科學手套箱靈巧臂遙科學任務規劃研究*
2023-11-11 02:09:42劉曉源王紫陽李俊麟
航天控制 2023年5期
李 正,劉曉源,王紫陽,張 驍,李俊麟
1.中國科學院沈陽自動化研究所機器人學國家重點實驗室,沈陽 110016 2.中國科學院機器人與智能制造創新研究院,沈陽 110169
0 引言
空間機器人是指在太空環境下進行空間作業的機器人[1],可在地面工作人員輔助下替代宇航員在空間作業中執行危險或長期的空間任務[2]。隨著空間任務的多樣性和復雜化,對空間機器人天地協同和實時操作的交互要求越來越高,其遙科學的作用和地位也越來越重要[3-4]。遙科學是一種人在回路的遙操作與遙現場相結合的操作方式,充分發揮了地面與空間機器人交互能力,有效地利用人的知識與經驗,最大限度地參與到機器人任務中[5-7]。但是天地交互會引起通信的時延,空間遙操作系統回路的時延通常可達幾秒甚至幾十分鐘[8],降低了空間機器人執行復雜任務的控制實時性和準確性。目前多采用延時預測控制律[8]、通信延時補償[9]、自適應任務空間同步控制[10-11]和虛擬現實預測仿真等[12-14]手段克服時延帶來的不利影響。
中國空間站[15]科學手套箱內放置有支撐生命科學精細操作的靈巧臂系統,某些科學實驗需要航天員輔助及與地面天地協同開展遙科學。在開展空間科學實驗前,需要對靈巧臂任務開展預仿真推演和操作驗證。本文探索了一種我國空間機器人的遙科學任務模式,以機器人語言遙編程和預仿真技術為手段,將靈巧臂任務分解為語言自動化控制動作的集合,由人規劃時間事件流,通過科學的組合實現任務,形成可執行后置代碼,上載到空間應用系統,再由航天員輔助和天地遙科學方式實現天地協同。在實際工程應用中避免了天地傳輸實時控制指令帶來的時延問題,可實現靈巧臂在軌的自主性和任務自動化,提高科學實驗任務執行的效率,滿足靈巧臂工程任務可靠性與便捷性的遙科學要求。
1 遙科學交互原理
遙科學用于從遠距離實施空間科學研究工作。主要由地面、空間和通信網絡3部分構成。“地面”是由人、遙操作平臺及預仿真驗證平臺組成,可以開展遙操作和遙現場。由人作為主體對空間機器人進行任務規劃、過程驗證和任務執行觀察。其中遙操作可以由人機界面進行控制,也可以由力反饋控制器手柄[16-17]等裝置進行控制,遙現場可采用虛擬現實技術遙現空間真實的現場。“空間”由空間應用信息系統及空間機器人系統組成,可接收來自地面的控制指令及任務,按指令要求完成任務。“通信網絡”是天地通信的鏈路,它的帶寬和時延對遙科學系統的控制效果有絕對性作用。遙科學交互原理見圖1。
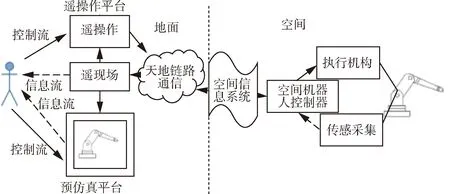
圖1 遙科學交互原理
2 靈巧臂系統設計
2.1 靈巧臂結構
科學手套箱位于手套箱與低溫存儲柜中,是一個集成溫、濕、光和風控制于一體的可操作潔凈容器,里面放置用于開展生命科學實驗的視頻監控、顯微操作系統和靈巧臂系統,如圖2所示,靈巧臂系統如圖3所示。
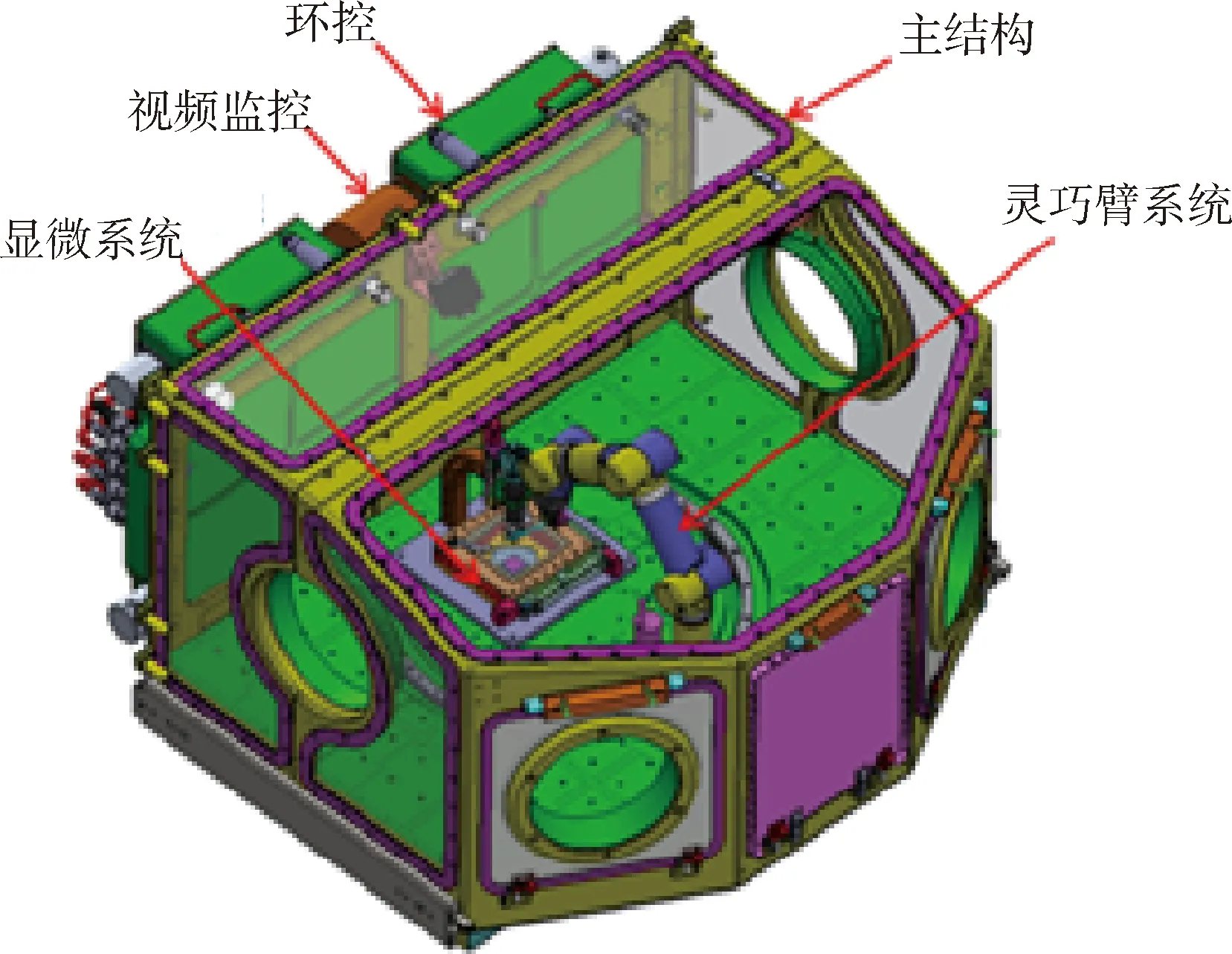
圖2 科學手套箱

圖3 靈巧臂系統
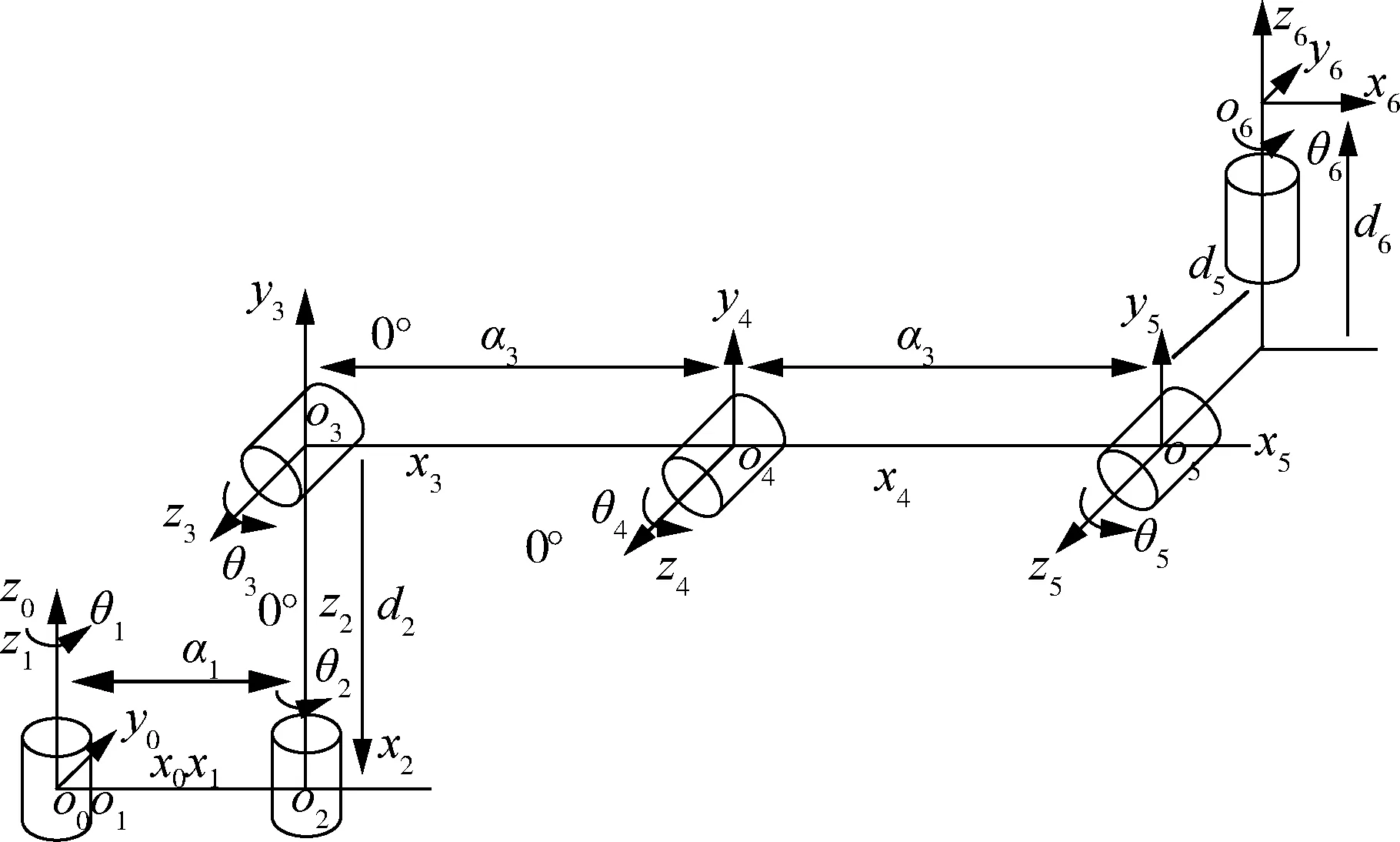
圖4 靈巧臂坐標系統
2.2 靈巧臂建模
靈巧臂為六自由度機器人,其構型坐標系建立如下:
其DH參數表為:
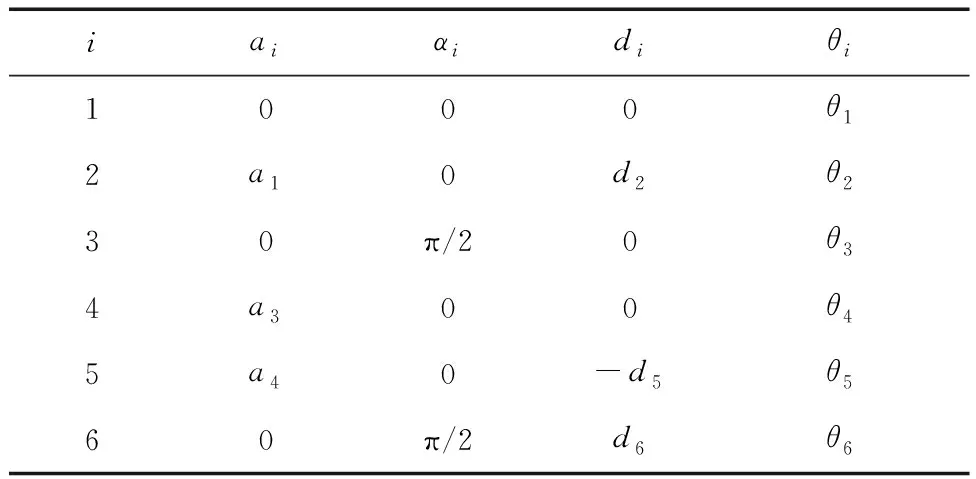
表1 靈巧臂DH參數
則根據連桿變換通式
機器人的運動控制方程為:
2.3 靈巧臂編程語言
作者采用Visual Basic(VB)腳本[18]語言設計的機器人語言結合靈巧臂運動控制方程能方便地完成靈巧臂的編程任務,作為機器人編程語言,融合了靈巧臂運動控制指令,通過語言編程的方式在靈巧臂關節空間和笛卡爾空間完成人和靈巧臂之間的控制交互。靈巧臂運動控制編程語言指令見表2。通過指令設置θ1~θ6的關節值或末端位姿值,即可實現對靈巧臂的各種運動控制。
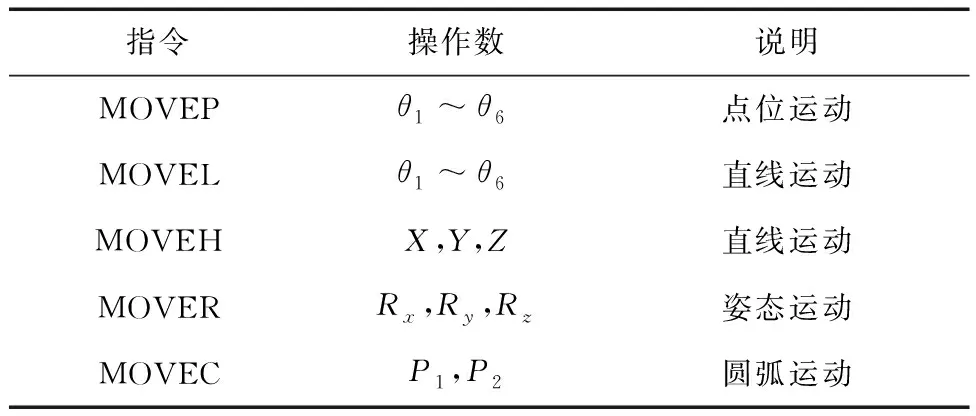
表2 靈巧臂運動控制指令
2.4 靈巧臂遙科學系統設計
結合我國空間站對手套箱中靈巧臂系統進行遙科學設計,采用三維仿真人機界面對靈巧臂工作環境進行遙現,實現地面鏡像監控。當正常開展實驗時,人盡量少介入,充分發揮機器人語言控制的自主性。而當非正常或非理想情形出現時,則應充分運用遙操作的交互能力,讓人最大限度地進行干預,見圖5。
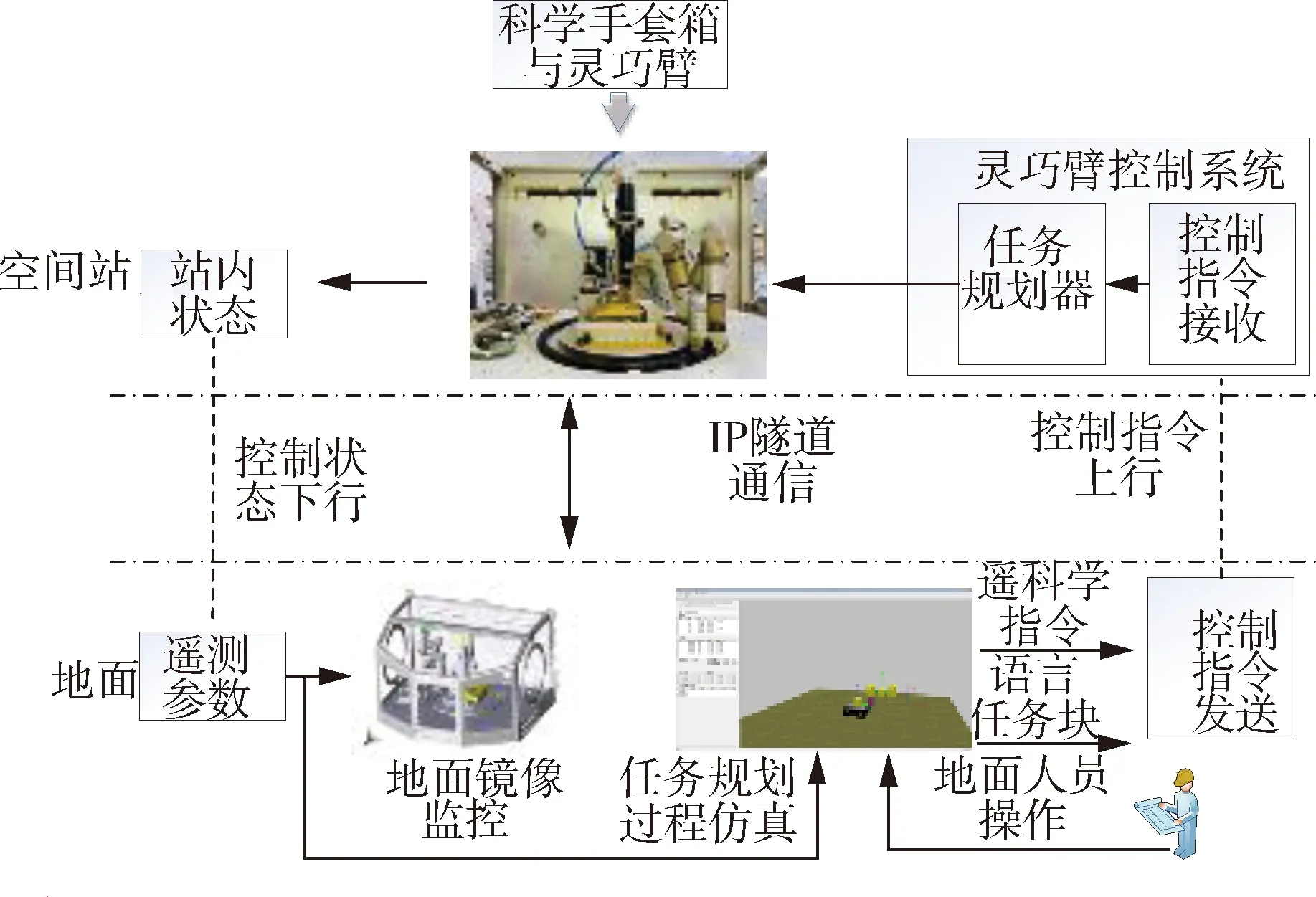
圖5 靈巧臂遙科學設計
采用VB腳本計算機語言可以編程出復雜的機器人任務。地面操作人員編寫靈巧臂任務代碼,規劃任務,然后在地面預仿真環境中進行過程仿真,經過推演驗證,可以將生成的后置代碼上行到靈巧臂控制器中,再由靈巧臂在軌執行。這樣,靈巧臂在執行任務時直接依賴于本地控制指令,避免了天地大量實時控制指令傳輸的過程。通過提供開放性的語言平臺和編程接口,地面操作人員可以針對靈巧臂任務需求自由地進行離線編程。
3 靈巧臂遙科學任務規劃
3.1 地面鏡像
地面鏡像設計有兩種方式,一是遙現場三維仿真,根據先知空間站手套箱環境建立仿真場景,通過IP隧道下行遙測數據,并將實際的遙測數據用于仿真動畫驅動,在地面上顯示出靈巧臂在空間的實際工作狀態,為地面操作人員提供反饋參考。二是遙現場視頻監控,通過在軌監視相機,將靈巧臂工作場景畫面以視頻實時下傳,作為遙現場的實際狀態監控畫面,有利于實際的感知。在靈巧臂工作過程中,地面人員依據鏡像監控可實時對靈巧臂的工作情況作出人為判斷,并作出控制決策。
3.2 任務規劃過程仿真
3.2.1 遙編程交互
設計靈巧臂系統的控制指令為立即指令Pi和延時指令Ci兩種類型,指令數據區中含有子指令、要執行任務的ID、時間碼等信息。立即指令發出后可被靈巧臂控制器直接執行,延時指令為帶有時間戳的指令,需等待到指定的時間方能執行,則靈巧臂控制指令集合為{Pi}∪{Ci}。由靈巧臂運動控制指令集和VB腳本語言組成的靈巧臂編程任務可生成靈巧臂任務塊為Ti。控制指令中的任務ID為Ti的索引序號,將指令與要執行的任務關聯起來。任務塊以文件形式保存,形成靈巧臂任務池{Ti}。以VB腳本語言遙編程的方式可快速對靈巧臂任務進行開發和描述,控制指令通過事件表可以對Ti進行復用和重組,實現靈巧臂任務快速開發和組合實現。
3.2.2 任務預仿真驗證
按照靈巧臂系統先知環境構建機器人三維仿真環境,結合計算機圖形學技術和機器人遙編程技術,對于空間任務復雜的運動進行描述和編程,并進行高精度的仿真,實現復雜運動軌跡和運動參數的優化。通過遙編程交互,進一步對靈巧臂執行指令過程的三維可視化動畫和軌跡進行顯示,從而先知推演驗證任務的完成情況。經過確認后,生成的任務塊Ti可由地面人員通過天地通信鏈路快速傳輸到靈巧臂控制系統存儲,等待任務規劃器調用和執行,由于文件的特殊性,Ti可以被任務復用,為某些重復的任務流程和使用帶來便利。
3.3 IP隧道通信
我國航天系統除常規數據鏈路通信外,已經建設成具有獨自特色的空間網絡通信系統。IP隧道通信帶寬下行達到1Gbps以上,可滿足科學應用數據的下行和數據注入上行要求,保證遙現場的實時性。所以將靈巧臂工作環境的視頻圖像數據和工程數據實時下行到地面鏡像監控系統,由地面人員實時觀測靈巧臂執行任務時的狀態。同時,地面操作人員將規劃的機器人可執行任務塊和控制指令直接上行到在軌靈巧臂控制器,就實現了天地之間的數據遙交互通信。
3.4 任務規劃器
3.4.1 時間流事件的自主控制
任務規劃器執行時間流事件示意見圖6。任務規劃器接收到延時指令Ci后,將其存儲在任務規劃器的延時事件表中。事件表是一個帶時間流的事件隊列,是地面人員拆分靈巧臂的任務流程形成的指令流。執行完的事件被清空,事件表可被重復規劃使用。通過延時任務管理器,當掃描到時間符合事件執行時,將該延時指令Ci取出并執行。Ci中有要執行的任務ID,根據ID去任務池中查找任務塊Ti,將Ti加載到靈巧臂控制器執行,實現靈巧臂在本地自主執行任務的目的。對于空間站在非測控區時,該方式還可以有效控制靈巧臂完成一定的自主任務。為了實現安全性,靈巧臂設計了關節過流和干涉故障保護的安全性措施。
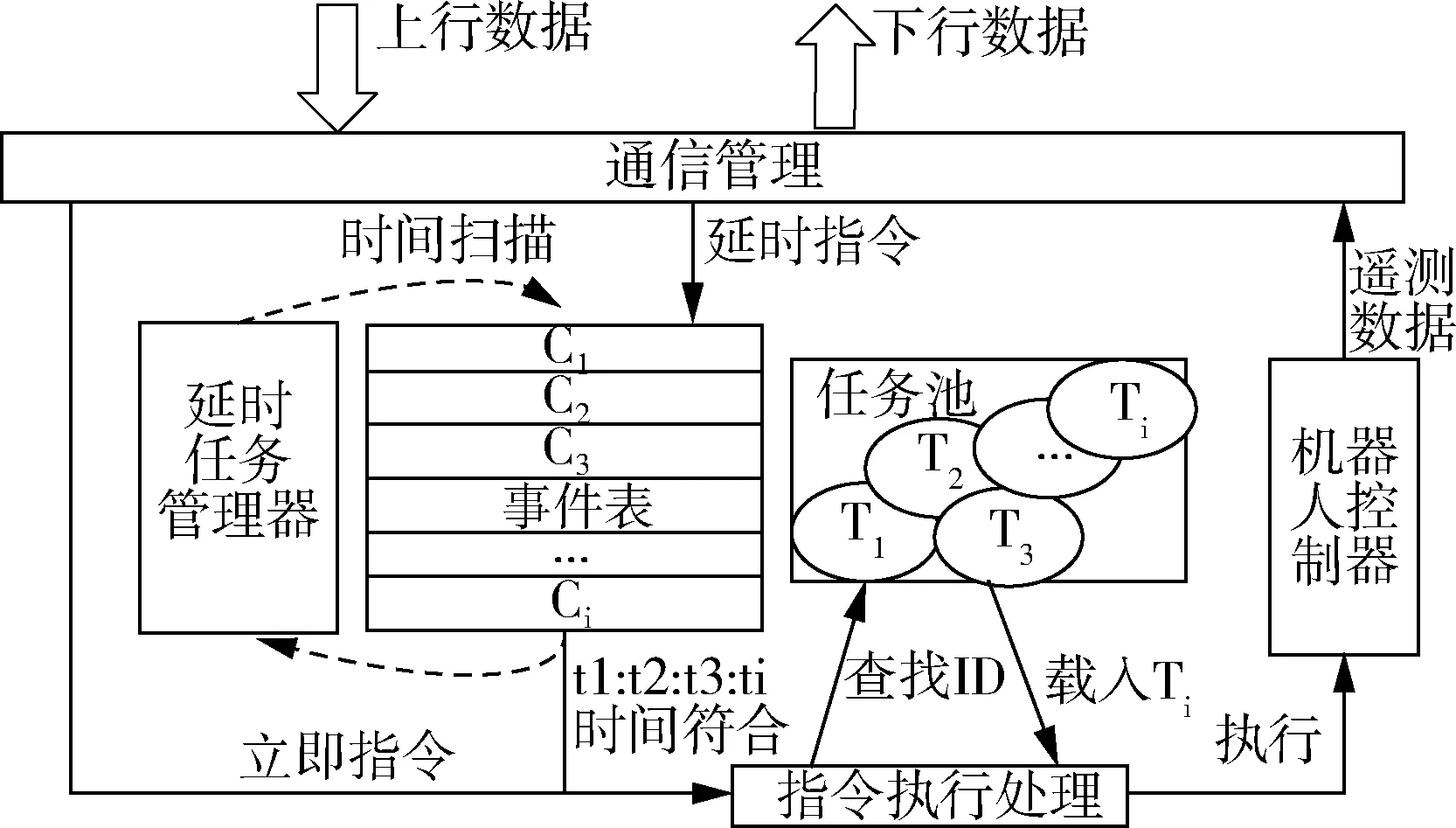
圖6 任務規劃器指令處理
3.4.2 測控區的天地遙操作
當空間站處于測控區開展天地遙操作時,可直接采用立即指令Pi對靈巧臂進行遙控任務操作。為了某些科學實驗的精細運動控制,地面人員可采用步進式的增量控制方式,在Pi中設定每一次運動的步長,通過地面鏡像監控確認Pi運動控制每一次都完成,不會因天地通信回路時延或反饋造成控制超量。雖然該方法效率低,但可保證實驗操作的精細控制和實驗步驟的正確性。同時,也可以結合任務池中Ti任務,由立即指令Pi執行Ti進行部分自主控制,實現機器人遙操作和自主任務的耦合交互,同樣可以避免天地通信時延問題。
4 靈巧臂任務仿真實驗
采用設計的任務規劃與預仿真平臺擬開展空間任務對某棉片進行消殺,如圖7。
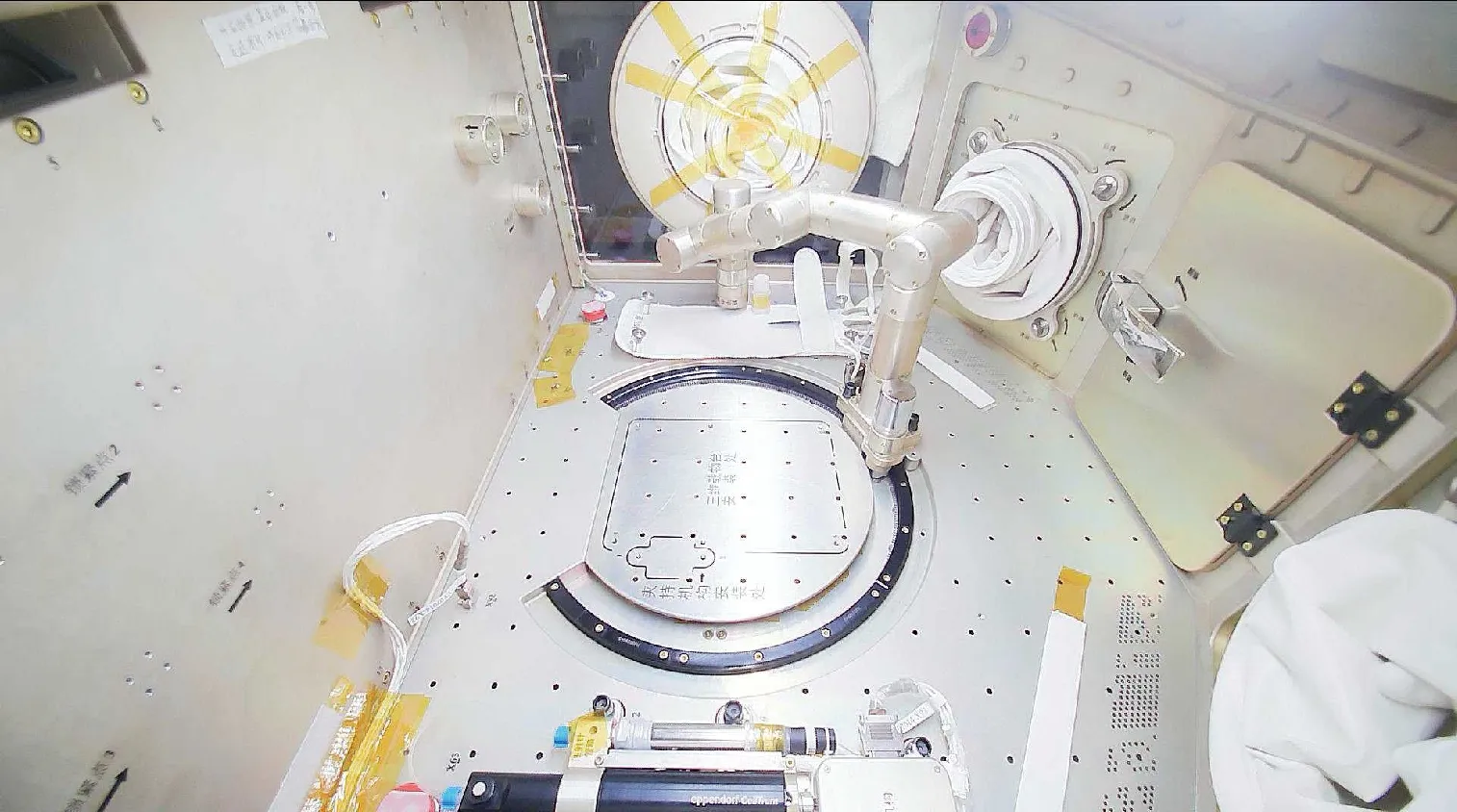
圖7 擬執行目標任務
任務目標為100 mm×200 mm的矩形對象,開展遙編程仿真推演任務過程如圖8。
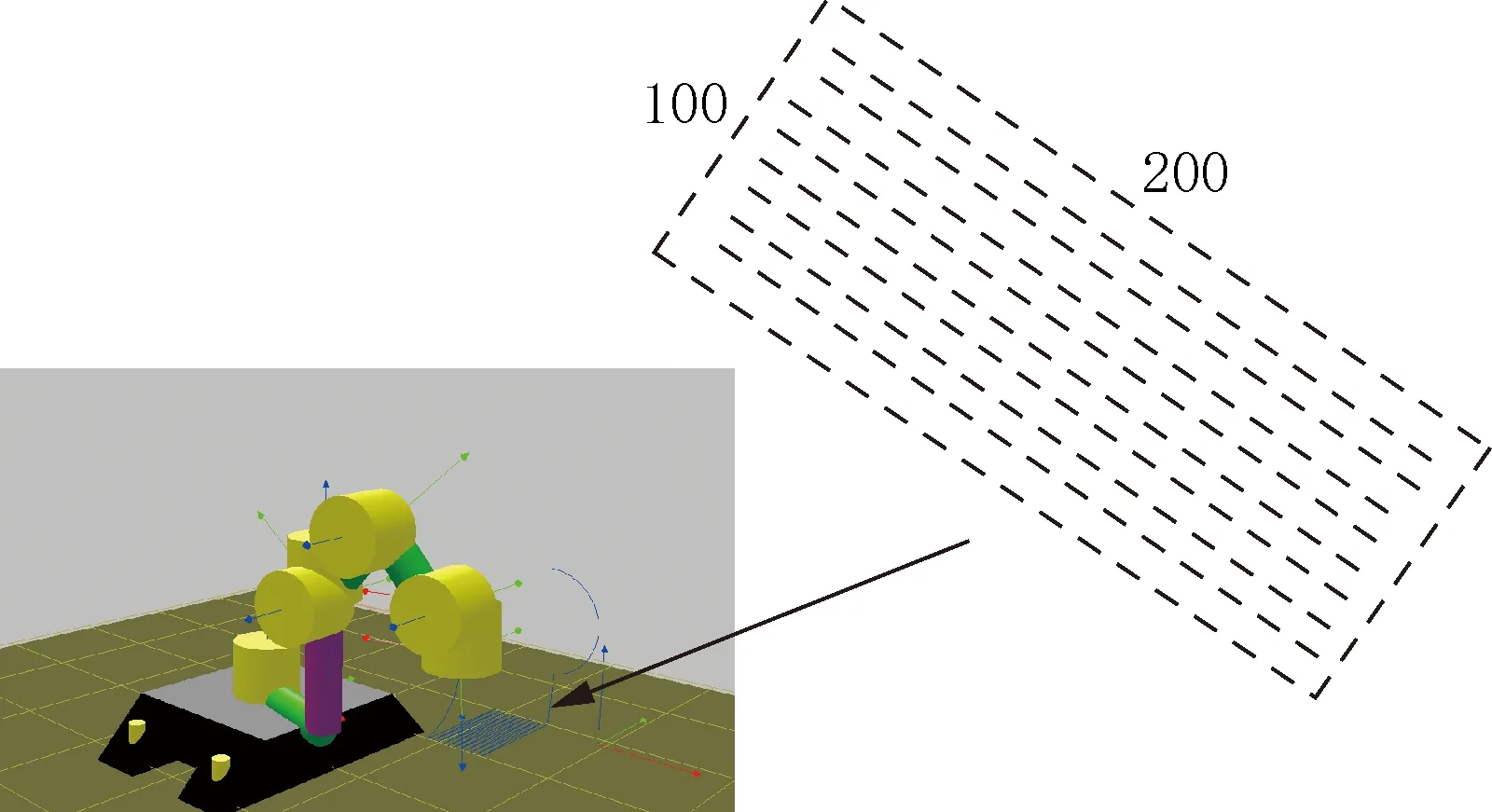
圖8 機器人遙編程控制
通過仿真平臺界面可推演該矩形面消殺運動軌跡任務,驅動仿真機器人運動,仿真機器人將自主按機器人語言指令完成任務規劃和過程仿真,并得到任務塊T。通過預仿真平臺仿真推演,可預驗證任務的正確性,得到驗證的任務后置代碼將用于在軌任務執行。
5 結論
依托我國空間站中科學實驗柜科學手套箱靈巧臂系統,設計了一種符合我國航天應用信息系統的空間機器人遙科學模式:
1)將在軌靈巧臂系統實際狀態在地面鏡像,以VB機器人語言遙編程方式規劃和描述靈巧臂任務,開展任務預仿真推演和驗證,形成可執行任務塊;
2)采用復用延時事件表任務規劃和時間流事件驅動機制在軌自主執行靈巧臂任務塊;
3)實現了靈巧臂可復用任務池的自主任務和遙操作相結合的交互工作方式,繞開了通信時延對空間機器人實時控制過程中的不確定影響,提高了遙科學任務的適應性、穩定性和自主性。
目前,通過在地面測試及在軌實驗,系統能滿足在軌科學實驗任務要求。而采用虛擬現實增強遙現場的臨場感,研制友好的人機遙操作界面、仿真界面,以及提高機器人在軌自主安全性控制將是后續要繼續深入研究的內容。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
小小藝術家(2019年6期)2019-06-24 17:39:44
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
今古傳奇·故事版(2016年15期)2016-09-07 06:57:32
中國工程咨詢(2016年4期)2016-02-14 07:28:28
小雪花·成長指南(2015年3期)2015-05-04 00:04:37
