雙擺橋式起重機抗擾防擺跟蹤控制
2023-11-14 06:02:32吳易鳴楊欽朝尹健宇
振動與沖擊 2023年21期
吳易鳴,孫 寧,楊欽朝,尹健宇
(1.東北大學 信息科學與工程學院,沈陽 110819;2.南開大學 人工智能學院 機器人與信息自動化研究所,天津 300350;3.南開大學深圳研究院 智能技術與機器人系統研究院,廣東 深圳 518083)
起重機作為搬運、倉儲、物流等各行業中都極為重要的重型裝備之一,被廣泛應用于工礦車間、倉庫車站、集裝箱碼頭、海洋開發等場合[1-3]。起重機具有欠驅動特性。此類具有欠驅動特性的系統在許多場合下可以節省驅動成本、精簡機械結構、減小能源消耗。例如,機械臂[4]、飛行器[5]、移動機器人[6]、水下機器人[7-8]等。然而,由于缺失了控制輸入,欠驅動系統相比于全驅動系統[9]在理論上更加難于分析。此外,對于起重機而言,另一個常見的特性為雙擺效應。即貨物與吊鉤發生兩級擺動。這種情況不僅更容易激發較大的貨物擺幅,也更難于實現精準定位。
起重機系統的典型實現方法包括:輸入整形與軌跡規劃等開環控制方法[10],比例微分(proportional differential,PD)控制、先行二次規劃(linear quadratic regulator,LQR)、滑模控制、魯棒控制等閉環控制方法[11-15],其中,開環控制方法往往應用便捷,但較依賴于離線計算,對參數敏感。閉環控制方法提高了魯棒性能但參數往往較多,實際效果受調參影響。
在理想條件下,較多研究將起重機吊運負載處理為單擺模型[16-23]。而在實際應用中,起重機系統往往通過繩索與吊鉤的形式運輸負載,使雙擺效應較為常見。在這種情況下,起重機系統的控制輸入數目不變,但欠驅動自由度增加,若將其簡化為單擺結構并直接應用未考慮雙擺效應的防擺方法將難以達到預期的防擺效果。截至目前,受到單擺起重機控制技術的啟發,已有研究對典型的開環與閉環控制方法進行了改進。首先,是開環的指令整形技術[24-25]與軌跡規劃技術[26-27]。然而,起重機往往應用于復雜工況,易受到外部擾動的影響。在這種情況下,Wu等[28]利用滑模控制技術實現了分布式負載的防擺吊運。石懷濤等[29]引入擺角耦合項實現了兩級擺動的加速抑制。Qian等[30]則利用了模糊控制技術實現了防擺吊運。
在實際應用中,可結合開環軌跡規劃與閉環軌跡跟蹤控制實現負載吊運。然而,開環方法大多著眼于軌跡的離線規劃環節;閉環控制方法大多為定位控制,跟蹤控制較少。為進一步提升雙擺起重機系統在軌跡跟蹤環節的抗擾性能,提出了一種抗擾防擺跟蹤控制方法。該方法的貢獻歸納如下:① 引入集總干擾項,并結合狀態觀測器設計更新律在線估計擾動,從而使系統能夠處理未建模動態、外部擾動等未知不確定性;② 設計虛擬控制器,使系統能夠實現對既定軌跡的魯棒跟蹤,且通過嚴格的理論分析證明了跟蹤誤差的有界性;③ 在更新律中引入一個可調節的更新因子,并從理論上證明了更新因子增大跟蹤誤差減小,實現對跟蹤誤差的約束。從問題解決方面來看,該方法能夠提高系統對建模誤差、未建模動態、不確定性等因素的魯棒性,同時可在理論上約束跟蹤誤差實現良好的軌跡跟蹤。從理論創新方面來看,該方法受到L1自適應控制的啟發,在此框架下進一步探索了如何處理具有較多欠驅動自由度的系統的抗擾控制問題。
1 問題描述與模型變換
首先,給出雙擺橋式起重機系統的動力學方程如下
(1)
(mh+mc)gl1sinθ1=0
(2)
(3)
其中,各變量與已知參數的定義如表1所示。本文的控制目標是臺車位移跟蹤給定軌跡xf(t),并最終穩定在期望的目標值xd。同時,在跟蹤控制的過程中實現兩級擺動的有效抑制。
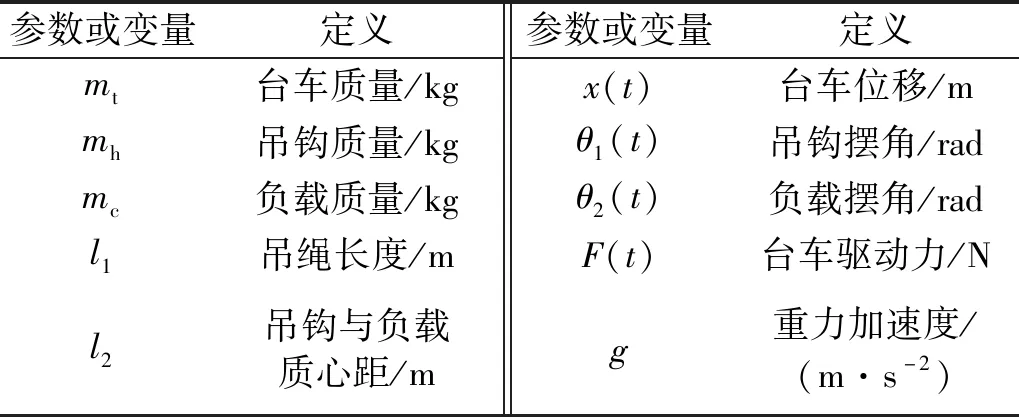
表1 系統參數與變量定義

(4)
(5)
(6)

(7)
同時,用式(6)減去式(5),可得
(8)
基于式(7)、式(8)與χ(t)的定義,可知原始狀態變量x(t),θ1(t),θ2(t)均可以用新的狀態變量χ(t)來表示。于是,可將式(4)改寫為如下形式

(9)
式中:參數a=mtmhl1l2[(mh+mc)g2];參數b=[mt(l1+l2)+mhl2]g;參數γ=mt+mh+mc;為未知的建模誤差。后續的控制律設計與穩定性分析將基于變換后的模型式(9)。等效地,基于新的狀態變量與動力學模型式(9),控制目標變為使χ(t)跟蹤軌跡xd(t)。
2 控制設計及穩定性分析
為實現控制目標。接下來將對控制輸入F(t)進行設計。給出控制系統的整體流程框圖如圖1所示。

圖1 控制系統流程框圖
首先,定義如下誤差變量eχ(t)∈R及其導數
(10)
式中,i=1,2,3,…,6。結合后續的分析,最終的控制輸入的形式設計如下
(11)
(12)
其中,Aχ∈R4×4,Bχ,Cχ∈R2分別定義如下
(13)

(14)

(15)

基于所設計的控制器與更新律,為方便后續分析,給出閉環系統方程如下
(16)
并根據實際應用情況給出如下假設:

接下來,將通過分析論證如下的定理,以證明閉環系統的穩定性。
定理1對于雙擺橋式起重機系統式(9)與式(12),所設計的控制器與參數更新律式(11)、式(14)與式(15)能夠使如下結論成立。
(1) 當未知擾動是時變量時,所有的系統狀態有界,并滿足
(17)
(18)
(19)
式中,存在h∈R2×2,使hT(Is-A)-1Bχ=N1(s)/N2(s),deg(N1)-deg(N2)=1成立。
證明對定理1展開證明需對如下兩種情況進行討論與分析:
情況1考慮未知擾動時變的情況。首先,構造如下標量函數V(t)
(20)
并求導,可得

(21)
(22)
V≤σmΓ-1?V∈L∞
(23)
并可通過式(13)、式(14)與式(23)推知
(24)
即可得跟蹤誤差有界。
為進一步證明定理1,可將式(21)與式(23)中的結論進行整理,并得到
(25)

(26)
接著,若將式(12)與式(13)相減,可得到
(27)
則式(26)中的不等式變為
(28)
即式(18)成立。此外,利用式(27),還可從式(14)與式(16)得知

(29)
即式(19)成立,情況1得證。值得注意的是,在式(17)~式(19)中,隨著參數Γ的增大,跟蹤誤差減小,而當Γ趨于無窮大時,跟蹤誤差趨于0。表明在應用時,可通過增大Γ的值來減小跟蹤誤差,使其滿足需求。

即情況2得證。
因此,綜合結論式(25)、式(28)、式(29)與式(30),定理1證畢。
3 仿真與試驗結果分析
本章將對所提方法進行仿真與試驗驗證。仿真模型使用原始模型式(1)~式(3)。試驗時應用圖2所示的橋式起重機系統樣機[35]。在此給出所提控制律與更新律參數的調節規律。kp,kd類似PD控制中的P增益與D增益;Kχ為濾波相關的參數;更新因子Γ越大,跟蹤誤差的界越小。
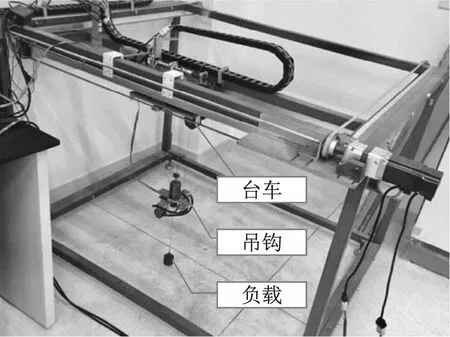
圖2 雙擺橋式起重機硬件試驗平臺
3.1 仿真驗證

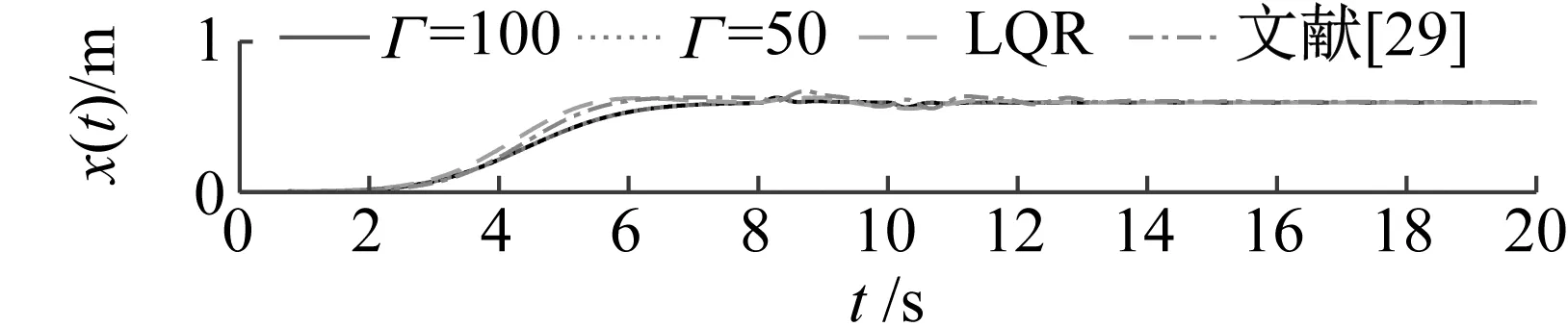
仿真時選取了兩種對比方法,分別為:經典的LQR方法與石懷濤研究中的方法。LQR控制器的控制增益為k1=60,k2=49.33,k3=-128.72,k4=-7.49,k5=20.4,k6=-6.84。石懷濤研究中控制器的控制增益為kp=5,kd=20。同時,在仿真中加入外部擾動,對比各方法的跟蹤與防擺效果。仿真結果如圖3所示,其中,為驗證理論結果,在仿真時給更新因子Γ賦不同的值。從圖3中可以看出:① 所提方法引入集總干擾項,能夠在線補償未知不確定性,較快速地消除了擾動的影響;② 所提方法可良好跟蹤時變軌跡,并可使吊鉤與負載額的擺幅在2 deg以內;③ 根據仿真數據,當分別取Γ=100,Γ=50時,位移的跟蹤誤差分別穩定在0.003 m與0.007 m,即驗證了Γ越大跟蹤誤差越小的理論結果。綜上,仿真結果驗證了所提方法的有效性。
(a)
3.2 試驗驗證
試驗1跟蹤S型軌跡。令軌跡參數為xd=0.5 m,λ1=1.1,λ2=0.1,γ=3.5,增益為kp=167,kd=9,Kχ=10,并取Γ=5。試驗結果圖4所示。可以看出,所提方法能夠實現對給定軌跡的良好跟蹤,且在跟蹤過程中有效地抑制吊鉤與負載的兩級擺動。

(a)
試驗2施加外部擾動。本組試驗為驗證所提方法針對外部擾動的魯棒性,其試驗結果如圖5所示。在5~15 s加入擾動,可以看出在加入了外部擾動的情況下,所提方法依然能夠很好地跟蹤期望軌跡,有效地抑制人為施加在欠驅動擺角上的干擾。

(a)
4 結 論
針對存在未知不確定性與未建模動態的情況,基于L1自適應控制技術提出了一種雙擺橋式起重機系統抗擾防擺跟蹤控制方法,實現了對S型軌跡的魯棒跟蹤。具體而言,首先分析模型,引入集總干擾項處理未建模動態。之后,引入虛擬控制量并設計狀態觀測器、濾波環節以及未知擾動更新律。經過嚴格的理論分析證明了跟蹤誤差均有界,且更新因子越大跟蹤誤差越小。試驗結果表明所提方法具有良好的跟蹤性能,且能夠快速消除負載擺動。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
