基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷
2023-11-14 06:02:24崔桂艷鐘倩文鄭樹彬彭樂樂丁亞琦
振動與沖擊 2023年21期
崔桂艷,鐘倩文,鄭樹彬,彭樂樂,文 靜,丁亞琦
(1.上海工程技術大學 城市軌道交通學院,上海 201600;2.上海地鐵維護保障有限公司車輛分公司,上海 200031)
滾動軸承作為旋轉機械設備中的主要組件,其是否失效直接影響機械設備運行狀態和健康狀況。滾動軸承故障診斷常采用振動分析法,而采集到的振動信號包含背景噪聲,且振動信號具有非平穩、非線性特征,如何從振動信號中提取有效特征是進行故障診斷的關鍵[1-2]。隨著故障診斷理論研究的深入,學者們提出了各種軸承故障診斷方法,例如:經驗模態分解(empirical mode decomposition,EMD)[3]、BP(back propagation)神經網絡[4]、PNN(probabilistic neural network)[5]、小波分析[6-7]和奇異值分解[8]等。隨著人工智能技術的不斷發展,支持向量機SVM[9],卷積神經網絡(convolutional neural network,CNN)[10]的使用實現了軸承故障的自動識別。
利用EMD[11]處理軸承振動信號可以降低噪聲和提取故障特征,但其存在端點效應及模態混疊等問題。針對該問題,Dragomiretskiy等[12]提出了一種非平穩信號處理方法:變分模態分解(variational mode decomposition,VMD),克服了EMD方法存在的端點效應和模態分量混疊的問題,對采樣和噪聲具有較好的魯棒性,可以降低復雜度高和非線性強的時間序列非平穩性,分解獲得包含多個不同頻率尺度且相對平穩的子序列,廣泛應用于旋轉機械的故障診斷和識別。文獻[13-14]提出優化的VMD方法,分別利用遺傳算法和包絡峰度的最大值確定VMD的模態分量個數;文獻[15]提出一種基于變分模態分解與支持向量機相結合的滾動軸承故障診斷方法,在少量樣本情況下能有效地對軸承的工作狀態和故障類型進行分類。
近年來,深度學習在故障診斷領域得到了一定的應用[16],CNN[17-18]作為其中的主要方法之一,廣泛應用于圖像識別領域,并取得了優異效果。它利用卷積層、池化層、激活函數等基本模塊就可以實現對圖像端到端的學習,避免了傳統方法的手工提取特征。文獻[19]提出多尺度卷積神經網絡,開發一種“端到端”的故障診斷系統,該模型在復雜環境下性能更佳。
近20年來,多源信息融合故障診斷作為一種智能、高效的故障診斷方法,在故障診斷領域的應用越來越廣泛[20]。針對單傳感器反映的信息不全面問題,利用多傳感器信息融合為故障診斷提供更多的信息。文獻[21]提出基于深度置信網絡與信息融合的齒輪故障診斷方法,與單傳感器故障診斷相比具有更高的故障識別精度。文獻[22]提出基于信息融合的機器人薄壁軸承故障智能診斷方法,比單傳感器診斷準確率高。
針對上述方法,本文提出一種基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法,解決變工況下滾動軸承故障診斷過程中泛化能力受限及單一傳感器反映信息不全面的問題,實現變工況下滾動軸承故障類別和損傷程度的精確診斷。
1 變分模態分解與卷積神經網絡
1.1 變分模態分解
1.1.1 VMD理論
VMD基于維納濾波理論,Dragomiretskiy等在2014年引入VMD進行自適應信號處理。VMD是一個完全非遞歸的變分模態分解模型,在該算法中,本征模態函數(intrinsic mode function,IMF)被定義為一個有帶寬限制的調幅-調頻函數,VMD算法是通過構造并求解約束變分問題,將原始信號分解為指定個數的IMF分量。在對信號進行VMD分解之前,需要確定VMD的參數,即需要預先確定模數和懲罰因子。確定影響參數后,對信號進行VMD分解,得到一系列本征模函數。
1.1.2 VMD模數確定
采用一種由希爾伯特變換計算峰度值的方法,從而有效地優化VMD模數,本文采用懲罰因子和帶寬的默認值α=2 000,s=0,初始模數設為K=2,為了確定模數K的搜索范圍和步長,借鑒了唐貴基等[23]對模數K的討論范圍。如果模數K過大,效率低,計算負荷重;如果模數K過小,容易引入噪聲。所以選擇K∈[2,15]作為模數的搜索域,步長設置為1。
對采集到的振動信號進行VMD分解,計算設定模數K下各模態信號的包絡峰度值,通過比較得到該模數下包絡峰度的最大值,然后K=K+1繼續進行上述分析,直到取K=15,得到各模數下包絡峰度的最大值。
假設VMD的模數為K,K∈[2,15],可以計算出每個模的包絡,即
(1)

此外,K的第i個模式的包絡峰度計算如下
(2)
可以獲得局部最大ekK,max
ekK,max=max(ek1,ek2,ek3,…,ekK)
(3)
因為K的搜索范圍為[2,15],搜索步長設置為1,所以在整個搜索范圍內可以獲得14個局部最大值。因此,可以得到全局最大值
ekg,max=max(ek2,max,ek3,max,ek4,max,…,ek15,max)
(4)
根據式(4)可以得到取ekg,max時,對應的K值,用K′表示,其中K′可以從式(5)得到
K′=arg max(ekg,max)
(5)
1.1.3 IMF分量選擇
VMD方法獲得的各IMF分量包括了原始信號不同時間尺度的局部特征,前幾個IMF分量體現了原始信號的主要特征。為保證構造的灰度圖像能夠有效保留原始信號的故障特征,同時避免噪聲等成分的干擾,采用相關系數法篩選分解后的各個IMF分量,使用相關系數最大的IMF分量作為生成灰度圖像的數據。相關系數的計算公式[24]如下
(6)
式中:L為信號長度;ρ(i)為第i個IMF分量與原始信號x(t)之間的相關系數。
1.2 卷積神經網絡
1.2.1 輸入層
輸入層是整個卷積神經網絡的第1層,是卷積神經網絡獲取灰度圖像的途徑,表示輸入一張灰度圖片的像素矩陣。
1.2.2 卷積層
卷積層的主要作用是對灰度圖像進行特征提取,從而獲得比原始圖像抽象程度更高的特征。卷積層特征的計算公式如下
(7)
1.2.3 池化層

(8)
本文采用最大池化,池化層的作用是對圖像進行降維處理、縮減圖像的像素,從圖像中提取更多的特征。
1.2.4 損失函數
損失函數代表預測值和真實值的相似程度,是一個非負實值函數,損失函數值越小,說明模型的魯棒性越好。本文采用交叉熵函數作為損失函數,公式如下
(9)
式中:m為標簽數量;p(xij)為數據的標簽;f(xij)為分類器函數。
1.2.5 輸出層
通過卷積、池化和隨機失活處理后,圖像特征更加抽象。利用NIN(network in network)層代替全連接層,其中NIN層是指在卷積后面再跟一個1×1的卷積核和全局平均池化的組合,不僅省去了將特征圖展開的過程,還可以大幅減少輸入softmax層的參數。最后采用softmax函數將輸入的神經元轉化為和為1的概率分布,實現最終的分類,輸出得到輸入圖像屬于不同類別預測的概率值。
2 基于VMD-CNN的多傳感融合軸承故障診斷方法
2.1 基于VMD灰度圖像編碼
滾動軸承在實際工作中含有較強的背景噪聲,導致分析單一傳感器測得的信號難以得到全面的故障特征,影響故障識別的準確率,而較優傳感器位置的選取依靠試驗人員的實踐測試經驗。所以,本文在特征層面將篩選出的IMF分量進行依次排列并轉換成灰度圖像。
基于VMD灰度圖像編碼的主要步驟如下:
步驟1分別對驅動端和風扇端傳感器測得的原始振動信號x1和x2進行距離為n的等距分段。
步驟2將分段信號進行VMD。
步驟3篩選相關系數最大的IMF分量。
步驟4設所需構造的灰度圖像大小為n×n(一般取32×32,64×64,96×96等),可將寬度n分為2等分,構造出n×n/2的2個區域,按照區域的大小對各傳感器信號篩選的IMF分量依次排列填充。
為了更好的進行灰度圖像的對比,對篩選出的IMF分量進行歸一化處理,歸一化處理的公式如下
(10)
式中:x,y分別為歸一化前、歸一化后的數值;Vmax,Vmin分別為原始灰度圖像的最大值和最小值。
2.2 卷積神經網絡構建
為了能夠有效識別各種軸承狀態灰度圖像,需要設計合理的CNN。通過控制變量的方法對CNN進行試驗,確定最終網絡的結構和參數,試驗分組情況如表1所示。
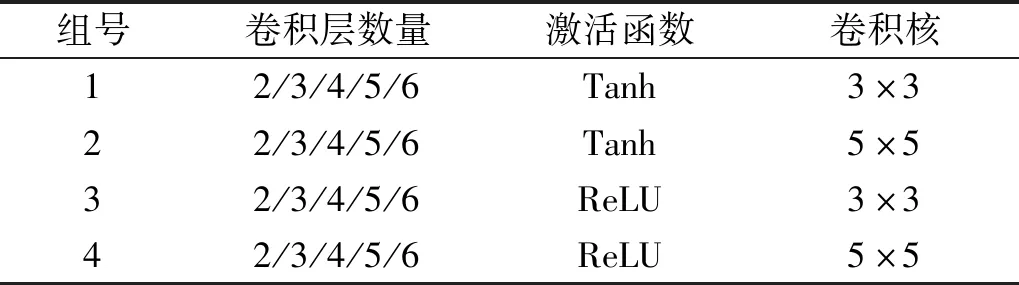
表1 試驗分組情況
通過數據集對表1中設計的各組網絡進行逐一訓練、測試對比,最終確定了網絡結構。卷積神經網絡總共15層,包含5個卷積層,4個池化層,4個隨機失活層,1個全局平均池化層,1個用于分類的softmax層即輸出層,使用3×3的卷積核,最后一層卷積層采用1×1的卷積核,采用ReLU作為激活函數,將全局平均池化層之后的分類輸出結果調整為10類。基于VMD-CNN的多傳感融合軸承故障診斷方法結構圖如圖1所示,卷積神經網絡各層參數如表2所示。
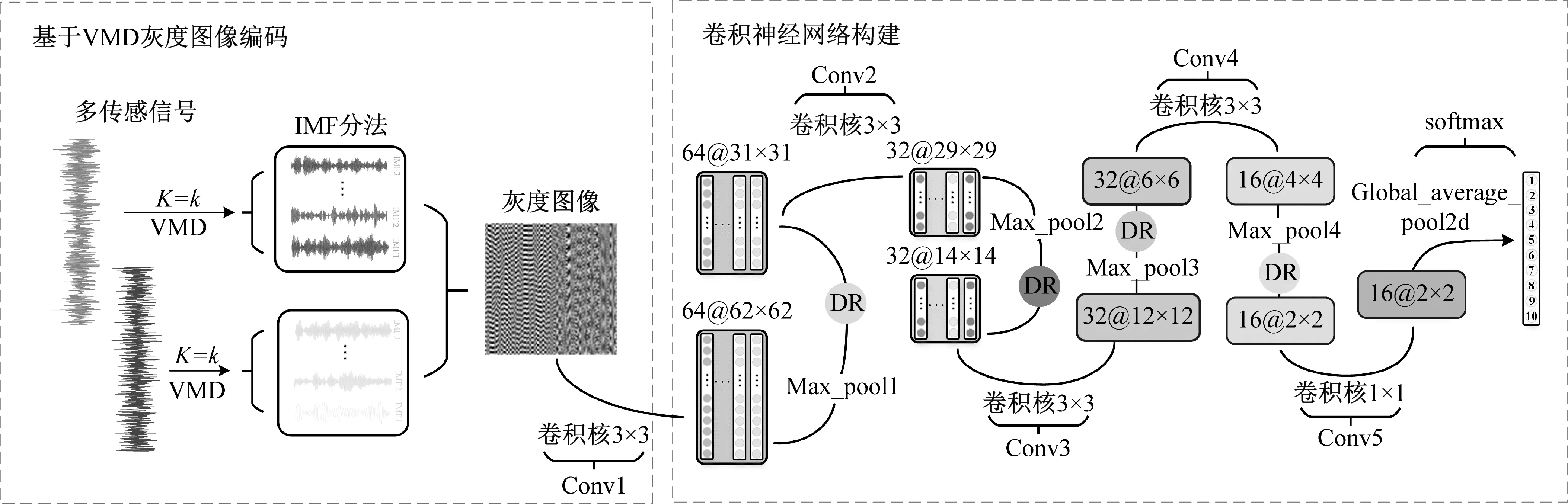
圖1 基于VMD-CNN的多傳感融合軸承故障診斷方法結構圖

表2 CNN網絡參數
2.3 滾動軸承故障識別算法
本文基于2.1節VMD灰度圖像編碼和2.2節卷積神經網絡構建,提出了基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法,整體算法流程圖,如圖2所示,具體數據處理步驟如下
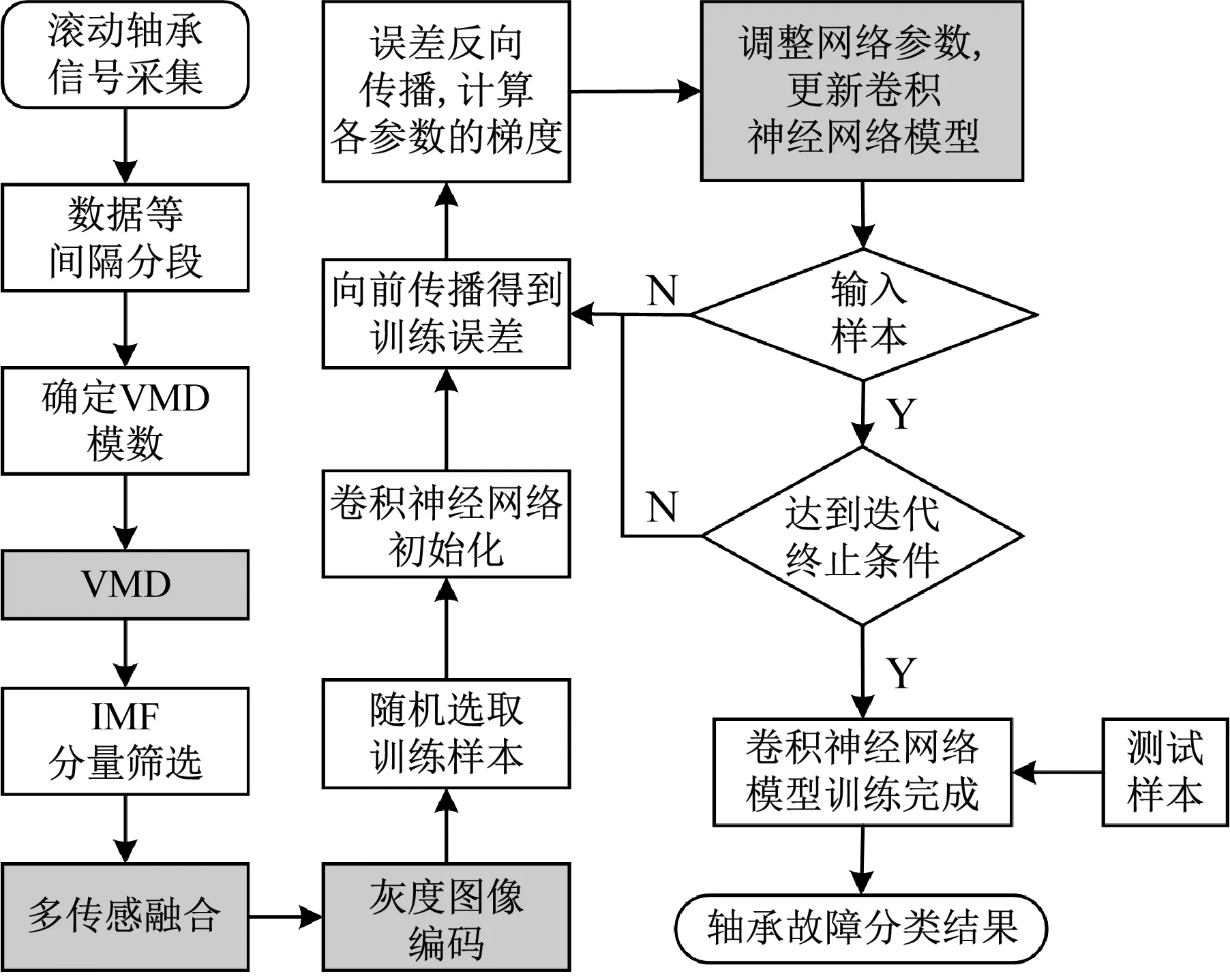
圖2 整體算法流程圖
步驟1將驅動端和風扇端傳感器采集到的原始振動信號數據進行等間隔劃分,制作樣本數據集。
步驟2選擇K∈[2,15]作為VMD模數的搜索域,對每一個樣本計算各模數下包絡峰度的最大值,從而確定該軸承狀態下VMD的最優模數。
步驟3對劃分好的各段數據進行VMD分解,利用相關系數對分解后的IMF分量進行篩選。
步驟4分別提取各階本征模態分量與原始信號相關系數最大的分量并進行歸一化處理,依次排列多傳感器篩選出的IMF分量累計構造數值矩陣。
步驟5將步驟4的數值矩陣轉換成灰度圖像,按照上述步驟將各軸承狀態的時間序列數據生成若干幅灰度圖像,作為CNN訓練和測試的數據集。
步驟6隨機劃分訓練集和測試集,利用訓練集訓練卷積神經網絡,同時在訓練過程中根據訓練結果優化、調整網絡結構和網絡參數。
步驟7利用測試集驗證卷積神經網絡的有效性,并預測圖片分類結果,從而得到軸承振動信號故障分類,輸出診斷結果并分析結論。
3 驗證及結果分析
3.1 CWRU數據集結果分析
3.1.1 試驗數據
試驗數據來源于美國凱斯西儲大學(Case Western Reserve University,CWRU)軸承數據中心的軸承數據集[25]。軸承型號為6205-2RS JEM SKF深溝球軸承,采用電火花加工技術在軸承上布置損傷,軸承損傷直徑有0.177 8 mm,0.355 6 mm和0.533 4 mm 3種。為了驗證所提出的方法可用于變工況下的故障診斷,在一定程度上可以克服轉速差異的影響,選取了4種轉速、正常狀態和3種故障類型、3種故障直徑下的數據,共40種工況的數據混合生成10種類別的灰度圖像,即正常狀態、內圈損傷0.177 8 mm、內圈損傷0.355 6 mm、內圈損傷0.533 4 mm、外圈損傷0.177 8 mm、外圈損傷0.355 6 mm、外圈損傷0.533 4 mm、滾動體損傷0.177 8 mm、滾動體損傷0.355 6 mm、滾動體損傷0.533 4 mm,美國凱斯西儲大學滾動軸承振動數據如表3所示。
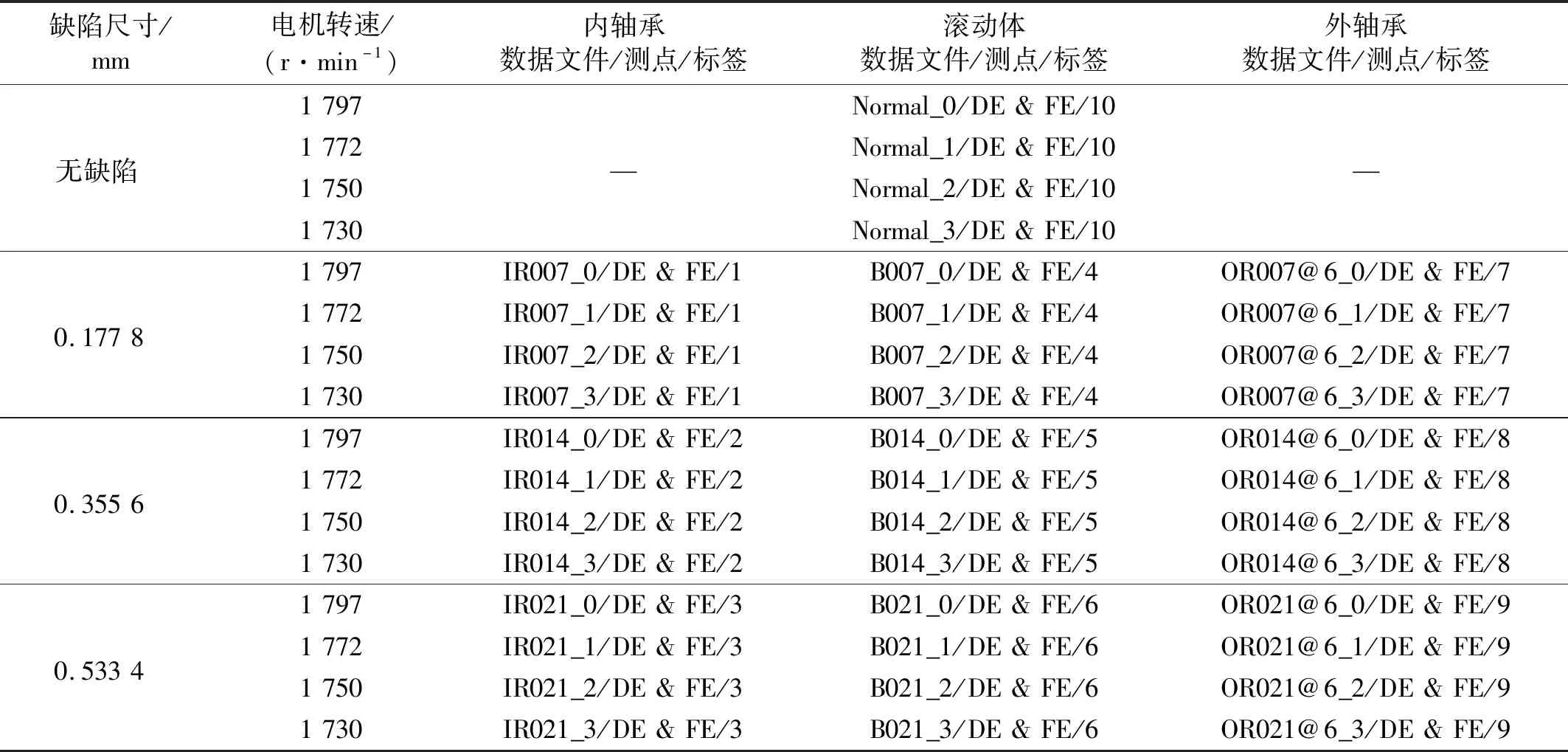
表3 CWRU滾動軸承振動數據
3.1.2 VMD模數分析
在搜索域中,DE端和FE端模式數K和包絡峰度最大值之間的關系,如圖3所示。針對軸承10種狀態樣本,可以得到DE端和FE端每個樣本取最佳模態數K′時包絡峰度的最大值。其關系如表4和表5所示。
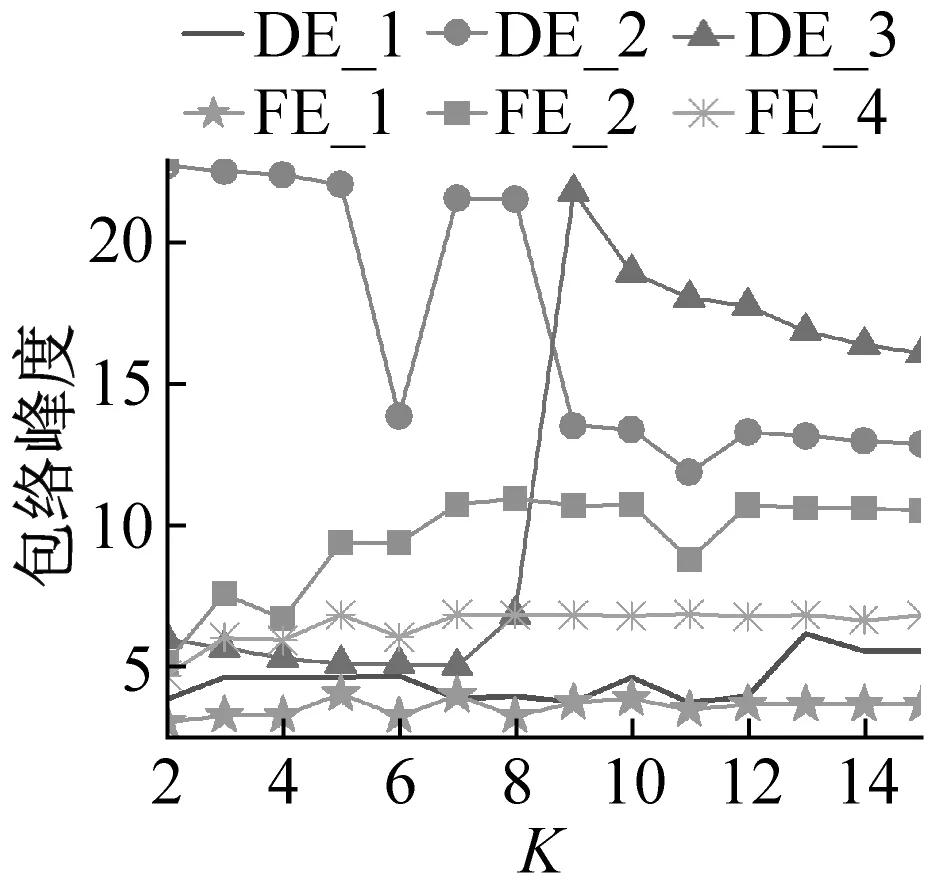
(a)

表4 DE端K′與全局最大包絡峰度的關系

表5 FE端K′與全局最大包絡峰度的關系
由表4和表5可知,具體樣本與最佳模態數一一對應,給出某個具體樣本的VMD分解示例。例如DE端樣本8,當K′=8時包絡峰度最大,根據樣本8使用具有8種模式的VMD分析原始信號,即在VMD分解之后,產生8個本征模函數,每個IMF分量的時域表示如圖4所示。
(a) IMF8
3.1.3 圖像轉換結果
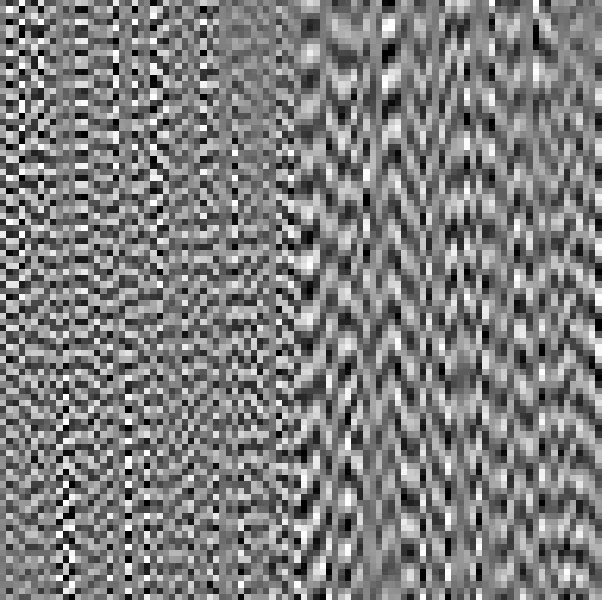
對原始振動數據等距分段時,采用了長度為32,64和96 3種情況,根據灰度圖構造方法,長度為32,64和96的信號分別可以構造出像素為32×32,64×64和96×96的灰度圖像,使用CWRU軸承數據進行試驗。分別將3種長度下的振動信號生成灰度圖像輸入網絡進行訓練,不同像素大小的測試集精度曲線,如圖5所示。其中,32×32的灰度圖像由于像素點太少,圖像特征不明顯,無法區分10類軸承狀態。像素為96×96的灰度圖像測試準確率略高于像素為64×64的測試準確率,且測試精度曲線收斂速度以及穩定性均優于像素為64×64的灰度圖像測試精度曲線,能夠較好地區分10類狀態。綜合考慮最終采用像素為96×96的灰度圖像作為CNN訓練和測試的灰度圖像像素。
由圖5可知,像素為96×96的灰度圖像測試精度曲線較像素為32×32和像素為64×64的測試精度曲線收斂速度快、平穩性好以及測試準確率高。像素為96×96的灰度圖像,如圖6所示。由圖6可知,經上述方法構造的10種不同狀態的軸承灰度圖像具有明顯不同的特征。
(a)
3.1.4 試驗結果及對比分析
根據表3所示的數據,一共生成4 000張灰度圖像。將圖像進行隨機分配,每種狀態訓練集和測試集的分配數量分別為320和80。
將網絡運行5次,每次測試得到的測試集識別準確率如表6所示。其中,第5次測試的訓練集和測試集精度變化曲線如圖7所示,第5次測試的訓練集和測試集損失變化曲線如圖8所示。在訓練中一次迭代指所有數據在網絡中完成一次前向計算及反向傳播的過程。準確率反映了模型正確識別的圖像比例,損失率用來評估模型的預測值與真實值的不一致程度。準確率越大、損失率越小,說明模型的識別能力和魯棒性越好。由圖7和圖8可知,無論訓練還是測試,精度曲線迅速上升并趨于穩定,損失曲線迅速下降并趨于穩定,經過100次迭代后,最終的測試精度和損失的值分別為100%和0.25%。
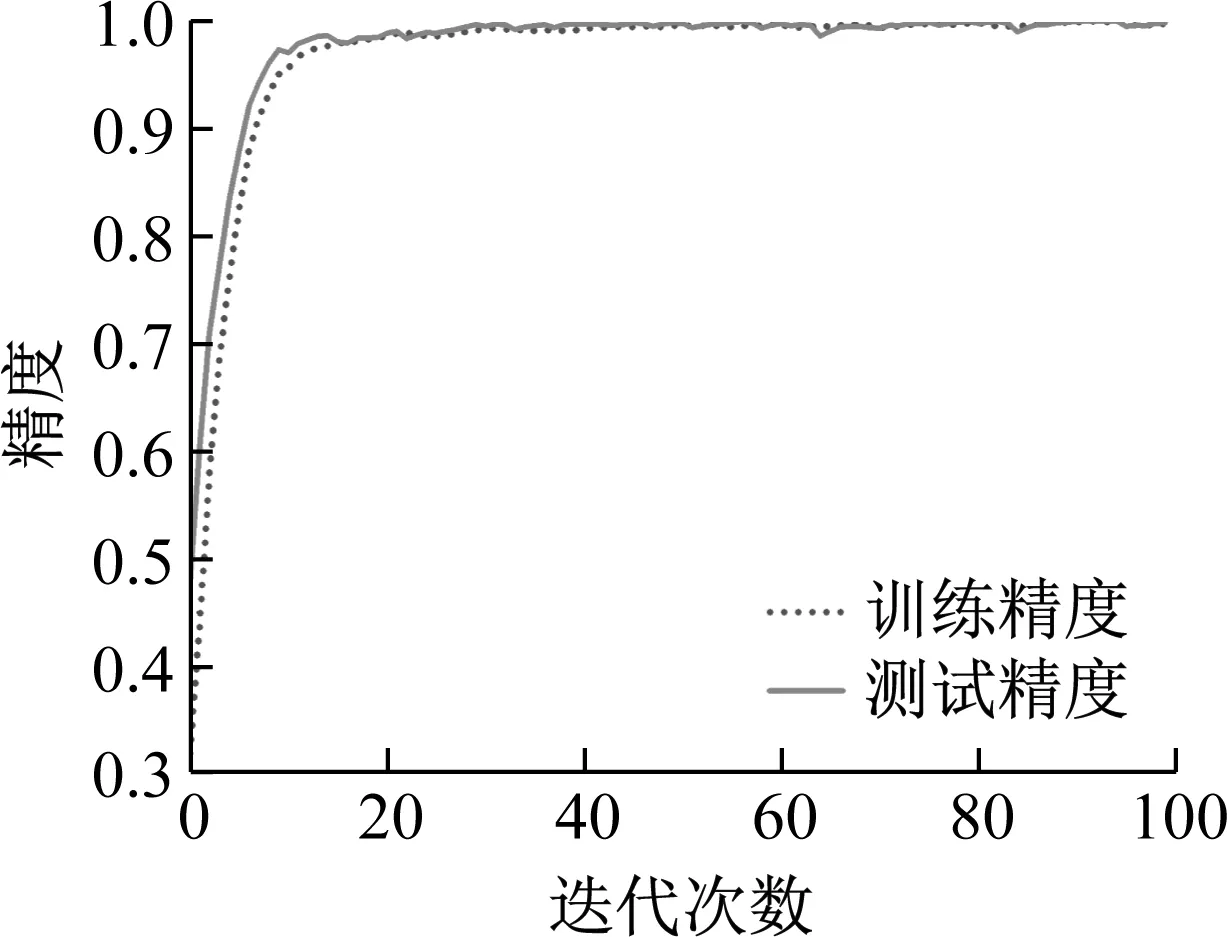
圖7 訓練集和測試集精度變化
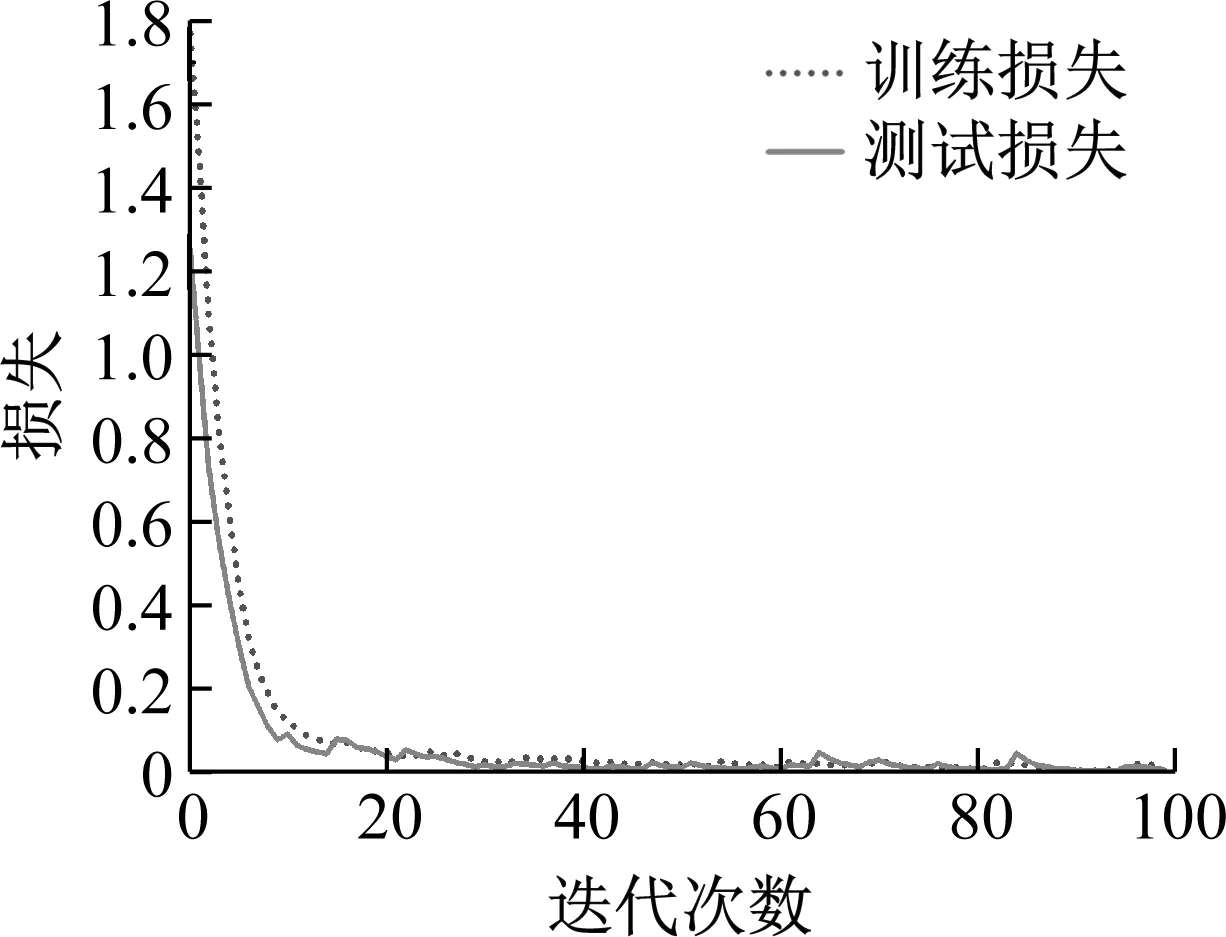
圖8 訓練集和測試集損失變化

表6 多次測試的測試集結果
分析表6中的數據,本文提出的方法獲得了較好的結果,5次測試的測試集平均識別準確率為99.90%。由此可見,利用基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法分析軸承振動信號能夠有效實現滾動軸承故障診斷且穩定性較高。
為了表示不同工況下每類故障的具體診斷情況,給出分類結果混淆矩陣,第5次測試結果的混淆矩陣,如圖9所示。其中橫軸表示預測類別,縱軸表示實際類別,對角線數值表示每一類別測試樣本的分類準確率,非對角線位置的數值表示某一故障狀態分類的錯誤率。從混淆矩陣結果圖可以看出,10種故障類別的分類正確率均達到100%。
為了驗證本文所提出的方法,即基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法能有效識別軸承的故障類別,主要利用以下幾種方法進行對比分析:①分別利用單一傳感器測得的信號(驅動端和風扇端)進行VMD生成灰度圖像作為CNN的輸入(CNN模型與本文構造的一致,僅改變輸入),得到2組對比結果(結果取5次測試的測試集平均識別準確率);②基于EMD二值化圖像和CNN的滾動軸承故障診斷方法;③基于變分模態分解和排列熵的滾動軸承故障診斷方法。本文提出的滾動軸承故障診斷方法與4種對比方法的比較結果,如表7所示。
由表7可知,本文提出的方法具有很高的故障識別準確率,識別效果優于其他4種方法,具有很好的泛化能力。
3.2 XJTU-SY數據集結果分析
3.2.1 試驗數據
為了進一步驗證本文提出方法的有效性,采用XJTU-SY滾動軸承加速壽命試驗數據集進行驗證[27]。XJTU-SY數據集采集了軸承從正常到故障狀態的振動信號,包括單一故障和復合故障,覆蓋了不同的故障位置。為了驗證所提出方法的軸承故障診斷效果,選取了垂向和水平兩個方向的振動信號,具體為3種工況、3種單一故障、2種復合故障類型下的數據,共9種工況的數據混合生成5種類別的灰度圖像,如表8所示。

表8 XJTU-SY滾動軸承加速壽命試驗數據集
3.2.2 試驗結果及分析
根據本文提出的方法對XJTU-SY數據集進行試驗,像素為96×96的灰度圖像,如圖10所示。將網絡運行5次,每次測試得到的測試集識別準確率如表9所示。其中,第4次測試的訓練集和測試集精度變化曲線如圖11所示,第4次測試的訓練集和測試集損失變化曲線如圖12所示。
(a)
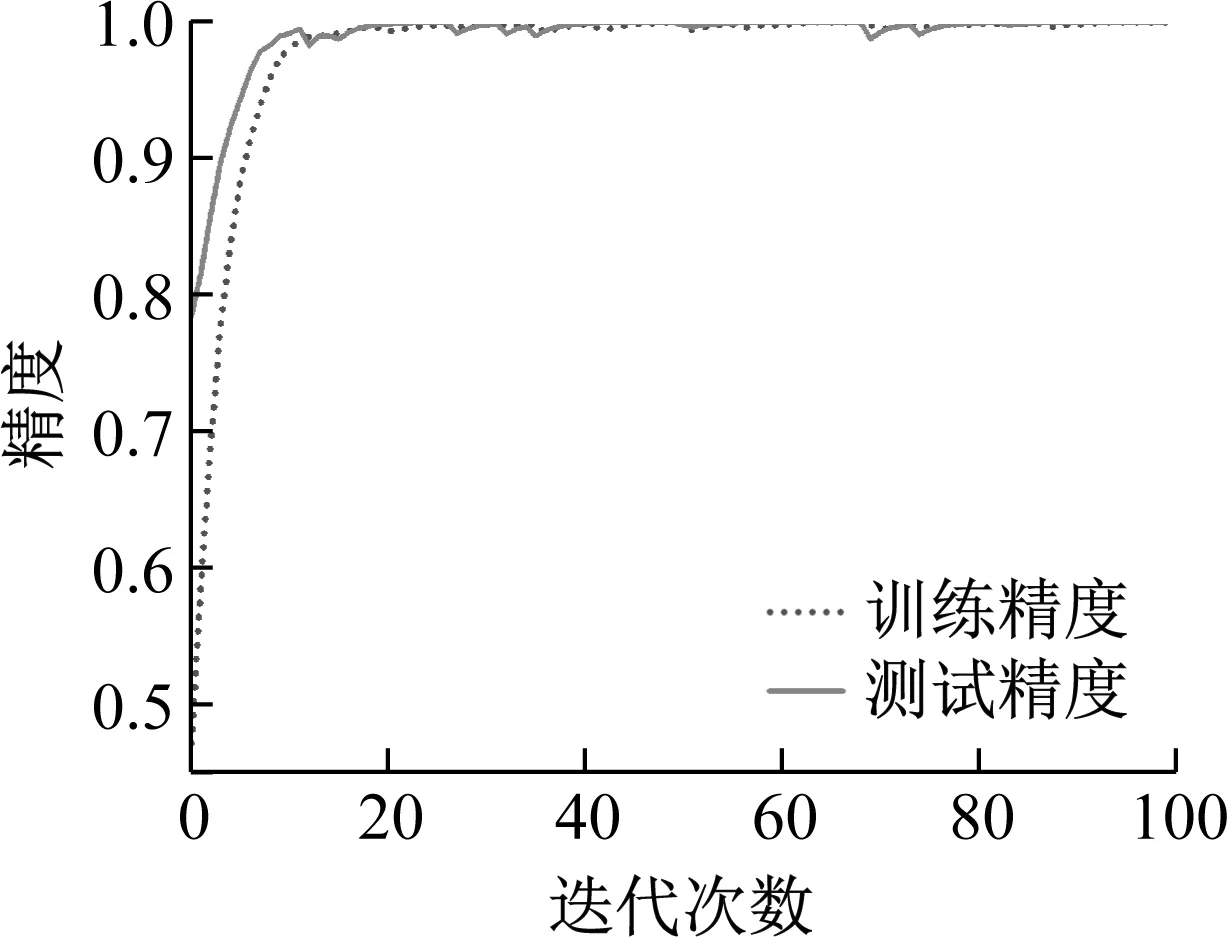
圖11 訓練集和測試集精度變化

圖12 訓練集和測試集損失變化
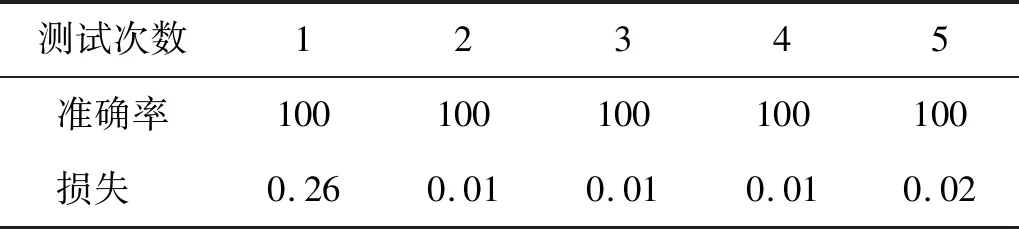
表9 多次測試的測試集結果
分析表9中的數據,5次測試的測試集平均識別準確率為100%。由此可見,利用基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法能夠有效實現滾動軸承故障診斷。
對比圖7和圖11可以看出,所提出的基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法在CWRU數據集和XJTU-SY數據集上都能夠快速收斂并趨于穩定,準確率較高。說明該方法具有一定的魯棒性和通用性。
圖13為第4次測試結果的混淆矩陣。從混淆矩陣結果圖可以看出,5種故障類別的分類正確率均達到100%。
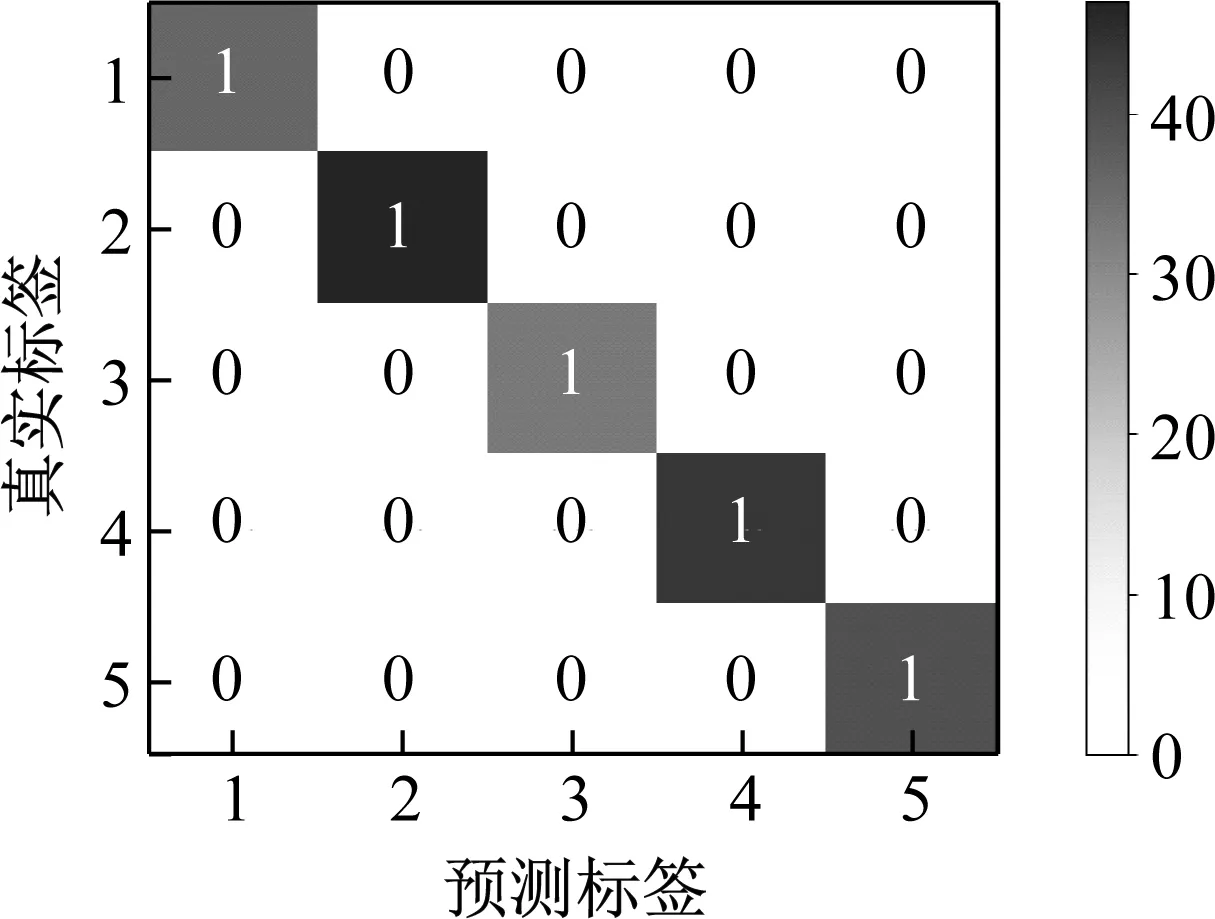
圖13 故障分類混淆矩陣
3.3 抗噪性能測試
3.3.1 CWRU數據集抗噪性能測試結果
為了測試本文所提出方法的抗噪性能,分別在10種軸承類別下各加入40張添加方差為0.01高斯噪聲的加噪灰度圖像,加噪后10種軸承類別的灰度圖像,如圖14所示。將網絡運行5次,加噪后每次測試得到的測試集識別準確率如表10所示。其中,圖15為加噪前后第4次測試結果的測試集精度變化曲線對比。

(a)

圖15 加噪前后測試集精度變化曲線對比

表10 加噪后多次測試的測試集結果
由圖15可知,2種曲線的整體變化趨勢非常接近,加噪后最終識別的平均準確率略有降低,平均測試準確率為99.75%,略低于原始信號的平均測試準確率99.90%,說明加入噪聲圖像對網絡影響非常小,證明了本文所提出的CNN網絡模型具有很強的抗噪能力。
3.3.2 XJTU-SY數據集抗噪性能測試結果
在5種軸承類別下各加入40張添加方差為0.01高斯噪聲的加噪灰度圖像,加噪后5種軸承類別的灰度圖像,如圖16所示。將網絡運行5次,加噪后每次測試得到的測試集識別準確率如表11所示。加噪前后第5次測試結果的測試集精度變化曲線對比,如圖17所示。由圖17可知,2種曲線的整體變化趨勢非常接近,加噪后最終識別的平均準確率略有降低,平均測試準確率為99.90%,略低于原始信號的平均測試準確率100%,說明本文所提出方法具有優異的抗噪性能。
(a)
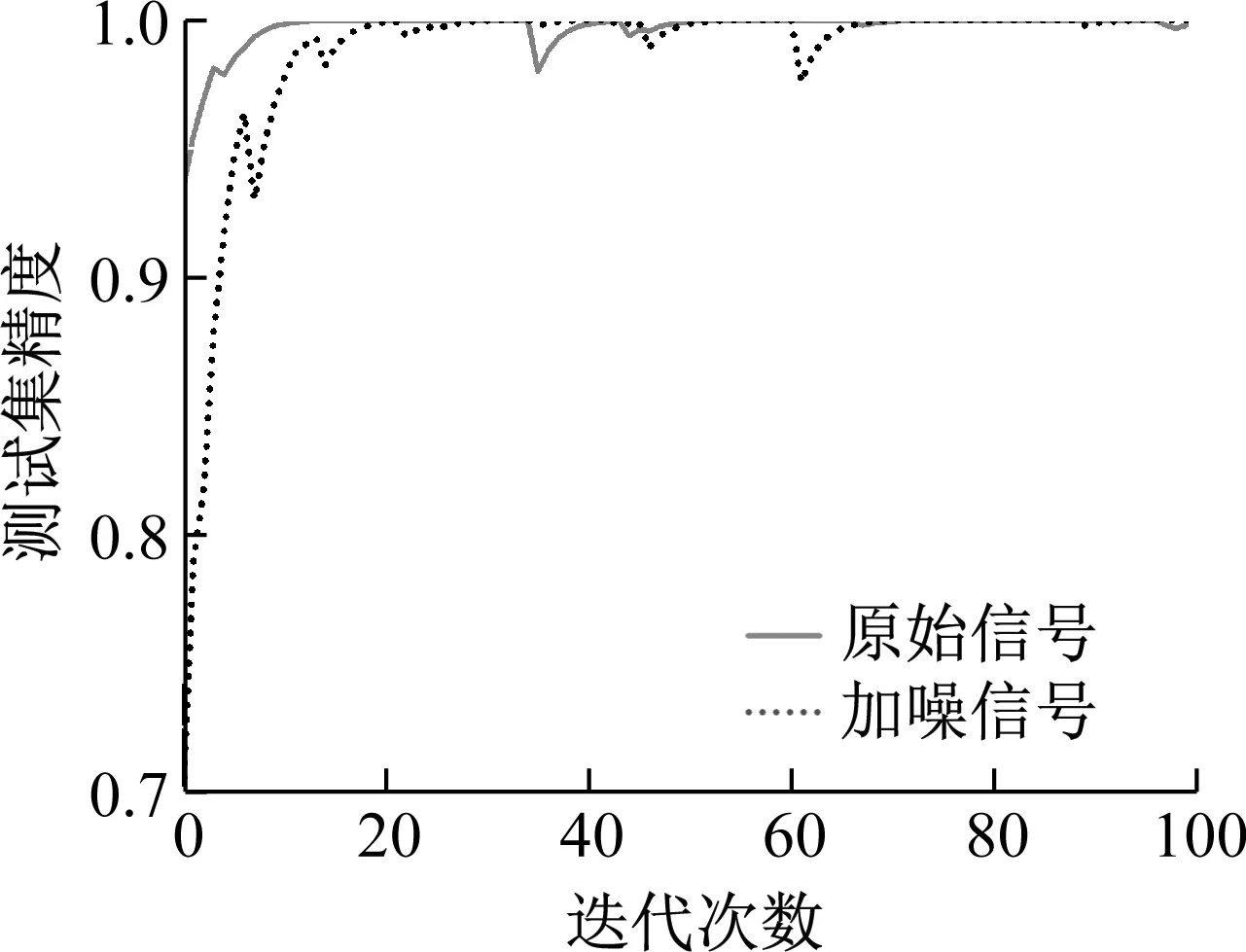
圖17 加噪前后測試集精度變化曲線對比

表11 加噪后多次測試的測試集結果
4 結 論
針對滾動軸承振動信號非平穩、非線性且易受噪聲干擾的特點,以及單一振動信號對某些軸承故障識別率偏低的問題,提出一種基于VMD灰度圖像編碼和CNN的多傳感融合軸承故障診斷方法。將多傳感器振動信號轉化為具有明顯特征的灰度圖像,實現了在變工況情況下滾動軸承不同故障類型及損傷程度的診斷。主要結論如下:
(1) 采用VMD對驅動端和風扇端傳感器測得的原始振動加速度數據分解,篩選各階本征模態分量與原始信號相關系數最大的分量并轉換成灰度圖像作為CNN的輸入,避免了最優傳感器布置位置的選取,降低了對測試者實際測試經驗的需求。
(2) 所設計的卷積神經網絡收斂速度快且具有較好的魯棒性,在CWRU數據集和XJTU-SY數據集上平均測試準確度分別達到99.90%和100%,表現出良好的泛化能力;抗噪能力測試中,在CWRU數據集和XJTU-SY數據集上平均測試準確度達到99.75%和99.90%,體現了本文所提方法優異的抗噪能力。
(3) 相同條件下,多傳感器信息融合的正確率為99.90%,比單一傳感器的診斷正確率分別提高了0.70%和1.20%,采用信息融合方法比采用單一傳感器進行故障診斷的準確率高。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
