基于單片機(jī)的玉米補(bǔ)種系統(tǒng)設(shè)計(jì)
2023-11-02 14:41:53張亞芳許光彬
張亞芳 許光彬
摘要:通過對(duì)玉米播種機(jī)的實(shí)際生產(chǎn)過程進(jìn)行研究,發(fā)現(xiàn)玉米播種機(jī)在播種過程中會(huì)出現(xiàn)漏種以及卡機(jī)的現(xiàn)象,導(dǎo)致播種的質(zhì)量無法得到有效保障。為了在玉米播種過程中有效地進(jìn)行播種量檢測(cè)和及時(shí)補(bǔ)種,開發(fā)了基于單片機(jī)的玉米補(bǔ)種系統(tǒng)。該系統(tǒng)采用STC89C51單片機(jī)作為控制核心,通過安裝傳感器檢測(cè)車輪行進(jìn)狀態(tài)和玉米播種狀態(tài),在發(fā)現(xiàn)異常后通過步進(jìn)電機(jī)驅(qū)動(dòng)器電路驅(qū)動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一格補(bǔ)種槽的角度,進(jìn)行玉米的補(bǔ)種,避免了后期人力進(jìn)行檢查以及補(bǔ)種,提高了生產(chǎn)效率。測(cè)試結(jié)果表明,系統(tǒng)的準(zhǔn)確性和穩(wěn)定性能滿足設(shè)計(jì)需求。
關(guān)鍵詞:補(bǔ)種,單片機(jī),自動(dòng)化
中圖分類號(hào):TP391
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1674-9545(2023)03-0076-(05)
DOI:10.19717/j.cnki.jjun.2023.03.015
玉米是世界上分布最廣泛的糧食作物之一,在我國(guó)各地均有栽培。玉米的播種方式從最初的人工點(diǎn)播發(fā)展到用機(jī)械播種,工作效率顯著提高,也更加適用于大面積種植。隨著科學(xué)技術(shù)的進(jìn)步,精密播種成為當(dāng)前玉米播種技術(shù)的主要方式,實(shí)現(xiàn)了對(duì)播種量和株距的精確控制,具有節(jié)省種子提高產(chǎn)量的優(yōu)點(diǎn)。在免耕且有秸稈覆蓋的地表施肥播種時(shí),在免耕覆蓋地上使用時(shí),其滑移率在20%以上,造成不排種肥不均勻或者排種不暢的問題。隨著國(guó)家對(duì)精密播種技術(shù)的推廣力度不斷加大,科研工作人員對(duì)精密播種中的電子監(jiān)控技術(shù)進(jìn)行研發(fā)。由于監(jiān)控系統(tǒng)不夠成熟,而且無法保證系統(tǒng)工作的可靠性,加之新技術(shù)成本太高,因此研究主要局限在監(jiān)控器的研究和試驗(yàn)上,在實(shí)際使用中沒有得到很多的推廣[1]。精密播種的特點(diǎn)是單粒播種,具有省種的優(yōu)點(diǎn),但是實(shí)際播種過程中容易造成實(shí)際播量與最優(yōu)播量的誤差,主要原因是播量分布不均勻、漏播的現(xiàn)象,從而對(duì)產(chǎn)量造成影響[2]。目前,國(guó)內(nèi)外對(duì)漏播補(bǔ)償進(jìn)行相關(guān)研究并研制了精密播種機(jī)排種器自動(dòng)監(jiān)控系統(tǒng),實(shí)現(xiàn)了對(duì)精密播種機(jī)的漏播情況進(jìn)行報(bào)警、計(jì)數(shù)等方面的監(jiān)控[3],但只能對(duì)漏播、少播實(shí)現(xiàn)監(jiān)控,整機(jī)不能解決其他因素(例如:地況)及時(shí)協(xié)同其他機(jī)構(gòu)進(jìn)行有效補(bǔ)償。該設(shè)計(jì)通過對(duì)玉米播種問題的影響因素分析,采用自動(dòng)控制原理的學(xué)科知識(shí),結(jié)合單片機(jī)控制原理和電機(jī)控制原理,通過在車輪上加裝光柵碼盤,配合光電計(jì)數(shù)開關(guān)傳感器,實(shí)時(shí)采集車輛行駛的速度。然后在玉米下料導(dǎo)軌槽上增加紅外計(jì)數(shù)檢測(cè)開關(guān),用來判斷檢測(cè)時(shí)間點(diǎn)是否有玉米粒通過,在發(fā)現(xiàn)異常后通過步進(jìn)電機(jī)驅(qū)動(dòng)器電路驅(qū)動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一格補(bǔ)種槽的角度,進(jìn)行玉米的補(bǔ)種[4]。實(shí)現(xiàn)在玉米播種機(jī)出現(xiàn)異常或未合理播種的情況下進(jìn)行有效檢測(cè),并進(jìn)行補(bǔ)種的操作。該設(shè)計(jì)的玉米補(bǔ)種系統(tǒng),能夠有效地提高玉米播種質(zhì)量,減少不必要的人工補(bǔ)種成本,并且系統(tǒng)采用商業(yè)化的51單片機(jī)系統(tǒng),價(jià)格低廉,具有很高的實(shí)際應(yīng)用價(jià)值[5]。
1系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
基于單片機(jī)的玉米補(bǔ)種系統(tǒng)包括前端采集傳感器電路、數(shù)據(jù)控制處理系統(tǒng)和動(dòng)作執(zhí)行電機(jī)系統(tǒng),如圖1所示。
(1)前端采集傳感器電路。前端采集傳感器主要負(fù)責(zé)采集車輛的行進(jìn)速度和玉米的播種個(gè)數(shù),行進(jìn)速度用來判斷單位播種長(zhǎng)度內(nèi)是否進(jìn)行了正常的播種。玉米播種個(gè)數(shù)檢測(cè)用來判斷播種的數(shù)量是否與設(shè)定的播種數(shù)量一致,如果有缺失則需要進(jìn)行補(bǔ)種。傳感器的整體穩(wěn)定性與采集的準(zhǔn)確性在整個(gè)系統(tǒng)中至關(guān)重要,所以在車輛行駛速度的采集上,該設(shè)計(jì)放棄了結(jié)構(gòu)更加簡(jiǎn)單的霍爾傳感器,因?yàn)榛魻杺鞲衅魅菀资盏酱艌?chǎng)的干擾,導(dǎo)致誤檢測(cè),進(jìn)而選擇了穩(wěn)定性更好的機(jī)械式光柵碼盤加光電傳感器的形式[6]。玉米計(jì)數(shù)采用紅外光電檢測(cè)開關(guān),這種檢測(cè)傳感器結(jié)構(gòu)簡(jiǎn)單、可靠性高、價(jià)格低廉。前端采集電路中,光電傳感器安裝在排種盤壁處上。玉米精密播種機(jī)在播種作業(yè)過程中,如果檢測(cè)到有種子下落,紅外傳感器的發(fā)射器發(fā)出紅外光束會(huì)受到種子的遮擋導(dǎo)致接收器接收不到信號(hào);如果沒有檢測(cè)到種子下落,接收器能夠接收發(fā)射器發(fā)出的紅外光束,轉(zhuǎn)換成電信號(hào)傳輸?shù)絾纹瑱C(jī)的捕獲、比較端口,從而實(shí)現(xiàn)了播種狀態(tài)的檢測(cè)。單片機(jī)計(jì)數(shù)器通過統(tǒng)計(jì)端口捕獲次數(shù)進(jìn)行計(jì)數(shù)[7]。
(2)數(shù)據(jù)控制處理系統(tǒng)。數(shù)據(jù)控制處理系統(tǒng)中,采用STC89C51單片機(jī)作為控制核心,通過接收和處理前端采集傳感器的信號(hào),判斷播種狀態(tài)是否正常,檢測(cè)播種過程中的漏播以及播種通道堵塞等情況,在發(fā)現(xiàn)異常后單片機(jī)控制核心對(duì)這些異常狀態(tài)進(jìn)行有效處理,通過步進(jìn)電機(jī)驅(qū)動(dòng)器電路驅(qū)動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng)一格補(bǔ)種槽的角度,進(jìn)行玉米的補(bǔ)種,在單片機(jī)軟件開發(fā)中基于一定的數(shù)學(xué)模型計(jì)算算法,對(duì)于漏種進(jìn)行補(bǔ)償,對(duì)于異常情況下的堵轉(zhuǎn)狀況啟動(dòng)聲光報(bào)警電路工作,提醒工作人員下車進(jìn)行檢查和維修,確保玉米播種機(jī)能夠有效工作以及玉米播種工作的高效性[8]。
(3)動(dòng)作執(zhí)行電機(jī)系統(tǒng)。補(bǔ)種機(jī)構(gòu)及驅(qū)動(dòng)電路中,在主排種裝置外增加一套獨(dú)立的補(bǔ)種裝置,如果檢測(cè)到漏播現(xiàn)象,單片機(jī)根據(jù)補(bǔ)種過程各動(dòng)作時(shí)間關(guān)系,適時(shí)驅(qū)動(dòng)補(bǔ)種電機(jī)將待補(bǔ)的種子排出,實(shí)現(xiàn)自動(dòng)補(bǔ)種。考慮到對(duì)電機(jī)角度控制有較高的要求,補(bǔ)種電機(jī)采用步進(jìn)電機(jī)。步進(jìn)電機(jī)能夠有效地控制轉(zhuǎn)動(dòng)角度,進(jìn)而控制補(bǔ)種輪轉(zhuǎn)動(dòng)的角度,玉米粒在轉(zhuǎn)動(dòng)輪上是等距離分布的,轉(zhuǎn)動(dòng)的角度直接控制了補(bǔ)種的玉米的個(gè)數(shù)多少[9],因此可以精確控制補(bǔ)種系統(tǒng)排種裝置的轉(zhuǎn)速和轉(zhuǎn)角。補(bǔ)種電機(jī)轉(zhuǎn)速可以根據(jù)播種機(jī)的原有主播裝置檔位(株距)設(shè)置與主播器一致的不同的階梯轉(zhuǎn)速并由控制系統(tǒng)分級(jí)控制。
2系統(tǒng)硬件設(shè)計(jì)
2.1單片機(jī)核心電路設(shè)計(jì)
單片機(jī)最小系統(tǒng)的主要核心就是STC89C51芯片,采用的是四十引腳的DIP封裝,其核心電路設(shè)計(jì)如圖2所示。P0組引腳連接液晶屏LCD1602,P1組引腳連接步進(jìn)電機(jī)和聲光報(bào)警部分,紅外光電傳感器信號(hào)連接至P3中斷引腳。LCD1602顯示屏采用并行通訊,主要通過八個(gè)數(shù)據(jù)位來進(jìn)行數(shù)據(jù)的傳輸,并且配合讀寫控制引腳、使能控制引腳以及命令數(shù)據(jù)控制引腳進(jìn)行數(shù)據(jù)的傳輸,傳輸?shù)絻?nèi)部的控制器,驅(qū)動(dòng)點(diǎn)陣進(jìn)行實(shí)時(shí)的掃描顯示。
2.2電源電路設(shè)計(jì)
該設(shè)計(jì)需要將拖拉機(jī)的12V電源降壓至5V供給單片機(jī)芯片,作為單片機(jī)的工作電源,因此選擇降壓電路。常見的電源轉(zhuǎn)換電路有LDO和DC-DC電路等。LDO即低壓差線性穩(wěn)壓器,僅能使用在降壓應(yīng)用中,有著穩(wěn)定性好,負(fù)載響應(yīng)快,輸出紋波小等優(yōu)點(diǎn),但其缺點(diǎn)是效率低,輸入輸出的電壓差不能太大,負(fù)載不能太大。DC-DC指直流電壓轉(zhuǎn)直流電壓,目前多指開關(guān)電源,其優(yōu)點(diǎn)是效率高,可以輸出大電流,輸入電壓范圍較寬。綜上考慮,在實(shí)際應(yīng)用中選擇DC-DC電路作為電源電路,其電路設(shè)計(jì)如圖3所示,主要由控制芯片、電感線圈、二極管、電容等構(gòu)成。
2.3光電對(duì)射傳感器電路設(shè)計(jì)
光電傳感器電路設(shè)計(jì)如圖4所示。實(shí)際使用中選用ITR9608光電對(duì)射傳感器,通過紅外光電效應(yīng)對(duì)開啟關(guān)斷信號(hào)量進(jìn)行采集。兩個(gè)二極管通過封裝進(jìn)行固定,形成頭對(duì)頭的結(jié)構(gòu),當(dāng)發(fā)光二極管發(fā)射光時(shí),中間如果沒有障礙物遮擋,接收的二極管就能接收到光,內(nèi)部的PN結(jié)導(dǎo)通,配合使用光刪,可以完成更加準(zhǔn)確的計(jì)數(shù)功能。發(fā)光二極管電路中通過1KΩ的電阻進(jìn)行限流,從而保證發(fā)光二極管正常工作,不被燒毀。接收二極管端接入10KΩ的上拉電阻,確保光敏二極管在沒有接受到光的情況下會(huì)被上拉成高電平,使得輸出為高電平,當(dāng)在有光的情況下光敏二極管導(dǎo)通,進(jìn)而輸出端被下拉到低電平,形成高低電平的變化。這樣的脈沖信號(hào)會(huì)傳到單片機(jī)進(jìn)行計(jì)數(shù)采集。考慮到接收二極管端的信號(hào)受到光敏二極管壓降的影響,低電平可能略高于零伏,高電平略低于輸入電壓,從而使得輸出的信號(hào)電壓不是很完美,因此后端增加比較器電路,可以有效保證波形更加清晰,使得輸出波形更加完整有效。
2.4步進(jìn)電機(jī)電路設(shè)計(jì)
步進(jìn)電機(jī)電路設(shè)計(jì)如圖5所示,驅(qū)動(dòng)電路采用四個(gè)光耦形成通訊隔離,確保系統(tǒng)的穩(wěn)定性,隔離驅(qū)動(dòng)回路將干擾源引入控制系統(tǒng)。大電流驅(qū)動(dòng)器采用IGBT搭建正反向電流驅(qū)動(dòng)電路,控制步進(jìn)電機(jī)的工作。步進(jìn)電機(jī)選擇12V供電電源的系統(tǒng),可以直接使用拖拉機(jī)的12V電源輸出,不需要再額外增加電源,極為方便有效。28BYJ30-7A步進(jìn)電機(jī)能夠產(chǎn)生0.7 N.m的扭矩,符合轉(zhuǎn)動(dòng)補(bǔ)種輪盤的需求。當(dāng)單片機(jī)控制引腳輸入1,0,0,0時(shí),U7導(dǎo)通,進(jìn)而Q4關(guān)閉,Q5導(dǎo)通,與Q4和Q5連接的步進(jìn)電機(jī)引腳為低電平;同理U10關(guān)閉,Q3導(dǎo)通,Q6關(guān)閉,與Q3和Q6連接的步進(jìn)電機(jī)引腳為高電平,以此類推,實(shí)現(xiàn)弱電信號(hào)控制強(qiáng)電動(dòng)作,進(jìn)而實(shí)現(xiàn)步進(jìn)電機(jī)的工作。
3系統(tǒng)軟件設(shè)計(jì)
3.1系統(tǒng)軟件總體設(shè)計(jì)
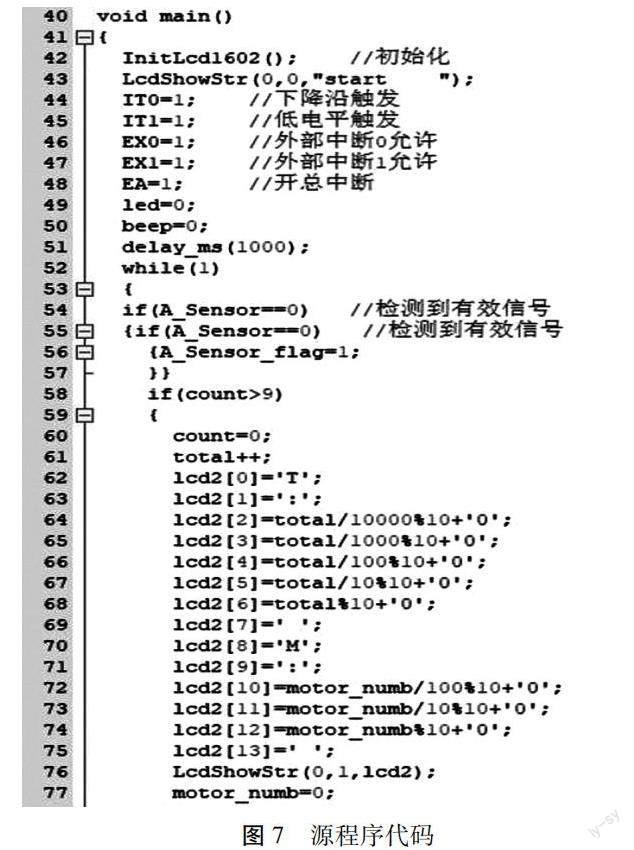
玉米補(bǔ)種系統(tǒng)的軟件總體設(shè)計(jì)思路是,首先通過車輪檢測(cè)設(shè)備檢測(cè)車輪是否處于正常行駛狀態(tài),當(dāng)車輪處于正常工作狀態(tài)時(shí),經(jīng)過0.5s對(duì)播種玉米數(shù)進(jìn)行檢測(cè)并記錄,如果檢測(cè)到?jīng)]有玉米進(jìn)行播種,記錄漏播種子數(shù),在程序設(shè)計(jì)中設(shè)置玉米漏種標(biāo)志位加一,程序主函數(shù)部分如圖7所示。當(dāng)檢測(cè)到玉米補(bǔ)種標(biāo)志位的數(shù)值≥3的時(shí)候,則認(rèn)為玉米播種機(jī)出現(xiàn)故障,可能出現(xiàn)通道堵塞或者輪盤卡死等現(xiàn)象,已經(jīng)不能正常進(jìn)行工作,此時(shí)開啟蜂鳴器和報(bào)警燈進(jìn)行聲光報(bào)警,提醒操作人員及時(shí)停止進(jìn)行檢查或者安排維修人員進(jìn)行維修。整體的報(bào)警檢測(cè)以3次為一個(gè)周期,只要三次中的任何一次能夠檢測(cè)到有玉米粒流出,則認(rèn)為播種機(jī)器只是漏播,沒有出現(xiàn)通道堵塞或者輪盤卡死等嚴(yán)重現(xiàn)象,這時(shí)會(huì)將漏種標(biāo)志位清零,重新開始統(tǒng)計(jì)。在單片機(jī)數(shù)據(jù)端采用外部中斷的形式進(jìn)行車輪轉(zhuǎn)速和玉米計(jì)數(shù)傳感器的采集,這種方式可以保證采集的準(zhǔn)確性與有效性。顯示屏顯示播種數(shù)量、補(bǔ)種數(shù)量、當(dāng)前狀態(tài)和時(shí)鐘,方便人機(jī)交互,觀察設(shè)備的工作狀態(tài)以及判斷玉米播種設(shè)備的整體工作效率等。該系統(tǒng)使用keil開發(fā)環(huán)境。
3.2部分核心代碼設(shè)計(jì)
3.2.1主程序代碼部分 結(jié)合玉米補(bǔ)種系統(tǒng)的軟件總體設(shè)計(jì)流程圖給出了軟件開發(fā)的主程序代碼,如圖7所示。LCD1602顯示屏軟件驅(qū)動(dòng)首先需要對(duì)控制的引腳進(jìn)行初始化,對(duì)于并行控制引腳采用整體初始化,有利于程序的簡(jiǎn)化和執(zhí)行效率,然后對(duì)顯示屏的對(duì)比度、顯示樣式等參數(shù)進(jìn)行初始設(shè)置,設(shè)置完成后就可以將對(duì)應(yīng)的顯示數(shù)據(jù)寫入到顯示寄存器中,進(jìn)行數(shù)據(jù)的實(shí)時(shí)顯示[8]。寫入數(shù)據(jù)包含橫坐標(biāo)、縱坐標(biāo)和顯示數(shù)組三個(gè)參數(shù)。LCD1602顯示屏具有價(jià)格低廉,使用壽命長(zhǎng),工作溫度范圍廣的特點(diǎn),廣泛使用在工業(yè)控制中,具有現(xiàn)在彩屏所無法比擬的性價(jià)比[9]。
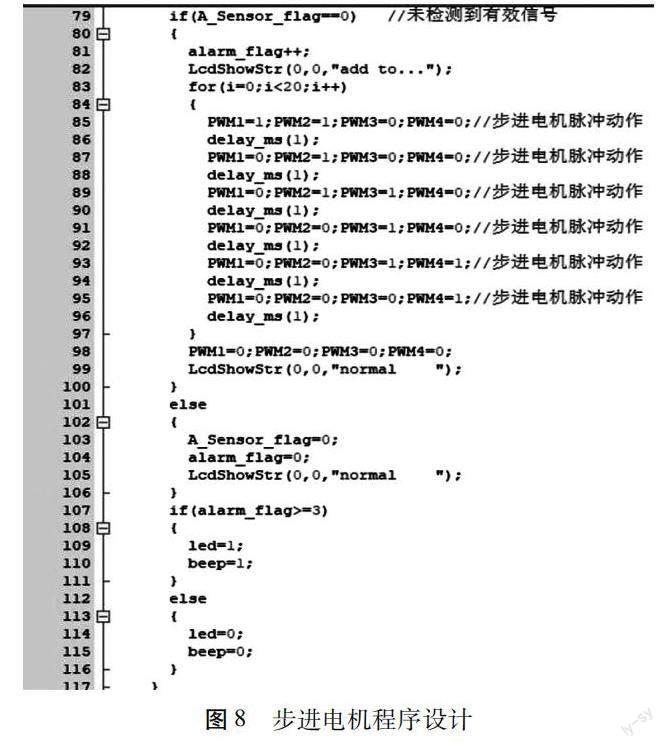
3.2.2步進(jìn)電機(jī)程序設(shè)計(jì) 該設(shè)計(jì)采用的是四線步進(jìn)電機(jī),步進(jìn)電機(jī)采用脈沖交替動(dòng)作形成位移運(yùn)動(dòng),一個(gè)脈沖循環(huán)周期產(chǎn)生六個(gè)有規(guī)律的脈沖,具體程序設(shè)計(jì)如圖8所示。
4系統(tǒng)仿真與測(cè)試
4.1繪制系統(tǒng)仿真電路
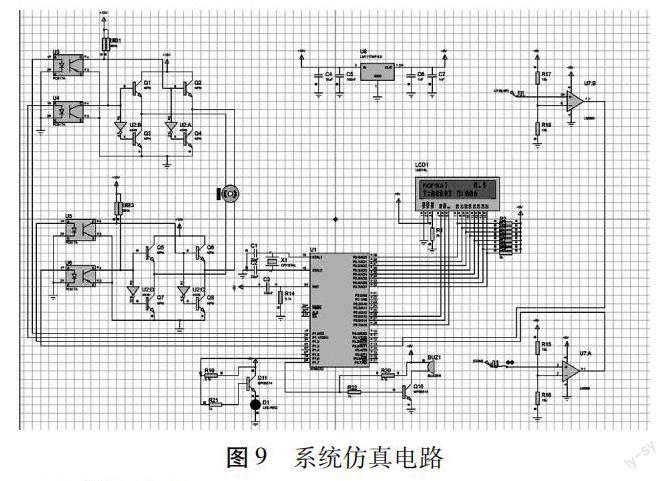
通過使用Proteu仿真軟件繪制系統(tǒng)仿真電路原理圖,考慮到部分實(shí)際元器件在仿真軟件中找不到模型,在仿真電路中使用了等效元件替換,對(duì)仿真結(jié)果沒有影響。其中電源電路部分使用LDO電路代替DC-DC電路, 步進(jìn)電機(jī)驅(qū)動(dòng)電路中采用三極管代替IGBT,光電傳感器信號(hào)使用脈沖信號(hào)源代替,具體仿真電路如圖9所示。
4.2系統(tǒng)測(cè)試
基于單片機(jī)的玉米補(bǔ)種系統(tǒng)已經(jīng)在Proteus軟件中進(jìn)行了仿真測(cè)試。首先在keil軟件中編寫源代碼,并編譯生成hex文件。在Proteus軟件中繪制好仿真電路后,雙擊AT89C52芯片,寫入生成的hex文件。點(diǎn)擊開始仿真按鈕,合上脈沖信號(hào)源開關(guān),模擬正常播種,此時(shí)液晶顯示屏顯示“normal”字樣,表示正常,如圖9所示。同時(shí)記錄并顯示正常播種的粒數(shù)。斷開脈沖信號(hào)源開關(guān),模擬漏播情況,當(dāng)發(fā)生漏播時(shí),驅(qū)動(dòng)電機(jī)電機(jī)進(jìn)行補(bǔ)種,當(dāng)連續(xù)漏播粒數(shù)達(dá)到3粒或6秒時(shí),此時(shí)蜂鳴器和報(bào)警燈開始工作,進(jìn)行聲光報(bào)警,模擬玉米播種機(jī)出現(xiàn)故障,可能出現(xiàn)通道堵塞或者輪盤卡死等現(xiàn)象,已經(jīng)不能正常進(jìn)行工作,提醒操作人員及時(shí)停車進(jìn)行檢查或者安排維修人員進(jìn)行維修。
5結(jié)語
文章設(shè)計(jì)的基于單片機(jī)的玉米補(bǔ)種系統(tǒng),采用先進(jìn)的單片機(jī)控制系統(tǒng)控制核心,可以實(shí)現(xiàn)玉米的智能檢測(cè),進(jìn)而判斷播種過程中的漏播以及播種通道堵塞等情況,通過單片機(jī)處理核心對(duì)這些異常狀態(tài)進(jìn)行有效的處理,并基于一定的數(shù)學(xué)模型計(jì)算算法,對(duì)于漏種進(jìn)行補(bǔ)償,對(duì)于異常情況下的堵轉(zhuǎn)狀況采用有效的報(bào)警裝置,提醒工作人員進(jìn)行維修檢查,確保玉米播種機(jī)能夠有效地完成玉米播種工作以及玉米播種工作的高效性。設(shè)計(jì)時(shí)考慮到了系統(tǒng)的穩(wěn)定性以及商業(yè)的可推廣性,在元器件選型上選擇了更加耐用且性價(jià)比高的元件,在控制系統(tǒng)的搭建上選擇了魯棒性好的步進(jìn)電機(jī),并搭配有人機(jī)交互顯示屏,方便人員的操作以及學(xué)習(xí)使用,符合現(xiàn)在商業(yè)推廣的設(shè)備需求,并且能夠有效提高玉米的播種效果,具有極高的商業(yè)價(jià)值。
參考文獻(xiàn):
[1]張平華.基于虛擬儀器的精密排種器漏播檢測(cè)及補(bǔ)償技術(shù)研究[D].武漢:華中農(nóng)業(yè)大學(xué),2006.
[2]趙家書.玉米精密播種機(jī)監(jiān)控系統(tǒng)研究[D].長(zhǎng)春:吉林大學(xué).2012.
[3]鄭送軍.精密播種機(jī)排種器自動(dòng)監(jiān)控系統(tǒng)研究[D].陜西:大西北農(nóng)林科技學(xué),2007.
[4]Yang L,Yan B,Cui T,et al. Global overview of research progress and development of precision maize planters[J].International journal of agricultural and biological engineering,2016,9(1):9.
[5]楊長(zhǎng)江,孟志軍,梅鶴波,等.玉米精量播種檢測(cè)系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J] .農(nóng)機(jī)化研究,2018,41(4):80.
[6]吳南.玉米免耕播種機(jī)漏播補(bǔ)償方法對(duì)比研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2020,51(S2):41.
[7]黃河,曾欣.基于單片機(jī)的玉米智能播種機(jī)設(shè)計(jì)和研究[J].農(nóng)機(jī)化研究,2018,40(5):201.
[8]Lu Y,Zhang X,Chen S,et al. Increasing the planting uniformity improves the yield of summer maize[J].Agronomy journal,2017,109(4):1463.
[9]孟鵬祥.玉米精密播種機(jī)智能監(jiān)控系統(tǒng)的研究[D].淄博:山東理工大學(xué).2016.
(責(zé)任編輯 寧樊西)
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
中國(guó)科技博覽(2016年19期)2016-10-19 14:47:24
中國(guó)科技博覽(2016年19期)2016-10-19 13:40:37
中國(guó)科技博覽(2016年18期)2016-10-19 07:01:13
中國(guó)市場(chǎng)(2016年36期)2016-10-19 03:40:15
科技視界(2016年20期)2016-09-29 14:13:02
 九江學(xué)院學(xué)報(bào)(自然科學(xué)版)2023年3期
九江學(xué)院學(xué)報(bào)(自然科學(xué)版)2023年3期
- 九江學(xué)院學(xué)報(bào)(自然科學(xué)版)的其它文章
- 聯(lián)合電針治療對(duì)腹部術(shù)后患者腸胃功能恢復(fù)的臨床研究
- 基于壓力交易理論視角下護(hù)士醫(yī)療人工智能采納意愿研究
- HFOV、LISA/MIST技術(shù)在蒙特勒標(biāo)準(zhǔn)的新生兒急性呼吸窘迫綜合(NARDS)中的應(yīng)用研究
- 孕產(chǎn)婦全周期健康管理平臺(tái)應(yīng)用對(duì)孕產(chǎn)婦妊娠結(jié)局的影響
- 去甲腎上腺素聯(lián)合烏司他丁對(duì)膿毒癥患者血清內(nèi)皮損傷指標(biāo)及炎性因子水平的影響
- 凋亡蛋白Caspase-9/Caspase-3在慢性間歇性低氧模型小鼠肝損傷中的作用