OCT內(nèi)窺鏡驅(qū)動(dòng)控制用微型壓電馬達(dá)的機(jī)電耦合動(dòng)力學(xué)特性研究
2023-11-14 05:30:30劉周龍朱強(qiáng)國鄭友成王光慶
振動(dòng)與沖擊 2023年21期
關(guān)鍵詞:振動(dòng)
劉周龍,周 鑠,朱強(qiáng)國,鄭友成,王光慶
(浙江工商大學(xué) 信息與電子工程學(xué)院(薩塞克斯人工智能學(xué)院),杭州 310018)
光學(xué)相干成像技術(shù)(optical coherence tomography,OCT)是一種新型的成像檢測技術(shù),廣泛應(yīng)用于胃腸道、血管、眼科、皮膚以及腎臟等器官的檢測,是光學(xué)醫(yī)學(xué)影像研究的前沿和熱點(diǎn)[1]。通常,OCT內(nèi)窺鏡前端反射鏡的旋轉(zhuǎn)運(yùn)動(dòng)是由微型電磁型馬達(dá)驅(qū)動(dòng)實(shí)現(xiàn)的。電磁型馬達(dá)具有轉(zhuǎn)速高等優(yōu)點(diǎn),但其輸出力矩小、可控性低、低速需要減速結(jié)構(gòu),導(dǎo)致結(jié)構(gòu)設(shè)計(jì)難度和復(fù)雜度都增大。
壓電馬達(dá)是利用壓電陶瓷(piezoelectric,PZT)的逆壓電效應(yīng)將外界輸入的電能轉(zhuǎn)換為超聲頻域的振動(dòng)能,并通過定子與轉(zhuǎn)子間的摩擦耦合推動(dòng)轉(zhuǎn)子實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng)[2]。與電磁型馬達(dá)相比,壓電馬達(dá)具有低速大力矩、結(jié)構(gòu)設(shè)計(jì)靈活簡單、控制精度高以及無電磁干擾等優(yōu)點(diǎn),非常適用于OCT內(nèi)窺鏡的驅(qū)動(dòng)控制[3]。
OCT內(nèi)窺鏡驅(qū)動(dòng)馬達(dá)受空間尺寸限制,壓電馬達(dá)通常只有1 mm左右大小,設(shè)計(jì)難度非常大;此外,壓電馬達(dá)是復(fù)雜的機(jī)電耦合的動(dòng)力學(xué)系統(tǒng),涉及壓電陶瓷與定子之間的力-電耦合、定子和轉(zhuǎn)子之間的摩擦耦合、以及轉(zhuǎn)子與負(fù)載之間的力耦合等等。為了有效設(shè)計(jì)微型壓電馬達(dá),有必要建立精確的壓電馬達(dá)整體機(jī)電耦合動(dòng)力學(xué)模型,該模型建立得越精確,對壓電馬達(dá)的性能預(yù)估越準(zhǔn)確,壓電馬達(dá)也會(huì)設(shè)計(jì)得越好[4-5]。當(dāng)前,對壓電馬達(dá)動(dòng)力學(xué)分析方法主要有:等效電路法[6-7]、有限元[8]和解析方法[9]等。等效電路法在馬達(dá)設(shè)計(jì)和結(jié)構(gòu)優(yōu)化過程中無法實(shí)時(shí)調(diào)整馬達(dá)參數(shù);有限元方法運(yùn)算量太大、耗時(shí)長[10]。
本文針對OCT內(nèi)窺鏡驅(qū)動(dòng)與控制技術(shù)要求,同時(shí)考慮結(jié)構(gòu)空間尺寸的局限性,利用有限元分析方法設(shè)計(jì)了直徑1 mm長度5 mm的一體化壓電微馬達(dá)。首先利用鐵木辛柯梁方法求出定子的振動(dòng)模態(tài),然后利用Hamiltion變分原理[11],建立能量轉(zhuǎn)換過程,結(jié)合定轉(zhuǎn)子之間的接觸模型和轉(zhuǎn)子力矩平衡原理,得到微型壓電馬達(dá)的機(jī)電耦合動(dòng)力學(xué)模型,仿真分析了壓電馬達(dá)的力矩-轉(zhuǎn)速、力矩-功率和負(fù)載特性等。
1 壓電馬達(dá)定子彎曲振動(dòng)模式
設(shè)計(jì)開發(fā)直徑1 mm長度5 mm的圓柱微型壓電馬達(dá),其包含一種新型定子結(jié)構(gòu)——一體化定子。
一體化定子結(jié)構(gòu)如圖1所示,主要包括金屬圓柱、兩片PZT、金屬帽、輸出軸以及磁性金屬底座。直徑1 mm,高5 mm的金屬圓柱在加工時(shí)會(huì)提前切割兩個(gè)正交的切面,用于粘貼陶瓷片;兩片PZT的尺寸為5.00 mm×0.60 mm×0.15 mm、且極化特性完全相同,采用正交90°粘貼在金屬圓柱的切割面上,其表面通過點(diǎn)焊方法分別連接兩個(gè)正交的高頻外部激勵(lì)電壓(sinωt和cosωt);壓電馬達(dá)定子固定在磁性金屬底座上,形成下端固支,上端自由的梁模型。當(dāng)兩相正交的高頻激勵(lì)電壓以相同的幅值和頻率加載在兩壓電陶瓷片上,壓電片在電場的作用下發(fā)生正交彎曲振動(dòng),從而使金屬柱狀定子表面形成行波[12],并通過定、轉(zhuǎn)子之間的摩擦力驅(qū)動(dòng)轉(zhuǎn)子進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)。

圖1 金屬柱狀一體化定子結(jié)構(gòu)示意圖
為確定壓電馬達(dá)一體化定子的振動(dòng)模式,把微型馬達(dá)定子看作一端夾持固定一端自由的懸臂梁模型。
假設(shè)PZT的應(yīng)力-應(yīng)變滿足胡克定律和線性關(guān)系。因此懸臂梁在單相正弦激勵(lì)(例如A相)單獨(dú)作用時(shí)產(chǎn)生的彎矩可以表示為
Mz(t)=μVapp(t)=μVampsinωt
(1)
式中:Mz(t)為在電壓Vapp(t)激勵(lì)下引起均勻分布的彎矩[13];Vapp(t)為壓電陶瓷片的激勵(lì)電壓,幅值為Vamp(t),電壓頻率為ω;μ為比例系數(shù),與壓電馬達(dá)的材料特性和結(jié)構(gòu)尺寸有關(guān),即
(2)
式中參數(shù)物理意義及取值詳如表1所示。

表1 μ的參數(shù)值
根據(jù)鐵木辛柯梁振動(dòng)理論[14],懸臂梁中任意一點(diǎn)的振動(dòng)方程可以用繞度y和彎曲斜率ψ來描述,即
(3)
(4)
式中:E為定子材料的彈性模量,GPa;G為定子材料剪切模量,GPa;I為定子橫截面極慣性矩,m4;A為定子橫截面面積,m2;J為轉(zhuǎn)動(dòng)慣量,kg·m2;ρ為定子的密度,kg/m3;k為橫截面的形狀系數(shù)。
假設(shè)
(5)
將式(5)代入式(3)和式(4)中,計(jì)算得到Y(jié)i(x)和Ψi(x)的通解形式,即
Yi(x)=C1coshbiαix+C2sinhbiαix+
C3sinbiβix+C4cosbiβix
(6)
(7)
壓電馬達(dá)的定子為一端固定一端自由的懸臂梁,則梁的充分必要邊界條件為:
固定端
Ψ(0)=0,Y(0)=0
(8)
自由端
(9)
利用通解式(6)、式(7)和梁邊界條件式(8)、式(9)求得式(3)、式(4)的特征解以及第i階振動(dòng)模態(tài)bi。
通過上述條件得到定子梁的第i階模態(tài)變量:橫向位移Yi和彎曲饒度Ψi
Yi(x)=D[coshbiaix-λiτiδisinhbiaix-
cosbiBix+δisinbiBix]
(10)
(11)
式中:D和H為無量剛常數(shù),由懸臂梁的邊界條件決定,橫向位移Yi和彎曲饒度Ψi還滿足以下的振動(dòng)正交條件

(12)
式中,Mj為廣義質(zhì)量。
壓電馬達(dá)在正交諧波電壓激勵(lì)下,使用模態(tài)求和法得到定子的近似響應(yīng),即定子的響應(yīng)形式由其模態(tài)與廣義坐標(biāo)qi(t)的乘積和來表示

(13)
在此過程中定子自由端形成均勻分布的彎矩Mz(t),因此式(3)可替換成
(14)
壓電定子通常工作在第一階彎曲振動(dòng)模式下,因此取第1階模態(tài)進(jìn)行計(jì)算,將式(13)代入式(4)和式(14),考慮到在實(shí)際情況下系統(tǒng)存在黏滯阻尼,則A相單獨(dú)激勵(lì)時(shí)定子運(yùn)動(dòng)方程為
(15)

同理,當(dāng)B相激勵(lì)時(shí)定子的運(yùn)動(dòng)微分方程為
(16)
由式(15)解得
sin(ωt-φ)
(17)

同理當(dāng)施加另一項(xiàng)電壓時(shí),其振動(dòng)幅值相同,位移相差90°。
2 定子質(zhì)點(diǎn)運(yùn)動(dòng)軌跡
假設(shè)微型馬達(dá)定子端面上存在任意一點(diǎn)P(x,y),為方便分析,忽略金屬圓柱的切割面,因此定子俯視圖可看作半徑為r的圓形,如圖2(a)所示,O點(diǎn)為定子軸線與上端面中心的交點(diǎn),θ為方位角,是點(diǎn)P與x軸的偏轉(zhuǎn)角度。
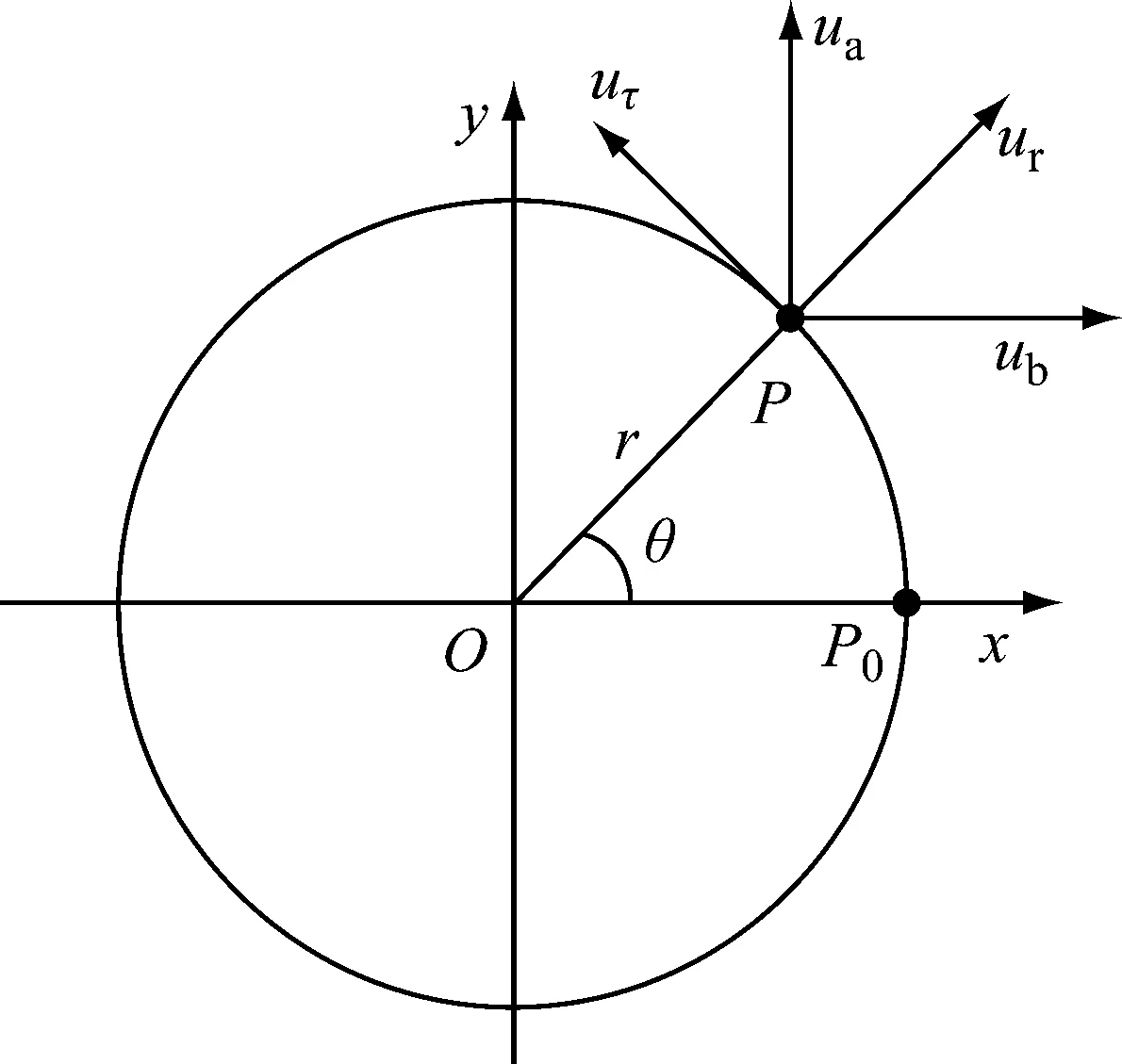
(a) P點(diǎn)俯視示意圖
因此在A,B兩相單獨(dú)激勵(lì)時(shí)定子的橫向位移分別表示為
yL(t)=Y1(t)q1(t)=γsin(ωt)
(18)
yL(t)=Y1(t)q2(t)=γcos(ωt)
(19)

P點(diǎn)在x,y方向的位移偏量ua,ub簡化為
(20)
若A相電壓單獨(dú)激勵(lì)時(shí),定子表面的質(zhì)點(diǎn)會(huì)產(chǎn)生縱向偏移,如圖2(b)所示,縱向位移ωp可通過式(13)、式(17)聯(lián)合求得。定子梁在外界激勵(lì)時(shí),其彎曲饒度ψL(t)為
ψL(t)=Ψ1(t)q1(t)=βsin(ωt)
(21)

當(dāng)A相電壓單獨(dú)激勵(lì)時(shí),其縱向位移為
wpa=-Rβsinθsin(ωt)
(22)
A,B兩相電壓幅值相同,時(shí)間相差90°,則B相的縱向位移為
wpb=-Rβcosθcos(ωt)
(23)
因此當(dāng)A,B兩相同時(shí)激勵(lì)時(shí),定子的縱向位移為兩相之和
wp=wpa+wpb=-Rβcos(ωt-θ)
(24)
從式(24)可以發(fā)現(xiàn)P點(diǎn)在z方向的位移不僅與時(shí)間t有關(guān),還與Ox軸的角度θ有關(guān),位移響應(yīng)呈簡諧波,波數(shù)為1,波長為2πr。由于此波沒有固定的節(jié)點(diǎn)和波腹位置,并且沿著周向旋轉(zhuǎn),因此認(rèn)定為行波。
將圖2(a)中的P點(diǎn)在A,B兩相電壓下的橫向位移ua,ub沿P點(diǎn)的徑向和切向分解,得到P點(diǎn)在徑向和切向的位移ur,uτ,表達(dá)式為
ur=uasin(θ)+ubcos(θ)=γcos(ωt-θ)
(25)
uτ=uacos(θ)-ubsin(θ)=γsin(ωt-θ)
(26)
從式(25)、式(26)中可得出:P點(diǎn)在切向和徑向位移均呈行波方程。
馬達(dá)在運(yùn)行過程中定子表面的質(zhì)點(diǎn)會(huì)發(fā)生偏轉(zhuǎn),如圖3所示,P點(diǎn)為定子靜止時(shí)端面的某一點(diǎn),P0為P點(diǎn)發(fā)生偏轉(zhuǎn)后的位置,P1是P0點(diǎn)在xy平面上的垂足,P1P2⊥PP2。因此定子發(fā)生偏轉(zhuǎn)后P點(diǎn)在xy水平面的偏移量為PP1,其式子為

圖3 P點(diǎn)空間運(yùn)動(dòng)示意圖

(27)
設(shè)過點(diǎn)P的切線方向?yàn)閤1軸,與x1軸垂直,且與PP0在同一平面的為y1軸。當(dāng)馬達(dá)發(fā)生偏轉(zhuǎn)時(shí),在x1Py1平面中P在x1方向的位移偏量為PP2,表達(dá)式為
PP2=-PP1sin(ωt+θ)=-γsin(ωt+θ)
(28)
y1方向上的偏移量為P0P2,要確定其大小需先求出P0P1與P1P2,P0P1為定子偏轉(zhuǎn)時(shí)質(zhì)點(diǎn)的縱向位移wp,表示為
P0P1=|wp|=-Rβcos(ωt+θ)
(29)
P1P2=PP1cos(ωt+θ)=γcos(ωt+θ)
(30)
P0P2為
(31)
由式(28)和式(31)可以得出定子發(fā)生偏轉(zhuǎn)時(shí)質(zhì)點(diǎn)的運(yùn)動(dòng)軌跡
(32)
由式(32)可知,A,B兩相同時(shí)輸入幅值相同,相位差為90°的激勵(lì)電壓時(shí),定子表面質(zhì)點(diǎn)的運(yùn)動(dòng)軌跡為橢圓,符合微型壓電馬達(dá)的設(shè)計(jì)要求。
3 微型壓電馬達(dá)動(dòng)力學(xué)模型
3.1 定轉(zhuǎn)子接觸模型
微型壓電馬達(dá)在工作時(shí),定子表面質(zhì)點(diǎn)會(huì)做橢圓運(yùn)動(dòng),而定轉(zhuǎn)子摩擦接觸產(chǎn)生的摩擦力會(huì)驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。對于轉(zhuǎn)子的運(yùn)動(dòng)問題,需重點(diǎn)考慮垂直方向運(yùn)動(dòng)和繞軸旋轉(zhuǎn)運(yùn)動(dòng)。根據(jù)牛頓運(yùn)動(dòng)定律[15],轉(zhuǎn)子在垂直方向的力平衡關(guān)系可以得到運(yùn)動(dòng)方程

(33)

在繞軸運(yùn)動(dòng)時(shí),根據(jù)力矩平衡關(guān)系可以得到其旋轉(zhuǎn)運(yùn)動(dòng)方程
(34)

定轉(zhuǎn)子在接觸過程中,定子與轉(zhuǎn)子表面會(huì)發(fā)生力的相互作用,如圖4所示。x軸為定子靜止時(shí)的初始表面,曲線為定子在外界激勵(lì)時(shí)產(chǎn)生的行波波形,定子的行波方向?yàn)閤軸的正向,轉(zhuǎn)子的運(yùn)動(dòng)方向與定子方向相反,即x軸的負(fù)向。
圖4 定轉(zhuǎn)子的接觸界面
假設(shè)微型壓電馬達(dá)的定子與轉(zhuǎn)子之間互相緊貼,則定子對轉(zhuǎn)子的壓縮量g可等價(jià)定子的縱向位移wp,壓縮量g與振動(dòng)位移q1,q2的關(guān)系式為
g=-Rψ1(t)[q1(t)sinθ+q2(t)cosθ]
(35)
把轉(zhuǎn)子在接觸面上的作用力分解為z相的接觸壓力fn和水平平面上的摩擦力fd。z向接觸力與摩擦層的形變量成正比,摩擦力與fn滿足庫倫定律,即
(36)
式中:kn為接觸點(diǎn)摩擦層等效的剛度系數(shù);μd為定轉(zhuǎn)子摩擦界面的滑動(dòng)摩擦因數(shù)。
對式(36)的第一個(gè)式子積分得到
Fint=?sfndS=?kngrdrdθ
(37)
同理,式(34)中的MTint可以表示為
MTint=?sγθfθrdS=?γθμdkngcos(α)r2drdθ
(38)
式中:γθ為符號函數(shù),由轉(zhuǎn)子速度決定;r為轉(zhuǎn)子半徑;fθ,fr分別為fd在切向和徑向的分量,即

(39)
式中,α為摩擦角,主要由定子和轉(zhuǎn)子的相對速度決定
(40)
式中:Vr和Vθ為定子在運(yùn)行過程中某點(diǎn)在徑向和圓周切向的速度;Vτ為轉(zhuǎn)子在該點(diǎn)的周向速度,可通過轉(zhuǎn)子的半徑乘以其角速度得到。
3.2 接觸面能量損失和輸出效率
馬達(dá)在接觸界面產(chǎn)生的摩擦損耗功率Pdc可以分為徑向滑動(dòng)[16]和周向[17]滑動(dòng)引起的損耗Pdr,Pdθ。
Pdc=Pdr+Pdθ
(41)
其中
(42)
(43)
式中:t為定轉(zhuǎn)子接觸系統(tǒng)達(dá)到穩(wěn)定狀態(tài)時(shí)的某個(gè)時(shí)間點(diǎn);T為對壓電陶瓷片施加激勵(lì)電壓的周期。
令定、轉(zhuǎn)子接觸界面在運(yùn)行過程中一個(gè)周期的能量傳遞效率為η,即
(44)
式中,Pout為馬達(dá)的輸出功率,其值為
(45)

3.3 機(jī)電耦合模型及其性能仿真
當(dāng)馬達(dá)的A,B兩相同時(shí)輸入激勵(lì)電壓,兩相電壓分別代入式(15)和式(16),再結(jié)合式子(33)、式(34),可推導(dǎo)出能同時(shí)描述定子和轉(zhuǎn)子動(dòng)力學(xué)行為的機(jī)電耦合模型,其表達(dá)式為

(46)
式中的wp可以用式(35)替換,得到轉(zhuǎn)矩、角速度與振動(dòng)幅值的關(guān)系。
通過式(46)對微型壓電馬達(dá)的輸出特性進(jìn)行仿真,仿真參數(shù)如表2所示。

表2 馬達(dá)仿真參數(shù)
將仿真參數(shù)代入式(46)的一、二式中,可得到懸臂梁在單相激勵(lì)下的振動(dòng)位移。圖5(a)與圖5(b)分別是定子空載時(shí)A,B兩相電壓單獨(dú)激勵(lì)時(shí)的振動(dòng)幅值,其激勵(lì)電壓30 V,電壓頻率21 kHz。由于激勵(lì)電壓的頻率較大,所以振動(dòng)幅值的周期就越小,間距越密。從圖5中可以發(fā)現(xiàn)q1,q2的振動(dòng)幅值隨著時(shí)間的增大而增大,在0.4 s時(shí)定子的振動(dòng)幅值趨于穩(wěn)定,即馬達(dá)達(dá)到穩(wěn)定狀態(tài),最大振動(dòng)幅值為0.6 μm。圖6為壓電馬達(dá)在穩(wěn)定狀態(tài)時(shí)q1,q2振動(dòng)幅值對比圖,q1與q2的振動(dòng)幅值相同,但q1與q2的位移相位相差90°,與激勵(lì)電壓的時(shí)間相位差相同。

(a) A相電壓單獨(dú)激勵(lì)

圖6 q1與q2振幅對比
當(dāng)馬達(dá)運(yùn)行時(shí),轉(zhuǎn)速是不可忽略的輸出特性,影響轉(zhuǎn)速變化的因素有電壓大小、頻率,接觸面的摩擦因素、負(fù)載力矩、預(yù)壓力等。
壓電馬達(dá)的激勵(lì)源為相位相差90°,峰值為30 V,頻率21 kHz的交變電壓。對微型馬達(dá)施加不同的負(fù)載力矩,觀察馬達(dá)在啟動(dòng)過程中轉(zhuǎn)速的變化。如圖8所示,當(dāng)施加不同負(fù)載時(shí),馬達(dá)在穩(wěn)定狀態(tài)時(shí)的最大轉(zhuǎn)速會(huì)發(fā)生變化,負(fù)載越大,轉(zhuǎn)速越小。除此之外,馬達(dá)在空載時(shí)啟動(dòng)是瞬間啟動(dòng),當(dāng)增加負(fù)載時(shí),馬達(dá)的啟動(dòng)有一個(gè)短暫的時(shí)延,且負(fù)載越大,啟動(dòng)時(shí)延越長,如圖7所示,負(fù)載分別為0.5 mN·m和1 mN·m時(shí),啟動(dòng)時(shí)延分別為5 ms和0.04 s。這主要是由于負(fù)載增大,定轉(zhuǎn)子接觸面的初始摩擦力小于負(fù)載的阻力,無法驅(qū)動(dòng)轉(zhuǎn)子運(yùn)行,因此轉(zhuǎn)速在一段時(shí)間內(nèi)為零。當(dāng)摩擦力大于阻力時(shí),轉(zhuǎn)子開始加速旋轉(zhuǎn)。馬達(dá)轉(zhuǎn)速在啟動(dòng)時(shí)加速較快,隨時(shí)間變化其增加趨勢趨于緩慢直至達(dá)到穩(wěn)定狀態(tài)。
圖7 啟動(dòng)時(shí)電機(jī)轉(zhuǎn)速變化
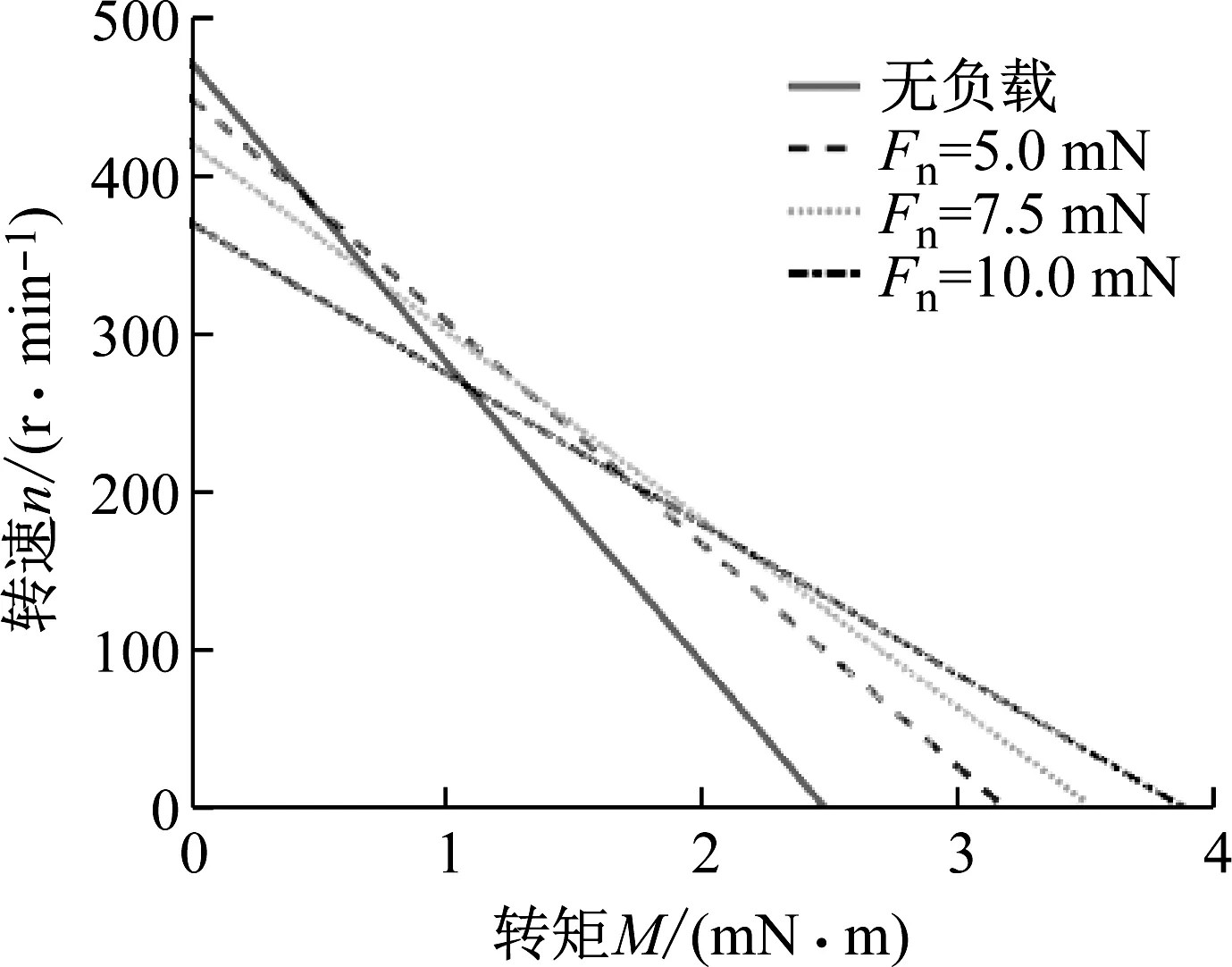
圖8 不同壓力對馬達(dá)轉(zhuǎn)速的影響
改變微型馬達(dá)的預(yù)壓力,其機(jī)械特性的輸出效果也會(huì)產(chǎn)生變化,在試驗(yàn)過程中,主要通過增加轉(zhuǎn)子上方的墊圈數(shù)量改變其預(yù)壓力的大小。如圖8所示,改變預(yù)壓力的大小馬達(dá)的轉(zhuǎn)速與力矩呈線性下降,空載時(shí),轉(zhuǎn)速達(dá)到最大,堵轉(zhuǎn)時(shí),馬達(dá)轉(zhuǎn)速降為零,這種情況下馬達(dá)發(fā)熱嚴(yán)重,容易燒毀馬達(dá)。此外,預(yù)壓力增大,馬達(dá)的空載轉(zhuǎn)速減小,無壓力時(shí),馬達(dá)的空載轉(zhuǎn)速為470 r/min,當(dāng)預(yù)壓力增大到10 mN,空載轉(zhuǎn)速下降到370 r/min;但馬達(dá)的堵轉(zhuǎn)扭矩會(huì)從2.5 mN·m增大到4 mN·m。同時(shí)由于馬達(dá)的預(yù)壓力增大,馬達(dá)的負(fù)載特性曲線由“軟”變“硬”,即馬達(dá)驅(qū)動(dòng)的最大負(fù)載能力逐漸增加。
與傳統(tǒng)馬達(dá)相比,壓電馬達(dá)的輸出功率較小。輸出功率的變化與轉(zhuǎn)矩有關(guān),會(huì)隨著轉(zhuǎn)矩的增大先增加后減小,輸出功率最大值對應(yīng)的轉(zhuǎn)矩為最優(yōu)轉(zhuǎn)矩點(diǎn)。
預(yù)壓力的變化也會(huì)對輸出功率產(chǎn)生影響,如圖9所示。轉(zhuǎn)子的預(yù)壓力增大,其最大輸出功率先增大后減小,即馬達(dá)存在最優(yōu)預(yù)壓力,此時(shí)馬達(dá)輸出功率最大。在預(yù)壓力增大過程中,堵轉(zhuǎn)力矩也會(huì)增大,且最優(yōu)轉(zhuǎn)矩點(diǎn)隨著預(yù)壓力增大往左偏移。當(dāng)預(yù)壓力為7.5 mN時(shí),馬達(dá)的輸出功率達(dá)到最大值38 mW。從式(45)中可以看出,輸出功率的大小取決于輸出轉(zhuǎn)矩與角速度,微型驅(qū)動(dòng)馬達(dá)的輸出轉(zhuǎn)矩在增大的過程中,角速度會(huì)降低,當(dāng)輸出功率達(dá)到最大值之后,馬達(dá)轉(zhuǎn)速下降的趨勢大于輸出轉(zhuǎn)矩增加的趨勢,輸出功率開始降低,當(dāng)速度趨于零時(shí),馬達(dá)的輸出功率為零。

圖9 壓力對輸出功率的影響
馬達(dá)性能的好壞可通過其輸出效率來判斷。當(dāng)壓電馬達(dá)工作時(shí),轉(zhuǎn)子轉(zhuǎn)動(dòng)過程中會(huì)在徑向和周向發(fā)生滑動(dòng)引起損耗,兩者的損耗統(tǒng)稱為摩擦損失的功率,損失的功率會(huì)隨著預(yù)壓力的增大而增大,如圖10所示。其主要原因?yàn)轭A(yù)壓力增大時(shí)定轉(zhuǎn)子的接觸界面增加,另一原因是壓力增大時(shí),在運(yùn)行過程中產(chǎn)熱增加,增加功率損耗[18]。

圖10 不同預(yù)壓力馬達(dá)損失的功率
不同的預(yù)壓力對馬達(dá)輸出效率的影響如圖11所示,其變化趨勢與馬達(dá)的輸出功率趨勢相似。從圖11可以發(fā)現(xiàn),只有預(yù)壓力合適時(shí),馬達(dá)才會(huì)有良好的輸出效果,輸出效率最大值為預(yù)壓力7.5 mN時(shí),其輸出效率為33%。
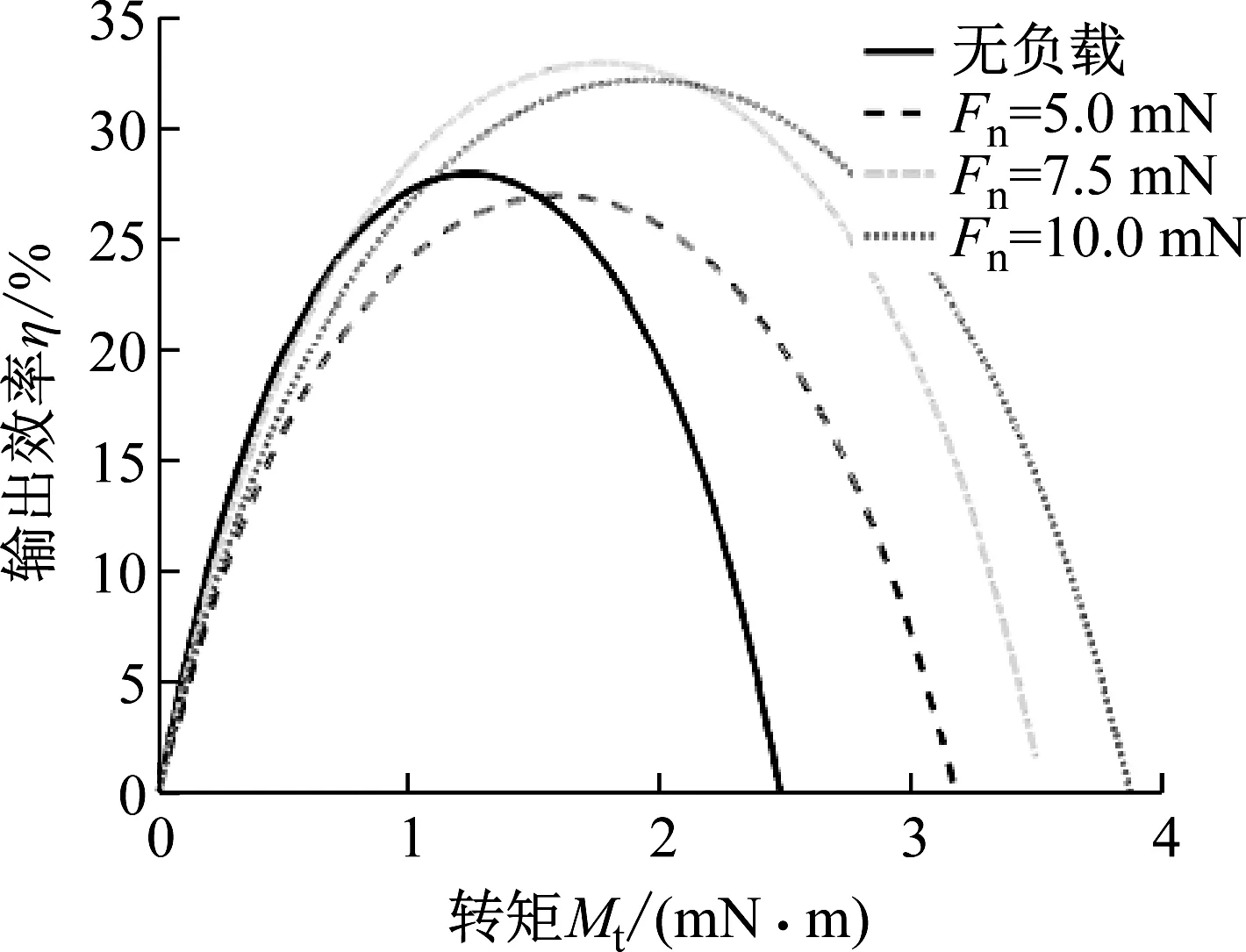
圖11 壓力對輸出功率的影響
4 試驗(yàn)分析
利用兩片PZT和長5 mm、直徑1 mm的金屬圓柱制作微型壓電馬達(dá)樣機(jī),馬達(dá)樣機(jī)包括一體化定子、磁性金屬底座、轉(zhuǎn)子和墊圈,馬達(dá)總長度為7 mm,如圖12所示。
圖12的黃線與綠線一端分別與兩片PZT焊接,另一端分別連接A,B兩相電源,黑線一端連接磁性金屬,一端接地。為方便觀測在轉(zhuǎn)子側(cè)邊粘貼黃色細(xì)紙條,轉(zhuǎn)子上方放置墊圈,可通過改變墊圈的數(shù)量改變預(yù)壓力大小,為方便區(qū)分,圖中的墊圈與轉(zhuǎn)子處于分離狀態(tài)。
首先利用阻抗分析儀,對微型壓電馬達(dá)樣機(jī)的阻抗進(jìn)行測量,圖13為試驗(yàn)測得的壓電馬達(dá)阻抗/頻率曲線,其第一階彎曲振動(dòng)模式諧振頻率約為20.5 kHz,與仿真結(jié)果21 kHz相仿,表明微型壓電馬達(dá)的樣機(jī)符合設(shè)計(jì)要求。
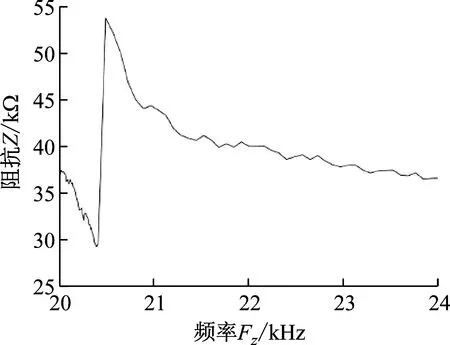
圖13 阻抗試驗(yàn)圖
由于微型壓電馬達(dá)尺寸較小,轉(zhuǎn)速較快,因此無法通過肉眼直接進(jìn)行觀測,需要借助其他設(shè)備輔助測量。
設(shè)計(jì)了一種檢測方法:通過激光位移傳感器來檢測微型壓電馬達(dá)的轉(zhuǎn)速,下位機(jī)傳感器與上位機(jī)電腦相連。試驗(yàn)過程,壓電馬達(dá)的轉(zhuǎn)子在旋轉(zhuǎn)過程中,每旋轉(zhuǎn)一周,轉(zhuǎn)子側(cè)邊的紙片就會(huì)經(jīng)過一次激光傳感器發(fā)出的激光信號,由于紙片遮擋激光信號,因此上位機(jī)監(jiān)測的位移數(shù)值會(huì)發(fā)生短暫的改變,只需要統(tǒng)計(jì)激光位移傳感器在1 min內(nèi)位移發(fā)生波動(dòng)的次數(shù),即可確定馬達(dá)的轉(zhuǎn)速。激光位移傳感器的型號為KEYENCE LK-G80,其最小精度為2 ms,在壓電馬達(dá)的轉(zhuǎn)速范圍之內(nèi)。
圖14(a)~圖14(d)為電機(jī)的試驗(yàn)結(jié)果。當(dāng)改變激勵(lì)電壓的頻率,其轉(zhuǎn)速會(huì)發(fā)生變化,且在第一階彎曲振動(dòng)諧振頻率附近時(shí),馬達(dá)的轉(zhuǎn)速較大,激勵(lì)電壓的頻率偏離一階振動(dòng)頻率時(shí),轉(zhuǎn)速減小,見圖14(a)。

(a) 頻率-轉(zhuǎn)速
對壓電陶瓷片輸入不同的激勵(lì)電壓時(shí),在一定范圍內(nèi),馬達(dá)的轉(zhuǎn)速會(huì)隨著電壓的增大而增大,如圖14(b)所示。若在試驗(yàn)過程中輸入的電壓幅值大于PZT所能承受的最大值,則PZT會(huì)被擊穿報(bào)廢。
在試驗(yàn)過程中,增大轉(zhuǎn)子的預(yù)壓力,馬達(dá)的堵轉(zhuǎn)力矩會(huì)發(fā)生變化,堵轉(zhuǎn)力矩通過角加速度法[19]測得。如圖14(c)所示預(yù)壓力增大,堵轉(zhuǎn)力矩增大,相同但其增大的趨勢趨于平緩,當(dāng)預(yù)壓力達(dá)到臨界點(diǎn)時(shí),馬達(dá)則會(huì)無法啟動(dòng)。
試驗(yàn)測得預(yù)壓力增大過程中,馬達(dá)空載狀態(tài)下的轉(zhuǎn)速會(huì)減小,見圖14(d)。試驗(yàn)結(jié)果低于仿真結(jié)果,但總體趨勢一致,主要原因是外界轉(zhuǎn)子與定子之間存在摩擦,以及其他外界因素對試驗(yàn)造成誤差。
5 結(jié) 論
本文首先利用鐵木辛柯梁模型計(jì)算得出長度為5 mm,直徑為1 mm的微型壓電馬達(dá)的定子的振動(dòng)幅值響應(yīng),結(jié)合Hamilton能量變分原理建立馬達(dá)的機(jī)電耦合模型。通過MATLAB軟件計(jì)算馬達(dá)的輸出特性,考慮不同影響因素對馬達(dá)輸出特性的影響,在一定范圍內(nèi)改變預(yù)壓力大小后對馬達(dá)進(jìn)行仿真。
仿真得出:馬達(dá)的轉(zhuǎn)速隨著負(fù)載轉(zhuǎn)矩的增加,轉(zhuǎn)速降低;當(dāng)馬達(dá)在有負(fù)載的情況下,馬達(dá)的啟動(dòng)速度會(huì)減慢,但達(dá)到穩(wěn)定狀態(tài)速度一致;預(yù)壓力會(huì)改變馬達(dá)的輸出特性,且存在一個(gè)最優(yōu)點(diǎn)。仿真結(jié)果滿足馬達(dá)的制作要求,為微型驅(qū)動(dòng)馬達(dá)的制作及進(jìn)一步研發(fā)和性能優(yōu)化提供了基礎(chǔ)。不足之處:在仿真馬達(dá)的輸出特性時(shí),在轉(zhuǎn)矩或預(yù)壓力增大過程中無法考慮馬達(dá)溫度升高對其的影響。
試驗(yàn)結(jié)果表明:激勵(lì)電壓的幅值增加,馬達(dá)轉(zhuǎn)速增大;電壓的頻率在一階模態(tài)頻率附近,其轉(zhuǎn)速較大;預(yù)壓力增大,馬達(dá)的最大空載轉(zhuǎn)速會(huì)降低,但馬達(dá)的堵轉(zhuǎn)力矩會(huì)增大,試驗(yàn)結(jié)果與仿真的誤差在允許范圍內(nèi)。
1 mm微型壓電馬達(dá)的一體化定子由于尺寸微小,加工制作時(shí)在精確度上會(huì)比較困難,但其設(shè)計(jì)結(jié)構(gòu)易于馬達(dá)的安裝。在試驗(yàn)結(jié)果與仿真存在一絲誤差,誤差的可能原因?yàn)橥饨缒Σ恋囊蛩匾约皹訖C(jī)的尺寸精度,在后續(xù)工作中會(huì)繼續(xù)提高精度,減少試驗(yàn)誤差。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
