玉米精量播種區段控制技術研究現狀
2024-01-09 02:24:04顏丙新武廣偉李漢青肖躍進梅鶴波董建軍孟志軍
農機化研究 2024年1期
凌 琳,顏丙新,武廣偉,李漢青,肖躍進,梅鶴波,董建軍,孟志軍
(1.廣西大學 機械工程學院, 南寧 530004;2.北京市農林科學院 智能裝備技術研究中心,北京 100097;3.東北農業大學 電氣與信息學院,哈爾濱 150030)
0 引言
玉米精量播種區段控制是將多行播種機以一行或多行為一個區段,按照作業需求,基于既定策略實現各區段獨立控制的技術,可以實現不同區段排種啟停狀態的差異化控制和播種量/株距的差異化調節,從而節約良種,解決地塊內重復作業的問題,實現播種作業全區域植株密度均勻一致。隨著黨中央對節糧減損工作的重視,加強糧食全產業鏈各環節節約減損逐漸成為共識,玉米精量播種區段控制技術因其具有節糧增產的優點,將逐漸成為研究熱點。
隨著我國精量播種技術的發展和普及,播種株距一致性和密度均勻性得到了提高,玉米播種質量也得到了改善;但地頭播種行參差不齊,地塊邊界機具不滿幅作業,且傳統播種作業方式存在重復作業等問題。Velandia等[1]研究發現:重復作業面積占總面積的0.1%~15.5%,且重復作業區域種植密度顯著高于正常作業區域,超過最佳種植密度會降低植物生長速度,造成良種浪費與產量損失[2-4]。Rahman等[4]研究發現:重復作業會浪費多達9.58%的良種。Corassa等[5]發現:玉米產量損失與重復作業面積呈線性關系。由此可見,重復播種作業已經成為制約玉米播種質量提升的重要阻礙。區段控制技術有利于減少重復播種區域,改善播種密度,提高經濟效益。Troesch等[6]指出,區段控制能減少1%~8%的重疊作業區域。Fulton等[7]研究表明:僅使用播種區段控制技術,平均節省4.3%的種子成本,配合農機自動導航,可節省3%~35%。Stombaugh等[8]指出,在特別奇異的地塊可減少25%的成本。愛荷華州立大學[9]的數據表明,重復播種區域會造成12%的產量損失。
區段控制技術早期依賴手動離合器控制排種,效率與經濟性不高。隨著全球定位技術與電子技術的發展,區段控制變得更為精準與智能化,2000年后出現了基于GPS的離合器自動控制方案,并逐漸形成以電機為主流的自動區段控制體系[10-12],滯后補償、地形補償、轉彎補償成為普遍的提高區段控制精度的方法,與農機自動導航、自動轉彎及單體自動提升等技術相配合的區段控制極大地挖掘了播種過程中節本增益的潛力。
歐美發達國家于20世紀30年代對精密播種技術展開了研究[13],對播種區段控制技術已經有了充分研究,現已發展成一種常規技術,在玉米播種中廣泛使用,其受歡迎程度僅次于自動導航、自動轉彎和作業監測技術[14]。John Deere、Case IH、AGCO等公司都推出了區段控制前裝產品,John Deere[15]針對Pro-Shaft單體驅動單元開發的RowCommand系統,通過EPM(Eletronic power modules)模塊控制離合器,系統最多能拓展至16個區段,可實現彎道播種區段控制。Case IH[16]的AFS耕作系統兼容ISO 11783,適用所有ISOBUS作業機具。另外,Ag leader、Pricision planting、Raven等公司都推出了多種播種機后裝區段控制方案[17]。區段控制效果如圖1所示。

圖1 區段控制效果Fig.1 Section control effect
國內播種區段控制研究相對較少,孫楠[18]設計了一種離合器,通過調節離合鍵實現余行停播,改善余行重播的情況。魏劍濤等[19]發明了一種基于已工作區域的農具區段控制方法,采用向量多邊形記錄農具作業區域,通過四分樹數據結構存儲和檢索已作業區;當區段在已工作區時,停止區段作業,防止重疊作業。但是,目前國內玉米播種仍以機械式播種機為主,依賴人為調節機械式離合器的區段控制因費時費力而很少使用,地頭播行參差不齊與地塊余行不滿幅造成的重、漏播情況仍普遍存在,良種與產量均存在損失。隨著現代精細農業的穩步發展,玉米產量供不應求的形勢愈發嚴峻,作物種植將由機械化向智能化方向發展,玉米播種區段控制技術因其智能化程度高、潛在經濟效益好的優點,將得到高度關注與廣泛應用。
玉米精量播種區段控制技術的重點是在準確定位已播種區域的前提下,實現區段位置精準獲取和區段精準獨立控制,確保全區域處在最佳播種密度。為實現精量播種區段控制,首先必須獲取種子著床預測位置,然后與地塊區域進行位置關系判斷,最后根據判斷結果控制相應區段排種啟停。本文圍繞播種區段控制過程,綜述種子著床定位、位置關系判斷和排種啟停控制3個環節的主要研究內容,總結播種區段控制關鍵問題,探究我國玉米播種區段控制技術研究方向。
1 種子著床定位
區段控制需要實時感知種子位置,確定種子與地塊的相對位置關系,同時生成種子覆蓋圖,更新已播區域,反應播種情況。在大田作業中,種子著床定位數據共享是多機協同、高效作業的基礎[20],氣壓、種子種類、排種盤轉速等都會影響播種誤差[21],種子著床點存在較大的隨機性,精確定位困難。當前,研究基于RTK定位技術,以單體位置對種子著床位置進行預測。MR Ehsani等[22]將RTK-GPS設備安裝在單體上,基于單一天線多單體定位模型與定位數據插值方法,獲取低位安裝的光電傳感器觸發時刻的單體位置,以單體位置為種子著床位置,位置誤差在30~38mm。顏丙新等[23]在MR Ehsani的基礎上提出一種基于高位檢測的精播種子著床位置預測方法,避免低位檢測傳感器易被土壤、顆粒等遮擋的情況,并基于EDEM數值模擬和動態仿真,構建種子著床位置補償模型,實現玉米種子著床預測位置精確至厘米級。NORREMARK等[24]提出了一種提高定位精度的方法,利用另一光電傳感器檢測已知位置的標識,修正定位數據,同時使用接收機提供的航向與傾斜計提供的俯仰、橫滾角后處理定位數據,進行地形補償,修正定位數據,相比未補償數據,平均偏差減少了60%。
文獻[22-24]實現的是當前檢測種子的預測位置,但導種管中的種子以種子流的形式存在,區段控制不僅需要當前種子著床位置生成種子覆蓋圖,還需要對后續種子位置做出預測,避免區段控制產生啟停滯后距離。孟志軍等[25]基于落肥分析,建立位置滯后模型,田間試驗表明:位置滯后模型能較好地估算時間延時。Zhao等[26]提出了一種航跡推算方法,基于速度與排種延時預測種子著床位置,降低滯后距離,平均滯后距離為63.4cm,相比于非航跡推算方法,平均滯后距離小于72.2cm。HE等[27]基于室內臺架試驗中高速攝影測定的延時時間,結合航跡推算實時補償,平均滯后距離為0.57m,滯后距離變化在0.07%~0.63%之間。
上述研究均基于天線與單體固定位置模型且直線播種情況下,彎道播種場景下,內外單體速度存在差異。Strasser[28]在模擬種植場景下對電驅排種器進行彎道播種測試,電機轉速誤差在-7.2%~7.9%之間。天線定位點與單體位置也并不固定,因此HE等[29]提出了一種基于GPS的轉彎補償算法,將GPS接收機的定位點、速度與航向轉換為播種機牽引點的對應數據,進而求解各單體的位置。在產品化方面,滯后、地形與轉彎補償等已經得到了廣泛應用。Pricision planting[30-31]的20|20系統設置播種啟停偏差時間,校準區段控制的種子定位點,且提供陀螺儀與GPS組合方式實現轉彎補償,如圖2所示。
John Deere[32-33]終端在設置延時與地形補償的基礎上進行田間標定試驗,利用垂直進出已播區域的滯后距離及對應速度對區段控制進行調優,如圖3所示。
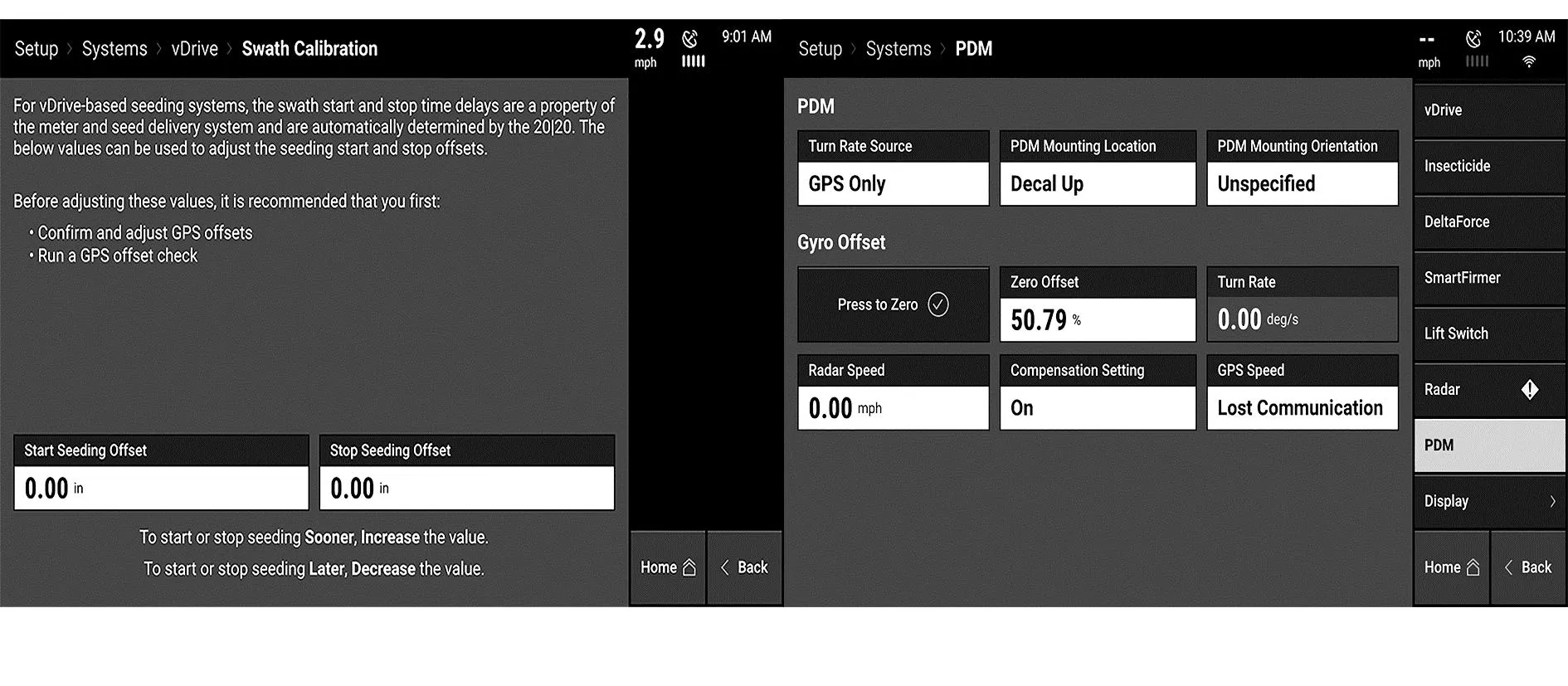
圖2 Pricision planting區段控制補償設置Fig.2 Pricision planting section control compensation setup
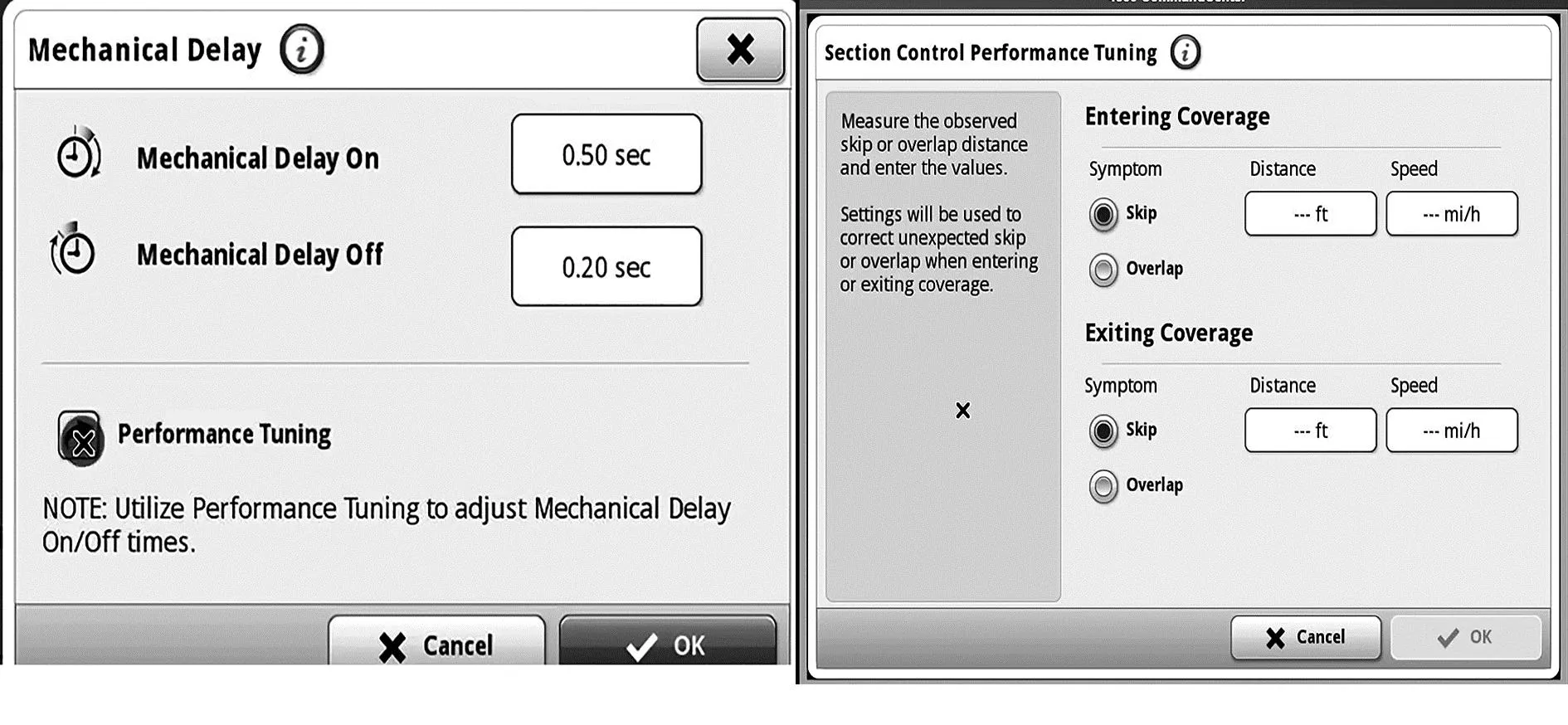
圖3 John Deere區段控制補償Fig.3 John deere section control compensation setup
2 位置關系判斷
區段控制系統需要實時判斷待播種子的著床位置是否處于播種區、已播種區或非播種區,根據判斷策略進而控制排種啟停。實際作業中,受控制器性能限制或區段控制精度需求影響,常以多個播行為一個區段進行控制,通常以該區段中種子預測位置點連線上的某一點作為基點參與運算。由于地塊邊界在計算機中常以依次相連的若干定位點組成的多邊形表示,因此待播種子位置或區段基點與地塊區域的位置關系判斷可抽象為點與多邊形的位置關系運算。
多邊形內外點判別算法是圖形學中的基礎算法,是地理信息系統空間數據分析功能的基礎。常用的典型判別方法有射線法(奇偶規則法)、角度和法(累計角度法)及非零環繞數規則法等。其中,射線法為最基本有效的方法[34-35],但其存在射線過端點、射線與邊界重合等多種奇異情況,且傳統射線法存在大量求交運算,故實際運用中常需對射線法進行改進[36-38]。謝東岑等[36]添加緩沖距離的判斷解決了傳統射線法中射線過多邊形某一邊或端點的奇異情況,實現了無人機地理圍欄越界探測。郝建強等[35]基于有向線段正負性原理改進射線法,并提出了并行算法,提高了運算效率。
在精準農業中需要對地塊進行網格劃分,以便因地制宜地收集田間狀態信息和實時變量輸入[39]。在作業過程中,作業區域的網格屬性實時更新,網格識別易同時實現種子與地塊邊界、已作業區等多區域的位置關系判斷,因此受到了廣泛關注。于英杰等[40-41]基于傳感器定位方式設計了地塊網格識別方法,適用規則與非規則地塊。魏劍濤等[19]將已作業區域劃分為若干網格,基于四分樹數據結構存儲與檢索已作業區,采用非零環繞數規則法判斷已播區域。Borut ?alik等[42]提出了基于網格法的點集在多邊形內外的方法,實現了大量點的網格判斷。
也有學者借助地理信息系統直接進行農機具與地塊位置關系判斷。孟志軍等[25]利用嵌入式GIS組件,設計了實時施肥處方圖識別算法,識別處方歸屬的時間不超過100ms。魏新華等[43]基于eSupermap 6.0 嵌入式GIS開發平臺研制的處方農作車載嵌入式信息處理系統通過坐標匹配,實現機組當前作業位置在工作空間圖中的網格識別,3km/h作業速度下的網格判別誤差約為-0.5~0.6m。劉子文等[44]在魏新華等研究的基礎上進一步將判斷誤差縮小在±0.5m以內。
在產品化方面,相關企業提供配套軟件實現地塊網格化,Ag leader[45]提供SMS軟件制作地塊電子地圖并支持處方圖制作,配套InCommand終端實現地塊網格信息識別,最終達到變量播種與區段控制的目的,如圖4所示。
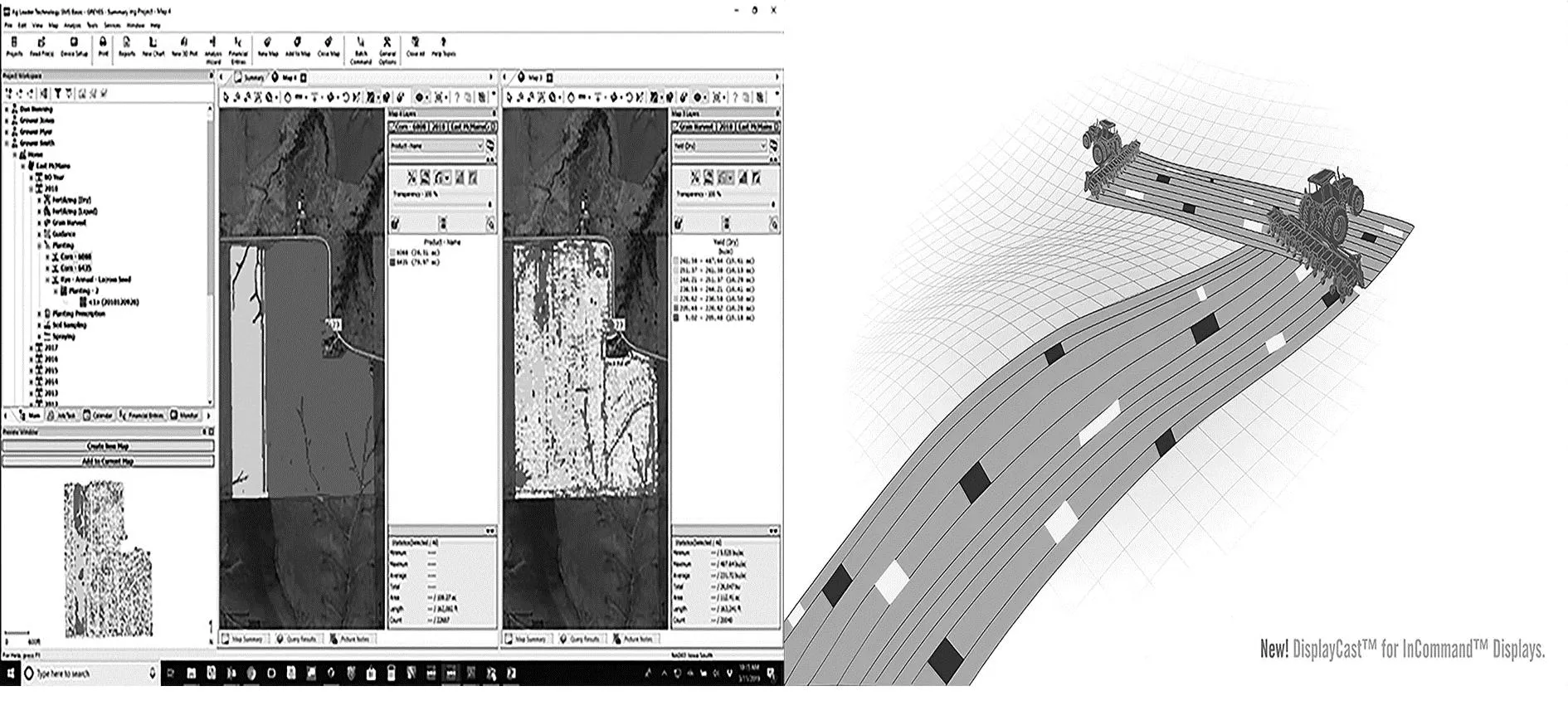
圖4 電子地圖制作與播種演示Fig.4 Ag leader map design and seeding demonstration
3 排種啟停控制
排種啟停控制是播種區段控制的重點環節,其與排種驅動方式發展密切相關。目前,排種啟停控制主要為離合器、液壓馬達、電機及調節閥4種方式。
3.1 離合器
離合器是最早的區段控制方式,主要用于具有中間傳動機構的播種機。根據安裝的位置可以實現排種器的集中、獨立控制:當安裝在動力源與中間傳動機構之間時,可以實現多個排種器的集中控制;當安裝在中間傳動機構與排種器之間時,可以實現排種器的獨立控制。Tru Count[46]的氣動離合器能實現排種控制(見圖5),充氣使通道內的頂針卡在橡膠圈內擋環上,固定在橡膠圈上的扭簧受力壓縮,連軸盤與外套脫離傳動,實現排種啟停控制。氣動離合器的執行機構小,可安裝在傳動鏈多個位置,但需要壓縮機、儲氣罐等外設,故Tru Count[46]也推出了電動離合器,改善了這一情況,如圖6所示。

圖5 Tru Count氣動離合器Fig.5 Tru Count air clutch

圖6 Tru Count電動離合器Fig.6 Tru Count electric clutch
John Deere[15]公司推出的RowCommand系統直接對柔性軸進行控制,采用低電流電動離合器控制排種動力傳遞,如圖7所示。
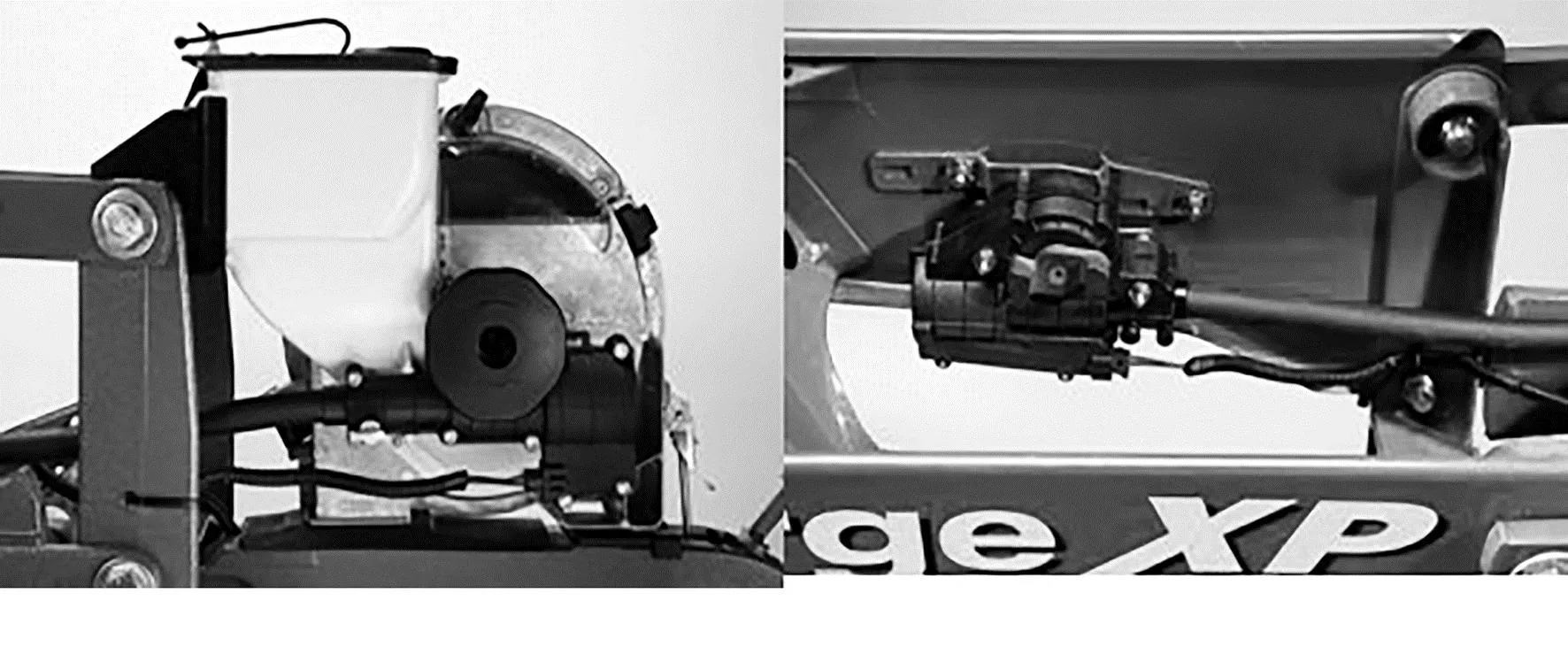
圖7 John Deere柔性軸離合器Fig.7 John Deere flexible shaft clutch
離合器采用切斷動力的方式實現排種控制,在早期區段控制中起到了至關重要的作用,但隨著播種驅動方式的改善,逐漸被替代。
3.2 液壓馬達
傳統的地輪驅動方式隨著作業速度增加,地輪滑移率及鏈傳動不穩定性都會上升[47],且株距調整不便。自20世紀80年代起,出現了液壓馬達代替地輪驅動的方案,改善了播種質量,也改變了區段控制方式。John Deere公司[48]用液壓馬達驅動主軸,通過比例流量控制,實現排種器實時轉速控制,可手動或由控制終端實現區段的獨立控制,如圖8所示。
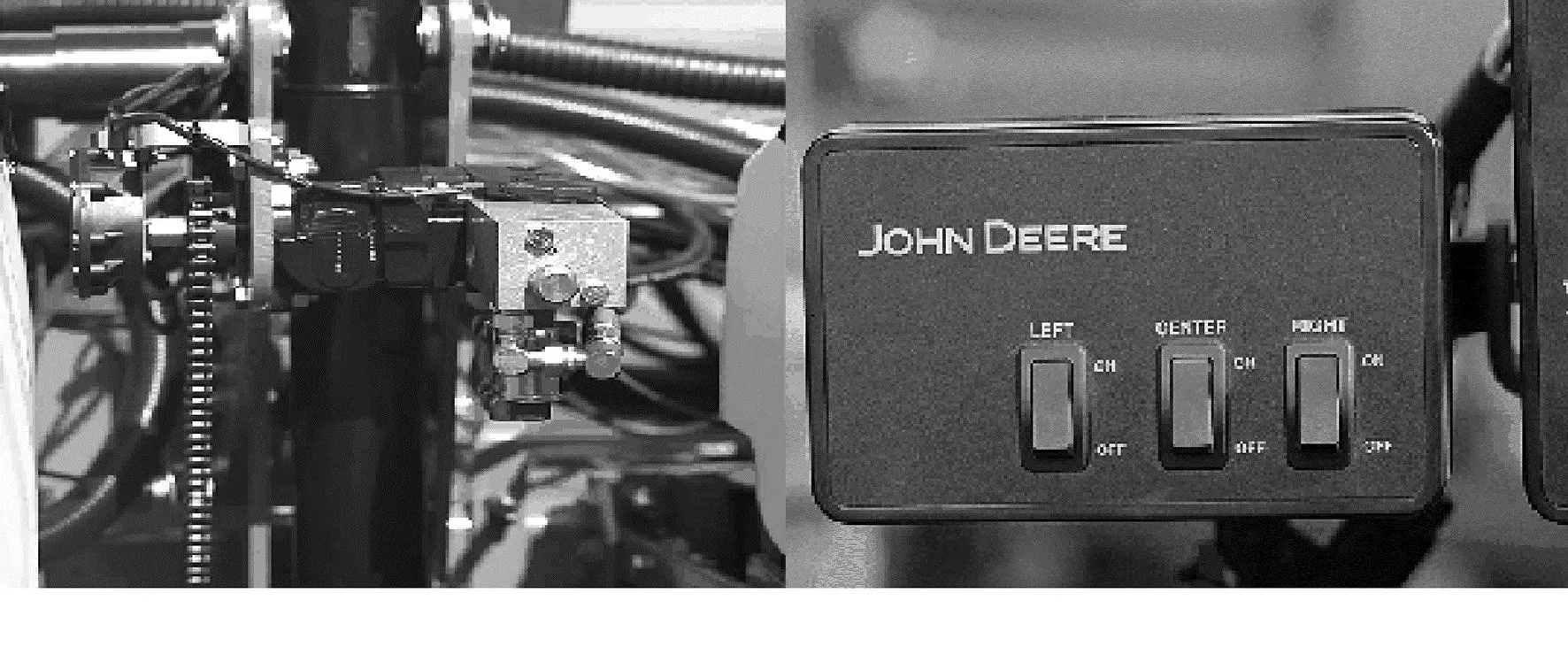
圖8 John Deere液壓馬達及區段控制Fig.8 John Deere hydraulic motor and section control mode
Raven公司[49]的OmniRow液壓馬達直接驅動中間軸,通過修改中間軸,也能實現排種器獨立控制,如圖9所示。

圖9 OmniRow液壓馬達及安裝方式Fig.9 OmniRow hydraulic motor and installation method
液壓馬達易于實現啟停控制,但需要接入液壓系統,工作過程中有較多的能量損失,維護也不便。
3.3 電機
電機相對于液壓馬達,能夠直接驅動排種器,省去了長距離中間傳動環節,具有結構簡單、體積小、控制精度高,易維護的特點,不僅能保證播種的質量,還能實現區段控制,也是變量播種的最優方案。
Precision Planting[50]針對vSet排種器推出的vDrive電機模塊,通過齒輪嚙合的方式驅動排種,縮小了排種器的整體尺寸,配合20|20 SeedSense控制器可實現區段控制功能,如圖10所示。
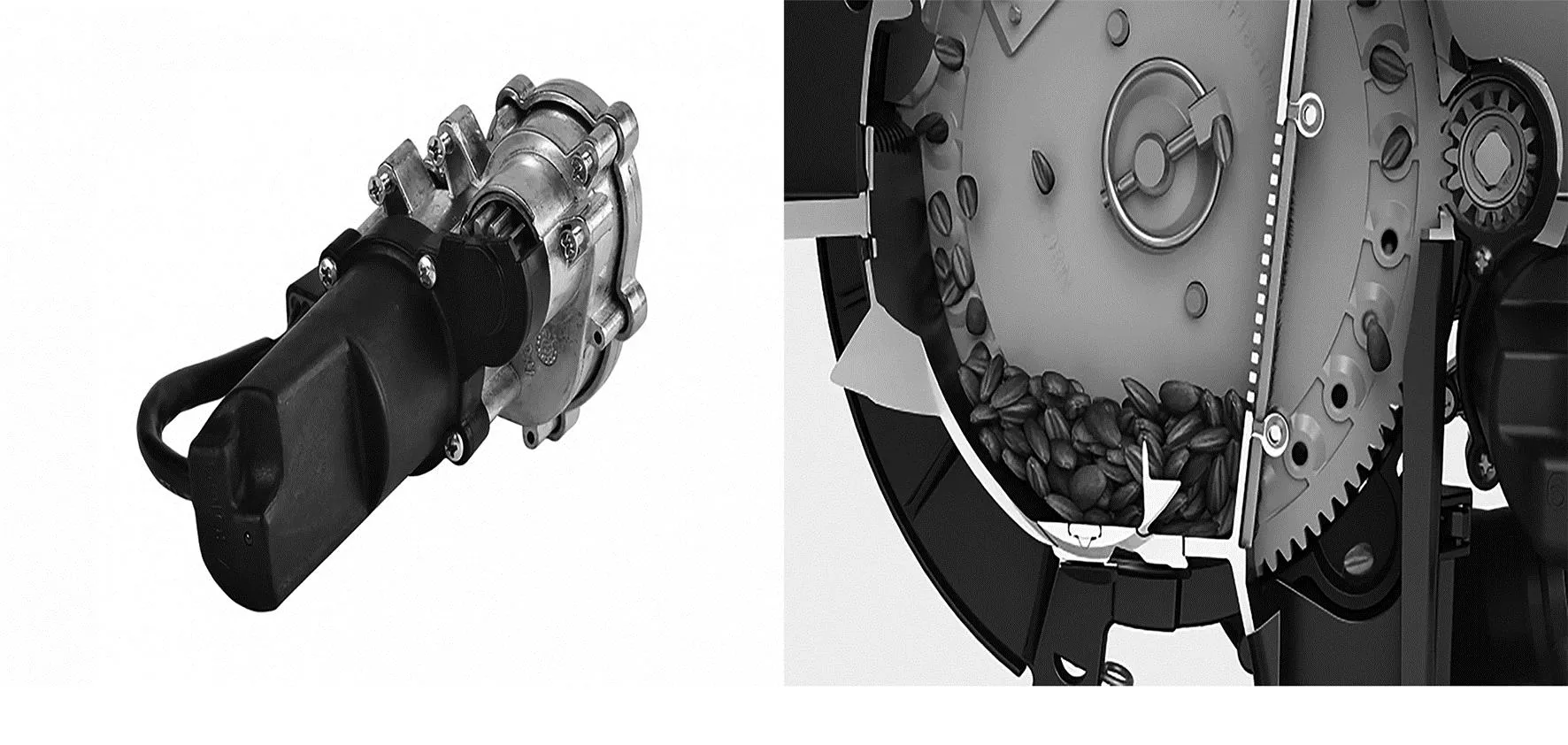
圖10 vDrive電機模塊及傳動方式Fig.10 vDrive motor module and transmission
Ag leader[51]的SureDrive電機不同于vDrive僅適配vSet系列產品,還能適配Kinze 2000/3000系列、vSet、Monosem NG4+等眾多排種器,采用鏈、齒傳動減速組驅動排種器主軸,通過SeedCommand系統實現區段控制,如圖11所示。

圖11 SureDrive電機模塊及傳動方式Fig.11 SureDrive motor module and transmission
3.4 調節閥
調節閥是以排種器特性研發的區段控制方式,主要從種子吸附、導種環節實現排種啟停控制。當前的調節閥主要針對氣力式排種器,以中央集排式排種器和氣吸式排種器居多。中央集排式排種器利用多行型孔的滾筒實現一器多行的排種方式。工作時,氣流將種子經輸種管直接拋入種床,降低了機具振動對排種的影響[52];現有的區段控制方式通過在輸種管中串入可控的調節閥,截斷種子并使其從第三通道回流至種箱,達到區段控制的目的。
Farmet[53]推出的區段控制系統,采用三通的結構,通過氣壓膨脹鼓膜停止輸種并使種子回流,如圖12(a)所示。Mc Electronic[54]設計的TCS 32電動三通閥,在不需要破壞其原有輸種裝置的基礎上,串入輸種管,通過電機旋轉實現通道改變,如圖12(b)所示。

(a)Farmet區段啟控制結構 (b)TCS 32三通調節閥結構圖12 中央集排式排種器區段控制方式Fig.12 Centralized seed-metering device section control method
氣吸式排種器依靠負壓吸附種子,排種盤旋轉種子至投種區,種子最終投入導種管中,完成排種過程。氣吸式排種器可以由地輪驅動,也可由電機、液壓馬達驅動,除前文所提啟停控制方式外,Agleader[55]推出的SureVac電動切斷器通過電磁閥驅動擋板遮擋排種盤型孔,使種子在攜種區失去負壓,種子在重力作用下回落充種區,達到停止排種的目的,如圖13所示。
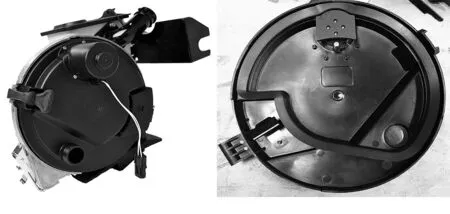
圖13 SureVac電動切斷器Fig.13 SureVac Electric Disconnector
調節閥從排種器特性入手,有效實現區段控制,尤其是改善了中央集排式排種器播行的獨立控制,但適用范圍相對單一。
4 關鍵問題
精確位置播種是玉米播種區段控制的關鍵問題,而影響精確位置播種的核心因素是定位、延時與測速方式。
4.1 定位
定位是區段控制系統感知邊界、種子位置的基礎。精確定位以RTK技術為主,能提供厘米級定位,但受地形與點狀信息的影響,定位數據存在較大的變異,當前研究與應用證明定位數據插值補償、滯后補償與地形補償能提高區段控制的精度。另外,RTK定位受環境干擾易丟失信號,需要輔以航跡推算等方法,保證在RTK信號丟失后仍能夠得到一定精度的定位數據,使區段控制能夠正常運行。
4.2 延時
延時是影響區段控制效果的重要因素,區段控制系統中定位源數據獲取、發送、解析及位置關系運算、控制模塊響應、落種等延時都會產生滯后距離。首先,獲取到的定位實際上是一個定位解算周期前的定位數據;其次,位置關系運算時間取決于算法的優劣與算力的強弱;最后,根據計算結果啟停排種器,啟停控制模塊受限于自身結構、性能特性存在響應時間,這造成了實際落種滯后于理論落種點,在高速播種時,滯后情況更為嚴重。因此,在區段控制中縮短延時,獲取準確延時是提高區段控制效果的有效方式。采用延時補償模型能較好地預估延時時間,且位置滯后補償與轉彎補償能進一步縮小滯后距離。
4.3 測速方式
測速方式直接影響速度的準確性,速度偏差將在系統延時下造成位置偏差,故高精度的測速方式是保證區段控制效果的基礎。測速方式分為基于輪速測速方式與基于地面測速方式。其中,基于輪速測速方式主要利用編碼器等傳感器測量車輪軸的旋轉速度,最終轉換為車輪線速度。由于傳感器分辨率、輪胎與地表的不同接觸狀況導致的地輪滑移、胎壓等多種因素的影響,該類測速方式并不夠準確,無法滿足高精度需求。基于地面測速方式包括GNSS、雷達及IMU,其以一固定參考點,衡量被測對象相對于參考點的速度,避免了地輪滑移的影響。其中,GNSS測速方式便捷,但受衛星信號、接收機性能的影響,存在較為明顯的延遲,輸出的速度值變異系數較大;雷達測速受田間殘茬干擾,測速精度會有所降低;IMU實時測量,瞬時測量精度高,但累計誤差大,難以滿足長時間測速需求。由于單一測速方式存在不足,組合測速方案成為了高精度測速方案的首選。
5 討論與建議
國外針對玉米播種區段控制的研究較為完善,我國玉米播種區段控制技術的研究相對滯后:一方面,國內精密播種技術起步較晚,技術相對落后;另一方面,國內人均耕地面積較少,分散、小規模作業占多數,成本回收周期長,且農民的受教育程度低,對新事物的接受能力較弱,造成了玉米播種區段控制技術難以得到發展、實踐的現狀。隨著規模化生產進程的加快,大面積集中種植將會成為常態,區段控制潛在經濟性將得到充分的體現,將推動玉米播種區段控制技術的發展。現階段我國播種作業已與農機自動導航密不可分,區段控制技術與自動導航技術存在相當多的技術共性,給國內播種區段控制技術的發展奠定了基礎。結合當前形勢與當前區段控制的發展,提出我國未來區段控制的發展趨勢:
1)在現有變量播種研究中,實現地頭邊界與已播種區的精準識別,完成區段控制與變量播種技術融合。
2)以現有保有量大的機械式播種機開展區段控制化研究,研制出低成本、高效、自動化的后裝設備,降低用戶的二次投入成本與操作難度,加快我國播種區段控制技術應用。
3)針對多系統相互獨立工作情景,開展農機自動導航、排種監測與播種區段控制等多系統協同作業的研究,進一步縮小播種重疊區域,提高播種作業效率。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(2017年4期)2017-02-06 05:27:06
故事大王(2016年7期)2016-09-22 17:30:08
照明工程學報(2016年3期)2016-06-01 12:17:56
電測與儀表(2014年1期)2014-04-04 12:00:32
兒童故事畫報(2013年3期)2013-06-24 05:40:30
