行星傳動系統嚙入沖擊提取技術及驗證
2023-11-14 06:02:36胡升陽方宗德侯祥穎杜進輔
振動與沖擊 2023年21期
關鍵詞:信號
胡升陽,方宗德,劉 超,侯祥穎,杜進輔,沈 剛
(1.安徽理工大學 機械工程學院,安徽 淮南 232001;2.西北工業大學 機電學院,西安 710072;3.西安理工大學 機械與精密儀器工程學院,西安 710048;4.南京航空航天大學 機電學院,南京 210016)
由于安裝誤差、制造誤差及輪齒負載變形,齒輪在嚙合時會偏離理論嚙合線,產生沿嚙合線方向上的相對速度,引起輪齒間嚙入沖擊的產生。嚙入沖擊受轉速的影響,會加劇傳動系統的振動和噪音,惡化操作人員的工作環境以及齒輪傳動系統的正常工作壽命。
長期以來,關于齒輪傳動過程中的嚙入沖擊,一直都有國內外學者在關注。Lin等[1]利用商用有限元軟件完成了嚙入沖擊仿真,對不同速度和載荷下的嚙入沖擊力進行了計算與分析;Yu等[2]提出了考慮嚙入沖擊影響的(loaded tooth contact analysis,LTCA)模型,并計算分析了考慮和不考慮嚙入沖擊時齒輪傳動系統的動態響應差異;周長江等[3]則建立了線外嚙入沖擊摩擦模型,計算了接觸點的沖擊摩擦力與摩擦因數;王峰等[4]建立了考慮相鄰齒對影響的線外嚙入沖擊模型,指出當發生嚙入沖擊時,其他正常嚙合的齒對將對進入嚙合齒對的嚙入沖擊起到緩沖作用;敦芳等[5-6]則分析了考慮基距誤差和修形條件下的齒輪嚙入沖擊特性,獲得了考慮齒距誤差的嚙入沖擊實際變化規律以及對齒輪系統動態特性的影響,并提出了一種考慮齒距誤差的嚙入沖擊新算法;賈超等[7-9]則分析了高速狀態下的齒輪嚙入沖擊激勵特性,并提出了針對高速齒輪嚙入沖擊的修形方法;Mu等[10-11]則基于斜齒輪嚙入沖擊分析模型提出了弧齒錐齒輪的嚙入沖擊模型;He等[12]進一步完善了斜齒輪嚙入沖擊解析模型構建方法以及嚙入沖擊對齒輪副動態特性的影響;此外,Liu等[13]與Yang等[14]則在構建考慮不對稱誤差的人字齒輪嚙入沖擊算法上進行了深入研究;以上皆為針對單對齒輪副嚙入沖擊的理論分析方法,直至Hu等[15-16]首次提出試驗提取方案,并成功實現了單對斜齒輪副嚙入沖擊信號的獲取,且與理論模型在嚙入沖擊時間、嚙入沖擊位置和嚙入沖擊力上得到了對比驗證。
然而,上述研究對象皆圍繞單對齒輪副展開,未能深入傳動系統嚙入沖擊特性。隨著工業的發展,單對齒輪副嚙入沖擊模型已不能滿足實際生產的需要,若簡單地將行星傳動系統劃分為多對獨立的內外嚙合副嚙入沖擊,視各嚙合周期的嚙入沖擊相同,以此來分析嚙入沖擊對傳動系統的均載和動載特性影響將是不合理的。這是由于行星傳動系統包含多對內外嚙合齒輪副的同時各支路間亦存在相關性,并且各齒輪的偏心誤差與安裝誤差也皆不相同,致使各內外齒輪副在每個嚙合周期的嚙入沖擊位置點和嚙入沖擊力都存在較大的差異。
考慮到傳動系統制造誤差、安裝誤差等的隨機性以及嚙入沖擊的非線性特點,通過理論手段構建精確的系統嚙入沖擊數學解析模型是難以完成的任務。為此,本文結合試驗,借助希爾伯特-黃變換(Hibert-Huang transform,HHT)、小波降噪及瞬時頻率理論成功分離提取出行星傳動系統各支路嚙入沖擊信號,并與有限元模型和理論模型結果進行對比驗證,結果表明本文所提試驗方法可避免復雜系統嚙入沖擊數學解析模型的構建過程,并可準確判定運行過程中存在嚙入沖擊的輪齒,所獲結果的規律性、趨勢以及數值均是準確有效的。
1 傳動系統測量試驗設計
1.1 試驗測量方法設計
本文以某5個行星齒輪傳動系統為例,展開分析論述,系統的相關參數如表1所示。
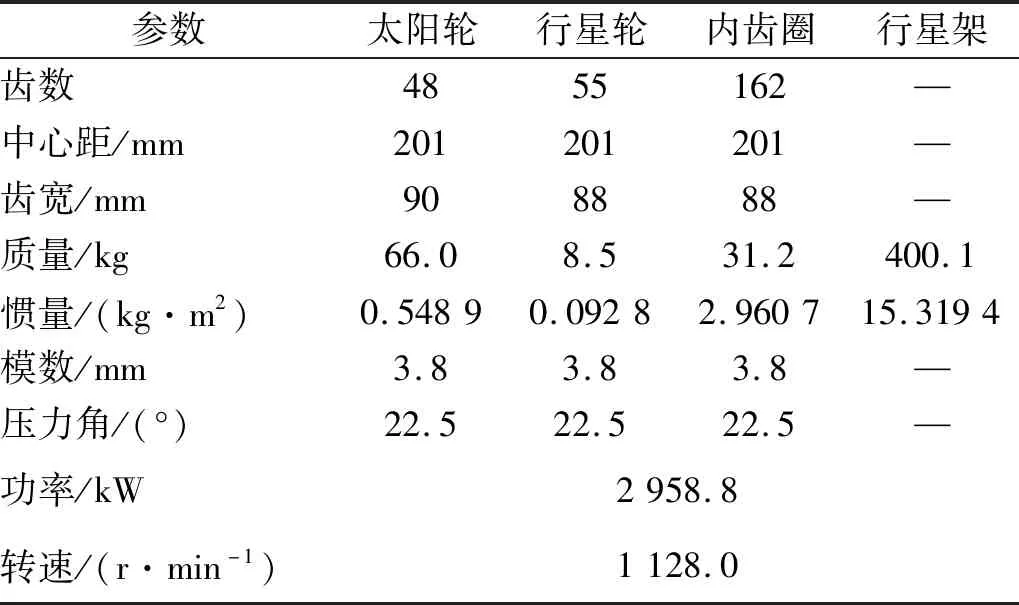
表1 行星齒輪傳動系統各構件參數
為避免試驗平臺的重復搭建,降低提取難度和工作量,故本文依靠行星傳動系統均載與動載性能試驗應變信號,經由HHT、小波降噪與瞬時頻率,精確提取了傳動系統各支路嚙入沖擊信號。
1.1.1 傳感器設計
采用應變片電橋測量方式組成傳感器[17],如圖1所示。圖1中應變片R1,R2分別粘貼于固定不轉的內齒圈齒輪齒根受壓側和受拉側,與外接電阻R3,R4組成電橋。為避免粘貼于齒根位置造成的應變片破壞以及提高測量的精準度,故采取粘貼于內齒圈端面方式。此外,按照ISO標準[18],內齒圈齒根最大應力位于齒根過渡曲線60°處,外齒輪齒根最大應力位于齒根過渡曲線30°處,按照上述位置粘貼應變片,靈敏度較高。故設置應變片長軸方向與輪齒中心線成60°角(如圖2所示),并與齒根過渡曲線相切。
應變片R1,R2分別粘貼于齒根受拉側和受壓側,但這兩片應變片是電橋相鄰邊,因此電橋的輸出為拉伸應變和壓縮應變之和,提高了傳感器的靈敏度。且由于應變片R1,R2位置相近,可實現一定的溫度補償作用。
由上述應變橋組成的傳感器輸出的信號,將與齒根應力成正比,而齒根應力又與輪齒齒面載荷成正相關,故傳感器輸出信號的大小,可依據比例準確表達行星輪系的各支路動態嚙合力情況,進而獲知系統各支路的嚙入沖擊力情況。
1.1.2 齒根應力隨嚙合過程的變化規律
齒根應力隨行星輪與內齒圈嚙合過程的變化規律,如圖3所示,貼應變片的內齒圈輪齒為當前齒。當當前齒尚未進入嚙合而當前齒的前一對齒已在嚙合狀態時(見圖3(a)),前一對嚙合齒已經在當前齒應變片粘貼處產生應力,此時R1受拉、R2受壓,是當前齒齒根的主要應力。隨后當前齒進入嚙合,此時R1受壓、R2受拉,應力方向與前一對齒嚙合時相反,而且當前齒產生的齒根應力更大,成為主要應力(見圖3(b))。隨行星輪與內齒圈的進一步嚙合,前一對齒脫開嚙合,而當前齒的后一對齒進入嚙合,此時當前齒產生的齒根應力仍然是主要應力。隨嚙合繼續,當前齒脫開嚙合,則后一對齒在應變片處產生的應力成為主要應力。

(a) 前一對齒嚙合
1.1.3 傳感器輸出信號
在行星輪傳動系統中,對于行星齒輪和內齒圈嚙合副,內齒圈為被動輪,即在嚙合過程中,內齒圈齒頂首先進入嚙合,從齒根退出嚙合。而齒頂嚙合時齒根應力較大,齒根嚙合時齒根應力較小。調整傳感器輸出信號的正負極性,使R1受拉、R2受壓時信號為正。
如1.1.1節分析,在前一對齒的內齒圈齒輪齒頂嚙合時,傳感器輸出負信號;而當前齒嚙合時,傳感器輸出正信號,而且此時信號幅值最大。考慮應變信號(應力值)與齒面載荷成正比,如圖4所示,因此前一對齒的負幅值與當前齒的正幅值之間的差值可以作為齒面載荷的度量。

圖4 傳感器的輸出信號
1.2 試驗測量方法說明
(1) 采用分別粘貼于內齒圈齒根受壓側和受拉側的應變片R1,R2組成圖1所示電橋的相鄰邊,因壓應力和拉應力信號可以疊加,從而提高了傳感器的靈敏度。此外,應變片R1,R2組成電橋的相鄰邊,且位置相近,從而起到一定的溫度補償作用。
(2) 齒根應力與齒面載荷是成正相關的,因此電橋信號與齒面載荷成線性關系,即傳感器測量信號與齒面載荷是線性的,保證了傳感器在測量齒面載荷時的準確度。
(3) 由于傳動系統的嚙入沖擊與各支路齒面載荷成相對比例關系,而非齒面載荷的絕對數值。由以上特點(2)知,傳感器電橋的輸出電壓即可表示齒面載荷的相對關系,故無需標定,直接由傳感器電橋的輸出電壓即可得到傳動系統的嚙入沖擊特性、均載特性等。
(4) 由于內齒圈是固定不轉的,因此傳感器信號可以直接由信號線引出,而無需通過引電器或調頻發射器間接導出,極大地提高了測量精度。
(5) 由圖4可知,傳感器的輸出信號的特點是正、負最大值之間的相對差值,可避免測量過程中由于環境噪聲所造成的零飄影響。
1.3 行星輪系測試結果
為保證試驗數據的有效性,故設計多種傳遞扭矩和轉速試驗工況,且每種工況下進行至少20次的試驗和數據采樣,并令每次試驗工況的扭矩和轉速盡可能保持一致。
本文作為示例的行星傳動系統試驗測試平臺圖,如圖5所示。內齒圈試驗件貼片圖,如圖6所示。
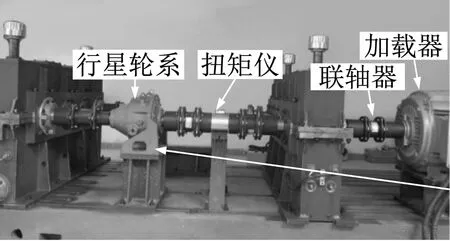
圖5 行星傳動系統試驗測試平臺
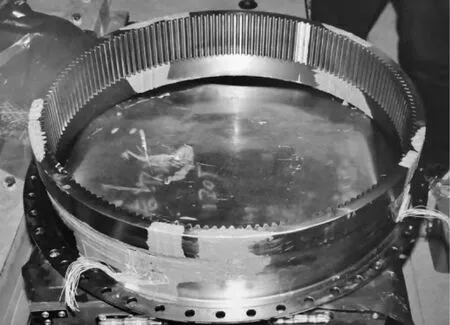
圖6 內齒圈試驗件貼片圖
考慮到論文篇幅,本文繪制了所選示例行星傳動系統在轉速39.5 r/min下行星齒輪繞內齒圈運轉一周后的應變片試驗數據。此時,每個應變片的信號包含5個行星齒輪依次內齒圈嚙合的應變信號,具體如圖7所示。
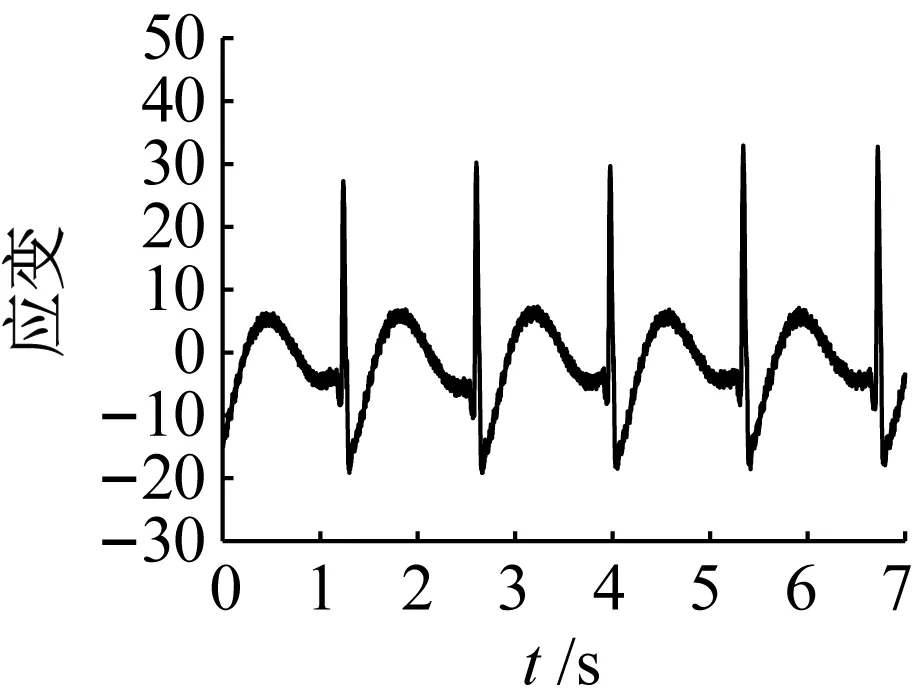
(a) 應變片1信號
2 系統嚙入沖擊試驗提取
由于試驗中所獲取的應變信號包含了多種信號成份,其中噪聲和干擾的存在給嚙入沖擊信號的獲取增加了難度。為最終分離并獲取所需的嚙入沖擊試驗信號,需借助信號分析處理方法。現有的信號分析處理方法,通常采用傅里葉分析理論,因傅里葉變換是一種純頻域的分析方法,它在頻域中的定位是完全準確的,但在時域中卻無任何定位分辨能力,即不能提供任何局部時間段的頻域性質,而時頻局部性質是非平穩信號最基本和最關鍵的性質,這決定了傅里葉頻譜分析無法適用于本試驗的信號處理分析。HHT[19-20]首次打破了傅里葉變換的傳統思想,開創了信號時域分析的新局面,HHT的結果反映的是信號的時頻特征,可實現對局部特征的反映,即信號的頻域特征隨時間變化的規律。相對于傅里葉變化得到的是信號的頻率組成,HHT還可以獲取頻率成分隨時間的變化,并真正明確了瞬時頻率值的意義,從而為分析信號在局部時間點上的瞬態特性提供了重要的方法與理論依據。本文亦將借助HHT方法展開對試驗信號的分析研究。
具體試驗提取的思路與步驟如下:
步驟1通過采用HHT對試驗采樣的應變信號數據進行解調。由于所獲取的應變試驗信號中包含多種高頻雜波信號,借助小波理論求取默認閾值實現去除高頻雜波信號,如圖8(a)、圖8(b)所示。

圖8 應變信號小波降噪及嚙入沖擊判定(39.5 r/min)
步驟2依據嚙入沖擊特性可知,提前的齒頂嚙入必將導致原齒根應力出現變化,造成信號瞬時頻率的突變。當當前輪齒出現齒頂的提前嚙入時,將導致齒根應變片R1受壓,進而導致圖4中原負信號出現正信號跳動。而當下一對齒輪副的輪齒出現提前嚙入沖擊時,則又將造成應變片中的原正信號轉變為負信號。利用瞬時頻率理論分析應變的時域波形,可確定頻率異常波動點位置,判定嚙入沖擊產生的位置點及時間點。從嚙入碰撞的發生點至相對速度為零點,期間為嚙入沖擊的能量消耗過程即嚙入沖擊的作用時間,為嚙入沖擊致使齒面產生承載變形的過程,至此可獲取所需的嚙入沖擊信息。
圖8(a)和圖8(b)分別為應變片在轉速39.5r/min下的齒根應力的應變信號及經小波降噪處理后的應變信號。圖8(c)則為圖8(b)信號的瞬時頻率變化情況。通過對濾波降噪后的應變信號求取瞬時頻率,可確定應變信號波形任意時刻下的頻率異常變化情況,結合1.1節中有關齒根應力的分析,即可獲取嚙入沖擊的碰撞點(如圖8(d)所示)。由圖8(d)可得,因嚙入沖擊力所造成的應變片變形量(初始嚙入沖擊碰撞點至嚙入相對速度零點,期間為輪齒表面受力變形階段,該階段造成了原信號的激增,激增部分即為由嚙入沖擊所引起的應變量)及嚙入沖擊位置點和作用時間等。
圖8中最大應變波峰值為輪齒進入正確嚙合位置后受法向嚙合力影響所產生的變形,非嚙入沖擊力所引發的變形量。通過與齒根應力波動幅值對比并結合行星傳動系統內嚙合齒輪副法向嚙合力幅值可進一步確定嚙入沖擊力的大小。由圖8(d)可知,時齒輪副的轉速較低,故嚙入沖擊較弱,通過與法向齒面載荷對比可得嚙入沖擊力幅值約為320.9 N。此外,分析各行星輪與內齒圈嚙合時的嚙入沖擊發現,由于各構件制造和安裝誤差存在差異性,造成了不同內嚙合副的嚙入沖擊位置點及嚙入沖擊力的大小亦不同,與真實工況下行星傳動系統的嚙入沖擊特性是相一致的,具體如表2所示。圖8中,“嚙入速度零點”表示嚙入速度等于零的位置,表明由嚙入沖擊所引發的變形過程在該點結束,具體詳述見提取思路與步驟2。“原信號推測線”表示當未產生嚙入沖擊作用時應變信號線的推測位置。

表2 試驗嚙入沖擊力分析結果
應變片在轉速755.6 r/min下的齒根應力的應變信號及經小波降噪處理后的應變信號,如圖9(a)、圖9(b)所示。圖9(c)則為對圖9(b)的應變信號求取瞬時頻率所得頻率變化情況。通過分析,同樣獲取了該轉速下嚙入沖擊的碰撞點(如圖9(d)所示)、因嚙入沖擊力所造成的應變片變形量及嚙入沖擊作用時間等。通過分析圖9(d)可知,由于系統轉速的提高,導致嚙入沖擊增強,經分析后可得該轉速下嚙入沖擊力幅值約為5 211.6 N,具體如表2所示。

圖9 應變信號小波降噪及嚙入沖擊判定(755.6 r/min)
應變片在轉速1 128 r/min下的齒根應力的應變信號及經小波降噪處理后的應變信號分別如圖10(a)和圖10(b)所示。
圖10(c)則為對圖10(b)的應變信號求取瞬時頻率所得頻率變化情況。通過分析,同樣獲取了該轉速下嚙入沖擊的碰撞點(如圖10(d)所示)、因嚙入沖擊力所造成的應變片變形量及嚙入沖擊作用時間等。由圖10(d)可知,隨著齒輪副轉速的進一步提高,嚙入沖擊力幅值增至7 623.2 N。具體見表2。
此外,文中所測量的行星輪和內齒圈之間的嚙入沖擊力會受到太陽輪與行星輪之間的嚙入沖擊影響。考慮到在真實工況下該影響是無法規避且其亦是導致內齒圈與行星輪之間嚙入沖擊越發嚴重的重要因素,因而本文試驗提取方案中未去除外嚙合副嚙入沖擊對內嚙合副的影響。
3 系統嚙入沖擊提取技術驗證對比
由于文中所提出的試驗提取方法是全新的技術思路,因此需對試驗提取嚙入沖擊的準確性進行驗證。考慮到試驗無法去驗證試驗,全系統的嚙入沖擊理論模型更是難以構建。故本文通過模擬齒輪副動態嚙合狀態以構建單對齒輪副動態解析模型,并結合有限元技術創建考慮誤差影響的參數化有限元嚙入沖擊分析模型,從而為驗證試驗結果合理性提供對比模型。
3.1 理論解析驗證模型
考慮到有關于外嚙合齒輪副的嚙入沖擊分析已經較為完善,相關推導過程可詳見文獻[21],故本文不再贅述。目前雖然對于線外嚙入沖擊的研究文獻較多,但對象均為外嚙合齒輪副,對于內嚙合齒輪副的嚙入沖擊特性未有涉及。由于行星傳動系統包含內外兩種嚙合副,本文在現有外嚙合嚙入沖擊模型的基礎上,推導構建了內嚙合齒輪副線外嚙入沖擊分析模型,從而完成了對于內嚙合副線外嚙入沖擊點及嚙入沖擊力的求取。
圖11(a)所示為內嚙合齒輪副線外嚙入沖擊原理圖,圖11(a)中主動輪圓心為O1,被動輪圓心為O2,理論無誤差下的正常嚙入點為E,由誤差導致的提前嚙入起始點為D,E′為正常嚙入點E的反轉點,根據嚙入原理和幾何關系可以求出線外嚙入初始點D的準確位置。
其中 ΔO1DO2
(1)
其中,
∠PO2D=γ2+φk+Δφ2
(2)
γ2=π/2-α-∠O1EO2
(3)
(4)
(5)
(6)
(7)
依據漸開線方程基本性質
invλ=tanλ-λ
(8)
嚙入沖擊時間Δt可由式(9)求得
(9)
式中:Δφ1和Δφ2分別為計算嚙入沖擊點而采取的反轉法中主動輪和被動輪的反轉角;ω1為主動輪角速度;δ為單對齒輪副輪齒受載后的綜合變形量,其考慮了齒面修形的影響;ra1為主動輪齒頂圓半徑;ra2為從動輪齒頂圓半徑;r1為主動輪節圓半徑;r2為從動輪節圓半徑;rb1為主動輪基圓半徑;rb2為從動輪基圓半徑;α為分度圓壓力角;a為齒輪中心距;i為傳動比。
由上可準確獲取的內嚙合齒輪副嚙入沖擊位置點,進一步構建了求解內嚙合嚙入沖擊速度模型(如圖11(b)所示),具體構建方法如下
(10)
其中,
(11)
(12)
沖擊速度
(13)
其中,
(14)
(15)
至此,依據嚙入沖擊速度、嚙入沖擊點位置、輪齒的質量和慣性等可構建內嚙合齒輪副的嚙入沖擊動力學模型,如圖12所示。

圖12 內嚙合線外嚙入沖擊模型
內嚙合副嚙入齒輪對的轉動慣量為
(16)
再將兩嚙入齒輪的轉動慣量轉化為瞬時嚙合線上的誘導質量

(17)
式中:J1和J2分別為主動輪及從動輪的瞬時轉動慣量;b為齒寬;ρ為齒輪材料密度;ra1和ra2分別為兩齒輪齒頂圓半徑。
齒輪副嚙入沖擊點的沖擊動能為
(18)
由于沖擊作用,使得輪齒之間產生沖擊變形量δs,與相對應的沖擊力Fs則為最大沖擊力。根據沖擊力學理論,沖擊動能Ek、最大變形δs以及最大沖擊力Fs之間有如下關系

(19)
式中:qs為嚙入輪齒在線外初始嚙入點D處的單齒對柔度[22],這里利用單齒嚙入剛度插值來獲得;qp為嚙入時刻除沖擊齒對外,其他嚙合齒對的綜合柔度。
最終得到內嚙合初始嚙入沖擊點的嚙入沖擊力表達式
(20)
通過所構建的內嚙合齒輪副線外嚙入沖擊分析模型,可準確獲得內嚙合齒輪副的嚙入沖擊力情況,計算嚙合周期下嚙入沖擊力及嚙入沖擊位置,從而為對比驗證試驗提取行星傳動系統嚙入沖擊提供重要的理論支持。
3.2 全有限元驗證模型
此外,為更加準確地驗證行星傳動系統嚙入沖擊提取技術的有效性。通過將偏心誤差與安裝誤差轉化到嚙合線方向(誤差設置如表3所示,誤差依據《實用齒輪設計計算手冊》中航空齒輪5級精度要求設置),經等效為齒面修形量后與理論齒面疊加,進而模擬真實齒面,從而構建可計入真實誤差的行星傳動系統參數化有限元模型(模型如圖13所示),并依據文獻[23]設置與分析(文獻結果如圖14所示),獲取了不同轉速下的行星傳動系統內嚙合副嚙入沖擊情況。所獲分析結果如表4所示。

(a)

圖14 嚙入沖擊有限元分析應力云圖
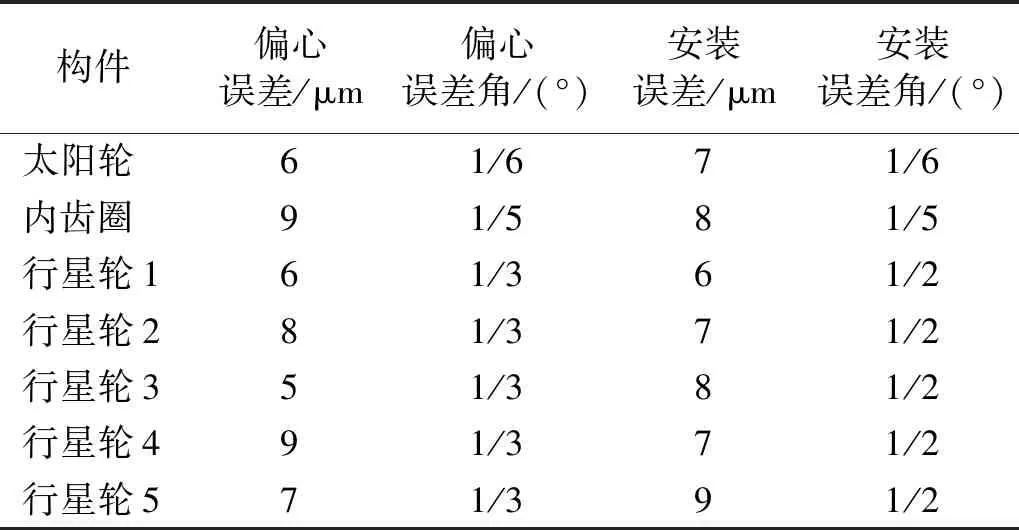
表3 各構件誤差設置

表4 試驗與理論及有限元的嚙入沖擊力分析結果對比
3.3 試驗與模型結果對比
不同轉速下嚙入沖擊力的理論計算結果、有限元分析結果與試驗測試結果的對比情況,如表4所示。經對比可知,試驗所得結果要大于理論結果和有限元分析結果,這是由于試驗結果受到更多外界因素影響,但三者所獲嚙入沖擊的趨勢及規律性是完全一致的。通過試驗方法獲取嚙入沖擊信號在為嚙入沖擊理論模型提供驗證的同時,也為分辨復雜傳動系統的性能提供了一種更加簡便的方法。此外,也為齒輪傳動的修形和減振降噪設計的效果驗證提供了一種方法。
4 結 論
針對現有圍繞嚙入沖擊分析多為理論分析手段且圍繞單對齒輪副,未能涉及傳動系統嚙入沖擊的現狀,同時考慮到傳動系統制造誤差、安裝誤差等的隨機性以及嚙入沖擊的非線性特點,通過理論手段構建精確地系統嚙入沖擊數學解析模型亦將是難以完成的任務。為此,本文結合試驗,首先通過采用粘貼于內齒圈齒根的應變片電橋,方便、實用、高精度的測得行星傳動系統各支路齒面載荷,隨后借助希爾伯特黃變換、小波降噪及瞬時頻率理論成功分離提取出行星傳動系統各支路嚙入沖擊信號,并與有限元模型和理論模型結果對比后得以驗證。本文所提試驗方法避免了復雜系統嚙入沖擊數學解析模型的構建過程,并可準確判定運行過程中存在嚙入沖擊的輪齒,可為實時修形設計以及復雜傳動系統的動態性能評測提供依據。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
