一種基于隨機仿真優化的反感知RGPO干擾方法
2023-12-08 06:21:08張澤銳張天賢陳鋒彬李健濤
現代雷達 2023年10期
張澤銳,張天賢,陳鋒彬,李健濤
(電子科技大學 信息與通信工程學院, 四川 成都 611731)
0 引 言
近年來,距離門拖引干擾(RGPO)因其被發現概率小、被感知識別風險低以及對雷達干擾效果顯著等優點而受到廣大研究者的青睞。然而,隨著雷達有源欺騙干擾感知技術研究的深入[1-2],傳統的勻速拖引策略和勻加速拖引策略越來越容易被識別,這就對干擾方所提供的干擾策略提出了更高的性能需求。
目前,RGPO干擾領域的工作主要集中在信號級上干擾信號的波形設計與生成[3-5],卻忽視了在數據級上基于RGPO干擾策略的優化。實際上,數據級上基于干擾策略的優化不僅能夠提升干擾成功率,并且能夠降低拖引策略被敵方雷達感知識別的可能性,是一種極具研究價值的反感知RGPO干擾方法。文獻[6-7]早就指出對時延的設置是影響RGPO干擾策略性能的主要因素,并定性分析了時延對RGPO干擾的影響。此后,利用優化算法對RGPO干擾中的時延設置進行優化成為了研究熱點[8-11],文獻[8]以平均波門偏移距離作為干擾效果的性能評價指標,建立了RGPO干擾的多幀聯合優化模型,提出了基于粒子群優化(PSO)算法的RGPO干擾策略優化方法。文獻[10]針對雷達跟蹤系統干擾性能不足的問題,以粒子群優化算法為基礎提出了一種RGPO干擾策略自適應生成方法。
然而,由于雷達跟蹤過程中存在過程噪聲和量測噪聲,即使干擾策略是固定的,敵方雷達跟蹤系統所產生的干擾結果仍然存在不確定性,使得衡量RGPO干擾策略的性能變得更加困難。并且,在真實的戰場環境下,干擾方依賴偵察分析雷達發射信號來獲得少量的雷達行為特征,準確獲得敵方雷達跟蹤效果的可能性極小,這就意味著干擾方將難以直接觀察到敵方雷達跟蹤系統對干擾結果的準確反饋。因此,RGPO干擾的策略優化并不是一個確定性的優化問題,而是一個隨機仿真優化問題,現有的各種智能優化算法在隨機優化環境下的性能還需要進一步的提升。
基于以上分析,本文首先將RGPO干擾的策略優化問題建模為一個隨機仿真優化(SSO)問題,并設計了一個不依賴于敵方雷達跟蹤系統信息的RGPO干擾策略評價方案。為了解決干擾策略性能評價的不確定性,可以利用重采樣的方法得到干擾策略的評分均值,并以此評價該干擾策略的性能。本文將一種基于假設檢驗的計算預算分配算法與傳統的粒子群優化算法結合,提出了一種基于假設檢驗的計算預算分配-粒子群優化算法(HTCBA-PSO)。最后,通過數值仿真的方式與PSO-ER、PSO-ERN[12]、PSO-OCBA[13]等傳統隨機仿真優化算法進行了比較,驗證了該算法的有效性。
1 RGPO干擾策略優化模型的建立
1.1 RGPO干擾場景建模

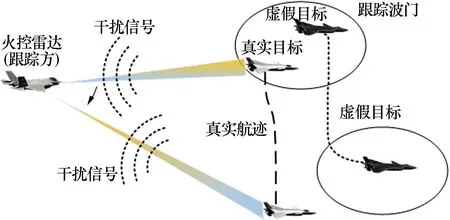
圖1 RGPO干擾場景示意圖Fig.1 Diagram of RGPO jamming
(1)
因此,在第k個干擾階段,真實目標與假目標之間的距離dk可以表示為
(2)
式中:c代表光速。
設真實目標的狀態方程為
X(k)=f[k,X(k-1)]+ψ[,X(k-1),v[X(k-1)]]
(3)
式中:X(k)表示第k個干擾階段真實目標的狀態向量;f[·]表示當前干擾階段狀態與下一干擾階段狀態之間的狀態轉換函數;v[·]表示過程噪聲序列;ψ[·]表示過程噪聲的分布函數。

(4)
式中:θ[·]是將dk投影到狀態空間中的投影函數。此時,雷達跟蹤系統對真實目標和假目標狀態矢量的量測值可以分別表示為
Z(k)=h(k,X(k))+ω[k,X(k)]
(5)

(6)
式中:h[·]表示測量函數;ω[·]表示量測噪聲序列。
一般來說,雷達跟蹤系統的數據處理過程為
(7)
(8)
式中:φ[·]表示關聯函數;(k)表示被懷疑來自被跟蹤目標的量測集。由此可以得出雷達跟蹤系統在第k個干擾階段的狀態估計為

(9)
1.2 基于隨機仿真優化的RGPO干擾策略的優化模型
一般情況下,對RGPO干擾結果的評價主要取決于兩點:
(1) 真實目標是否離開跟蹤波門。
(2) 波門拖引距離(POD),即在有限的干擾階段內RGPO干擾將雷達距離波門中心拖離真目標位置的距離。
在本文中對RGPO干擾策略性能的評價將基于以上兩項指標進行。
首先,定義ξ(k)為真實目標在第k個干擾階段是否擺脫跟蹤波門
(10)
式中:ξ(k)=1表示真實目標已經擺脫跟蹤波門,而ξ(k)=0表示真實目標還尚未擺脫跟蹤波門。
(11)
(12)
據此,定義第k個干擾階段的拖引距離為
(13)
為了評價在最后一個干擾階段K的RGPO干擾策略性能,干擾策略性能可以表示為以ξ(K)和拖引距離POD(K)為自變量的函數
(14)

式(14)中包含噪聲和雜波序列,RGPO干擾策略的性能存在不確定性。因此,建立隨機仿真優化模型為
(15)
式中:Ω代表決策空間。
1.3 干擾策略評價方案的優化
POD(k)屬于敵方雷達跟蹤系統信息,并不會在電子對抗中被干擾方輕易獲取,因此,式(14)所表示的干擾策略評價方案要簡化為一種對敵方雷達跟蹤系統信息需求更小的評價方案。
一般情況下,干擾方可以通過在干擾停止時感知敵方雷達工作模式是否改變來判斷真實目標是否已經擺脫跟蹤波門。因此,對于干擾策略性能的評價可以據此分為以下兩種情況:
(1) 如果真實目標沒有擺脫跟蹤波門,即ξ(K)=0,那么該干擾策略的評分將為0。
(2) 如果真實目標已擺脫跟蹤波門,即ξ(K)=1,此時的干擾策略評分將取決于POD(K)。
(16)
式中:d1imit表示為防止異常干擾結果影響干擾策略平均性能而設置的參數。
2 RGPO干擾策略優化算法
2.1 算法整體架構
在本節中,圖2展示了HTCBA-PSO的總體架構和基本原理。HTCBA-PSO的主體包括兩個部分:PSO和基于假設檢驗的計算預算分配。其中,PSO主要用于搜索解空間并生成N個候選解[14],計算預算分配則主要負責分配有限的計算預算M來估計這些候選解的性能。
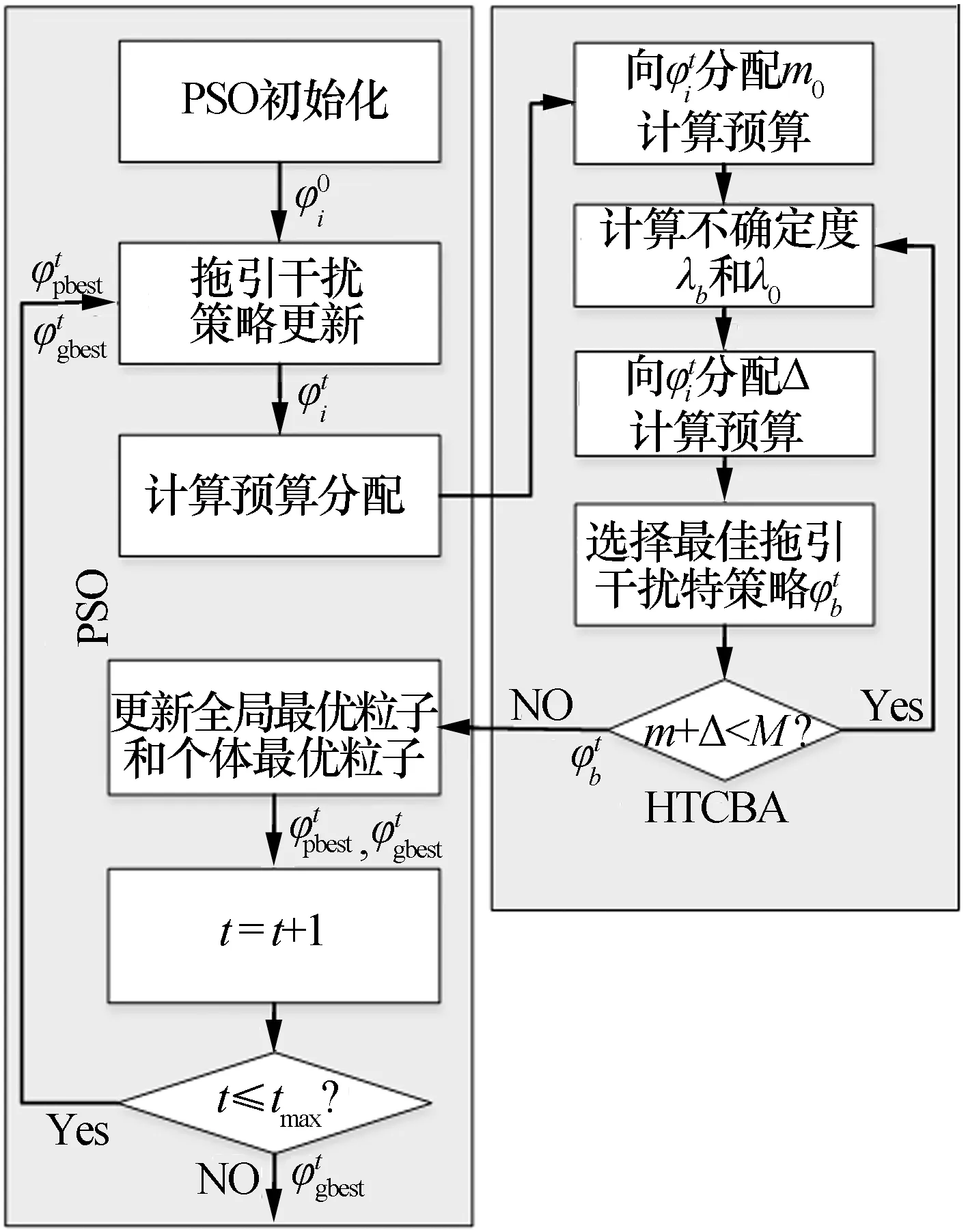
圖2 HTCBA-PSO流程圖Fig.2 Generic diagram of HTCBA-PSO
2.2 PSO粒子更新程序
在PSO的第t次迭代中,每個粒子的位置更新為
(17)

(18)
(19)
式中:tmax表示最大迭代次數,在這里取150;ωmax表示慣性權重的初始值,通常取0.9;ωmin表示迭代結束時的慣性權重值,通常取0.4。
2.3 基于假設檢驗的計算預算分配程序(HTCBA)
為了對PSO生成的候選RGPO干擾策略性能進行評價,本文采用重采樣的方法對候選RGPO干擾策略進行性能估計。顯然,采樣次數越多,該候選策略的性能估計就越準確。但是在現實工程問題中,重采樣次數是重要的計算預算資源,過多的重采樣次數會加大時間和計算預算資源上的負擔,因此重采樣的次數是有限的。本節針對有限的計算預算資源分配問題,提出了一種基于假設檢驗的計算預算分配方法。
計算預算的分配分為多個階段,首先,要將初始計算預算m0分配給PSO所生成的每個RGPO干擾策略,以獲得下一個分配階段中必需的的統計信息。在之后的每個階段,都會根據特定的分配規則面向RGPO干擾策略分配增量計算預算Δ。為了構建一個更為合理的計算預算分配規則,引入了假設檢驗的相關理論。

(20)
(21)
由于自由度必須為整數,要對計算結果進行取整處理,
(22)
此時,該項假設檢驗的p值δij可以表示為
(23)
(24)

λb=max(δb,1,…,δb,o,…,δb,N)
(o∈{1,2,…,N},o≠b)
(25)
λo=δb,o(o∈{1,2,…,N},o≠b)
(26)
顯然,將更多的計算預算分配給具有更高不確定度的干擾策略是選擇最優RGPO干擾策略的關鍵,即不確定度越高的干擾策略將被分配更多的計算預算,因此,可以得到一個分配規則如式(27)所示。
(27)
3 仿真驗證
為了評價HTCBA-PSO在RGPO干擾策略優化上的性能優勢,假設跟蹤目標在二維平面內作近似勻速(CV)運動,并在該跟蹤場景下與其他優化算法進行了對比仿真驗證。
3.1 仿真參數設定
假設跟蹤目標從[50 km, 55 km]處出發,以[50 m/s, 350 m/s]的速度作近似勻速直線運動,跟蹤目標在x軸方向上和y軸方向上的過程噪聲均滿足N(0.52);跟蹤方雷達采用卡爾曼濾波的方式進行跟蹤,其在距離向和角度上的量測噪聲分別滿足N(0,102)和N(0,0.001 752),在x軸方向上和y軸方向上的過程噪聲均滿足N(0,102),跟蹤波門采用橢圓波門,波門參數γ設為16,量測落入波門內概率為0.999 7;干擾方的總拖引幀數為15,d1imit取900 m。
PSO的相關參數已在上一節中介紹。對于HTCBA而言,初始計算預算m0設為100,每一次PSO迭代中所要分配的總計算預算M設為10 000,每個分配階段需要分配的計算預算Δ設為1 000。由于總計算預算數量有限,粒子群中粒子個數越多,分配給每個粒子的計算預算數量就越少。為了探究粒子個數對算法性能的影響,在本節的算法性能對比實驗中粒子個數N將被分別設為40、20和10。
3.2 仿真分析
表1給出了PSO-ER[8,10]、PSO-ERN、PSO-OCBA[9]、HTCBA-PSO四種算法在50次Monte Carlo實驗后所得到的最佳RGPO干擾策略的平均最優。

表1 平均最Tab.1
圖3給出了PSO-ER、PSO-ERN、PSO-OCBA、HTCBA-PSO四種算法在上述仿真條件下,經過50次Monte Carlo實驗后所得到的最佳RGPO干擾策略的平均迭代曲線。

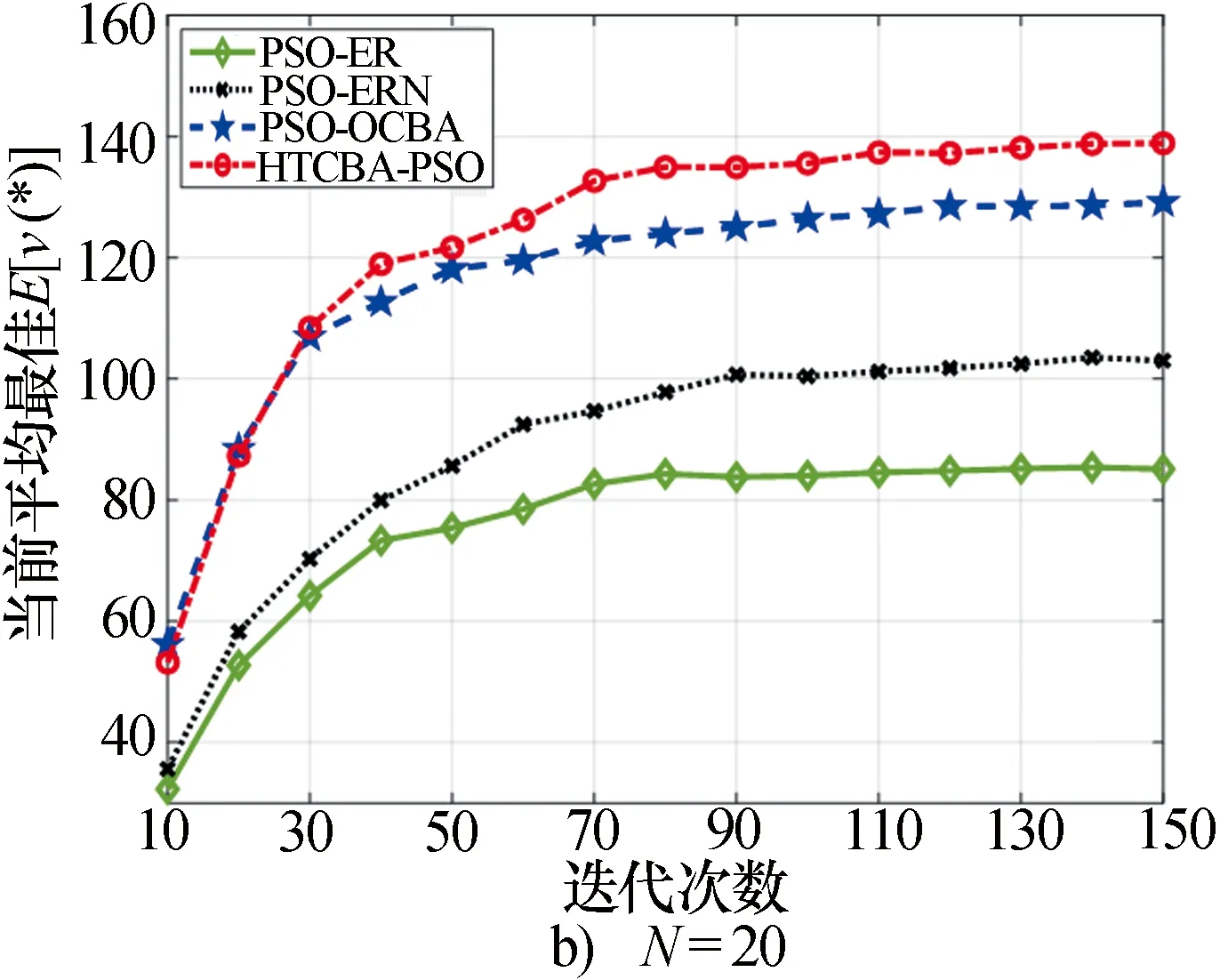
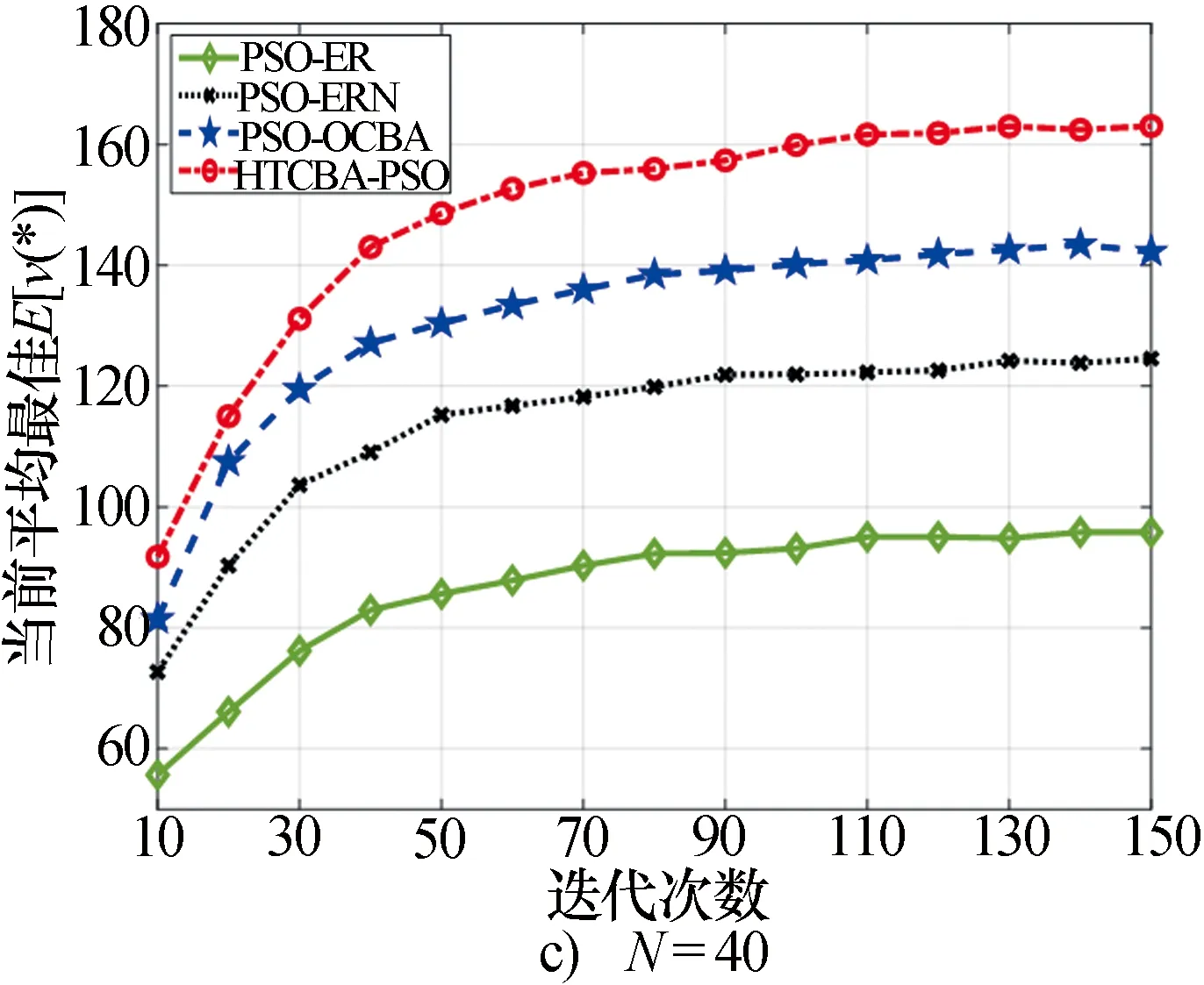
圖3 三種情況下的平均迭代曲線Fig.3 Average iteration profile of
從圖3中可以發現,當從10變化到40的過程中,HTCBA-PSO的性能均優于其他三種算法。同時結合對表1結果的分析可知,當N=10或N=20時,HTCBA-PSO的初始性能較差,但是隨著迭代次數的增加,HTCBA-PSO所得到的RGPO干擾策略性能迅速提高,當N=40時,HTCBA-PSO的初始性能良好,但是性能曲線的提升速度卻小于N=10或N=20的情況。這是因為在N比較小時,HTCBA-PSO本身的搜索能力較弱,導致在迭代初期對解空間的搜索不足。因此,有限的計算預算能夠分配給更少量的候選解,提升RGPO干擾策略性能的估計準確性。因此,性能曲線會隨著迭代次數的增加而迅速提高。但是,這仍然無法彌補在N=10或N=20的情況下HTCBA-PSO對解空間的探索能力不足的問題,所以HTCBA-PSO在N=40時得到的RGPO干擾策略的平均性能要優于其他情況。
上述結果已經可以證明基于HTCBA-PSO的RGPO干擾策略優化算法的性能優于其他算法。但是,通過HTCBA-PSO所得到的RGPO干擾策略的具體干擾效果還需要通過實驗加以驗證。因此,本文將利用POD和拖引成功率(POR)兩項評價指標來測試N=40時通過HTCBA-PSO所得到的RGPO干擾策略的具體干擾效果。傳統的勻速拖引策略和勻加速拖引策略就是讓假目標相對于真目標做勻速運動或勻加速運動來達到拖引波門離開真目標的目的。為了增加對比效果,本文也展示了傳統的勻速干擾策略和勻加速拖引干擾策略在CV場景下的具體干擾效果。
圖4繪制了在拖引速度取154 m/s的情況下,勻速拖引策略在CV場景下的POD箱線圖和POR曲線。通過觀察可知,在勻速拖引策略下,POD箱線圖在最后一幀的上四分位數可以達到383 m;POR在最后一幀可以達到15.04%。
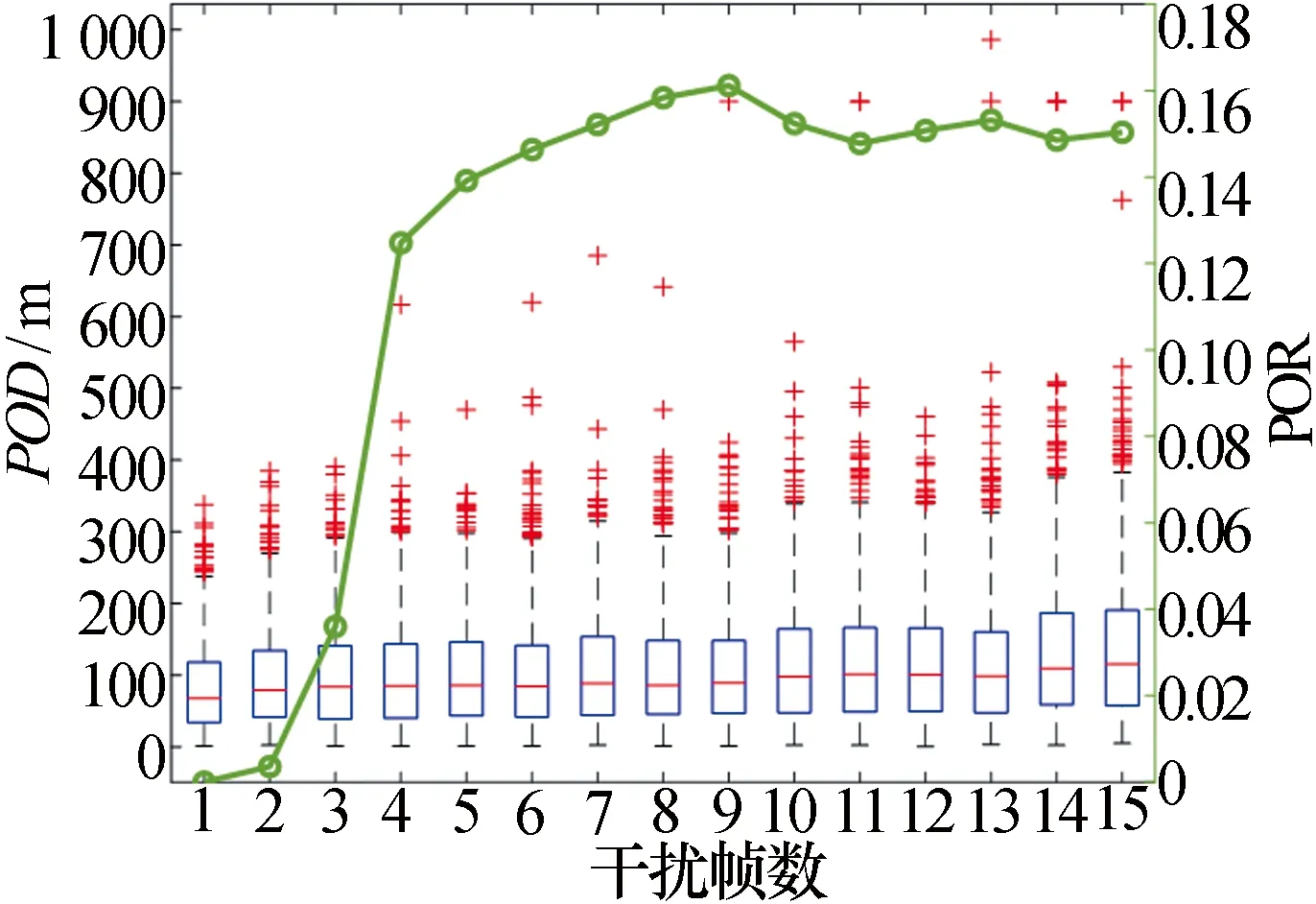
圖4 勻速拖引策略在CV場景下的POD箱線圖和POR曲線Fig.4 Simulation results of POD and POR for uniform velocity pull-off jamming strategy over different jamming stages on CV benchmark
圖5繪制了在拖引初速度取86 m/s,加速度取64 m/s2的情況下[9],勻加速拖引策略在CV場景下的POD箱線圖和POR曲線。
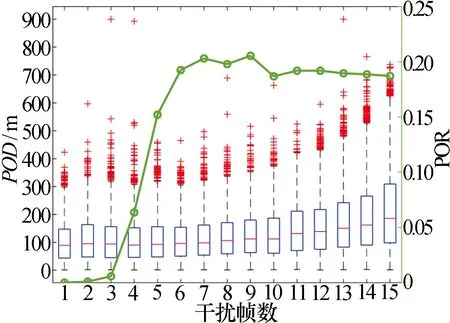
圖5 勻加速拖引策略在CV場景下的POD箱線圖和POR曲線Fig.5 Simulation results of POD and POR for uniform acceleration pull off jamming strategy over different jamming stages on CV benchmark
通過觀察可知,在勻加速拖引策略下,POD箱線圖在最后一幀的上四分位數可以達到626 m;POR在最后一幀可以達到18.72%。圖6繪制了在HTCBA-PSO所生成的RGPO干擾策略下的POD箱線圖和POR曲線。由圖6中的箱線圖可知,隨著干擾幀數的增加,POD的箱線圖逐漸發散,其上四分位數最終可以達到725 m。與此同時,隨著干擾幀數的增加,POR不斷增加,最終達到了接近25%的拖引成功率。然而,在第9幀和第13幀卻出現了在POD持續上升的情況下,POR不升反降的情況。這主要是因為在POR較前一幀有了較大提升的情況下,進一步增大POD將可能會降低干擾量測值落入跟蹤波門的概率,從而導致了POR的下降。將圖6中的兩項拖引干擾性能指標與圖4、圖5對比可知,在HTCBA-PSO所生成的RGPO干擾策略下,POD提升了17.69%,POR提升了9.96%。
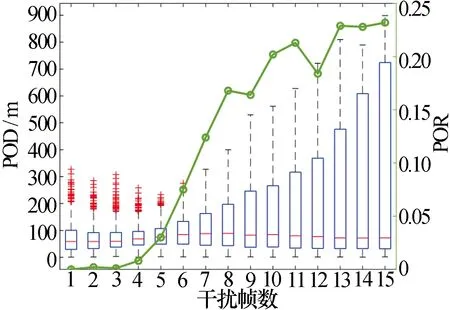
圖6 N=40時HTCBA-PSO所得到的RGPO干擾策略在CV場景下的POD箱線圖和POR曲線Fig.6 Simulation results of POD and POR for the RGPO jamming strategy obtained by HTCBA-PSO at N=40 on CV benchmark
上述結果表明,在HTCBA-PSO所生成的RGPO干擾策略下,被攻擊敵方雷達跟蹤系統的可靠性顯著降低。同時,干擾效果隨著干擾幀數的增加而逐漸增加,這也與RGPO干擾的原理一致。
4 結束語
本文針對隨機優化環境下RGPO干擾策略優化問題,提出了一種基于HTCBA-PSO的RGPO干擾策略優化算法。首先,通過對雷達跟蹤過程的分析,將RGPO干擾策略優化問題建模為一個SSO問題,為了解決干擾方難以獲得敵方雷達跟蹤系統信息的問題,提出了一種不依賴于敵方雷達跟蹤系統信息的RGPO干擾策略評價方案;然后,為了提升傳統算法在解決SSO問題時的性能,提出了一種基于HTCBA-PSO的RGPO干擾策略優化算法;最后,在跟蹤目標做近似勻速運動的背景下,選擇不同種群規模來驗證HTCBA-PSO的有效性,并通過POD和POR兩個物理量來驗證通過HTCBA-PSO所得到的RGPO干擾策略的具體干擾效果。仿真結果表明:在不同種群規模下,HTCBA-PSO的性能均優于其他三種算法,并且與傳統算法相比,本文提出的優化方法能提高干擾方的波門拖引距離和拖引成功率,這對于在電子對抗環境下的反感知RGPO干擾研究具有重要意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24