導(dǎo)航算法,內(nèi)部集成了高精度全球?qū)Ш叫l(wèi)星系統(tǒng)板卡和車規(guī)級MEMS慣性測量單元,選配外部4G通信模塊,針對不同場景的智能駕駛應(yīng)用,可以提供高精度、高可靠性的三維位置、姿態(tài)、速度解算,并支持導(dǎo)航原始數(shù)據(jù)輸出,滿足多傳感器深度融合需要。
2.2? 決策層
控制器采用快速控制原型設(shè)備Speedgoat Baseline,選用2核Intel Celeron處理器,主頻1.4 GHz,內(nèi)存4 GB DDR3 RAM,64 GB固態(tài)硬盤,操作系統(tǒng)為Simulink Real-Time,具備4路CAN、2路COM、1路LAN及6路I/O。工控機(jī)采用宸曜科技Nuvo-8240 GC,選用i5 LGA1151 CPU,支持兩片NVIDIA? Tesla T4 GPU,4個SODIMM內(nèi)存插槽,2個×8(4-lanes)的Gen3 PCIe卡槽可插擴(kuò)展卡,8~48 V寬范圍直流輸入,內(nèi)置點火信號電源控制。
基于MATLAB/Simulink搭建感知信息融合算法及自動駕駛控制模型,利用代碼生成技術(shù)導(dǎo)入至Speedgoat。算法設(shè)計指標(biāo)包括:1)感知融合準(zhǔn)確性指標(biāo);2)軌跡跟蹤指標(biāo);3)駕乘人員舒適性指標(biāo);4)車輛經(jīng)濟(jì)性指標(biāo);5)車輛穩(wěn)定性指標(biāo)。
2.3? 執(zhí)行層
實驗平臺中,決策層輸出的控制指令通過CAN總線發(fā)送至執(zhí)行層,包括加速踏板開度指令、轉(zhuǎn)向角度指令和制動壓力指令。其中加速踏板開度指令通過整車VCU控制電機(jī)驅(qū)動力矩實現(xiàn),制動壓力通過制動踏板傳感器或者上層算法獲取。
轉(zhuǎn)向角度指令由線控轉(zhuǎn)向系統(tǒng)實現(xiàn)。平臺安裝雙電機(jī)冗余線控轉(zhuǎn)向系統(tǒng),如圖3所示。分別在管柱上安裝C-EPS、在轉(zhuǎn)向器齒條上安裝R-EPS。C-EPS和R-EPS互為冗余,當(dāng)其中一個發(fā)生故障時,故障信息發(fā)送至決策層,決策層將主動轉(zhuǎn)向指令發(fā)送至未發(fā)生故障的轉(zhuǎn)向電機(jī)。在駕駛員接管駕駛之后,C-EPS實現(xiàn)助力轉(zhuǎn)向功能,R-EPS不工作;在決策層判斷出駕駛員轉(zhuǎn)向操作會引起危險或駕駛員開啟主動轉(zhuǎn)向控制功能時,決策層計算期望轉(zhuǎn)向角,默認(rèn)由R-EPS實現(xiàn)轉(zhuǎn)向角度指令。在轉(zhuǎn)向管柱加裝轉(zhuǎn)角傳感器SX-4300,其測量范圍為±750°,測量精度為0.1°,用于轉(zhuǎn)角閉環(huán)控制。
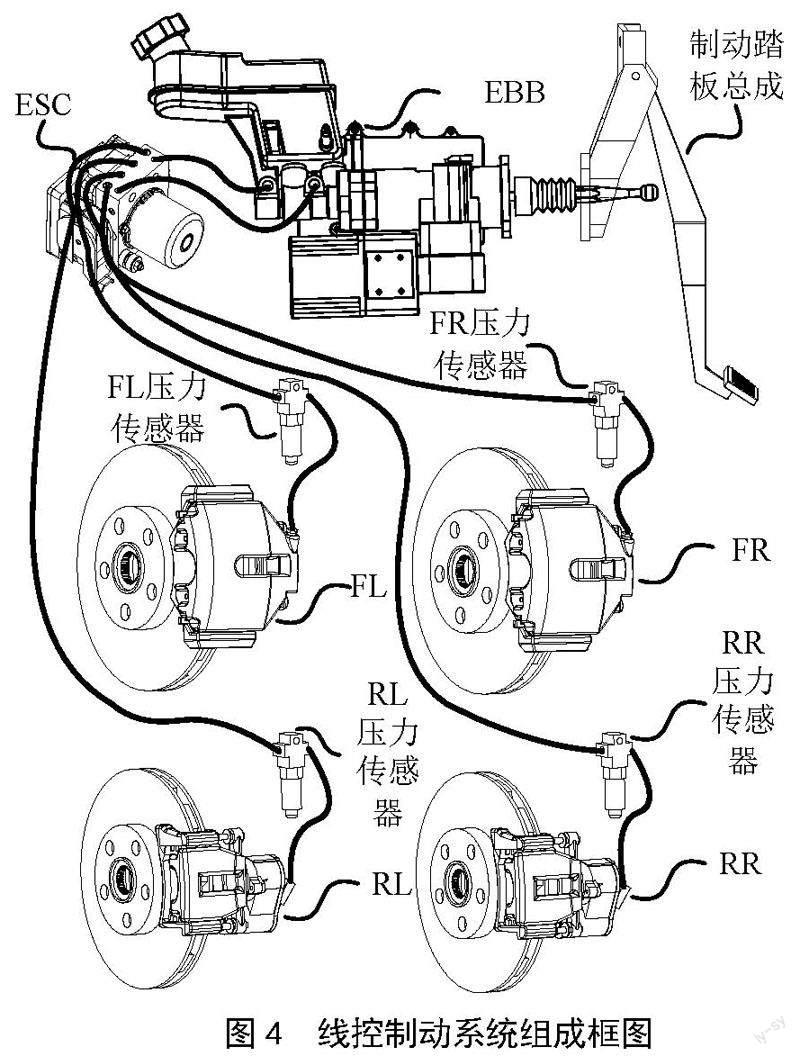
制動壓力指令由線控制動系統(tǒng)實現(xiàn)。系統(tǒng)由EBB和ESC聯(lián)合組成,如圖4所示。制動系統(tǒng)整體構(gòu)型為串聯(lián)式單主缸雙通道,X型布置,即左前輪、右后輪輪缸對應(yīng)同一制動回路,右前輪、左后輪輪缸對應(yīng)同一制動回路,如進(jìn)行制動時單一回路發(fā)生泄漏,剩余回路的制動力基本能保持正常制動力的一半。當(dāng)EBB和ESC二者均存在故障時,駕駛員踩制動踏板的腳力通過制動液傳遞至制動輪缸,實現(xiàn)機(jī)械備份制動功能。制動壓力控制范圍為0~
12 MPa。4個輪缸配置制動壓力傳感器,測量范圍0~20 MPa,測量精度為1%。兩者聯(lián)合可以實現(xiàn)助力制動、冗余制動、復(fù)合制動、失效備份制動等功能。常規(guī)制動時,助力制動、復(fù)合制動與主動制動由T-Booster實現(xiàn);ESC實現(xiàn)增壓、保壓及減壓等制動壓力調(diào)節(jié)功能,調(diào)整車輛運動狀態(tài)以滿足動力學(xué)穩(wěn)定性指標(biāo)。當(dāng)駕駛員有制動需求時,如果T-Booster出現(xiàn)故障無法實現(xiàn)助力制動,則由踏板力提供制動壓力,如果此時的制動減速度較小,且有碰撞危險,上層控制算法控制ESC建立制動壓力實現(xiàn)較高的制動減速度需求,避免或者減輕可能發(fā)生的碰撞。
3? 實驗平臺測試
3.1? 自適應(yīng)巡航功能測試
自適應(yīng)巡航(ACC)是借助車輛感知層獲取前方車輛信息,控制自車跟隨前車車速或者維持某一固定車速行駛的輔助駕駛功能,不僅可以改善車輛行駛過程的安全性和舒適性,降低駕駛員疲勞程度,而且可以提高道路利用率并減少交通擁堵。ACC按照駕駛員設(shè)定的車間時距,在保持安全距離作為首要控制目標(biāo)的前提下與前方車輛保持相同的行駛速度。圖5a為ACC試驗過程的本車車速與前車車速變化曲線,最大車速跟隨誤差為3 km/h,最小車速跟隨誤差為0.5 km/h。圖5b為跟車過程中制動壓力變化曲線,線控制動系統(tǒng)響應(yīng)迅速,能夠滿足ACC系統(tǒng)的控制需求。
3.2? 循跡功能測試
循跡控制是借助高精度定位和線控底盤系統(tǒng)對車輛行駛軌跡進(jìn)行精確控制的自動駕駛技術(shù)。可通過控制車輛的運動來減少車輛與參考軌跡之間的誤差,使車輛盡可能地按照規(guī)劃好的路徑行駛。精確的循跡控制是實現(xiàn)自動駕駛功能的重要前提。
圖6a為循跡過程中的預(yù)期軌跡與實際軌跡曲線,算法可以實現(xiàn)較準(zhǔn)確的循跡控制。圖6b為循跡控制過程中的汽車橫擺角速度和方向盤轉(zhuǎn)角曲線。從圖中可以看出,循跡控制軌跡與期望軌跡基本重合,橫向偏差最大為0.3 m;線控轉(zhuǎn)向系統(tǒng)能夠滿足循跡控制的轉(zhuǎn)向角控制需求,方向盤轉(zhuǎn)角沒有發(fā)生突變,轉(zhuǎn)向過程平緩。
3.3? 線控制動系統(tǒng)性能測試
EBB閉環(huán)建壓應(yīng)保證迅速、穩(wěn)定、準(zhǔn)確。通常用階躍響應(yīng)上升時間衡量響應(yīng)速度,用階躍響應(yīng)超調(diào)和震蕩衡量穩(wěn)定性,用液壓控制的均方根誤差衡量準(zhǔn)確性。為了驗證EBB建壓性能,分別進(jìn)行了階躍信號和連續(xù)階躍信號的壓力跟隨性能測試。階躍測試為從0 Mpa建立起10 MPa期望壓力;連續(xù)階躍信號測試初始壓力1 MPa,之后期望壓力每間隔
4 s分別增加至2 MPa、4 MPa和6 MPa。
圖7a為階躍信號壓力跟隨測試結(jié)果,EBB從
0 MPa建立起10 MPa壓力耗時約250 ms,低于傳統(tǒng)制
動系統(tǒng)約400 ms的制動壓力建立時間,滿足GB 21670—2008《乘用車制動系統(tǒng)技術(shù)要求及試驗方法》關(guān)于“從開始操縱控制裝置至最不利車軸上的制動力達(dá)到規(guī)定制動效能所經(jīng)歷的時間不
應(yīng)超過0.6 s”的規(guī)定;到達(dá)期望壓力后,壓力跟隨
均方根誤差為0.14 MPa。
圖7b為連續(xù)階躍信號測試結(jié)果,實際壓力曲
線在期望壓力處存在一定的波動,隨后與期望壓力
的最大穩(wěn)態(tài)誤差小于0.3 MPa,壓力跟隨全過程均方根誤差為0.16 MPa。結(jié)果表明,EBB系統(tǒng)的建壓性能能夠滿足自動駕駛汽車實驗教學(xué)平臺的設(shè)計
需求。
4? 結(jié)束語
本文針對交通與汽車類專業(yè)實踐課程體系與前沿技術(shù)脫離的問題,為使學(xué)生能夠直觀且深入地學(xué)習(xí)和理解自動駕駛技術(shù),提出了一種以快速控制原型技術(shù)為基礎(chǔ),具備實現(xiàn)環(huán)境感知、自主決策與執(zhí)行器控制三大關(guān)鍵功能條件的自動駕駛汽車實驗教學(xué)平臺。平臺具有完全開放的感知層(環(huán)境感知及車身狀態(tài)感知系統(tǒng))、決策層(上層控制系統(tǒng))和執(zhí)行層(底層執(zhí)行系統(tǒng)),支持CAN和LIN等多種接口,可以滿足多傳感器環(huán)境感知融合、高級駕駛輔助、自動駕駛、人機(jī)共駕、線控底盤等算法的教學(xué)和課程設(shè)計需求。結(jié)合MATLAB/Simulink、Prescan和CarSim等車輛仿真模擬軟件,能夠?qū)崿F(xiàn)不同環(huán)境、不同車輛、不同控制策略下的仿真測試,并且可以進(jìn)行駕駛員在環(huán)測試,體驗不同自動駕駛功能的實際作用方式,驗證人機(jī)共駕功能。學(xué)生通過在該平臺上進(jìn)行功能設(shè)計和實驗操作,可以有效提升學(xué)習(xí)興趣與主動性,增強(qiáng)創(chuàng)新實踐能力,成為學(xué)術(shù)與工程并重的復(fù)合型人才。
5? 參考文獻(xiàn)
[1] 雍加望,馮能蓮,陳寧.自動駕駛汽車硬件在環(huán)仿真實
驗平臺研發(fā)[J].實驗技術(shù)與管理,2021,38(2):127-131,
135.
[2] Liu Tianbi, Du Shanshan, Liang Chenchen, et al.
A Novel Multi-Sensor Fusion Based Object Detection
and Recognition Algorithm for Intelligent Assisted
Driving[J].IEEE Access,2021,9:81564-81574.
[3] Jin C, Maitland A, McPhee J. Hierarchical nonlinear
moving horizon estimation of vehicle lateral speed
and road friction coefficient[J].ASME Letters in
Dynamic Systems and Control,2021,1(1):011005-1~
011005-5.
[4] Roland K, Paul P, Mathias B. Vehicle-in-the-Loop:
Augmenting Real-World Driving Tests with Virtual
Scenarios in Order to Enhance Validation of Active
Safety Systems[J].ATZ worldwide,2017(9):52-55.
[5] 花威,史庭俊,呂強(qiáng).基于模型在環(huán)仿真的自動駕駛虛
擬測試平臺[J].電子技術(shù)與軟件工程,2021(8):144-148.
[6] 趙祥模,承靖鈞,徐志剛,等.基于整車在環(huán)仿真的自
動駕駛汽車室內(nèi)快速測試平臺[J].中國公路學(xué)報,2019,
32(6):124-136.
[7] 馬志成,王立,李志斌.自動駕駛整車在環(huán)仿真平臺研
究及模擬實現(xiàn)[J].汽車實用技術(shù),2020(3):34-38.
[8] 王潤民,趙祥模,徐志剛,等.一種自動駕駛整車在環(huán)
虛擬仿真測試平臺設(shè)計[J].汽車技術(shù),2022(4):1-7.
項目來源:北京工業(yè)大學(xué)教育教學(xué)研究課題“面向汽車電控與智能汽車兩門課程的教學(xué)實踐平臺建設(shè)研究”(ER2022SJB
08);國家自然科學(xué)基金青年項目“汽車一體化線控制動系統(tǒng)深度耦合機(jī)理及其多目標(biāo)博弈控制方法研究”(52002009);北京市自然科學(xué)基金面上項目“智能網(wǎng)聯(lián)電動汽車電液復(fù)合制動機(jī)理及運動優(yōu)化控制方法研究”(3222003)。
作者簡介:雍加望,通信作者,講師;馮能蓮,教授。
