基于時間資源管理的多功能分布式系統協同技術
2023-12-08 06:06:44楊益川張天賢曹旭源李雪婷
現代雷達 2023年10期
關鍵詞:功能
楊益川,汪 兵,張天賢,曹旭源,李雪婷,余 晨
(1. 電磁空間安全全國重點實驗室, 四川 成都 610036) (2. 電子科技大學 信息與通信工程學院, 四川 成都 611731) (3. 四川大學 空天科學與工程學院, 四川 成都 610065)
0 引 言
作為戰爭發展的重要趨勢,分布式作戰中的敵我雙方需利用空間散布的多個裝備節點進行綜合對抗,導致更加復雜的同時多任務處理需求[1-4]。據此,分布式系統需具備穩定的同時多功能能力,從而能夠有效應對復雜對抗環境下的同時多任務處理需求。實現同時多功能主要有單節點集成與多節點協同兩種途徑。受限于體積、功耗、電磁兼容等因素[5-6],單節點集成多種電子設備實現同時多功能時,面臨電磁兼容、體積、功耗等因素的限制,往往需要折中考慮,導致各功能模式工作參數針對性不強,出現性能下降等問題。因此,通過分布式的多個節點協同,實現同時多功能的技術途徑得到了國內外研究人員的關注[7]。現有研究成果主要集中于利用資源管理技術實現分布式系統的有序高效協同,即根據任務/目標和我方節點匹配的思路,在效能數據的支撐下,設計節點資源優化調度算法,將不同任務分配給不同節點,各節點則按照分配結果執行對應任務[8-13]。但是,面對復雜戰場環境的同時多任務處理需求,基于任務分配思想的分布式系統協同方法在穩定性等方面面臨一系列挑戰。
首先,任務分配機制下,各節點通常只執行自己所分配到的任務,與執行其他任務的節點缺乏有效溝通,難以實時掌握其他節點實時工作狀態,導致執行不同任務的節點之間存在互相干擾的風險。舉例來說,任意節點搭載的雷達等高功率傳感器工作時,附近節點的通信、偵察、導航等功能可能會被其干擾,難以正常工作[14-15]。其次,各節點可能因為復雜電磁環境中的干擾信號、自身故障以及被摧毀等原因失效,而任務分配協同機制下的節點失效就意味著其承擔的任務被丟棄,導致系統多任務處理性能跳變,難以維持完整的多任務處理能力。最后,不同類型的任務在數量、預期性能指標、優先級、節點協作方式等方面都存在差異,導致不同的資源調配需求,需要在綜合考慮任務差異與資源限制的基礎上優化分配節點資源,盡可能滿足不同任務需求,但任務分配模式的資源劃分粒度較粗,難以兼顧上述所有需求。
綜上,基于任務分配的傳感器資源管理技術難以滿足分布式作戰需求,需要研究新的分布式系統協同技術,實現多功能的同時降低節點互擾的影響,并具備對節點失效等意外情況的適應能力,此外還可以在考慮不同任務差異的基礎上進行資源優化調配。上述目標的實現主要面臨三方面技術挑戰。
首先,為降低(甚至消除)節點間自擾,需從頻譜、空間以及時間中的任一維度清晰區分不同節點的用頻行為。但是,傳感器需要通過天線向空間輻射/接收電磁信號,但天線副瓣難以消除(通常只能整體降低),且實際應用場景通常還存在復雜的多徑傳輸等問題,因此從空間角度進行區分難度較大。其次,雷達等傳感器在高功率發射狀態下,會產生復雜的交調、互調等難題[16-18],而強對抗環境通常還存在大量非合作方有意/無意的干擾信號,因此從頻譜維度進行區分同樣非常困難。
其次,現代及未來戰場呈現未知因素多、態勢快變多變等特征,因此對故障、損毀等意外因素導致的節點失效情況進行預測(例如哪些節點在哪些時刻會失效)非常困難。同時,實際應用中,可用節點的總數通常有限,因此預留節點資源應對突發、隨機的節點失效等意外情況也非常困難。盡管分布式系統形態上具備應對節點失效的潛能,亦即由于空間散布的多個節點同時因意外全部失效的概率相比于單節點系統大幅降低,故通常假設在部分節點失效后,可重新分配任務并調度節點資源,從而維持系統性能。但該思路對通信依賴度較高,考慮到戰場環境通信受干擾的風險較高,此時節點失效信息的獲取、調度信息的下發等環節都存在時效性風險,可能會出現調整耗時過長、甚至失敗(例如通信被干擾后交互能力完全喪失)等問題,導致整個系統存在長時間無法彌補的性能缺口。針對該挑戰,國內相關領域外研究人員措意不多、成果較少,盡管類似問題已在分布式存儲等領域中得到一定關注,但其研究對象與多功能分布式電子裝備差異較大,難以直接借鑒[19]。
最后,分布式協同技術還需綜合考慮任務差異調配節點資源,以適應實時態勢需求。任務差異可粗略分為兩個方面。一方面,分布式系統自由度高、靈活性好,可按需采用不同模式進行協同:既能接力提高態勢信息連續性(例如多節點對重要目標進行接力跟蹤、接力偵察等),也能聚焦增加信息準確度(例如MIMO探測,多節點協同定位等);另一方面,不同態勢條件下不同任務在優先級、指標要求等方面存在不同,需要根據實際情況針對性進行資源優化調配,最大程度提升系統的多任務處理能力。對第一方面,現有研究成果主要集中于單一協同模式下的資源管理,而針對任務差異的資源調配則主要以單節點為研究對象,面向多節點研究尚處于起步階段。
以具備電子偵察、雷達探測等功能模式的多個節點協同對環境態勢進行綜合感知為例,本文對分布式系統同時實現多功能協同技術進行了研究。首先設計了一種基于節點工作狀態信息共享的節點協同方法,在此基礎上設計了一種節點功能切換時序優化模型與對應優化算法。最后通過計算機仿真驗證了所提方法的有效性。
1 編隊協同方法
為降低節點復雜度與成本,同時提升各功能模式的參數針對性,假設系統節點任意時刻只具備單一功能模式(避免同時多功能面臨的電磁兼容等困難),功能模式按照一定時序自動切換(如果功能模式不進行切換,則各節點只能按照固化的功能模式執行任務,實質上等于基于任務分配)。全系統同時多功能能力通過瞬時不同功能模式的多個節點協同工作實現。
在單節點瞬時單功能、多節點同時不同功能的基礎上,本文綜合利用統一的節點編組配置、完整的任務信息裝訂、一致的功能參數設置與規律的功能時序切換4種措施,設計了一種多功能分布式協同方法。首先給出4種措施的具體含義:
1) 統一的節點編組配置,包含兩個方面,首先按照節點總數給所有節點編號(假設系統由N個節點組成,則各節點依次編號為1,…,n,…,N);其次,各節點已事先通過高精度晶振、原子鐘或導航衛星等技術完成了時間基準建立。
2) 完整的任務信息裝訂,執行任務將當前系統面臨的所有任務相關信息完整地向所有系統節點進行下發(或裝訂)。
3) 一致的功能參數設置,不同節點切換至任意相同的工作模式時,都采用一致參數設置(例如不同節點對某指定區域進行探測時,頻率、極化等參數都相同)。
4) 有序的功能時序切換,不同節點的功能切換時序應盡可能統一或按某種統一規律變化的時序進行切換。
下面給出協同方法基本原理:以瞬時單功能但具備功能切換能力的節點為基本單元,一方面,不對任務集進行拆分,而是將系統當前面臨的所有任務信息統一向所有節點進行加載/裝訂,基于同一時間基準的各節點按照設計好的時序切換功能模式,不同節點的功能時序互相配合,使得全系統可以通過多節點接力、聚焦等方式有序處理所有任務,緩解節點失效對多任務處理性能的影響;另一方面,不同節點的功能切換時序應盡可能統一或按某種統一規律變化,使得各節點可根據自身時序推知其他節點的實時功能狀態,實現低交互條件下的有序協同。便于理解,下面通過一個例子對上述協同方式進行簡單說明。
假設N架搭載有雷達、電子偵察設備的飛機編隊對環境進行協同感知。具體的,假設編隊需要駐留監視1個已截獲的輻射源的工作參數信息,同時利用機載雷達對指定空域進行搜索;保證上述兩個優先任務順利執行的基礎上,還綜合調用節點資源,盡量兼顧協同定位(如交叉測向,時差定位等)、頻段監測等次要任務,最終實現對環境態勢信息的綜合感知。上述任務場景如圖1所示。
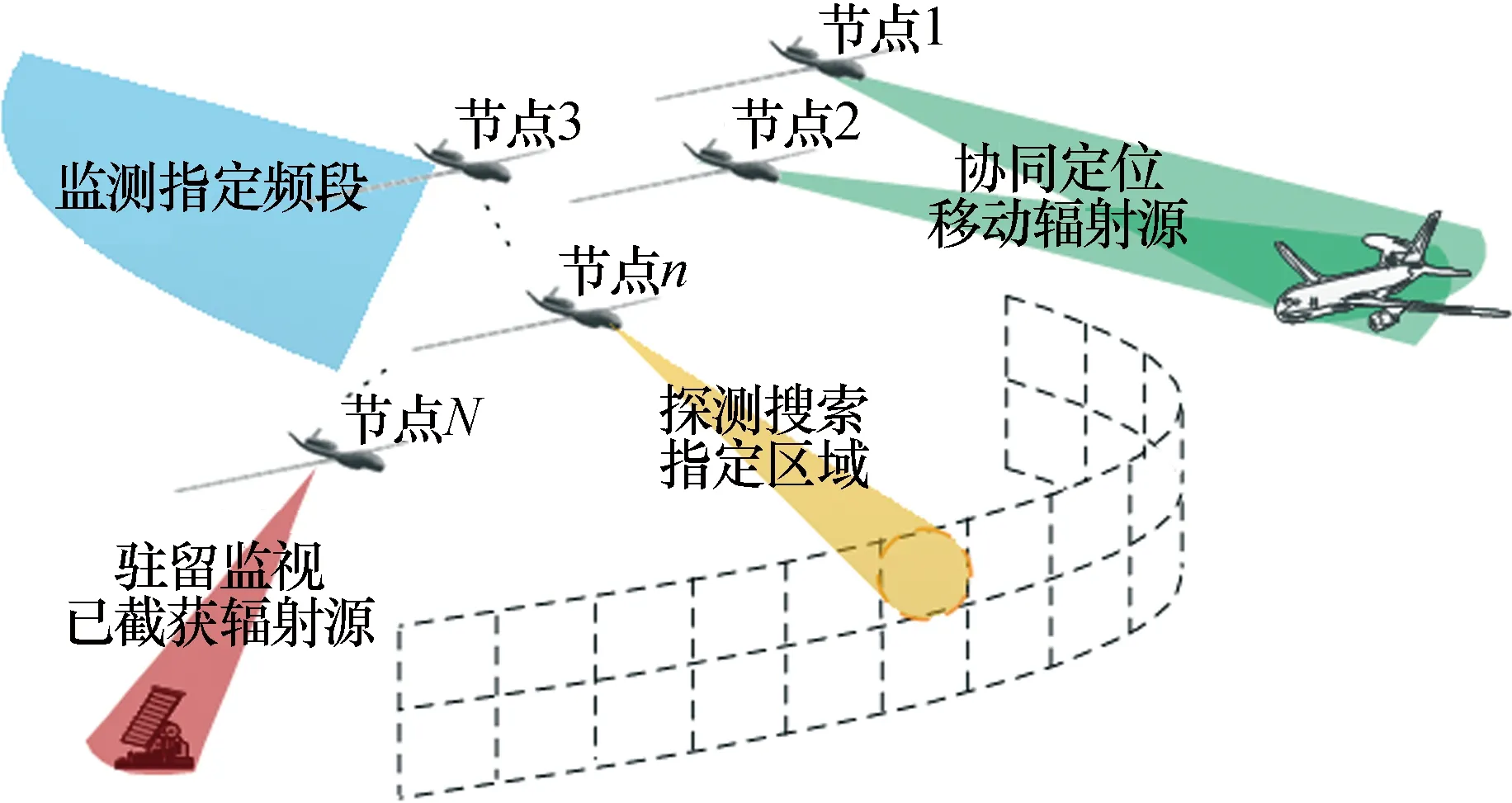
圖1 多機協同感知任務場景示意圖Fig.1 Multi drone collaborative perception scenario
簡化起見,假設編隊包含3架飛機(N=3),執行任務前(起飛前或抵近任務區域途中)已經完成對所有節點建立統一的時間基準,同時任務信息數據獲取與裝訂(起飛前通過情報獲取,或抵近任務區域途中獲取)、功能切換時序生成與下發等步驟也已完成。抵達任務區域后,各節點按照任務信息、各自功能切換時序開始工作,各節點的功能切換時序與全系統綜合功能時序如圖2所示(便于展示,各節點開始工作后的5次功能時序切換用虛線進行了對齊和標注)。
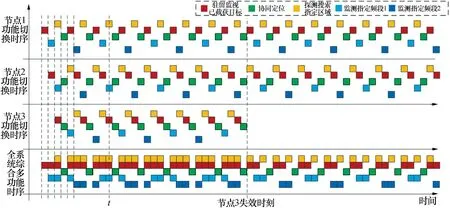
圖2 3機協同各節點及全系統功能時序示意圖Fig.2 Function time sequence of each node and the whole system for 3 drones collaborative
如圖2所示,任意時刻節點1~3都按照時序規定的單一功能模式工作。統一時間基準下,節點1首先開始工作,節點2在節點1首次功能切換時刻開始工作,節點3則在節點2首次功能切換時刻開始工作,在時間基準精度滿足要求、所有節點的功能切換時間完全對齊(如虛線部分所示)的情況下,所有節點的功能時序可以有序地合并為一個全系統綜合多功能時序(上圖最下方時序)。從綜合時序來看,整個系統具備同時多功能能力,可應對同時多任務處理需求(協同定位任務占用時段以外,其他任意時段系統均同時執行多個不同任務)。相比于任務分配,該協同方式在降低自擾、應對節點失效以及根據任務差異針對性配置資源等方面有一定優勢,下面進行分析。
首先,上述協同方式從時間維度劃分節點用頻行為,各節點可根據協同機制推知其他節點工作狀態及工作參數,并針對性采取措施降低節點間的互擾。具體的,統一時間基準下,不同時刻開始工作的所有節點功能切換時間對齊,因此各節點按照任意工作模式工作期間,其他節點也是按照其他某種工作模式工作,并不會出現功能切換。又因為不同節點的功能切換時序相同(或具備統一的變化規律),因此各節點可根據自身模式與功能時序,推斷其他節點當前功能模式。又根據一致的功能參數設置,不同節點在采用同樣功能模式時,其系統工作參數都相同,因此任意時刻各節點都可在不利用通信設備交互溝通信息的前提下,準確推知其他節點實時工作狀態信息(利用時序及節點編號推測實時功能模式,再根據功能推測結果與功能參數設置情況推測實時工作參數),然后針對性采取措施,降低其他節點輻射信號對自身的影響。以圖中標注的t時刻為例,此時節點1、2和3分別執行重點區域探測、指定頻段監測和已截獲目標駐留監視任務,此時節點2和3根據時序及編號可推知節點1處于探測模式,又由于3個節點執行探測任務時都采用相同的工作參數,因此節點2和3可以針對節點1的信號參數進行頻域濾波,降低其輻射信號對自身偵察功能的影響。
其次,系統對節點失效具備一定的適應能力。根據失效后的全系統綜合時序,節點3失效后其功能全部失效(從圖中可見,相關功能時序清零),導致分布式系統對已截獲目標的駐留偵察偵察時間、對重點頻段的偵察時間都出現較大空隙,同時對其他頻段的搜索截獲、對重點區域和非重點區域的探測時間也有一定減少。但在節點1和2的有序配合下,整個系統仍然能夠執行所有任務(但節點3失效后,系統可用資源減少,各任務的性能指標都難免有所下降)。
最后,該模式可兼顧不同任務在優先級、協同方式等方面的差異,優化調配節點資源。相比于簡單的依次輪流重復切換功能模式并執行所有任務,上圖各節點功能切換時序設計一方面考慮了任務在優先級上的差異,系統資源更多地傾斜調配給優先級更高的任務(從綜合時序可見,已截獲輻射源駐留偵察和重點區域探測持續時間最長,其他三類任務持續時間較短)。另一方面,系統不僅可以利用節點接力協作增加功能持續時間提高獲取信息的完整度與連續性,還可以可周期性對齊任務執行時段,使得各節點在相同時段內執行同樣任務,從而完成協同定位等任務(如圖中綠色時序所示)。
綜上,可見在單節點瞬時單功能、多節點同時不同功能的系統物理形態基礎上,基于統一的節點編組配置、完整的任務信息裝訂、一致的功能參數設置與規律的功能時序切換4種措施的節點協同方法可使分布式系統具備有序、穩健的同時多功能能力,同時對節點失效具備一定的適應能力。在上述4種措施中,系統功能切換時序處于核心位置,其設計方案直接影響系統多功能性能。時序切換設計可視為一種傳感器時間資源管理問題,其數學實質是優化問題的數學建模與求解過程,下面首先給出時序優化建模過程,然后介紹優化方法原理。
2 時序優化數學建模
從時域角度,大量電子裝備任務都具備一定周期特征,例如雷達周期性掃描周圍空域,電子偵察周期性掃描監視頻段/空域,通信設備周期性發送/接收信息等。因此,借鑒前述研究基礎,利用3元組從時域描述電子裝備任務特征[20-21]。具體的,對于任意周期任務,可以通過單次駐留時長、重復周期以及任務開始時刻3個參數描述其時域特征。假設分布式系統含N個節點,系統面臨的任務可分為K類,各類任務的數量為
M=(M1,M2,…,Mk,…,MK)
(1)
式(1),以第n個節點執行第k類中第mk個任務為例,其3元組表達式為
(2)
(3)
其中j=1和j=2分別代表首次和第二次執行該任務所占用的時段(后續依次類推),分別代表第次執行該任務的起、止時刻。據此,定義節點n的對第K類所有任務的切換時序(即該任務對應的功能切換時序)如下。
(4)
在此基礎上可定義節點對所有K類任務的執行時序為
(5)
最后,可按照下式定義含N個節點的分布式系統對所有任務的執行時序。
Q=(Q1,Q2,…,Qn,…,QN)
(6)
對應的時序優化的目標函數可定義為如下廣義形式為
(7)
其中,G、Gk和gk_mk分別代表多任務指標集、第k類任務性能指標集以及第k類中第mk個任務性能指標,而時序切換設計對應的時間資源管理問題可建模為如下的優化問題。
(8)
其中,H(Q)代表限制條件。顯然,不同場景有不同的任務需求,導致上式中的目標函數與限制條件有不同的具體數學表達式(例如目標函數可以是截獲概率[22]、跟蹤數據率等,而限制條件則可以是任務總數[20],資源沖突程度等)。以多機協同對環境進行綜合感知為例,假設各節點具備偵察、協同定位、雷達探測與電磁頻譜監測等功能模式。假設任務場景中存在多種任務,按照優先級從高到低依次為對已截獲目標駐留偵察、對已截獲目標多站協同定位、對指定空域進行有源探測和對指定頻段進行頻譜監測4類任務。不失一般性,從時間角度協同定位需要定位數據率越高越好,其余3類任務則是持續時間越長越好(已截獲目標駐留偵察時間越長,越能全面掌握目標工作狀態;有源探測與頻譜監測時間越長,越能盡早發現指定空域、指定頻段內的新目標),因此可將目標函數構建為如下形式:
G(Q)=(G1(Q),G2(Q),G3(Q),G4(Q))
(9)
式中:G1、G2、G3和G4分別代表對已截獲目標駐留偵察、對已截獲目標多站協同定位、對指定空域進行有源探測和對指定頻段進行頻譜監測的目標函數。如前所述,駐留偵察、有源探測和頻段監測以提升任務持續時間長度為目標,則其目標函數可表達為如下形式
(10)
而對于協同定位任務,則需要盡量提高其數據率。考慮到協同定各節點偵收時間必須對齊,因此各節點執行該任務的周期必須相同,因此
(11)
根據式(11),可定義協同定位任務目標函數為
(12)
最后,考慮任務優先級,系統需保證高優先級任務得到的資源不少于低優先級任務。至此,可將多節點時序優化模型具體建模為如下的優化問題。
(13)
針對該模型,下節給出優化算法原理。
3 時序優化算法原理
如前所述,在兼顧任務優先級和協同方式差異的前提下,功能切換時序需要能夠讓依次開機的不同節點時序有序合并后可使得全系統具備滿足需要的同時多功能能力。
根據前期研究成果,周期拓展法[18]能夠在綜合考慮周期任務在種類、數量、優先級和性能要求等方面差異的基礎上優化設計系統工作時序。因此本文以該方法為基礎,針對前述多節點協同方法,設計了一種多功能分布式系統節點功能切換時序優化生成算法,具體步驟如下。
步驟1 初始化,讀取待執行任務信息,包括任務種類、數量及任務優先級等相關參數。
步驟2 判斷待優化任務集是否為空集,是則執行步驟6;否則從待優化任務集中取出當前優先級最高的任務(該類任務的數量以M表征)。
步驟3 判斷該類任務是否需要各節點對齊時間執行,是則執行步驟4,否則執行步驟5。
步驟4 設計時序對齊任務時序。
步驟4a 令m=1;
步驟4b 在所有N個節點的空閑時序中尋找起止時刻對齊且要求的時間段,將其對應3元組參數存儲并將該時段標記為已占用時段;
步驟4c 如果m=M,則將該類任務從待執行任務序列中刪除并執行步驟2,否則令m=m+1并執行步驟4b。
步驟5 利用周期拓展法設計時-頻掃描方案。
步驟5a 令m=1;
步驟5b 令n=1;
步驟5c 如果n=1,則執行步驟5d,否則執行步驟5e;
步驟5d 利用周期拓展法在節點所有未占用時段中尋找任務可執行時段,找到后將存儲該時段3元組參數并將其標注為已占用時段,令n=n+1;
步驟5e 在節點開機時刻延遲n-1個任務駐留時段后的所有未占用時段中利用周期拓展法尋找任務可執行時段,將符合要求的時段3元組參數并將其標注為已占用時段,令n=n+1;
步驟5f 如果n=N,則執行步驟5g,否則令n=n+1并執行步驟5c;
步驟5g 如果m=M,則將該類任務從待執行任務序列中刪除并執行步驟2,否則令m=m+1并執行步驟5b;
步驟6 利用存儲的所有任務時段3元組參數生成并輸出所有節點功能切換時序至此優化方法介紹完畢,下一節通過仿真實驗對方法有效性進行驗證。
4 仿真及分析
仿真實驗采用的場景都如圖1所示,仿真考慮的分布式系統由4架飛機組成,飛機搭載有電子偵察與雷達等傳感器設備。系統通過執行長時間駐留偵察已截獲輻射源目標、移動輻射源協同定位、探測指定區域以及監測指定頻段內輻射源工作信息4類任務,實現對周圍環境的綜合感知。
1)輻射源駐留偵察:對已被我方電子偵察設備截獲的重要輻射源目標(例如地基雷達),通過長期偵收其信號,實現對目標工作狀態的準確連續監控;
2)移動輻射源協同定位:對已被我方電子偵察設備截獲的,機動能力較強的輻射源目標(例如機載雷達),通過不同節點交叉定位、時差定位等方式對其進行定位,獲取其運動軌跡信息;
3)指定區域探測:利用機載雷達進行有源探測,例如對指定的區域(例如距離編隊一定距離的搜索屏/墻區域)進行探測搜索,截獲處于電磁靜默狀態的輻射源目標;
4)指定頻段監測:周期性偵收、分析指定頻段內的輻射源信號,掌握編隊周圍電磁環境中輻射源數量及工作狀態,根據實時態勢等信息從中選擇需駐留監視或需要協同定位的目標。
上述4類任務的具體設置如表1所示。
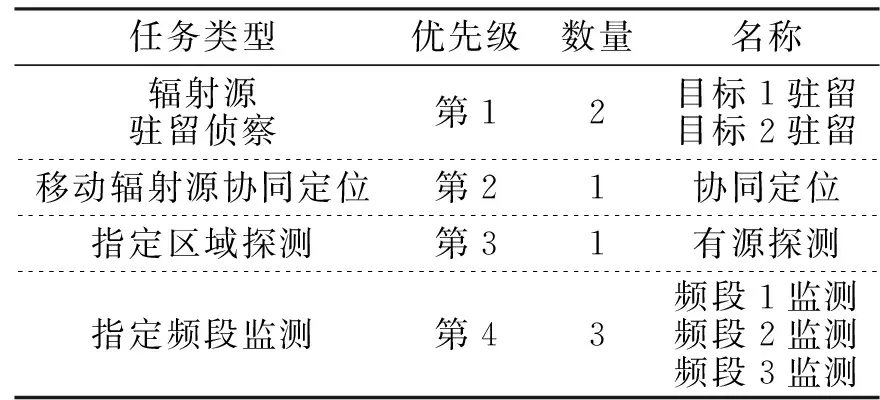
表1 仿真參數設置Tab.1 Simulation parameter setting
設置仿真時長為20 s,分2次實驗:第1次假設時間基準統一精度較高、系統功能切換速度較快,因此將各節點功能切換時隙間隔設置為200 ms,節點2、4分別在開機后第8 s和第16 s因意外因素失效;第2次假設因時間基準統一精度較低、系統功能切換速度較慢等原因,節點功能切換時隙間隔為500 ms,此時節點1和3在開機第10 s后同時失效。下面給出2次試驗的節點功能切換時序與全系統綜合多功能時序仿真結果。
首先,仿真結果與圖2示例一致,2次實驗各節點瞬時都只按照單一功能模式工作,各節點按照時序切換功能狀態(在任意節點以及全系統時序中,藍色從下至上依次為頻段1/2/3的監測時序,黃色和綠色分別代表探測和協同定位時序,紅色從下至上依次為對目標1/2的駐留偵察時序)。各節點在功能時序的調控下有序協同,任意時刻不同節點分別工作于不同功能模式并執行不同任務,從而使得整個系統具備同時多功能能力,可應對同時多任務處理需求。同時,從仿真圖可見,在各節點都開始工作后,不同節點都在相同的時刻切換功能,這意味著節點功能切換時序已有序對齊(即任意節點根據在任意單次功能模式持續時間內,其他節點不會切換功能模式)。因此,各節點可根據加載的功能切換時序(包括自身時序和其他節點時序)以及節點編號準確預測其他節點任意時刻的功能模式,進而可通過完整的任務信息裝訂以及預先設定的一致的功能參數推知其他節點輻射源實時工作參數,最終根據上述信息采取針對性措施降低其他節點對自身的干擾(例如在其他處于輻射狀態的節點,在其工作頻點以及平臺所處方位附近進行頻域/空域濾波)。
其次,根據圖3a)和圖3b)節點失效后的時間段來看,盡管部分節點失效會一定程度造成整體性能下降(例如駐留偵察、探測以及頻段監測任務的持續時間降低,協同定位可選擇的節點減少等),但分布式系統仍然保持同時多功能能力,所有任務依然得到有序處理,這說明本協同方法可使分布式系統對損毀、干擾、故障等意外因素導致的節點失效問題有較好的適應能力,可在各種情況下(例如不同失效時刻、不同失效節點等難以預測的意外情況)維持系統多任務處理能力,避免系統同時多任務處理性能出現跳變。
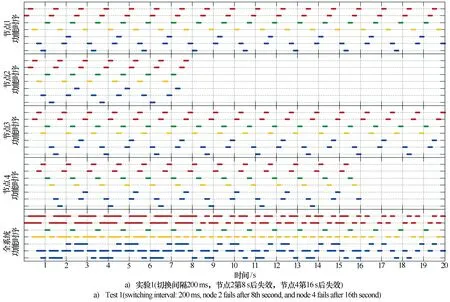
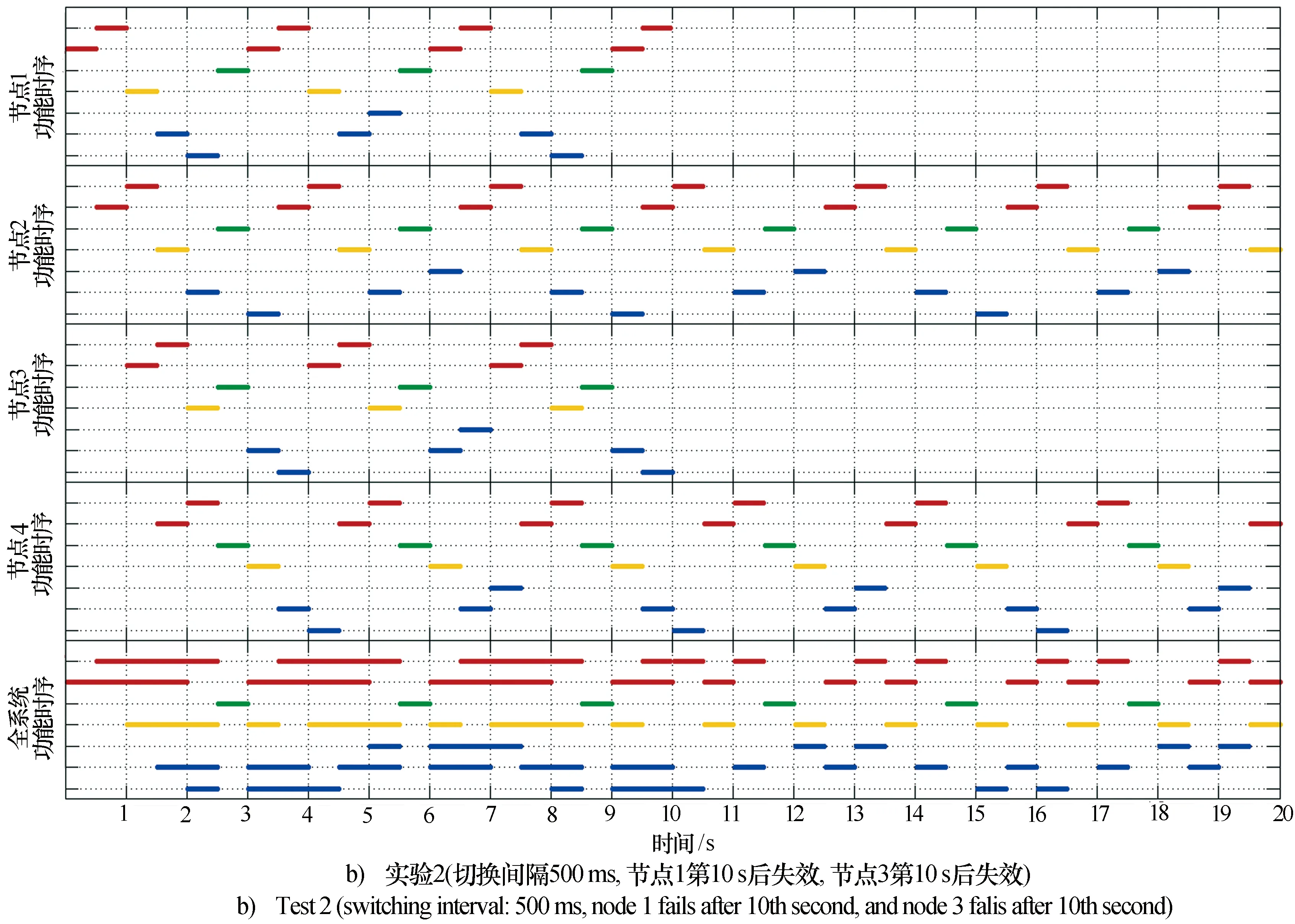
圖3 節點功能切換時序與全系統綜合多功能時序仿真結果示意圖Fig.3 Function switching time sequences of nodes and comprehensive multi-function time sequence of the whole system
然后,功能切換時序可以針對協同工作模式、任務優先級等不同方面的差異針對性調配資源。對于駐留偵察、有源探測和頻段監測任務,各節點功能時序可有序拼接,增加任務執行時間,提升所獲取的輻射源工作狀態信息完整度、有源探測范圍/距離以及對指定頻段內輻射源的截獲概率。此外,各節點功能時序可周期性對齊,從時間角度支撐系統對移動輻射源目標進行協同定位,并利用節點資源管理技術優化選擇定位性能較好的方案(例如根據基線長度等因素,從4個節點中選擇2個交叉定位性能最好的節點,或從4個節點中選擇3個時差定位性能最好的節點),進一步提升對輻射源的定位性能[23]。顯然,對齊的時序不僅能夠支撐協同定位,也能夠支撐分布式系統采用MIMO探測等其他功能模式及其對應的資源優化管控技術提升性能[24]。此外,根據仿真設置,駐留偵察任務的優先級高于有源探測和頻段監測任務,而從仿真結果可看出駐留偵察時間明顯更多,這說明系統資源根據任務優先級進行了針對性優化配置。
最后,對比圖3a)和圖3b),可見所提方法可適應不同的功能切換時間間隔設置,有序調度分布式系統節點有序工作,支撐整個分布式系統實現穩定的同時多功能能力。這表明所提方法可適應因節點搭載能力(例如實際應用中,節點可能因為承載空間、重量等因素限制,無法搭載原子鐘等高精度時統設備;還可能因為受到電子干擾,無法利用導航衛星進行時統校準)、硬件實現復雜度等條件導致的不同的時間基準統一精度、不同的功能模式切換速度等情況。
5 結束語
本文以提升對節點失效、任務差異等因素的適應能力為目標,提出了一種基于時間資源管理的多功能分布式系統節點協同技術。首先,綜合利用統一的節點編組配置、完整的任務信息裝訂、一致的功能參數設置與有序的功能時序切換設計了一種多功能分布式系統節點協同機制,然后,以態勢環境綜合感知任務為例,建立了一個多功能分布式系統功能切換時序優化設計數學模型并設計了一種時序優化設計算法。仿真結果表明,所提方法可支撐分布式系統實現穩健的同時多功能能力,不僅能針對任務優先級和協同方式的差異優化配置系統資源,還可以在節點因不可控意外因素失效時按需維持系統同時多任務處理能力。需指出的是,本研究尚處于起步階段,由于缺少節點失效等情況的信息反饋(僅能適應節點失效,但無法獲知具體的節點失效信息并進行調整),因此現階段本文所給出的是一種開環協同方法。后續研究計劃將本方法與多功能一體化波形等技術進行結合,通過故障/損毀信息反饋、故障/損毀信息驅動的節點資源調度等技術研究,探索閉環協同方法,增強多功能分布式系統在強對抗環境下的自適應調節能力。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55