基于大幅值Lyapunov軌道穩定流形的地月轉移方法*
2023-11-11 02:16:48鄭越,趙敏
航天控制 2023年5期
關鍵詞:方法
鄭 越,趙 敏
1. 西安航空學院,西安 710077 2. 西北工業大學航天學院,西安 710072
0 引言
地月轉移軌道設計是探月工程的關鍵問題。傳統地月轉移軌道的設計通常基于二體霍曼轉移[1]方法,具有燃料消耗大的缺點,不能滿足未來低成本航天任務需求。與之相比,基于限制性三體問題的地月轉移軌道充分利用了三體系統的動力學特性,有效降低了轉移過程中所需的能耗,這種軌道通常被稱為低能轉移軌道[2]。
在地月三體系統中,不變流形是與平動點密切相關的一種動力學結構,探測器運行在不變流形上能夠不耗能地實現空間轉移。位于月球正面的平動點L1點和位于月球背面的平動點L2點,由于周圍的力場環境,使得其不變流形為地月轉移提供了可行途徑[3]。根據平動點位置不同,地月轉移可分為基于L2點不變流形的外俘獲型低能轉移軌道和基于L1點不變流形的內俘獲型低能轉移軌道。根據不變流形的相流結構,內俘獲型低能轉移軌道可通過穿越軌道和漸近軌道來進行設計[2]。
弱穩定邊界(weak stability boundary, WSB)理論對應于外俘獲型低能轉移軌道,是1987年由Belbruno[4]首次提出的。WSB是相空間中太陽、地球和月球萬有引力趨于平衡的區域。這類軌道從地月系統外部進入系統內部再被月球捕獲,需要借助太陽的引力輔助[5]。Koon等[6]將地月三體系統L2點穩定流管與日地三體系統平動點的不穩定流管在適當的龐加萊截面內進行拼接,得到的位置及速度均連續的軌跡即為Belbruno所發現的WSB轉移。但是,探測器在外俘獲型低能轉移軌道中會因太陽引力而遠離地球和月球,所以需要較長的轉移時間。
內俘獲型低能轉移軌道始終處于地月系統內,可通過L1點周期軌道的不變流形來實現,這類軌道始終處于地月系統內,可減小探測器的飛行時間。當L1點周期軌道的幅值較小時,其不變流形能夠形成管狀結構,探測器可通過流管內部的穿越軌道,實現從地球區域到月球區域的空間轉移,但卻不能到達近地軌道和近月軌道[7]。現有方法通常增加兩段軌道,分別將L1點周期軌道流向地球區域的穩定流形與近地軌道拼接,將流向月球區域的不穩定流形與近月軌道拼接[8]。每段軌道的拼接,至少需要增加一次脈沖。目前通常將不變流形上相對于主天體的位置與速度相互垂直的點作為拼接點,再將霍曼轉移軌道與不變流形進行拼接[9]。除此之外,連一君[10]通過lambert軌道段連接不變流形;Alessi等[11]從穩定流形的近地點和遠地點中挑選拼接點來連接地球停泊軌道;徐明等[12]利用小推力實現了軌道拼接。
如果增大L1點周期軌道的幅值,不變流形可達到近地軌道和近月軌道,但卻不能形成流管,探測器只能沿著不變流形,作為周期軌道的漸近軌道來實現地月轉移。譚明虎等[13]利用與繞月軌道相切的大幅值Lyapunov軌道,將地月轉移問題轉化為地球停泊軌道到大幅值Lyapunov軌道的漸近轉移問題。盡管省去了額外的拼接軌道,但作為漸近軌道,穩定流形在接近Lyapunov軌道時都會在其附近飛行數圈且永遠不能到達這個軌道,必然會增加轉移時間和速度脈沖。
針對現有的基于不變流形的地月轉移軌道設計方法存在的轉移時間長、需要額外速度增量的缺點,本文設計了一種基于大幅值Lyapunov軌道穩定流形的地月低能轉移方法。該方法以與月球停泊軌道相切的Lyapunov軌道作為參考軌道,再根據穩定流形與Lyapunov軌道之間的偏差對其進行調整,最終通過一條穩定流形直接連接近地軌道與近月軌道進而實現地月轉移。本文所設計的轉移軌道在同樣僅需要2次速度增量的條件下,相比現有的基于大幅值Lyapunov軌道的地月轉移方法節省了軌道轉移時間;相比霍曼轉移節省了能耗,實現了地月低能轉移。
1 地月三體系統
1.1 動力學模型
考慮地月圓型限制性三體問題(circular restricted three-body problem,CRTBP),質量可以忽略的探測器在地球和月球兩個主天體的引力作用下的運動,其中主天體繞其公共質心做勻速圓周運動[14]。歸一化地球質量m1和月球質量m2之和為單位質量(m1/m2=0.0123),則:
(1)
(2)
其中:Ω為旋轉坐標系下的等效勢能:
(3)
設矢量r1和r2為探測器到兩個主天體的距離,有:
(4)
CRTBP系統中,存在雅可比積分如下:
(5)
在地月三體系統中,單位長度為地月之間的距離L=3.844×105km,單位時間為T=104 h,單位速度為V=1024 m/s。
1.2 大幅值Lyapunov軌道及其不變流形
在地月CRTBP下,平動點周期軌道中的任意一點都可以演化出4條不變流形[2]。對于位于地球和月球之間的平動點L1點,其Lyapunov軌道必然會存在1條流向地球方向的穩定流形。探測器在不變流形上運行時,可不耗能地實現空間轉移。當Lyapunov軌道的幅值越大時,系統的雅可比常數越小,而雅可比常數值決定了其不變流形的可達區域。當L1點Lyapunov軌道取較大的幅值使其與月球停泊軌道相切于x軸時,一方面,通過一個切向速度脈沖可以使探測器直接從Lyapunov軌道進入月球停泊軌道;另一方面,Lyapunov軌道流向地球方向的穩定流形可直接到達地球附近。
Xd=[0.983068,0,0,-2.35925]T
(6)
軌道的周期和雅可比常數分別為:
Td=7.27655,Cd=2.46791
(7)
如圖1所示,Lyapunov軌道與月球停泊軌道在Xd點相切,探測器在切點能夠通過脈沖減速從該Lyapunov軌道進入月球停泊軌道(本文軌道均采用無量綱坐標系)。所以,在探測器到達切點時,可以通過速度的減小,即增大系統雅可比常數來實現從Lyapunov軌道到月球停泊軌道的轉移。

圖1 大幅值Lyapunov軌道與月球停泊軌道相切減速示意圖
λ1=λ2=1,λ3=0.00208529,
λ4=4.79549×102
(8)
其中:特征值λ3對應的特征向量為:
ed=[-0.00261860,-0.00277165,
0.807490,0.589868]T
(9)
Lyapunov軌道穩定流形的計算方法是通過對軌道上的點X施加一個小偏差量來確定初始狀態,再反向時間積分來計算。穩定流初始點的計算公式為:
Xs(Xd)=Xd±εed
(10)
其中:ε為一個正的小偏差量,代表不變流形積分初值與Lyapunov軌道上點X的偏差。式(10)中的正號和負號代表穩定流形的正負兩個分支,分別流向地球方向和月球方向。當穩定流形能夠到達地球附近時,則可通過一個速度脈沖使探測器離開地球停泊軌道進入穩定流形。初始狀態為Xd的大幅值Lyapunov軌道穩定流形的正分支如圖2所示。盡管大幅值Lyapunov軌道的穩定流形不再具有管狀結構,但是與小幅值Lyapunov軌道的穩定流形相比,它們可以到達更加接近地球附近的區域,從而方便探測器從地球停泊軌道切向進入穩定流形。如果選擇距離地球表面167 km,即距離地心半徑為RE=0.0170265的近地軌道作為地球停泊軌道,那么這個大幅值Lyapunov軌道穩定流形的正分支可以直接到達地球附近。
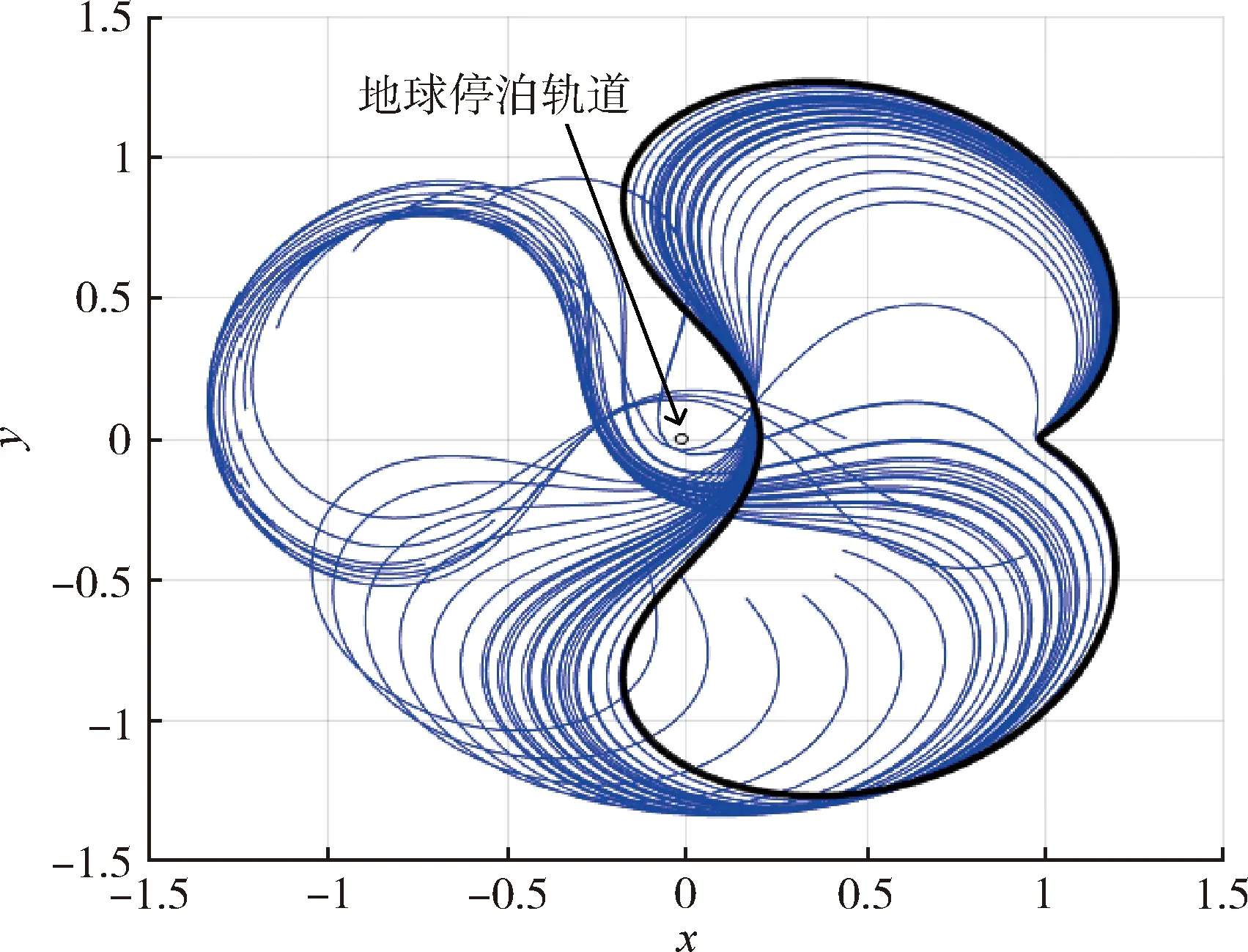
圖2 大幅值Lyapunov軌道的穩定流形
對于Lyapunov軌道的穩定流形,小偏差量ε的大小會影響穩定流形在軌道周圍運行的時間。圖3為以Xd+εed為初始狀態,通過不同偏差值反向時間積分20個單位時間的穩定流形的正分支。當ε=10-6時,穩定流形在Lyapunov軌道周圍運行大約3個周期;當ε=10-5和ε=10-4時,穩定流形在Lyapunov軌道周圍運行大約2個周期后流向地球;當ε=10-3、ε=10-2和ε=10-1時,穩定流形在Lyapunov軌道周圍運行大約1個周期后流向地球。由此可見:ε越大,穩定流形受到Lyapunov軌道吸引而在其周圍運行的時間越短。
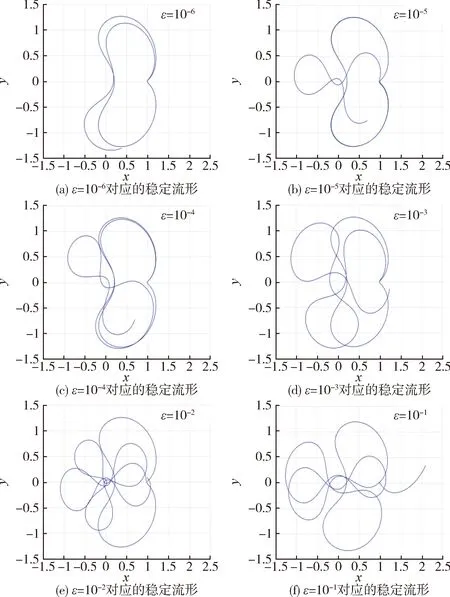
圖3 不同偏差值對應的穩定流形流向地球方向的分支
2 軌道設計方法
在地月CRTBP下,由于共線平動點L1點處于地球和月球之間,L1點的Lyapunov軌道必然會存在一條反向時間積分流向地球區域的穩定流形和一條正向時間積分流向月球區域的不穩定流形。不變流形可以用來實現地月轉移,探測器處于不變流形上可不耗能地靠近或者遠離Lyapunov軌道。但是,不變流形無論是靠近還是離開平動點周期軌道,都會在接近周期軌道時飛行數圈且永遠不能到達這個軌道。一方面,平動點周期軌道與不變流形之間漸近過程增加了軌道轉移所需要的時間;另一方面,現有方法通常忽略了周期軌道與不變流形之間的過渡,所設計出的轉移軌道并非一條完整連續的軌道,且未將過渡時所需的能耗考慮在內。
本文設計了一種基于L1點大幅值Lyapunov軌道的地月轉移方法。該方法通過一條流向地球方向的穩定流形直接連接近地軌道與近月軌道,軌道在地球和月球附近的終止條件通過最近點截面來實現。
2.1 最近點截面
在地月軌道轉移過程中,保證轉移過程中能耗盡可能低的條件是:探測器離開地球停泊軌道時通過一個切向脈沖使其速度增大,進入月球停泊軌道時再通過一個切向脈沖使其速度減小。軌道轉移的過程通常通過龐加萊截面實現,但是傳統的龐加萊截面(以x軸為截面)并不能保證探測器的切向加速或者減速,所以本節引入最近最遠點截面來設計地月低能轉移軌道。

(11)

(12)
表明相對于地球的位置向量垂直于速度向量,即
r·v=0
(13)
根據CRTBP動力學方程,如果軌道在t時刻滿足式(13)時,當滿足條件
(r·v)t-<0,(r·v)t=0,(r·v)t+>0
(14)
時,該點為近地點;當滿足條件
(r·v)t->0,(r·v)t=0,(r·v)t+<0
(15)
時,該點為遠地點。最近最遠點截面圖通常以探測器軌道在質心旋轉坐標系中的位置向量[x,y]作為投影點坐標,由此可以確定軌道相對于地心的位置向量[x+μ,y],而軌道的速度向量垂直于其相對于地心的位置向量。
最近點截面通常稱為近拱點龐加萊截面,可用來設計大幅值Lyapunov軌道的穩定流形與地球停泊軌道之間的拼接。當穩定流形在以地球為中心的近拱點龐加萊截面圖上的投影點剛好落在地球停泊軌道上時,則通過投影點位置可以施加切向脈沖。然而,需要注意的是:單從近拱點龐加萊截面圖上的投影點判斷,每一個投影點都可以代表兩個互相相反的方向。在圖4中,投影點a1對應的軌道與地球停泊軌道速度方向相同,則探測器離開圓軌道所需要的脈沖值最小,為v1-vE;投影點a2對應的軌道與地球停泊軌道速度方向相反,則探測器離開圓軌道所需要的脈沖值最大,為v2+vE。所以,當探測器在地球停泊軌道上運行時,對其施加一個脈沖,能夠使其離開該軌道。如果施加脈沖后系統的雅可比常數固定,那么脈沖值最小的充要條件是:所施加的脈沖為切向速度脈沖且與地球停泊軌道運行方向相同。
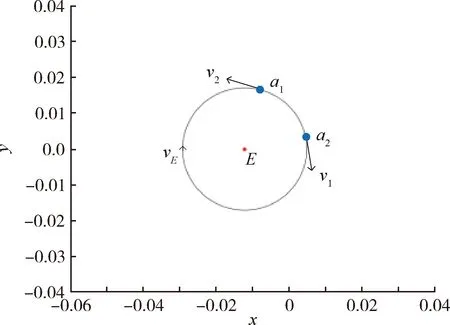
圖4 最近點截面圖的脈沖關系
2.2 地月轉移軌道設計
在地月軌道轉移根據本文1.2節的內容,可知初始狀態為Xd的L1點大幅值Lyapunov軌道與高度為100 km的月球停泊軌道相切,并且其穩定流形能夠到達地球附近。所以,利用初始狀態為Xd的L1點大幅值Lyapunov軌道能夠實現地月軌道轉移。然而,探測器在穩定流形上運動時永遠不能到達Lyapunov軌道。當偏差值設置較小時,穩定流形會圍繞Lyapunov軌道運行數圈,增加了轉移時間;當偏差值設置較大時,穩定流形能夠較快地離開Lyapunov軌道,但穩定流形初始點也會距離Lyapunov軌道較遠,為轉移軌道的設計增加了難度。圖5為以Xd為初始狀態的Lyapunov軌道取的情況下得到的流向地球方向的穩定流形。可以看出:Xd與穩定流形的初始點Xd+εed之間存在一定的偏差,距離大約為73 km。
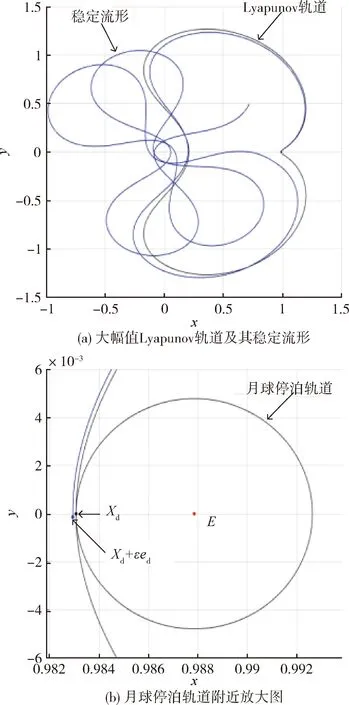
圖5 Lyapunov軌道與穩定流形之間的偏差

Xs=X0+εes
(16)
由于X0與Xd非常接近,則es與ed近似,所以有:
(17)
根據式(12),如果近拱點龐加萊截面以月心為中心,則有:

(18)
(19)
在預先設置取值范圍的情況下,由于es與ed較為接近,則可以預估Δx的取值范圍并進一步得到x0的取值范圍。在x0的取值范圍內,選擇x0并計算以x0為初始點的大幅值Lyapunov軌道,然后根據式(19)計算ε的值,可反向時間積分得到相應的穩定流形。
通過本文方法設計地月低能轉移軌道的流程如圖6所示。預先設置ε的取值范圍,預估Δx的取值范圍并進一步得到x0的取值范圍;選定x0的值并計算以x0為初始點的大幅值Lyapunov軌道,根據式(19)計算ε的值,得到相應的穩定流形;當穩定流形在以地心為中心的近拱點龐加萊截面圖上的投影點落在近地軌道上時,探測器能夠在該點實現從地球停泊軌道向穩定流形的切向過渡,否則重新設置x0的值;通過穩定流形在以月心為中心的近拱點龐加萊截面圖上的投影確定從穩定流形進入近月軌道的切點,計算這個近月軌道半徑得到月球停泊軌道,得到了一條完整的地月轉移軌道。

圖6 轉移軌道設計方法
3 數值仿真分析
在地月CRTBP中,選擇地球停泊軌道距離地球表面的距離為167 km,月球停泊軌道距離月球表面的距離為100 km,本文以Xd為初始值的大幅值Lyapunov軌道為參考軌道設計地月低能轉移軌道。
通過圖3可知:當ε取值為10-6,10-5和10-4時,穩定流形在Lyapunov軌道周圍運行至少2周,導致地月轉移時間過長;當ε取值為10-3和10-2時,穩定流形僅在Lyapunov軌道周圍運行1周,且隨著ε增大,穩定流形逐漸接近地球;當ε取值為10-1時,盡管穩定流形在Lyapunov軌道周圍運行1周,但距離地球較遠。因此,預先設置ε的取值范圍為[10-3,10-2],預估Δx∈[2.6×10-6,2.6×10-5],可確定x0的取值范圍。根據圖6中軌道設計流程,圖7為所得到的最短時間的地月轉移軌道,其對應的大幅值Lyapunov軌道的初始狀態為:

圖7 通過穩定流形得到的地月轉移軌道
X0=[0.983079,0,0,-2.36246]T
(20)
相應的穩定特征向量為:
es=[-0.00262780,-0.00274259,
0.804571,0.593845]T
(21)
與之對應的ε=0.00415310,通過X0和ε可以得到穩定流形的初始狀態并反向時間積分得到Lyapunov軌道流向地球方向的穩定流形。這個穩定流形在以地心為中心的近拱點龐加萊截面圖上的投影點落在距離地球表面距離為167 km的地球停泊軌道上。所以,這個點對應地球停泊軌道的分離點,使得探測器能夠從地球停泊軌道通過切向速度脈沖進入Lyapunov軌道流向地球方向的穩定流形。另外,需要找到穩定流形在以月心為中心的近拱點龐加萊截面圖上投影,而這個投影點可以定為月球停泊軌道的進入點。需要注意的是,通過投影點確定的月球停泊軌道會與理想軌道(距離月球表面100 km)存在一定的偏差,但這個偏差通常非常小。在圖7中,探測器最終進入的月球停泊軌道與月球表面的距離為100.018 km,與理想軌道僅存在0.018 km差距。探測器從雅可比常數為CE=58.3021的地球停泊軌道出發,通過一個切向脈沖Δv1=3131.6 km/s進入轉移軌道,轉移軌道的雅可比常數為C=2.46437,而探測器到達繞月軌道的雅可比常數為CM=5.50799,需要一個切向脈沖Δv2=789.1 km/s進入月球停泊軌道。整個地月轉移過程所需要的總能耗為Δv=3920.7 km/s,轉移軌道所需要的總時間為62 d。
表1為本文方法與現有方法所得到的地月轉移軌道的參數對比。傳統的霍曼轉移方法所需要的能耗為3994.8 km/s,飛行時間為5.1 d。與霍曼轉移方法相比,本文方法盡管需要更長的飛行時間,但卻能夠節約能量消耗。同樣基于大幅值Lyapunov軌道不變流形方法[13]的地月軌道轉移需要的總能耗為Δv=3890.2 km/s,飛行時間至少為95.8 d。與文獻[13]相比,本文方法減少了穩定流形漸近Lyapunov軌道時所需的飛行時間和脈沖次數。與現有的基于Lyapunov軌道的地月轉移方法不同,本文方法利用Lyapunov軌道流向地球方向的穩定流形直接將地球停泊軌道與月球停泊軌道連接進而實現地月轉移。優點是:在飛行時間方面,轉移軌道始終處于地月系統內,且不用通過漸近Lyapunov軌道來實現轉移,轉移時間較短;在能耗方面,轉移軌道為不耗能的穩定流形,探測器通過最近點截面實現地球停泊軌道的切向逃逸和月球停泊軌道的切向進入,盡可能地減少了轉移能耗;在所需脈沖方面,僅需要最少的2次脈沖即可實現地月轉移。
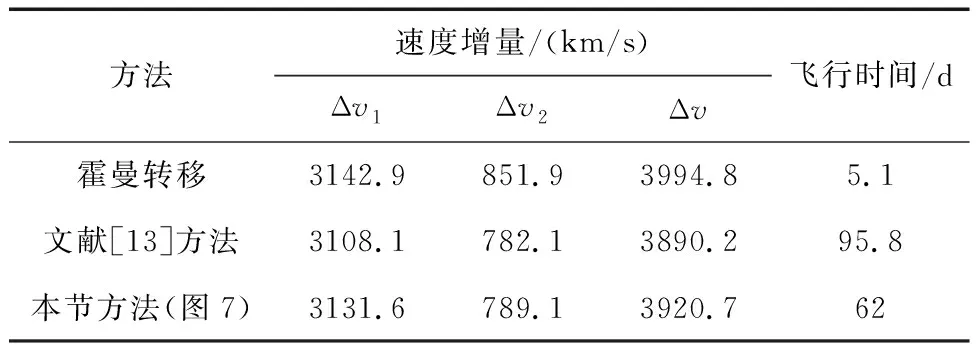
表1 地月轉移過程中所需的速度增量和飛行時間
4 結論
利用L1點大幅值Lyapunov軌道的穩定流形直接將近地軌道和近月軌道切向連接來實現地月低能轉移。相比霍曼轉移,該方法所得到的轉移軌道具有更少的能量消耗;相比其它基于Lyapunov軌道的地月轉移軌道設計方法,該方法省去了與不變流形的拼接和探測器漸近Lyapunov軌道的時間,節省了軌道轉移時間和脈沖次數。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
