基于工作特征的電動叉車能量聯合回收方法研究
2023-12-04 05:32:12楊恒李嚴董青郭文孝王震
機床與液壓 2023年21期
關鍵詞:系統
楊恒,李嚴,2,董青,郭文孝,王震
(1.太原科技大學機械工程學院,山西太原 030024;2.山西太鋼不銹鋼股份有限公司硅鋼事業部,山西太原 030003;3.中國煤炭科工集團太原研究院有限公司,山西太原 030006)
0 前言
新一代信息技術與制造業的深度融合推動著制造業的優化升級、降本減負,力爭實現高端化、智能化、綠色化。尤其是“雙碳”戰略目標的提出,進一步為制造業的轉型添加了催化劑。叉車作為一種常見物流搬運設備,也隨著制造業的進化向著智能、綠色、高效等方向發展,市場直接表現為電動叉車的銷售占比逐年提高。據統計,2021年全國叉車銷量突破100萬輛,與2020年相比增長約37%,其中電動叉車銷量占比高達60%。這一趨勢的出現,究其原因主要是相較于內燃叉車,電動叉車除了綠色、環保的優點外,更在于智能化的便利實現和能量的高效利用,特別是針對能量回收和再利用,電動叉車具有先天優勢,并已成為行業研究熱點和企業宣傳亮點。
叉車能量回收主要針對門架系統下降釋放的重力勢能和驅動系統制動過程中產生的制動能開展研究。傳統叉車主要以熱能的方式消耗在各個液壓元器件和制動器件上,不僅損失了大量可再生能量,而且也使整個叉車系統出現發熱、振動、壽命降低的問題,大大縮短了叉車工作壽命[1-2]。而電動叉車理論上通過調整驅動電機運行狀態,并結合電氣控制系統和儲能裝置即可實現能量回收,相關研究也集中于此。文獻[3]提出一種基于發電機和蓄電池的電動叉車勢能回收系統,利用AMESim進行勢能回收效率仿真分析,確立勢能回收的可行性;文獻[4-5]對電動叉車的能耗進行了分析并提出一種用蓄能器作為叉車升降系統能量回收裝置的能量回收方法。文獻[6-8]研究了不同電機和儲能元件對回收效率的影響,分析了不同下降速度對勢能回收效率的影響。文獻[9]用滾珠絲杠裝置代替升降液壓缸的方法,升降系統直接用電機驅動,仿真結果表明其勢能回收能量效果良好。
上述研究大多針對單一的勢能的回收和利用,采用的儲能裝置主要是蓄能器或蓄電池。而實際工作過程中,叉車門架升降、運行起制動和搬運距離具有聯動、頻繁、短時等的特點,能量轉化較快。因此,現有研究與叉車的實際工作特征并不相符。針對這一問題,本文作者首先分析總結了叉車的工作特征,基于此,提出一種基于工作特征的電動叉車勢能及制動能的能量聯合回收方法;然后利用AMESim/Simulink軟件建立聯合勢能回收與制動能回收系統的仿真模型,最后以某倉庫電動叉車為例,利用聯合回收方法和仿真模型對典型工作循環進行能量回收,驗證了提出方法的有效性,并評價了綜合節能效果。
1 叉車工作特征及能量分析
1.1 叉車的典型工作循環
在電動叉車工作過程中,門架系統通過貨叉完成貨物起升、下降動作,驅動系統負責前進、后退。在整個工作過程中兩者聯動協調,提高叉車工作效率。通過對叉車工作過程的總結分析,一個典型工作循環主要包括叉貨、行走搬運、堆貨等工況,具體表示為:空載行駛到取貨點→空載起升貨叉→前進叉貨→叉貨后退→重載下降→重載后退→重載前進→起升貨物→前進放貨→后退抽叉→空載下降貨叉→空載后退→空載前進到取貨點[10],如圖1所示。在典型工作循環中可以發現,貨物叉取和堆放門架系統存在勢能轉換,貨物的搬運驅動系統存在動能轉換。
1.2 電動叉車工作過程中的能量回收分析
叉車工作看似簡單實則涉及的零部件眾多,微動復雜。為了便于研究叉車能量回收,忽略油缸傾斜和轉向的能量損耗及貨叉的微調動作。叉車工作過程中的勢能和制動能分析如下。
1.2.1 門架系統的勢能回收分析
貨物下降過程中可回收的最大勢能為Epmax:
Epmax=mgHiηs
(1)
式中:Epmax為最大可回收的勢能,J;Hi為最大舉升高度,m;ηs為勢能回收的總效率;g為重力加速度,m/s2。
m=m0+1/2m1+m2+1/2m3
(2)
ηs=ηmeηcηmηgηDCηSC
(3)
式中:m0為負載質量,kg;m1為內門架質量,kg;m2為貨叉架及貨叉質量,kg;m3為升降油缸運動部分質量,kg;ηme為門架系統的機械效率,取0.965;ηc為舉升油缸的效率,取0.91;ηm為液壓馬達的總效率,取0.81;ηg為發電機的效率,取0.9;ηDC為雙向轉換器的傳輸效率,取0.91;ηSC為超級電容的充電效率,取0.9。
發電機功率計算:
P=pqηm
(4)
式中:P為發電機功率,kW;p為馬達壓力,MPa;q為馬達輸出流量,L/min。
1.2.2 驅動系統的制動能回收分析
在車間或倉庫,電動叉車行駛過程中受到多項阻力的作用,其中主要有滾動摩擦阻力,在正常狀態下,叉車受力總和應該是平衡的,所以當叉車勻速行駛時,叉車的總阻力計算公式為
F=Ff
(5)
滾動阻力:
Ff=mgfcosα
(6)
式中:f為滾動阻力系數;m為整車質量,kg;α為路面坡度。
叉車在制動過程中可回收的制動能計算公式:
(7)
式中:m為叉車總質量,kg;vi為叉車減速時的速度,m/s;ηz為制動能回收效率,取0.6。
當電機制動力參加制動時,電機制動力為
Fd=Tmitηt/r
(8)
式中:Tm為電機轉矩,N·m;it為傳動機構傳動比;ηt為傳動效率;r為車輪半徑,mm。
能量回收總公式:
E=Epi+Ezi
(9)
式中:Epi為貨物第i次下降可回收的勢能,J;Ezi為叉車第i次制動可回收的制動能,J。
勢能與制動能轉化為超級電容儲存電能的效率,其計算公式為
ηdr=Esc/E×100%
(10)
式中:Esc為超級電容可儲存的電能,J。
(11)
式中:C為超級電容單體的額定電容,F;U2為充電完成后超級電容電壓,V;U1為充電前超級電容初始電壓,V。
2 基于工作特征的能量聯合回收方法
2.1 儲能裝置的選擇
儲能裝置作為電動叉車能量釋放的起點和回收的終端,是設計能量回收系統中關鍵部件。從叉車工作特征分析,頻繁升降和起制動引起電動叉車能量轉換迅速、瞬時峰值大、沖擊猛烈,因此需要合理選擇能量回收系統的儲能裝置。
現有儲能裝置主要有蓄電池、普通電容和超級電容等。其中蓄電池不僅充電耗時長,比功率低,不能瞬間吸收大量的能量,甚至當電動和發電模式切換,電流波動較大,工作溫度較高,都會對蓄電池壽命產生影響;而普通電容儲存電量較少,充放電次數少,在一定溫度下,電能使用周期會下降,在充電時,效率也會受到影響。
相比之下,超級電容儲能原理與蓄電池相似,但是在儲存回收的能量時,自身可儲存電量大,功率密度高,短時間內可以完成能量的快速存儲和釋放,可提供強大的脈沖功率,超級電容過度充放不會對其壽命構成影響,比普通電容擁有更強的儲電能力,比電池擁有更快的充放電速度,并且儲能過程可逆,更適合短時間內的能量載體和動力來源[11]。基于此,本文作者綜合對比各儲能裝置特點,并結合叉車工作特征,最終采用超級電容作為電動叉車能量回收系統儲能裝置。超級電容充放電曲線如圖2所示。
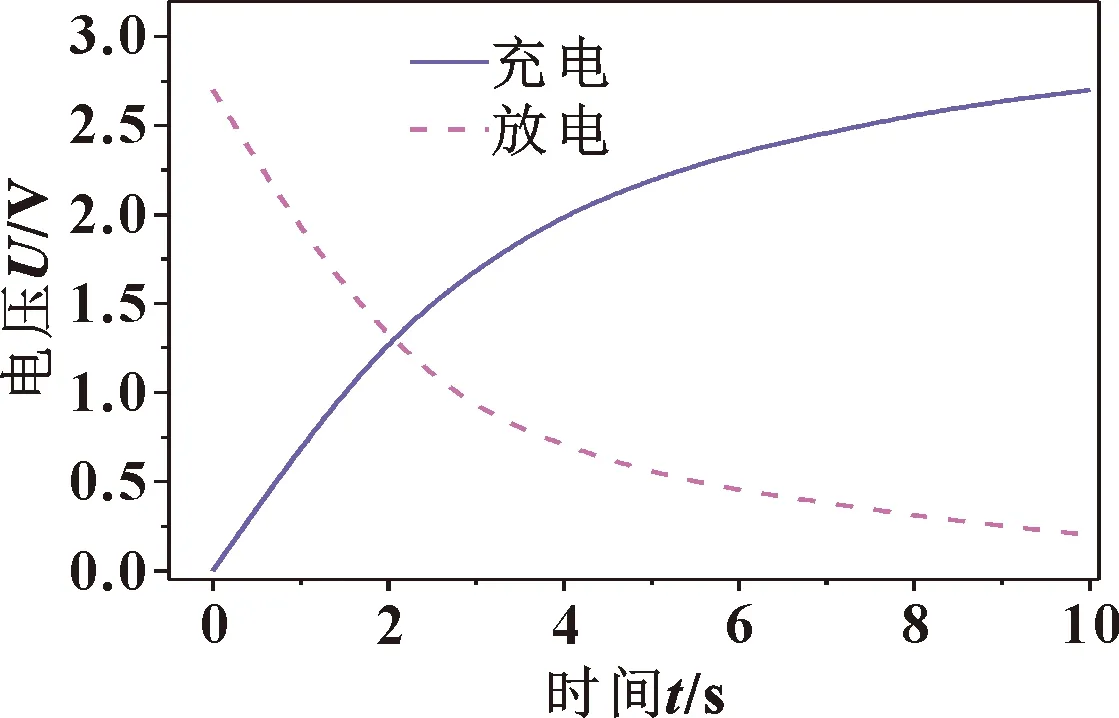
圖2 超級電容充放電曲線Fig.2 Charge discharge curve of super capacitor
2.2 基于工作特征的能量聯合回收方案
傳統叉車的勢能和制動能主要以熱能的方式消耗在各元器件上,不僅浪費了能量,而且增加了叉車各系統發熱。根據電動叉車工作特征,本文作者對原有控制系統加以改進,增加了能量回收模塊、儲能模塊、整車控制器模塊。改進后的能量回收系統方案如圖3所示。

圖3 能量聯合回收系統方案Fig.3 Energy recovery system scheme
勢能回收系統是利用負載及內門架等的重力作用下,貨叉向下運動,同時帶動內門架向下運動;內門架推動升降油缸活塞向下運動,升降油缸桿腔的液壓油被壓出,液壓油通過升降換向閥流向液壓馬達的進油口;此時,液壓馬達開始轉動,發電機被帶動開始發電,發電機發出的電流經DC/DC轉換器穩壓后充入超級電容[12]。
叉車制動能回收是當叉車減速、制動或松開加速踏板時,牽引電動機轉變為發電機發電,并將所產生的電能補送回叉車的儲能裝置中重新加以利用,同時電機產生制動轉矩使叉車制動,即是一個再生制動過程。在制動能量回收過程中,控制系統通過傳感器采集制動踏板力和踏板踩下速度、電池容量信號、車速等信號,并對信號綜合計算和處理,最后得到電機制動力矩和機械制動力矩的大小和分配比例,并傳送給電機控制器和機械控制器,從而實現制動能量回收[13-14]。
2.3 基于模糊PID自適應算法的液壓缸位移控制策略
在勢能回收系統中,電動叉車貨叉的下降通常是閥控系統利用液壓閥的節流口或不同位來控制流量,進而控制液壓缸的位移。而閥控系統具有較強的非線性,會導致液壓缸在升降的時候產生輕微振動,位移曲線不平穩。為了精準控制液壓缸的位移,本文作者采用了模糊PID自適應算法,對勢能回收系統中的液壓缸位移進行精準控制,使液壓缸位移可以按照期望要求運動。
模糊PID自適應算法主要是由模糊控制器和PID控制器結合而成,模糊控制器以誤差e和誤差變化率ec作為輸入,利用模糊規則對PID控制器的參數Kp、Ki、Kd進行自適應整定,使被控對象保持在良好的動、靜態穩定狀態。圖4所示為模糊PID自適應控制原理。其控制率為
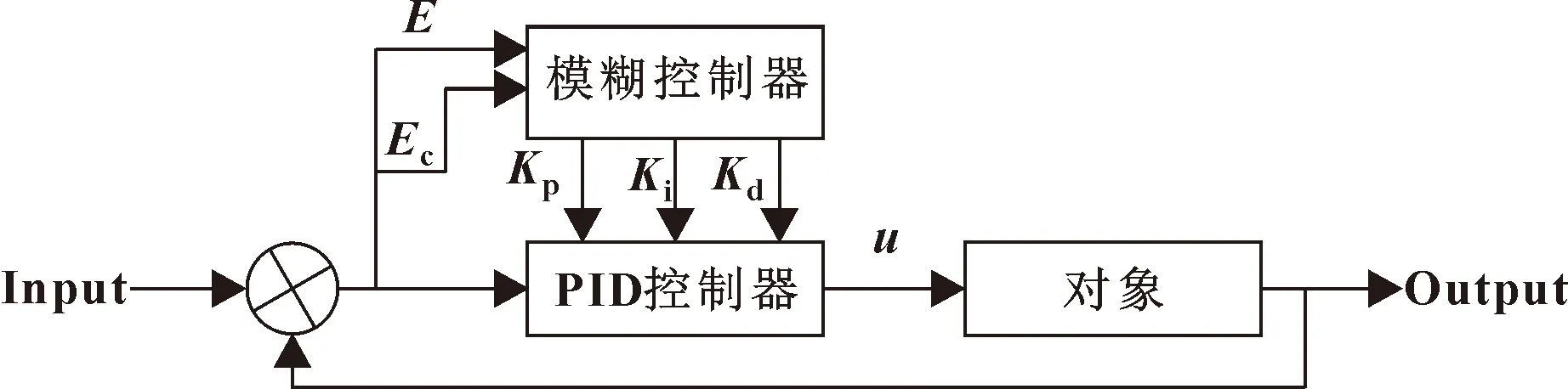
圖4 模糊PID自適應控制原理Fig.4 Principle of fuzzy PID adaptive control
u=(Kp+ΔKp)e(k)+(Ki+ΔKi)
∑e(n)+(Kd+ΔKd)[e(k)-e(k-1)]
(12)
模型中電液位置伺服系統經過常規PID控制和模糊PID自適應控制后,系統的階躍響應曲線如圖5所示,采用常規PID控制時液壓缸位移會有突變的現象,會引起振動從而導致整個液壓系統不能平穩地工作。可見,相比于常規PID控制,模糊自適應PID控制能夠確保系統不受負載干擾的影響,保證系統較好的魯棒性,控制過程更加靈活穩定,特別是對于時變性和非線性較大的被控對象,其優點更加突出,因此采用模糊PID自適應控制對液壓缸位移有更好的控制效果[17]。
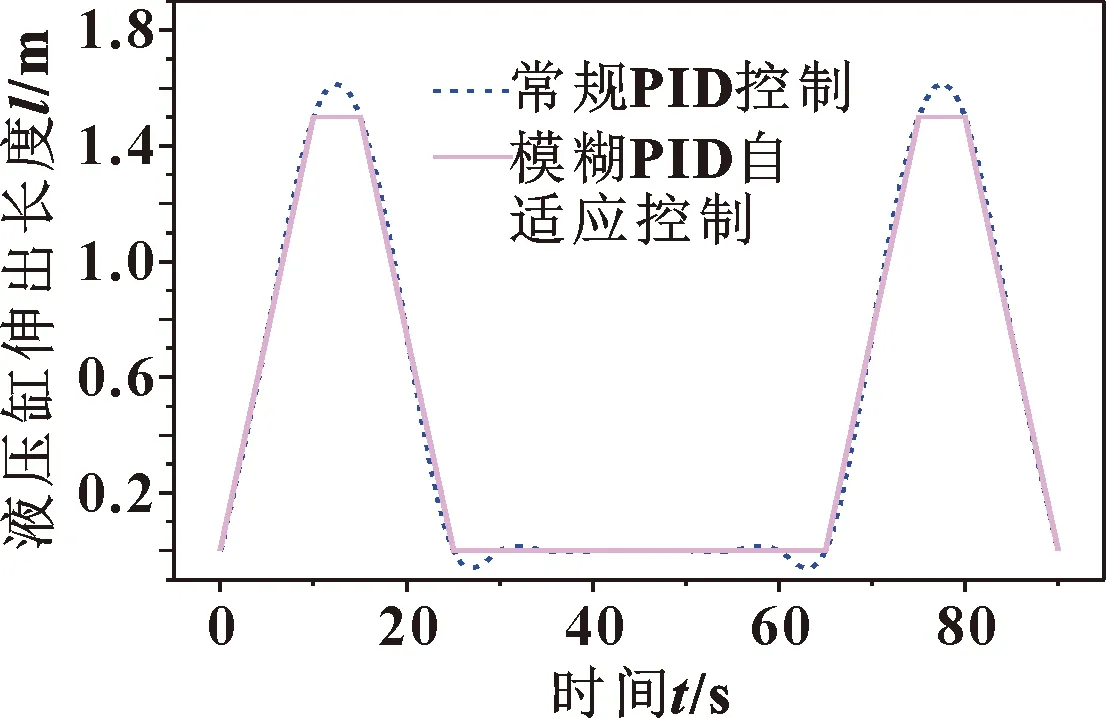
圖5 常規PID和模糊PID自適應控制下的液壓缸位移曲線Fig.5 Displacement curves of hydraulic cylinder under conventional PID and fuzzy PID adaptive control
3 基于工作特征的能量聯合回收仿真模型
針對上述能量聯合回收方案和控制策略,本文作者建立了基于AMESim/Simulink的系統完整聯合仿真模型,對提出的能量回收方案和控制策略進行建模仿真,如圖6所示。該模型整合勢能回收和制動能回收于一體,模擬了叉車整個工作過程的能量回收,并分析了超級電容SOC(Stage of Charge)的變化,獲得系統回收效率。

圖6 能量回收系統聯合仿真模型Fig.6 Joint simulation model of energy recovery system
仿真模型建立在常溫條件下,忽略了溫度對電機、超級電容的影響。在能量聯合回收仿真模型架構時,依據電動叉車的工作特征,系統仿真模型由勢能回收系統、制動能回收系統和控制系統組成。其中,勢能回收系統主要模擬電動叉車貨叉兩次升降過程,并且利用Simulink建立了電液位置伺服系統模糊PID自適應控制系統對液壓缸位移進行精準控制,對液壓缸有桿腔與無桿腔壓力進行監控。模型忽略了門架之間的摩擦,并且將門架、貨叉、重物三者統一。電動叉車第一次勢能回收把機械能轉化為電能后儲存到超級電容中,為后續工作提供能量,勢能回收仿真系統完成了對貨叉升降的勢能回收再利用。
制動能回收系統通過對AMESim中縱向驅動器進行定義,控制電動叉車按照實際工況行走啟停,把實際速度曲線數據導入AMESim中,模擬了電動叉車短距離行駛情況。叉車的控制單元接收來自駕駛員、超級電容和電機的信息并對它們進行分析,以最大限度地減少電能的消耗。當駕駛員剎車時,電動機可以作為發電機給超級電容充電,然后完成制動能量回收再利用。
在Simulink中建立的電液位置伺服控制系統主要包含以下幾部分:目標輸入模塊、控制模塊、聯合仿真模塊、顯示模塊。目標輸入模塊主要包括階躍、方波的信號輸入;控制模塊主要是模糊PID控制器;利用AMESim對Simulink的接口技術,把兩個優秀的專業仿真工具結合起來,不僅發揮了AMESim突出的復雜系統建模能力,而且借助MATLAB/Simulink強大的數值處理能力,取得完美的仿真效果。其中聯合仿真模塊是利用AMESim的Interface模塊將液壓伺服系統以非線性被控對象的形式輸入Simulink中,并以S函數形式表示,S函數的調用語法可以與AMESim中的求解器進行交互。再將Simulink中的控制算法模型連接到AMESim中的 Controller內,修改文件名和設置系統參數,這樣通過MATLAB中的S函數實現了AMESim和MATLAB的無縫銜接。模糊PID控制算法通過S函數和Simulink 結合的方式實現[15-16],并作為一個子模塊參與聯合仿真系統的構建。顯示模塊為示波器。電液位置伺服控制系統如圖7所示。
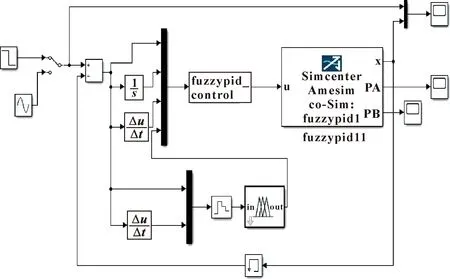
圖7 電液位置伺服控制系統Fig.7 Electro hydraulic position servo control system
4 實例分析
以某倉庫1 t電動叉車的一個典型工作循環為例(門架升高2次,下降2次,行車制動7次回到起點),利用提出的能量聯合回收方法和系統仿真模型進行全流程能量回收分析,并與理論計算進行對比。仿真參數如表1所示。
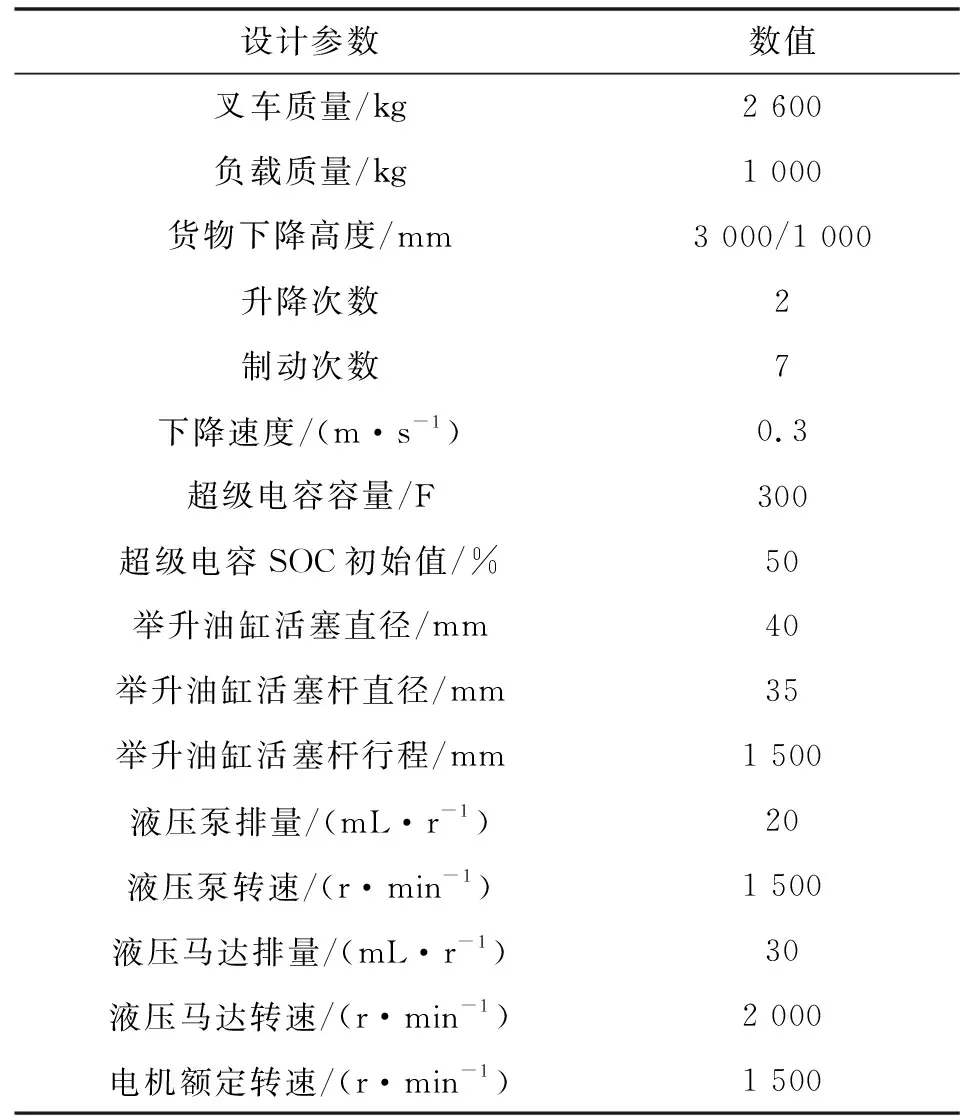
表1 仿真參數Tab.1 Simulation parameters
4.1 仿真過程
仿真時,電動叉車按設計的舉升油缸位移曲線進行升降:在5~15 s內,電動叉車處于舉升工作階段,液壓系統處于消耗能量;從20 s開始,舉升油缸下降,無桿腔內的液壓油在重物重力勢能作用下通過換向閥進入液壓馬達,帶動發電機工作,此時發電機產生的電流通過整流器轉化為直流電流,進而對儲能超級電容進充電;在30 s時舉升油缸完全縮回,然后電動叉車開始按預想的行走速度曲線開始行走;在30~75 s內進行制動能量的回收,當叉車到達堆貨區,電動叉車的舉升系統再繼續舉升下降一次,然后回到起始點視為整個工況的結束。圖8為舉升油缸的位移,圖9為叉車行駛速度曲線,圖10為貨叉下降一次的液壓馬達流量轉速。
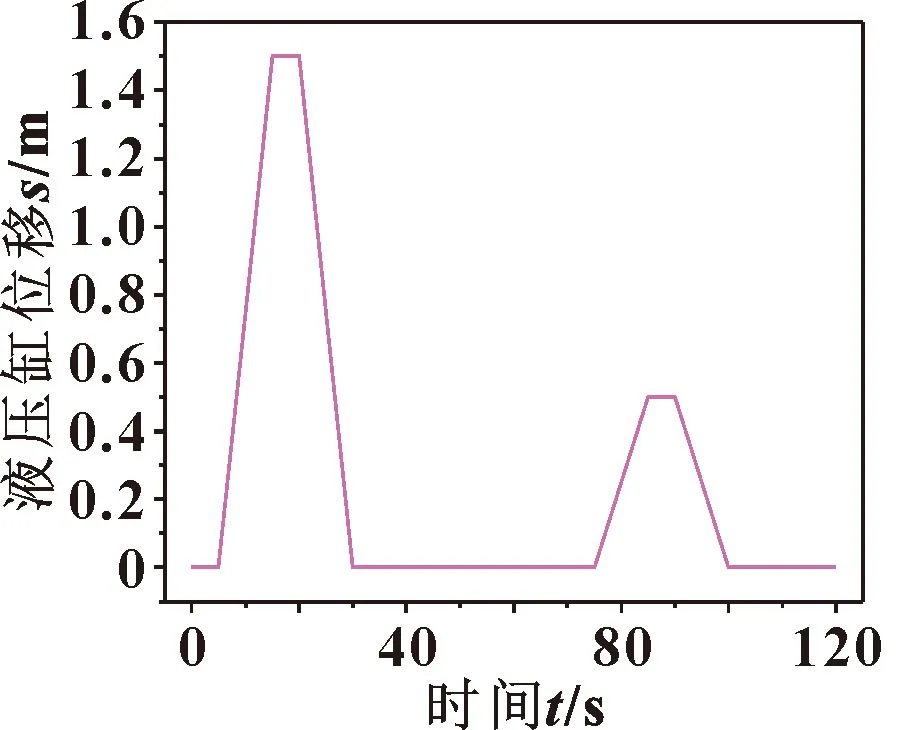
圖8 舉升油缸位移Fig.8 Lift cylinder displacement
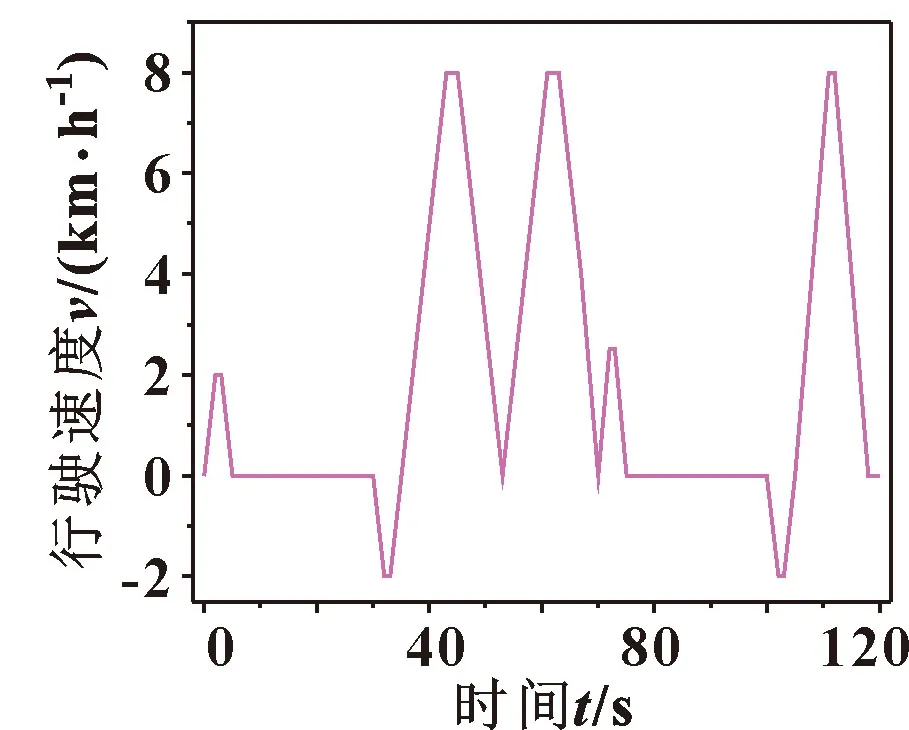
圖9 叉車行駛速度曲線Fig.9 Forklift traveling speed curve
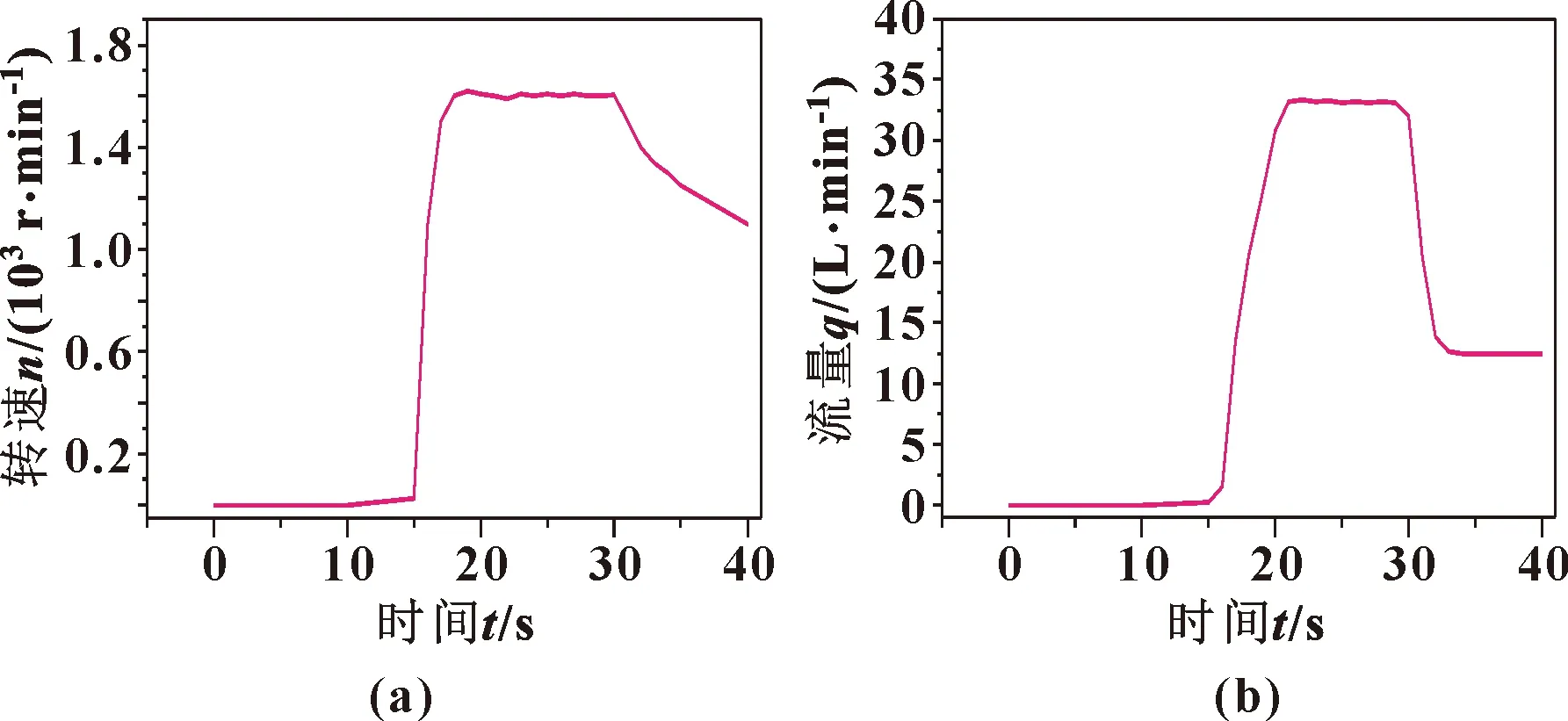
圖10 液壓馬達轉速(a)與流量(b)Fig.10 Speed(a)and flow(b)curves of hydraulic motor
4.2 仿真結果
上述電動叉車在一個工作循環中的各個工況下的能量回收仿真值與理論計算值如表2所示。圖11為典型工作循環下超級電容能量回收曲線,圖12為超級電容電流、電壓變化曲線。
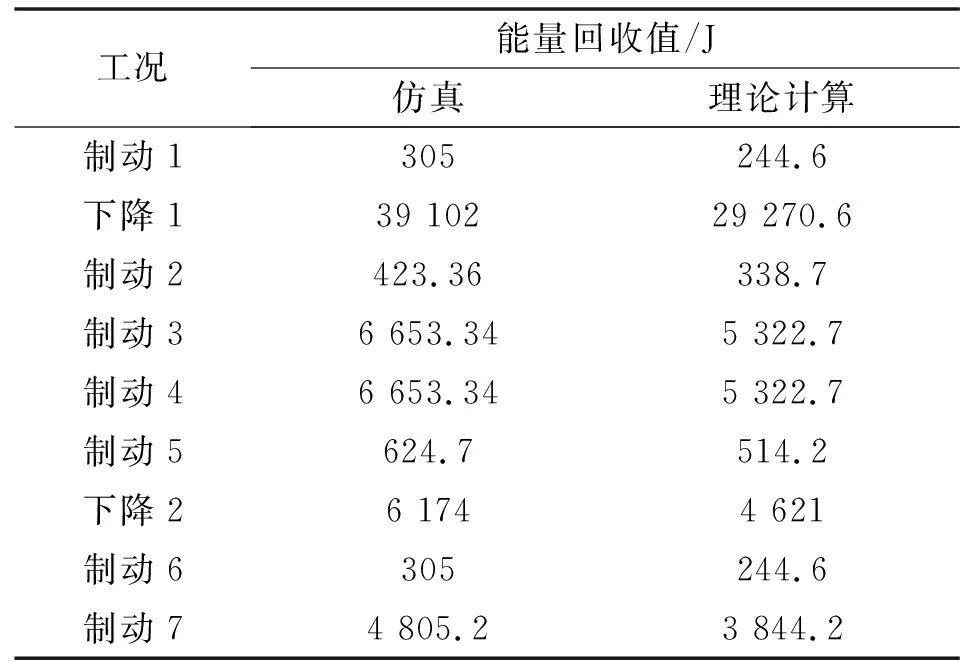
表2 仿真值與理論計算值的比較Tab.2 Comparison of simulation values with theoretically calculated values
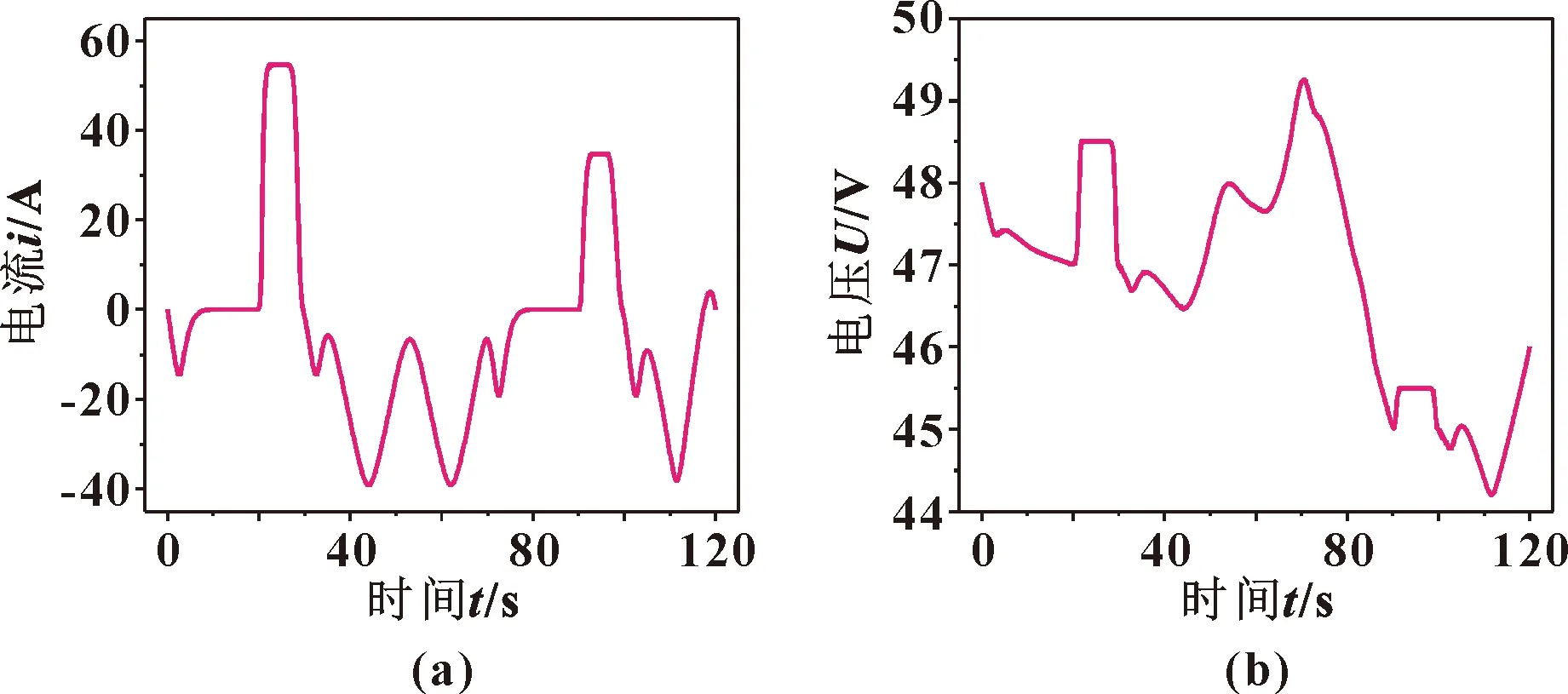
圖12 超級電容電流(a)、電壓(b)曲線Fig.12 Current(a),voltage(b)curves of super capacitor
通過對以上結果的分析,可以發現在一個工作循環中,電動叉車頻繁的升降和起制動中,都存在可回收的能量,相比于單一的能量回收系統,采用提出的能量聯合回收方法,系統能量的回收率和利用率得到提高。
4.3 能量聯合回收效果評價
通過改變負載質量、下降高度、下降速度,分情況進行仿真分析,計算可回收的勢能與制動能。由仿真分析可知,負載越大,下降高度越高,其可回收的能量越多,能量回收效率可以達到55.3%。由此可見,把勢能和制動能聯合回收,可以提高能量的回收效率。能量回收計算結果如表3所示。
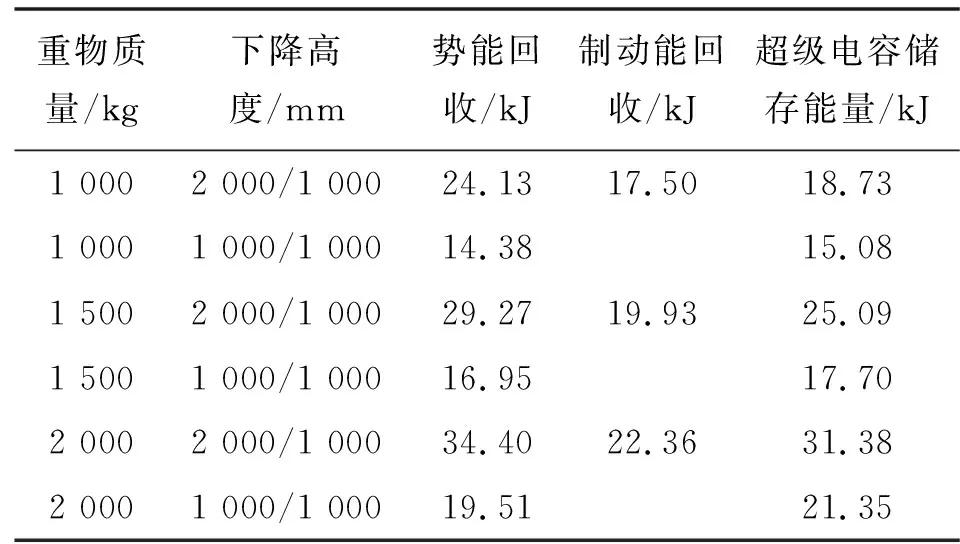
表3 能量回收計算結果對比Tab.3 Comparison of calculation results of energy recovery
能量回收系統曲線如圖13所示,SOC增加,表示超級電容能量越多,反之越少。在重物下降和行車制動的作用下,SOC逐漸變化整體呈增長趨勢,總體上升了16.45%。表明下降的重力勢能和行車制動能轉化為電能儲存在超級電容中,并且充當下一次做功所需能量的提供裝置。通過對比1 000、1 500、2 000 kg不同負載質量下的SOC變化得知,負載質量越大,其SOC增長得越多。
5 結語
(1)以叉車工作特征為基礎,提出一種基于工作特征的電動叉車能量聯合回收方法。確定了以超級電容為儲能裝置的勢能和制動能聯合回收方案,并建立了對應的AMESim/Simulink系統聯合仿真模型。
(2)運用提出的能量回收方案和聯合仿真模型,對某倉庫搬運電動叉車的典型工作過程進行仿真,結果表明通過超級電容對勢能和動能的回收能夠有效提升電動叉車的續航能力,避免了能量的浪費,節能效果明顯。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32