聯合波形選擇和PRI捷變探通一體化波形設計
2023-12-08 06:21:26楊志航
現代雷達 2023年10期
劉 毓,楊志航,姚 雪,陳 姣
(重慶三峽學院 電子與信息工程學院, 重慶 404130)
0 引 言
雷達探測通信一體化(探通一體化)系統具有資源集約化和功能互補等優點,能有效解決資源浪費和高成本的問題,是多種電子設備綜合一體化系統研究的重要方向之一[1],而探通一體化波形設計是探通一體化系統研究的關鍵內容之一[2-3]。一體化波形研究主要基于以下三類:基于典型的通信波形的一體化波形、基于雷達波形的一體化波形、基于聯合設計的一體化波形[4]。
基于雷達波形的一體化波形設計方法普遍是將通信信息嵌入雷達波形中。常見的方法是對雷達波形進行修改,主要通過對線性調頻信號(LFM)脈沖內進行調頻或者調相的方式來完成通信信息的嵌入[5];或者結合相位調制(CPM),通過對相位的調制來在LFM脈內實現通信信息的嵌入[6-7]。上述方法均增大了一體化波形的自相關水平,并且在低信噪比中有較高的誤符號率。近年來,通過借鑒通信系統中的索引調制[8-12],能夠極大地提升通信的性能。通過索引脈沖重復間隔(PRI)捷變來實現通信信息嵌入[13];或者通過索引載波頻率、對應發射天線的位置來提高通信傳輸速率[14];或者利用多輸入多輸出(MIMO)系統多載波相位調制[15],通過索引稀疏陣列的載波頻率、發射天線的位置來進行調制進一步提高通信傳輸速率。
本文借鑒索引調制,提出聯合波形選擇和PRI捷變的探通一體化波形設計方法。通過對LFM信號附加擾動相位來實現有良好自相關和互相關性能的正交波形集,索引正交波形的選擇、PRI捷變兩個維度來實現通信調制,檢測正交波形和波形發射時延實現通信解調;在雷達處理端,運用壓縮感知稀疏重構算法解決了速度項無法進行相參積累難題,進而完成了目標信息的探測。
1 一體化波形設計
1.1 正交波形集設計
在雷達探測中,假設雷達場景中有一個強目標和一個弱目標,如果波形的自相關旁瓣電平過高則會湮沒弱目標,影響對弱目標的判斷,進而影響雷達對目標探測。在通信中,用發射不同的正交波形來映射不同的碼元,在接收端用正交波形集與發射信號進行互相關來判斷發射的正交波形。如果互相關旁瓣電平過高,則會影響真實發射的正交波形的判斷,進而影響通信信息的解調。
因此,為了保證波形集中的正交波形同時有良好的目標探測和信息傳輸的能力,則有以下兩個設計準則:
(1) 使自相關峰值旁瓣電平(APSL)最小,以滿足雷達的目標探測能力。
(2) 使互相關峰值旁瓣電平(CPSL)最小,以滿足通信信息的解調。
為滿足(1)(2)準則,本文共設計M個正交波形[s1,s2,…,sM],則第m個正交波形sm(t)的自相關函數為
(1)
自相關峰值旁瓣電平表示為
(2)
式中:|X(τ)|的取值范圍為[-Tr,Tr]關于原點對稱;如果在[0,Tr]范圍內定義[0,τmain]表示主瓣的時間范圍,則[τmain,Tr]表示在旁瓣的時間范圍;Tr為脈沖重復周期。
正交波形sm1(t)與sm2(t)的互相關函數為
(3)
互相關峰值旁瓣電平可以表示為
(4)
若在基于LFM信號上通過添加擾動相位來實現波形的相位調制[16],進而實現正交波形的設計,則第m個正交波形表示
sm(t)=βm(t)exp(j2π(fct+Kt2/2))
0≤t≤Tr,m=1,2,…,M
(5)
式中:βm(t)=exp(jφm(t)),φm(t)為相位擾動函數;K為調頻斜率;fc為初始載頻。
相位擾動函數φm(t)定義為
(6)
式中:N為子相位擾動函數的個數;?mn為子相位擾動函數的幅度參數;θmn為子相位擾動函數的相位參數;ωmn為子相位擾動函數的頻率參數。
根據式(6)可知,可以通過設計參數N、?mn、θmn和ωmn,來得到相位擾動函數φm(t),從而實現正交波形集設計。其中N∈[1,100]為正整數;若取子頻帶[B1,B2]∈[0,B],ωmn的取值可在子頻帶[B1,B2]里面等間隔的設置;?mn和θmn都在[0,2π]內隨機選取。
依據設計兩個準則,即滿足APSL≤ξ和CPSL≤ξ(其中ξ為優化門限),則基于線性調頻信號相位調制的正交波形集設計流程如下。
(1) 根據雷達發射機的工作參數,確定基準LFM信號為
s=exp(j2π(fct+Kt2/2)),0≤t≤Tr
(2) 隨機產生?mn和θmn,確定N和ωmn參數,其中ωmn在子頻帶[B1,B2]內等間隔取值,則ωmn=B1+(nN-m+n)ΔB,ΔB=(B2-B1)/(MN-1),m=1,2,…,M,n=1,2,…,N0。
(3) 建立大小為M的波形集,則基于LFM相位調制的波形表示為
其中,βm(t)=exp(jφm(t))。
(4) 計算每個波形的APSL和任意兩個波形的CPSL。
(5)滿足APSL≤ξ,CPSL≤ξ,則輸出波形集,否則返回步驟(2),直到滿足設計。
1.2 一體化信號模型
假設在一個相干處理時間(CPI)內共發射M個脈沖,則發射脈沖數與正交波形個數相同,第m個脈沖的發射起始時間為tm,則聯合波形選擇和PRI捷變雷達發射信號模型可以表示為
exp(j2πfc(t-tm))
(7)
其中,
(8)
式中:rect(·)為單位矩形窗;Tp為脈寬;tm=(m-1)Tr+a(m)ΔT,a(m)ΔT表示第m個脈沖偏離正常時刻(m-1)Tr的時間,a(m)∈{1,2,…,L}表示脈沖位置調制碼字,最小PRI捷變間隔為ΔT,特別令第1個脈沖在正常時間發射,a(1)=0;βm(t)表示附加的擾動相位。聯合波形選擇和PRI捷變雷達發射模型如圖1所示。
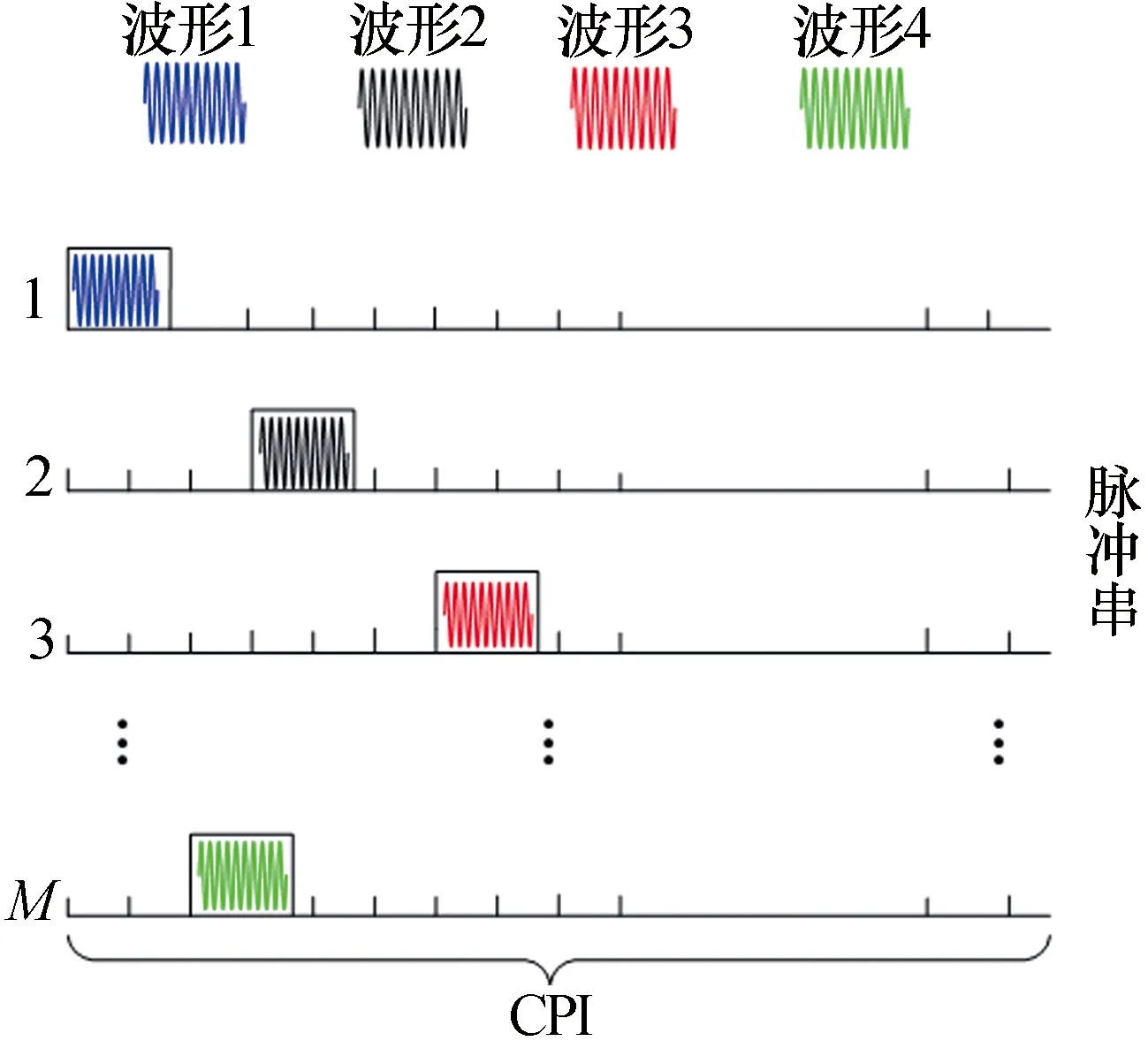
圖1 聯合波形選擇和PRI捷變雷達發射信號模型Fig.1 Jonit waveform selection and PRI agile radar transmit signal model
不同的正交波形及不同發射脈沖的PRI表示不同的碼元信息。通過索引正交波形及發射脈沖延時來實現通信信息的調制。若在一個CPI內傳遞一幀的數據,將這一幀數據轉換為M行的并行數據,每一行的數據為D=D1+D2位。每一行數據中前D1位為不同的時延映射的通信信息,則后D2位表示不同的正交波形映射的通信信息。
本文一共發射M個正交波形,L個脈沖位置調制碼字,則其所承載的通信總數據D和通信速率Rb為
D=?lbL×M」
(9)
(10)
以發射4個正交波形和8個脈沖位置調制碼字進行講解,則PRI捷變映射的通信數據為3 bits,正交波形映射的通信數據為2 bits,一行總的傳遞的通信數據為5 bits。其中一行數據中前3位表示PRI捷變映射的通信信息,后2位表示正交波形映射的通信信息。映射關系如表1、表2所示,通信信息調制如圖2所示。
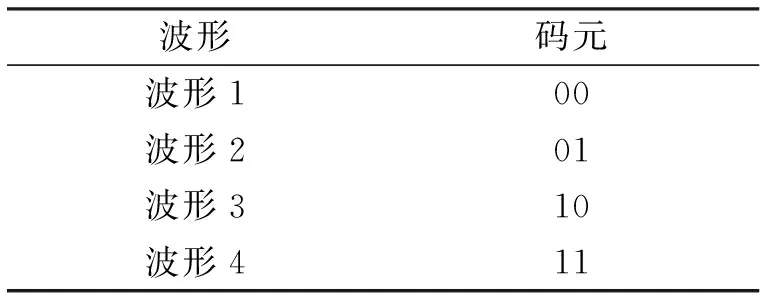
表1 波形與碼元的映射關系Tab.1 The mapping relationship between waveforms and code elements
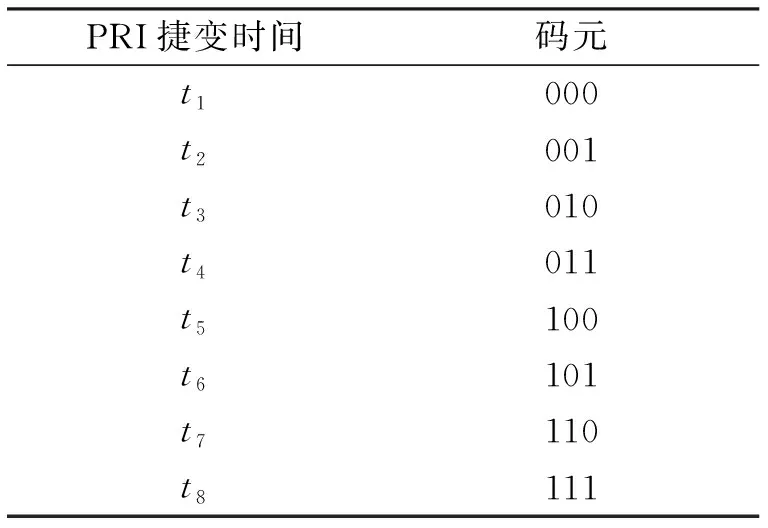
表2 PRI捷變時間與碼元映射關系Tab.2 The mapping relationship between PRI agile time and code elements
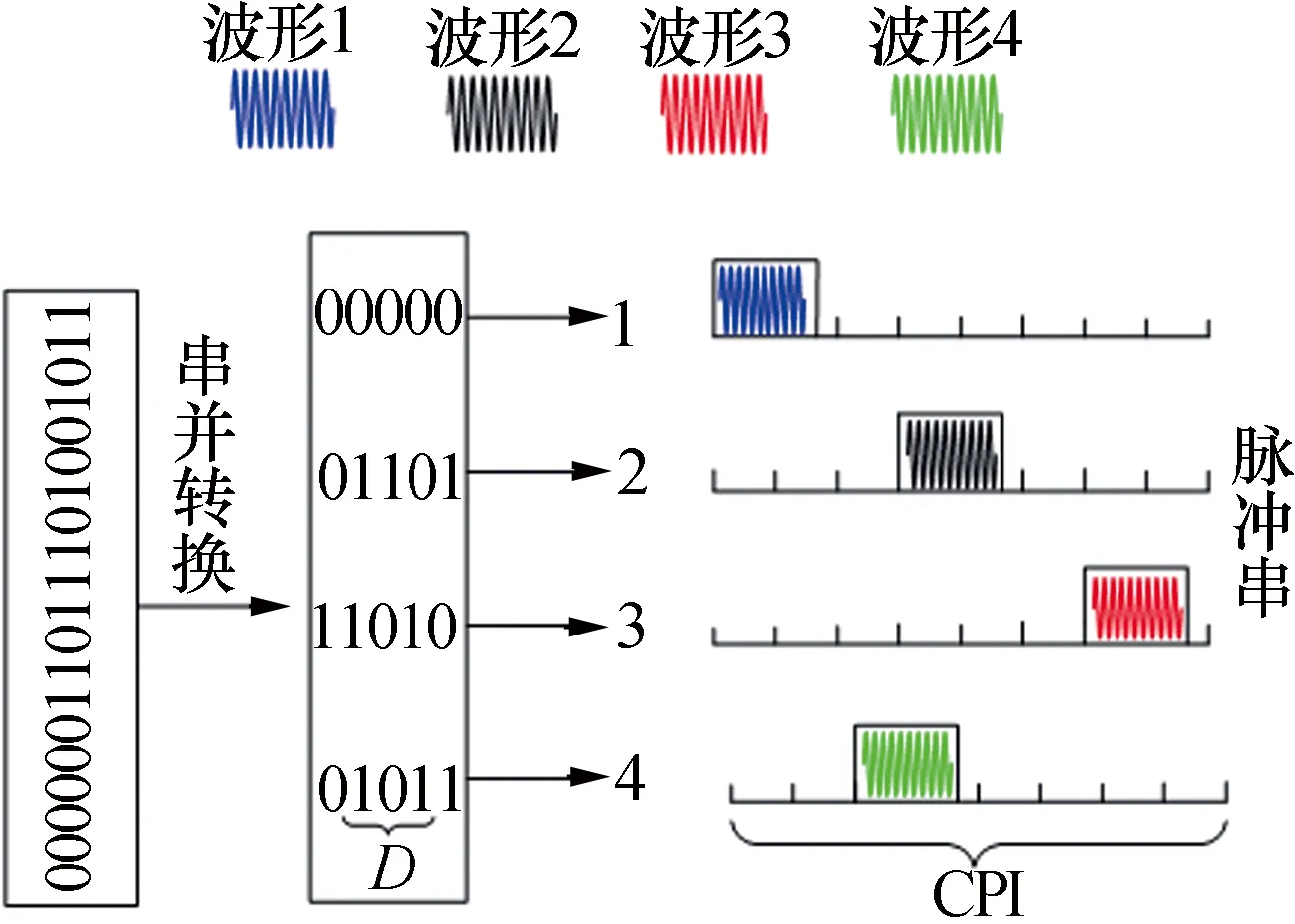
圖2 通信信息調制Fig.2 Communication information modulation
2 一體化信號處理
2.1 雷達信號處理
假設雷達場景中有G個目標,第g個目標的徑向距離為rg,徑向速度為vg,其中g∈{1,2,…,G},則信號經運動目標的反射,雷達接收到的回波信號可以表示為
exp(j2πfc(t-tm-τg))+n(t,tm)
(11)
其中
φR(t-tm)=rect((t-tm)/Tp)·
βm(t-tm)exp(jπK(t-tm)2)
式中:τg=2(rg-vgtm)/c,表示雷達發射信號與接收信號之間的時延。
假設距離分辨單元為ΔR,當速度較小時滿足2vgtm/c<<ΔR,則由于速度引起的距離延遲小于距離分辨單元可以忽略不計,式(11)可近似為
exp(j2πfc(t-tm-τg))+n(t,tm)
(12)
回波信號首先經過下變頻,然后雷達回波按照發射時序關系進行時移,重新排列回波信號,實現目標脈沖回波出現在對應的時延處。根據脈沖的發射時刻tm,將第m個脈沖回波向左平移tm。得到平移后的信號為
exp(j2πfc(-τg))+n(t)
(13)
回波信號分別與發射的基帶信號做匹配濾波,得到脈沖壓縮后的表達式為
exp(-j2πfcτg)+n(t)
(14)
其中,
式中:φR表示φR(t-tm)的自相關;Ag表示第g個目標的脈沖壓縮后的幅值,將τg=2(rg-vgtm)/c帶入式(14)可得
(15)
將tm=(m-1)Tr+a(m)ΔT帶入式(15)可得

(16)
由式(16)中可以看出,回波中存在距離相位項exp(-j4πfcrg/c)、目標速度和PRI捷變的耦合相位項exp(j4πfcvg(m-1)Tr+a(m)ΔT)/c)。由耦合相位項可知,由于PRI捷變引起速度相位的變化,則經過脈沖壓縮后,速度相位項無法進行相參積累。
脈壓后的結果包含距離-速度項,將觀測場景表示為距離-速度平面。在該平面內速度劃分H個獨立的網格,網格的總數H=L>M,速度格點索引為h∈{1,2,…,H}。由于傳統雷達速度分辨率為Δv=c/(2MTrfc),本文采用速度分辨率Δv=c/(2LTfc),可以實現速度超分辨。定義變量
(17)
式中:χh為回波幅度;κh為速度相位項;vh為目標在第h個目標格點的速度。則第h個回波信號表示為
Sr(t)=χhκh(m)+n(t)
(18)
構建感知矩陣
E=[e1,e2,…,eH]M×H
(19)
(20)
將式(20)帶入式(19)可得
(21)
回波信號信號表示為
S=Eθ+n
(22)

(23)
式中:n表示噪聲。
本文采用的正交匹配追蹤(OMP)算法[17],其算法流程如下所示。
1)輸入:觀測信號S;觀測矩陣E;迭代次數V。
2)初始化:殘差r初始值為S,t=1,At為空矩陣。
3)開始迭代:
(1) 計算S與E中每一列的內積,尋找最大列,并將該列記錄到At中。
(4)t=t+1,若t>V則停止迭代。
2.2 通信信號處理
通信接收端接收到的信號為
exp(j2πfc(t-tm-τc))+n(t,tm)
(24)
其中,
φmc(t-tm)=rect((t-tm)/Tp)·
βm(t-tm)exp(jπK(t-tm)2)
式中:τc=R/c表示發射端與通信接收端的時延,在通信接收端經過混頻得到的基帶信號為
exp(-j2πfcτc)+n(t,tm)
(25)

exp(-j2πfcτc)+n(t,tm)
(26)
其中,
m2=1,2,3,…,M
由于正交波形集有良好的互相關特性,每個sm(t)只有在和其對應hm(t)的輸出端有較高的尖峰,即當m1=m2時Am1m2的值最大,則可以通過選擇出最大的峰值,作為原始發射的正交波形,即可以得到正交波形映射的通信數據。
第一個脈沖(參考脈沖)的發射延遲tm是不發生變化的,即t1=0作為參考時間。則通信接收端接收到參考脈沖的回波信號進行匹配濾波后,可以從峰值處對應的時間得到從雷達發射端到通信接收端的時延τc。
對于其余脈沖的發射延遲tm的解調,以參考脈沖發射延遲作為參考,即t1=0。則其余接收脈沖在經過匹配濾波后峰值處的時間與參考脈沖匹配濾波后峰值處的時間做差,即可得到其余脈沖的發射延遲tm,進而解調出tm映射的通信信息。
發射延遲映射的通信數據為D1,正交波形映射的通信數據為D2,則通信總數據D=D1+D2,以此完成總的通信信息的解調。通信解調流程圖如圖3 所示。
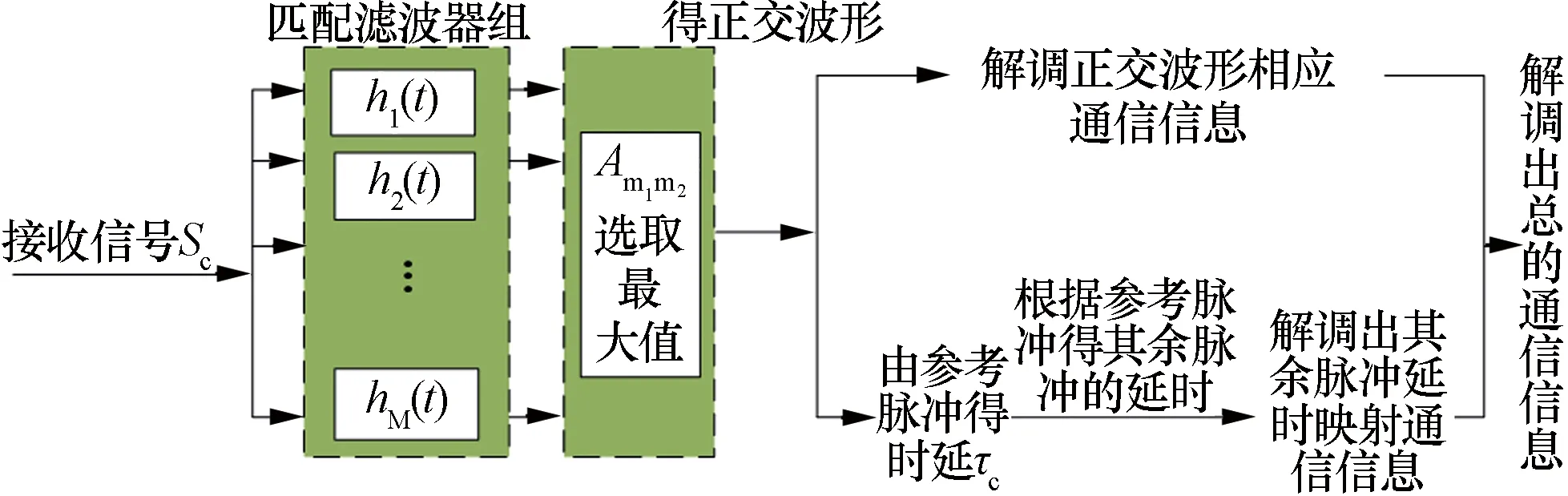
圖3 通信信息解調流程圖Fig.3 Block diagram of communication demodulation processing
以1.2節通信信息調制的例子進行通信信息解調講解。將通信接收端接收到的波形1,2,3,4與匹配濾波器組進行處理,選取最大的峰值,得到波形1,2,3,4所映射的通信信息。再對最大值處所對應的時間減去τc即可得到波形1,2,3,4所對應的tm,則可以解調出發射脈沖時延映射的通信信息,通信信息解調框圖如圖4所示。
圖4 通信信息解調框圖Fig.4 Demodulation of communication information
3 系統仿真分析
為了驗證聯合波形選擇和PRI捷變探通一體化波形設計的有效性,正交波形為脈內調制波形。本文正交波形集和一體化波形仿真參數如表3、表4所示。
表3 正交波形仿真參數Tab.3 Quadrature waveform simulation parameters
表4 一體化波形仿真參數Tab.4 Integrated waveform simulation parameters
3.1 正交波形分析
為了驗證正交波形有良好的自相關和互相關性能,本文與LFM-BPSK波形自相關峰值旁瓣電平進行比較,其中圖5為LFM-BPSK與正交波形自相關峰值旁瓣電平對比圖。從圖5中可以得出LFM-BPSK波形和正交波形自相關峰值旁瓣電平的平均值為-15.66 dB和-22.69 dB,兩者對比后者下降了7.03 dB;LFM-BPSK波形和正交波形自相關峰值旁瓣電平的最差值為-13.78 dB和-20.37 dB,兩者對比后者下降了6.59 dB; LFM-BPSK波形和正交波形自相關峰值旁瓣電平的最好值為-17.26 dB和-24.78 dB,兩者對比后者下降了7.52 dB。圖6~圖8為LFM-BPSK波形和正交波形的APSL的平均值、最差值和最好值對比圖;圖9為正交波形的CPSL圖。仿真結果表明正交波形的APSL均小于LFM-BPSK的APSL。
圖5 自相關峰值旁瓣電平對比圖Fig.5 Comparison of Autocorrelation Peak Parapetaloid Levels
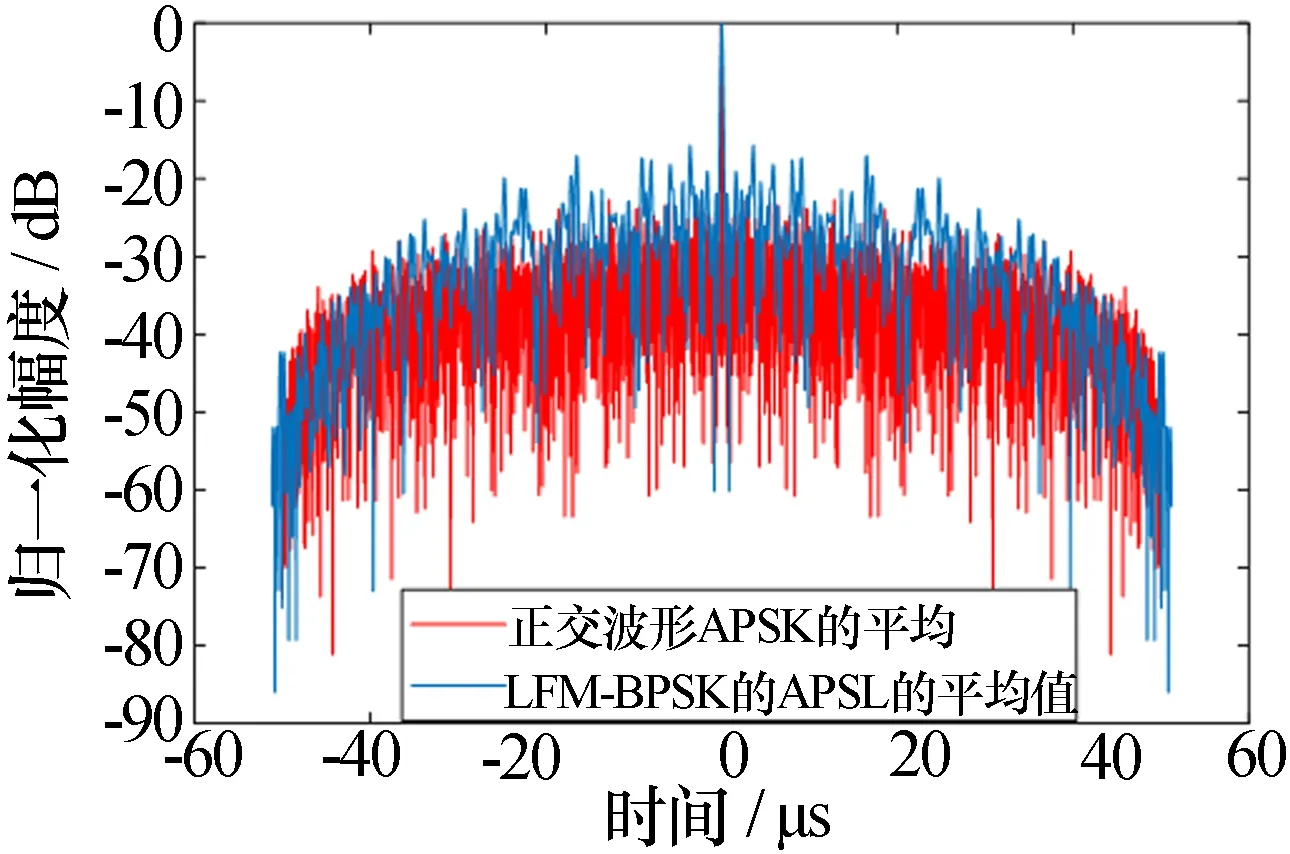
圖6 正交波形與LFM-BPSK的APSL平均值對比圖Fig.6 Comparison of orthogonal waveforms with the average APSL value of LFM-BPSK
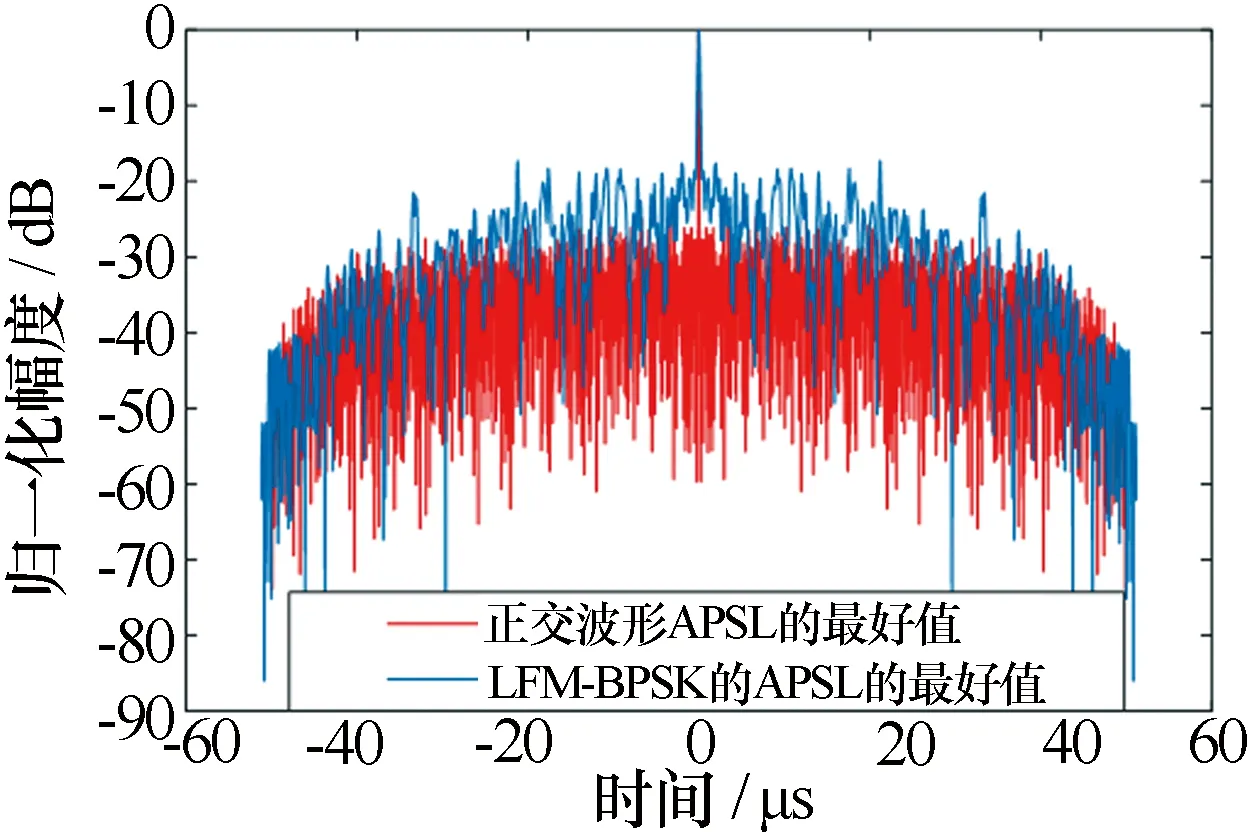
圖8 正交波形與LFM-BPSK的APSL最好值對比圖Fig.8 Comparison of orthogonal waveforms with the best APSL values of LFM-BPSK
3.2 PRI捷變對脈壓的影響
在信噪比為10 dB下,目標在4 300 m處。圖10為發射波形PRI捷變序列圖,選取其中第1、37、45、52個波形,延遲分別為0 μs、6 μs、4 μs、8 μs進行脈壓。圖11為選取的波形在不同距離處回波延遲未補償的脈壓結果。圖12為PRI捷變對于距離處回波延遲補償后和PRI不變的脈壓結果對比,仿真試驗表明,經過回波延遲補償后PRI捷變幾乎未對脈沖壓縮結果產生影響。
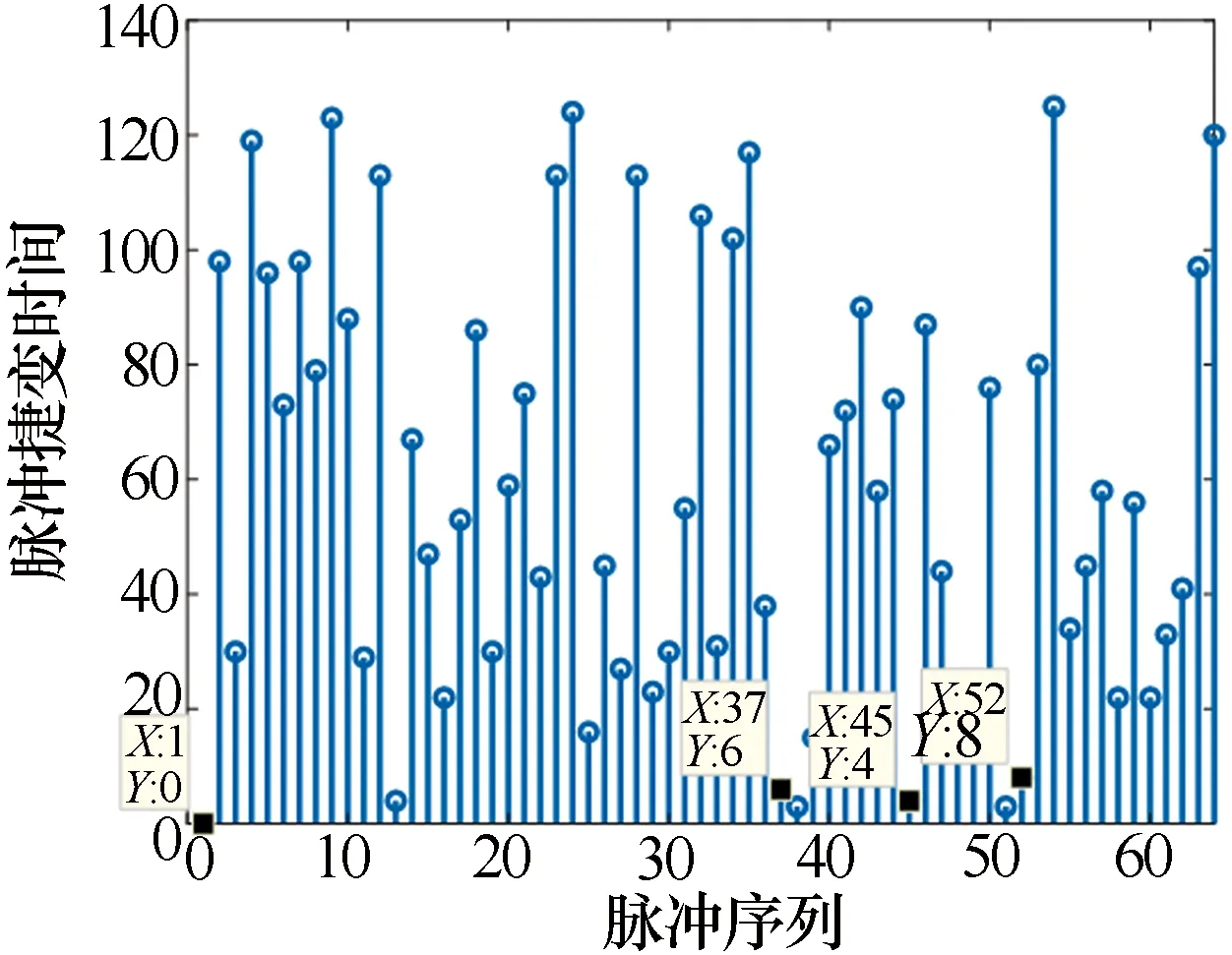
圖10 發射波形PRI捷變序列Fig.10 Transmitting wave form PRI agile sequence
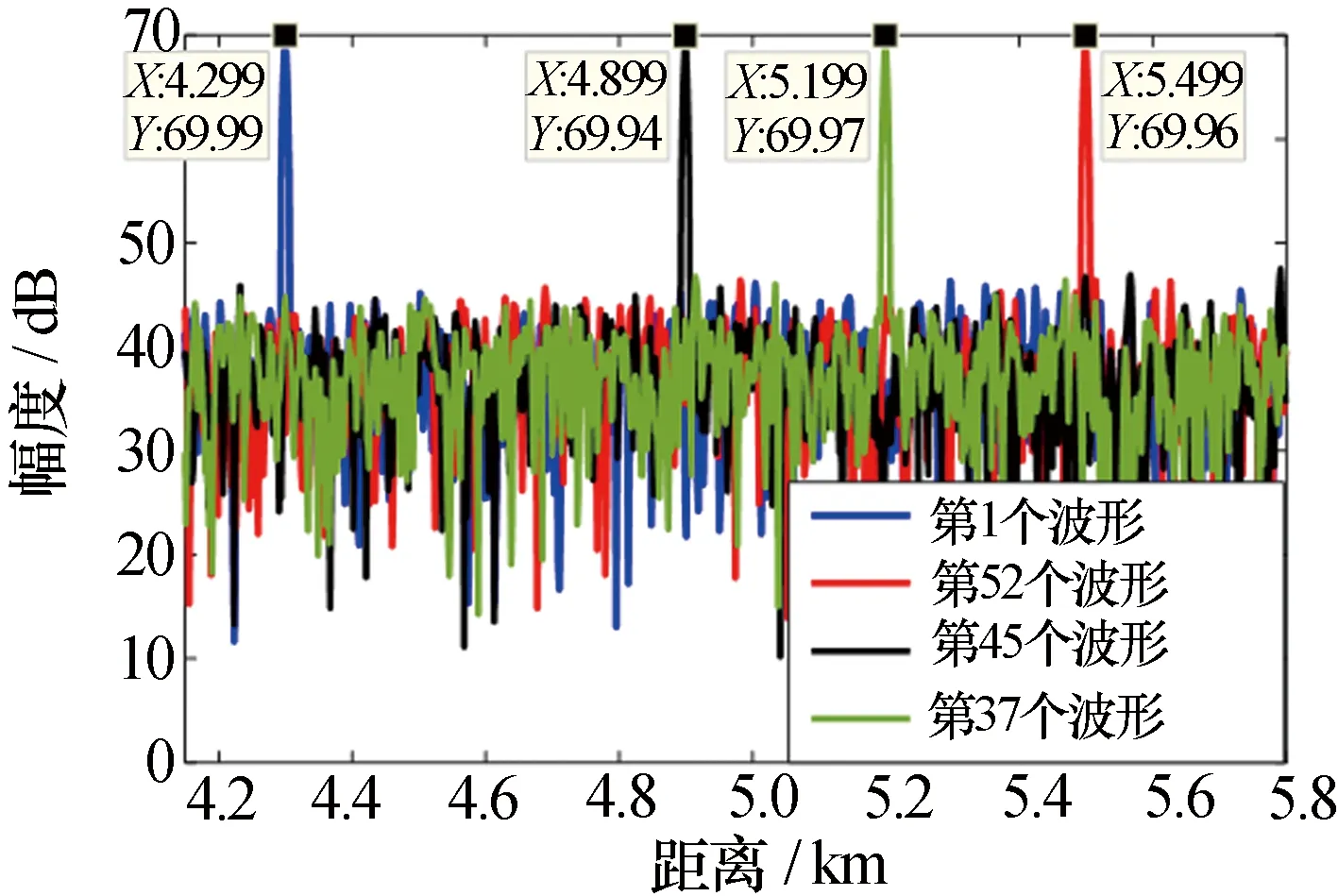
圖11 回波延遲未補償脈壓結果Fig.11 Wave delay uncompensated result

圖12 脈沖壓縮結果對比Fig.12 Comparison of pulse compression results
3.3 雷達性能分析
在信噪比為10 dB下,對于單個目標信息,則OMP算法迭代次數V為1。假設目標的距離為4 100 m,速度為42 m/s,仿真結果如圖13所示,單個目標參數可以準確得到。
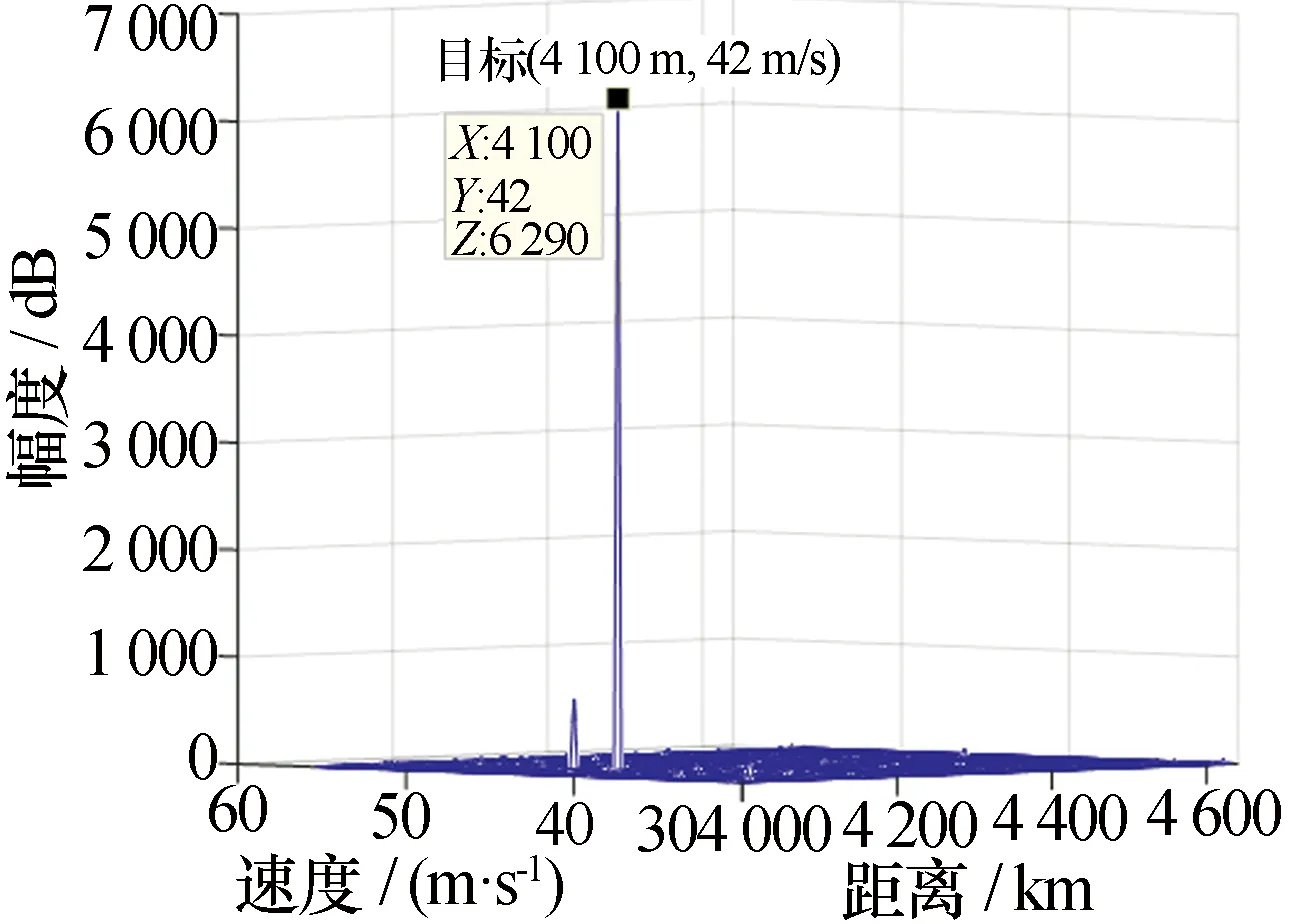
圖13 單目標信息Fig.13 Individual target information
在信噪比為10 dB下,針對于多個目標場景,假設雷達場景中存在3個運動目標,因此設置迭代次數V為3。目標1對應的距離和速度信息為4 050 m、42 m/s;目標2對應的距離和速度信息為4 300 m、50 m/s;目標3對應的距離和速度信息為4 200 m、34 m/s。仿真結果如圖14所示,3個目標參數都可以準確得到。
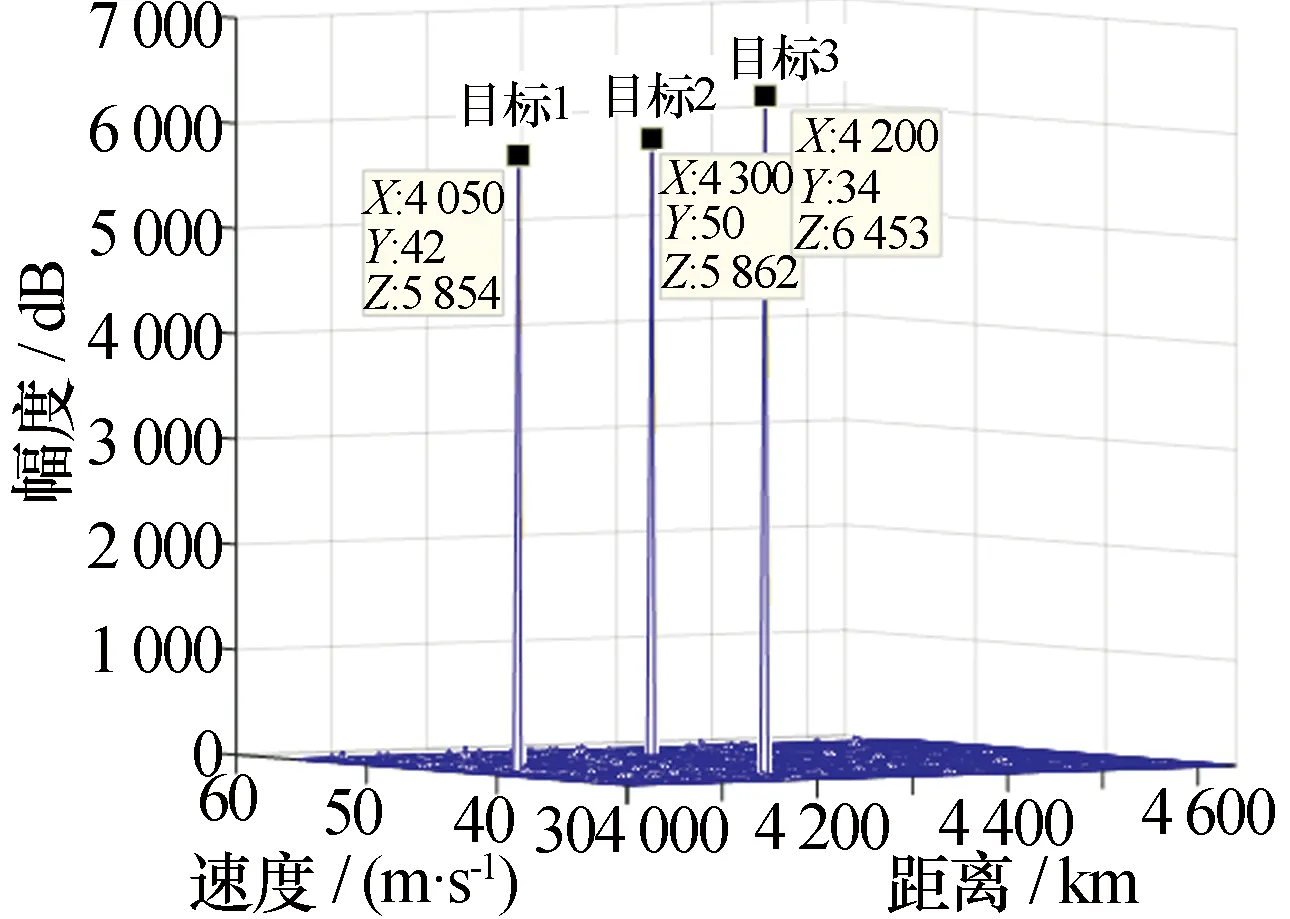
圖14 多目標信息Fig.14 Multiple target information
3.4 通信性能分析
首先,第一個脈沖(參考脈沖)的發射延遲tm是不發生變化的,即t1=0作為參考時間。則通信接收端接收到參考脈沖的回波信號進行匹配濾波后,可以從峰值處對應的時間得到從雷達發射端到通信接收端的時延τc。顯然參考脈沖時延τc的解調正確與否直接影響后面其余脈沖延遲tm的解調,圖15給出了不同信噪比下對參考脈沖時延τc解調的影響。
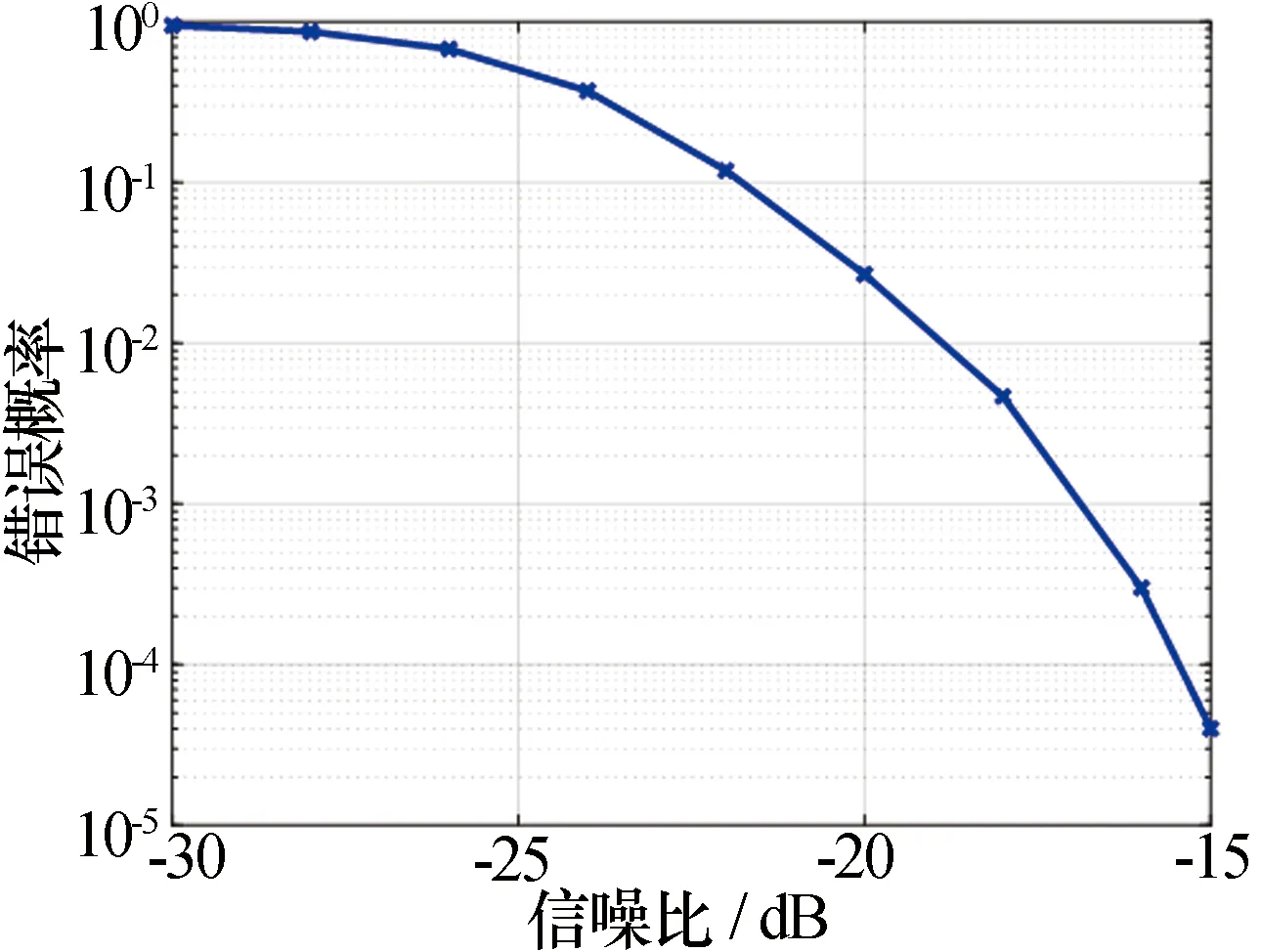
圖15 不同信噪比下參考脈沖時延解調Fig.15 Reference pulse delay demodulation at different signal-to-noise ratios
其次,對于其余脈沖的發射延遲tm的解調,以參考脈沖發射延遲作為參考,即t1=0,則其余接收脈沖在經過匹配濾波后峰值處的時間與參考脈沖匹配濾波后峰值處的時間做差,即可得到其余脈沖的發射延遲tm,進而解調出tm映射的通信信息。當然,噪聲也會影響發射延時tm的解調,圖16 給出了不同信噪比下對于發射延遲tm解調的影響。
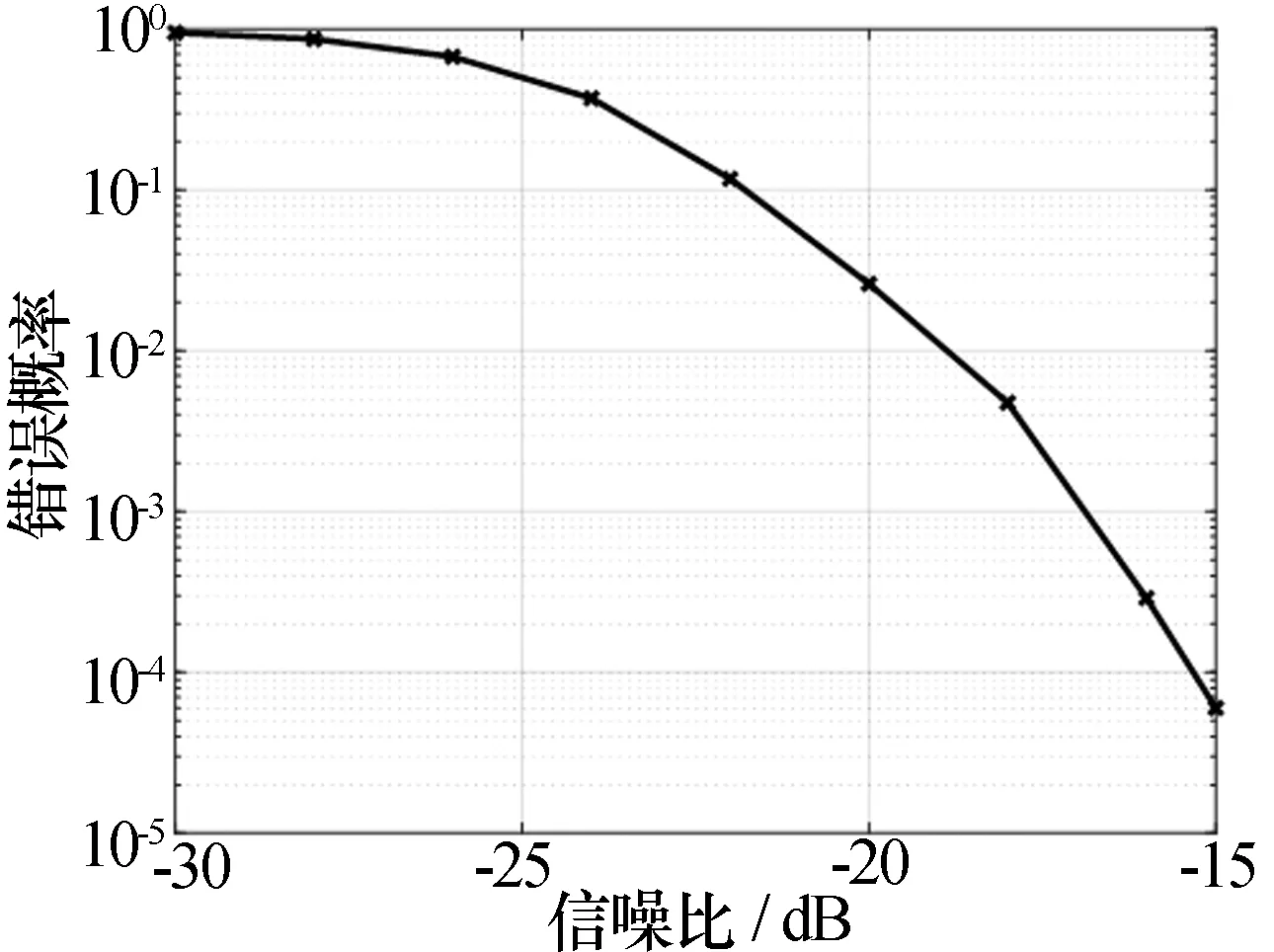
圖16 不同信噪比下其余脈沖延遲解調Fig.16 Demodulation of the rest of the pulses with different signal-to-noise ratios
最后,為了驗證一體化波形通信性能,根據仿真參數可得,利用100 000次蒙特卡羅仿真計算了聯合波形選擇和PRI捷變的誤符號率和LFM-BPSK的誤符號率,誤符號率隨著SNR的變化曲線如圖17所示。
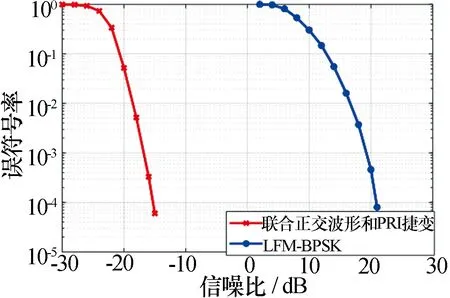
圖17 誤符號率曲線Fig.17 Sign error rate curve
從圖17中可以看出,本文設計的一體化波形相較于LFM-BPSK有良好的通信性能,能在低SNR下實現低的誤符號率。
4 結束語
本文提出了一種雷達探通一體化波形設計方法,通過對LFM信號附加擾動相位來實現正交波形設計,索引正交波形選擇和PRI捷變兩個維度來實現通信信息調制。介紹了該一體化波形用于雷達探測和通信處理流程,利用仿真證明了本文所設計一體化波形能夠在滿足雷達探測的同時實現在低信噪比誤符號率較低。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32