基于三維激光掃描技術的大壩安全監測方法研究
2023-11-09 03:09:22郜士彬沈宗覬保振永
水利技術監督 2023年10期
郜士彬,王 康,沈宗覬,保振永
(中國電建集團昆明勘測設計研究院,云南 昆明 650000)
1 研究背景
目前我國注冊備案大壩共663座,超過5100億m3的庫容,壩高超過100m的有152座,超過200m的有17座,主要有重力壩、土石壩、拱壩和混合壩等類型,大壩安全監測貫穿大壩建設、竣工運營、維護各個階段。傳統的變形監測方法以“點”式監測為主,儀器多用全站儀、GNSS、經緯儀等。傳統手段測點精度高,但是獲取局部點位信息,對于復雜地形的變形監測,布點數量增加,監測成本增加,有些滑坡地形非常危險,不便于布設監測點,加上監測點很容易隨著變形體破壞。葛山運[1]、羅江運用GPS/BDS組合定位方法在大壩安全監測上,譚林使用三頻GPS組合精密單點定位技術(PPP)進行大壩變形監測方法研究,崔鵬飛利用GNSS和測量機器人組合的方法進行大壩安全監測研究,郭保、李小偉等研究了多基站GNSS自動化大壩變形監測方法,劉千駒研究了小波函數提高大壩變形監測數據質量中的應用,李明使用精度優于傳統統計模型的BP網絡預測模型來表征變形趨勢,孫志豪利用SBAS監測方法對大壩不同區域的沉降量與變形速率進行監測。近年來,開始研究基于三維激光掃描技術的變形監測方法。通過非接觸的方式進行獲取變形體表面的點云數據和影像數據,該方式可以快速獲取海量變形體的連續點云數據,梁沖、李慶松等提出了一種機載LIDAR和多波束系統組合方法獲取水上水下地形數據的解決方案,吳運通、范泯進、楊傳訓等研究了三維激光掃描技術在大壩變形監測上的應用方法。
基于三維激光掃描技術的大壩安全監測方法,是通過不同周期觀測,進行點、線、面多期數據對比分析,從而達到監測分析變形體整體的一個變形趨勢和規律,制定相應的預防和整改措施。本文提出使用三維激光掃描技術,定期對土石大壩進行掃描獲取點云數據,利用Hausdorff距離法進行多期點云變形分析,運用色譜統計變形量。本文結合糯扎渡項目研究三維激光掃描技術在大壩變形監測中的應用效果。
2 技術路線
大壩變形是一個緩慢而持續的過程,需要對大壩變形監測制定最佳掃描方案。本文采用澳大利亞MAPtek生產的I-SITE8810三維激光掃描儀,在大壩L3-L8測線進行三維激光掃描設站點布設,以電廠GNSS及視準線監測的工作基點作為激光掃描監測控制點。三維激光掃描儀觀測應選擇天氣良好情況下進行,將三維激光掃描儀依次分別架設在觀測墩上,在觀測期內對大壩迎水面和背水面邊坡及兩岸邊坡進行三維掃描觀測,如圖1所示。三維激光掃描主要技術流程:(1)控制測量,包含選點、埋設、觀測、計算、檢查及整理成果;(2)外業數據采集,包含踏勘、準備、掃描站點布設、三維激光掃描、數據下載存儲、外業資料整理;(3)點云數據拼接,包含點云坐標轉換、點云配準、平差報告、點云導出和數據整理等;(4)點云數據處理,包含點云去噪、點云分類、點云抽稀和分割等;(5)三維模型建立,包含構建三角網、漏洞編輯處理、拓撲編輯、檢查和成果整理等;(6)紋理貼圖,包含照片采集、勻光勻色、貼圖、檢查和成果歸檔。

圖1 大壩三維測站布設圖
2.1 布設站點
測站點的選擇是三維測量中非常重要的環節,測站點的坐標精度直接影響了三維測量數據的質量精度,要選擇密度均勻、距離適中的高精度控制點或者長時間監測的基點觀測墩作為三維激光掃描儀的設站點。2018年三維掃描測量項目為了能夠和2016年的三維掃描測量數據良好銜接,所以2018年兩期測站點的設置與2016年的三維掃描設站點一樣,共設測站點10個。如圖2所示。

圖2 大壩掃描工作示意圖
2.2 數據采集
數據采集嚴格遵循以下步驟作業:(1)在壩體部分表面點上安裝標志牌,并用全站儀精確獲取坐標;(2)壩體及扁鋼掃描距離控制在100m范圍內;(3)同一測站,為確保數據質量的可靠性,采用反復觀測兩測回的方式進行;(4)在后視點的選擇過程中,找準相對較遠的控制點,以減少后視誤差;(5)選取大氣穩定,日照適中的觀測時間進行點云數據采集,保證了點云精度質量及色彩質量;(6)未在逆光條件下進行觀測;(7)根據三維激光掃描儀檢驗的結果進行精度驗證和誤差改正。
2.3 測站精度驗證
測站精度主要分為內符合精度和外符合精度。
內符合精度主要指同一測站不同時刻測量同一目標時,兩期數據間的內符合程度。在本項目中,采用L5-GTP-08_HY_C8L測站所觀測的同期兩測站數據進行內符合精度的評定驗證,截取測站相同觀測范圍的兩期數據點云文件,通過數據過濾分類,得到壩面觀測點云文件,在同一位置切取部分點云進行建模分析,如圖3—4所示。

圖3 L5-GTP-08_HY_C8L02點云數據

圖4 L5-GTP-08_HY_C8L01點云數據
采用專業數據處理軟件進行點之間的分析對比如圖5—6所示。
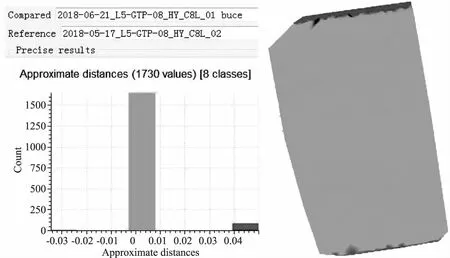
圖5 比較結果(橫坐標為m,縱坐標為點數)

圖6 比較結果(橫坐標為m,縱坐標為點數)
通過點云數據分析,綠色柱子為兩組數據分析結果,統計數據集中在±8mm以內,紅色數據由于該位置無重疊點云數據所致,整體內符合精度可以達到±8mm以內。
外符合精度主要指不同測站同一時刻測量相同目標時,兩站數據間的相互吻合度,保證同期觀測數據成果的正確性。在本次作業的過程中,采用L6GP07_HY_C4L_01測站及L6GP08_HY_C4L_01測站截取點云模型觀測數據,在兩站觀測數據中,截取同一位置的坡面的點云數據,分別進行坐標轉換、表面模型構建,進行精度分析。
選取的點云數據距離測站較近,根據誤差傳播規律,測點范圍約100m的條件下,點云數據外符合精度優于±10mm,由分析成果可知,各測站外部符合精度較佳,。
綜上所述,通過數據分析及評定:采用TM30/RTK實測基點,三維激光掃描儀所測100m范圍內的點云數據精度優于±10mm。
2.4 數據預處理
數據預處理主要包括測站數據配準拼接、點云濾波分類和大壩分析模型構建3個方面。
點云數據配,準根據測站定向法進行拼接,每個測站進行測站點坐標、定向方位角、溫度、氣壓等參數的輸入,軟件自動進行測站配準,將所有配準后數據進行融合處理。
點云濾波分類,將點云數據中除大壩以外的部分點云進行分類、提取,包括扁鋼、護欄、觀測墩、觀測房、建筑、花臺、過道、交通指示牌等。
大壩模型構建,將配準、分類完成的點云數據構建大壩mesh模型,劃定變形分析范圍,多期數據按照分析范圍進行處理。如圖7—8所示。
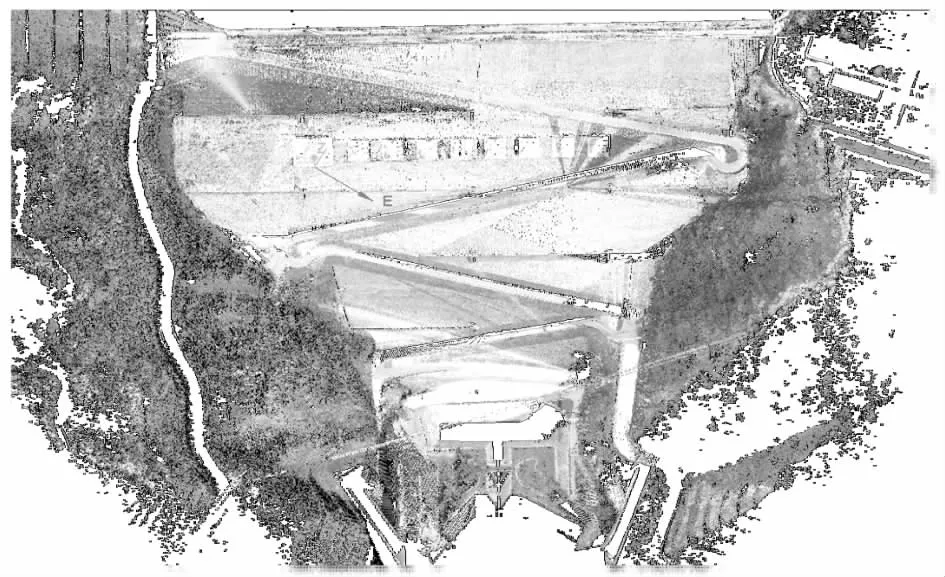
圖7 大壩三維掃描數據

圖8 三維分析模型構建
2.5 變形分析
本文采用Hausdorff距離法進行多期點云的變形分析,Hausdorff距離是描述兩組點云之間相似度的一種量度,是兩組點云之間差異的一種表達。假設有兩個點云集合A={a1,…,an},B={b1,…,bn},則這兩個點云集合之間的Hausdorff距離定義為:
H(A,B)=Maxa∈A{minb∈B{d(a,b)}}
(1)
式中,a、b—集合A與集合B中的點;d(a,b)—a與b之間的歐式距離(Euclidean距離)。
Hausdorff距離度量了兩組點云間的最大不匹配程度,距離越大,則表示匹配程度越差,反之,則表示匹配程度高。
使用開源的Cloud compare點云處理軟件進行多組點云的Hausdorff距離法變形分析,從整體上分析大壩變形趨勢。
3 工程實例
通過對糯扎渡電站2018年兩期數據和2016年兩期數據選取相同分析范圍內點云,將2016年1期數據作為大壩變形分析的首期數據,剩余的3期數據構建模型與其進行變形分析,使用Cloud compare點云處理軟件進行Hausdorff距離法疊加對比分析,得到分析成果,分別是2016年2期和2016年1期的數據比較結果圖、2018年1期和2016年1期的數據比較結果圖、2018年2期和2016年1期的數據比較結果圖,如圖9—12所示。圖中所有表格橫坐標單位為m,縱坐標單位為點個數。4期變形值數據見表1。

表1 4期大壩掃描數據變形值統計表

圖9 2016年2期—2016年1期大壩變形分析成果圖

圖10 2018年1期—2016年1期大壩變形分析成果圖

圖11 2018年2期—2016年1期大壩變形分析成果圖
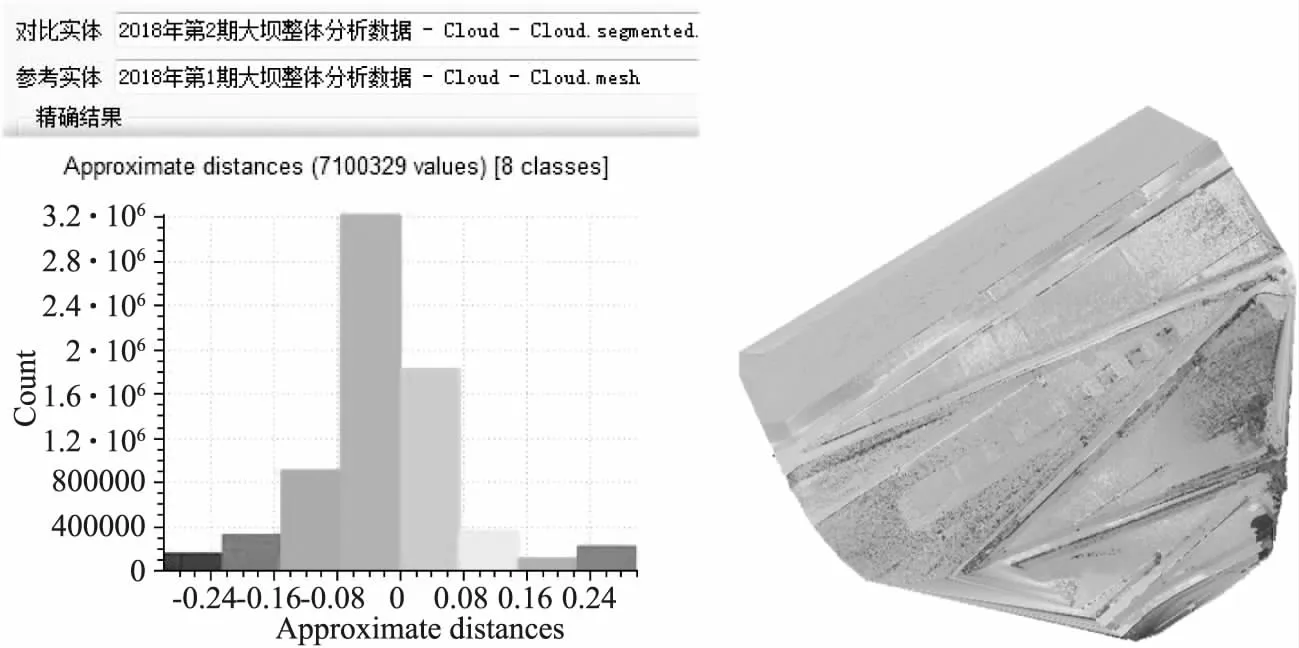
圖12 2018年2期—2018年1期大壩變形分析成果圖
從這4期數據整體分析成果來看,大壩中心軸線(壩頂路面)是趨于下沉的,從2016年2期、2018年1期和2018年2期的數據比較結果圖中可看出,比較差值從正到負變化,絕對值逐漸增大,變化量由最初的8cm以內,到10cm以內,到2018年2期觀測的時候,變化量最大的地方有16cm。
4 結語
本文結合糯扎渡三維掃描項目,定期對大壩進行掃描獲取了4期點云數據,利用Hausdorff距離法進行多期點云變形分析,運用色譜統計兩期之間的變形量,本文可以得到以下結論。
(1)三維激光掃描測站點位選擇合理,點位盡可能少,設站越多,數據配準誤差越大。
(2)采用了多種方法對點云數據精度進行驗證,保證了數據采集結果的精度及正確性,本次工作中,地面三維激光掃描整體數據精度≤10mm。
(3)三維激光掃描技術可以很好地應用在表面相對平整的土石壩進行變形分析,Hausdorff距離法可以很直觀地表現出大壩整體的變形位置及變形量,達到了對大壩整體的變形趨勢和規律進行監測。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
