基于ADAMS的植保機操縱穩定性分析與研究
2024-01-09 02:28:50高偉周周敬東阮曉松
農機化研究 2024年1期
高偉周,周敬東,周 天,阮曉松,楊 力
(1.湖北工業大學,武漢 430068;2.湖北省農機裝備智能化工程技術研究中心,武漢 430068;3.武漢沐沃霖科技發展有限公司,武漢 430068)
0 引言
隨著農業機械化水平的提高,我國在農業機械應用領域越來越廣泛。自走式植保機的問世,提高了我國南方廣大水田植保作業效率。針對植保機在水田間作業時產生的滑轉、通過性變差、行走不穩定等問題[1-4],對植保機操縱穩定性進行分析和研究,擬建立一個恰當的植保機動力模型,以提高整機性能和控制操縱穩定性。
國內外很多研究人員對汽車、拖拉機等車輛在行駛過程中的操縱穩定性進行了大量的研究。李華師、宗光濤等通過利用多體動力學仿真軟件ADAMS對汽車的操縱穩定性進行了仿真分析與評價,得出了該型號汽車的轉向盤角階躍性能、追隨性能、躲避障礙物性能與穩態性能到達良好水平[5]。婁秀華等針對拖拉機參數化實用模型問題,使用ADAMS軟件進行仿真分析,繪制了拖拉機行駛速度、運動軌跡和轉彎半徑的相關變化曲線,為拖拉機設計和性能分析奠定了基礎[6]。劉金龍等通過使用MatLab/SIMULINK平臺建立七自由度車輛動力學仿真模型來模擬汽車的操控穩定性,能夠完成汽車的操控穩定性反映的車輛運動特性的變化[7]。Zhang Z等針對提高車輛在參數不確定且車身側滑角狀態無法測量情況下的操縱穩定性,提出了一種基于模型的車輛控制器設計方法,能有效提高車輛的操縱穩定性[8]。董紅亮通過建立包含四輪轉向和主動懸架的整車統一動力學模型,提出了一種基于車身姿態控制的四輪轉向和主動懸架的協調控制策略,并采用方向盤角階躍輸入進行仿真,研究了使用不同控制系統時的車輛極限性能[9]。以上的研究人員針對車輛模型建模和操縱穩定性評價做出大量的研究,汽車動力學仿真技術也得到了廣泛的應用,但對自走式植保機整車操縱穩定性方面研究較少。
為此,考慮到植保機結構系統與汽車結構系統極為相似,利用ADAMS動力學仿真軟件對自走式植保機的操縱穩定性進行仿真分析與評價,能夠基本反映自走式植保機在不同行駛工況下的操縱穩定性能,對植保機動力學分析研究及提高操縱穩定性能具有一定的指導作用。
1 操縱穩定性理論分析
車輛的操縱穩定性是指通過操作員在特定的路面與環境下的多次行駛表現出來的性能,穩定性的好壞直接影響著操縱性的好壞,也影響著車輛的工作性能[10]。自走式植保機是否具備良好的操縱穩定性,應從穩態回轉響應、直線加減速行駛及轉向盤角階躍輸入等方面性能來考慮。
1.1 直線行駛工況狀態
自走式植保機在水田作業過程中,直線行駛是常有的工作狀態,包括車輪加減速和勻速行駛狀態。為了把握植保機操縱穩定性的基本特性,把植保機結構簡化成一個前后有側向彈性的輪胎支撐于地面且具有側向和橫擺運動的二自由度車輛模型[10],主要考慮以下幾個評價指標:
速度評價指標[10-11]為
(1)
式中u(t)—汽車縱向速度(m/s);

tn—試驗時間(s)。
縱向加速度指標[10-11]為
(2)
式中ax(t)—縱向加速度(m/s2);

動力性能總指標[10-11]為
(3)
式中ωU、ωAx—加權值。
響應性能評價指標[10-11]為
(4)
式中ax(t)—縱向加速度(m/s2);
Trp—油門開度(mm);

1.2 角階躍工況行駛狀態的穩態響應
自走式植保機在轉彎的情況下,駕駛員打方向盤給前車輪一個轉彎角度,在前輪角階躍輸入下產生的車輛穩態響應,采用穩態橫擺角速度增益(轉向靈敏度)來評價穩態響應,即穩態時的橫擺角速度與前輪轉角之比[10]。
穩態橫擺角速度增益[10-11]為
(5)
式中K—穩定性因數;
L—前后兩車輪相距長度(mm);
u—質心速度V于t時刻在橫向的位移分量(m/s)。
1.3 角階躍工況行駛狀態的瞬態響應
當給自走式植保機前車輪一個角階躍輸入后,過渡過程中自走式植保機的橫擺角速度響應為ωr(t)。那么,影響瞬態響應的主要因素有[11]:橫擺角速度ωr,波動時的固有頻率ω0,阻尼比ζ,反應時間τ,達到第一峰值ωr1時的時間ε等。
橫擺角速度響應ωr(t)[10-11]為
(6)
式中m—自走式植保機質量(kg);
k2—相關系數;
Φ—偏位角度(o)。
2 建立整車模型
利用ADAMS/Car建立自走式植保機的整車虛擬樣機模型,由于Car模塊的建模環境分為模板建模器和標準模式兩種,該虛擬自走式植保機樣機可以拆分為車身系統、懸架系統、轉向系統、動力傳動總成系統及前后輪胎系統等幾類系統[5,9-12]。在建模型時,根據山東眾和3WPHS-600A型自走式植保機的數據參數適當地修改ADAMS軟件所具有的子系統模板,完成每個子系統的建立,最后把子系統裝配成植保機整車模型,如圖1所示。
圖1 植保機整車模型Fig.1 Whole vehicle model of plant protection machine
利用ADAMS/Car建立的整車模型依據3WPHS-600A型植保機參數[13-14],如表1所示。

表1 植保機整車關鍵參數Table 1 Key parameters of plant protection machine
3 操縱穩定性仿真試驗
3.1 直線行駛運動工況下的仿真分析
直線行駛是自走式植保機常見運動狀態。在ADAMS/Car軟件中創建驅動,選取水田路面模型,進行多次調試[15]。自走式植保機先進行加速行駛,縱向速度變化如圖2所示。穩速行駛一段時間后再減速行駛,縱向速度變化如圖3所示。
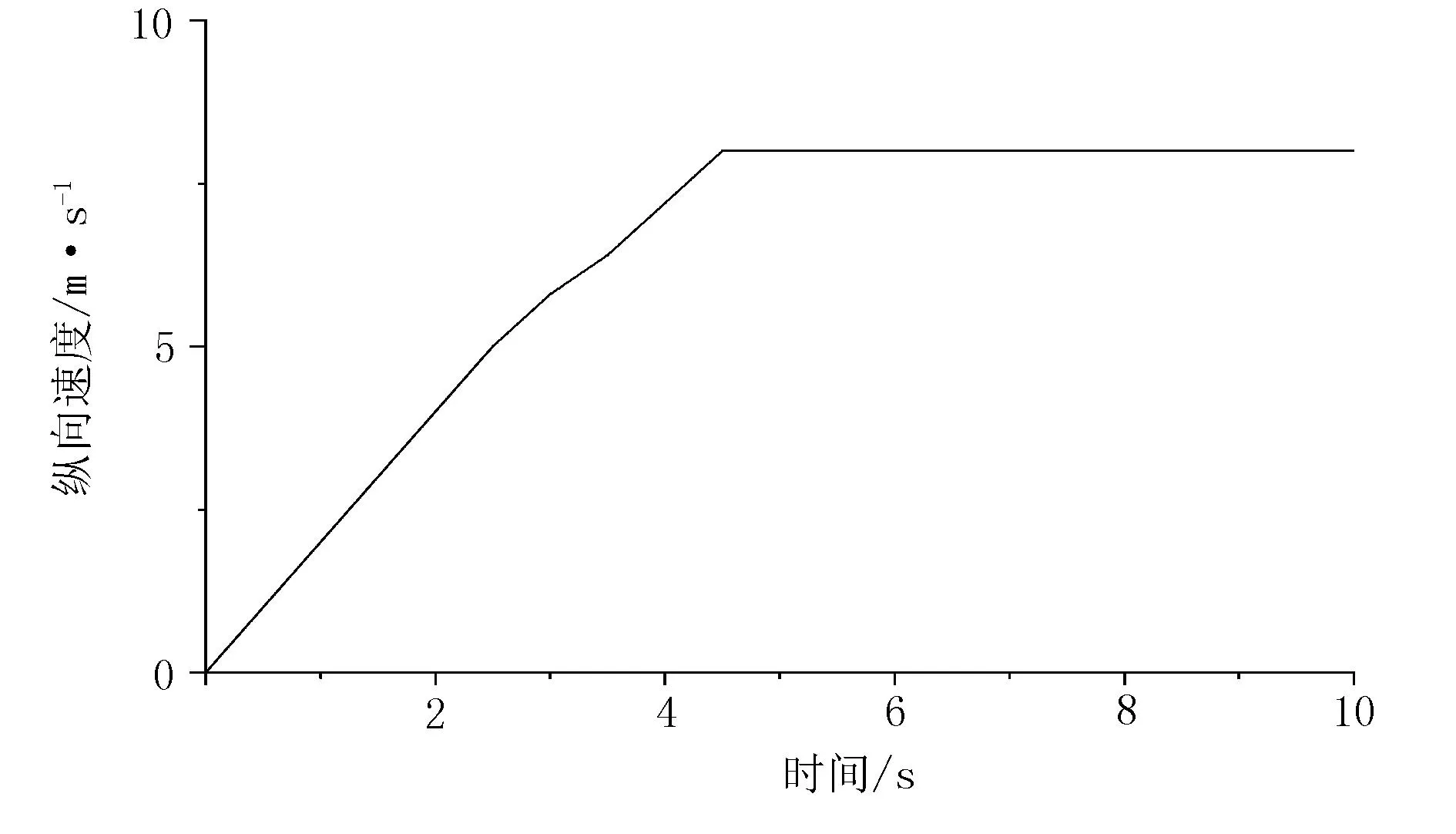
圖2 加速下的縱向速度變化Fig.2 Longitudinal velocity change under acceleration

圖3 減速下的縱向速度變化Fig.3 Longitudinal speed change at deceleration
由圖2可以看到:自走式植保機整車在驅動力的作用下,做加速直線行駛,4s后車速度逐漸穩定在8m/s,繼續前行。由圖3可以看到:自走式植保機在初速度為8m/s時,開始減速,一段時間后,制動力矩逐漸減小,大約在4.5s時,速度減為0,停止行駛。仿真結果表明:自走式植保機在直線行駛工況下,速度很快達到穩定值,又可在穩速行駛的情況下,整車速度不斷減小直至為零,有較好的加減速穩定特性。
3.2 轉向盤角階躍工況下的仿真分析
轉向盤角階躍試驗是指給正在前進的植保機一個轉向盤角階躍信號輸入,同時監測橫擺角速度、側向加速度、車身側傾角等值的變化趨勢[16-19]。在ADAM/Car軟件中,模擬自走式植保機以穩定的速度在路面上行駛前進,給轉向盤一個角階躍輸入后,進行仿真,在后處理界面可以看到橫擺角速度、側傾角等參數的響應狀況[20]。
選取不同的車速,仿真時間為5s,初始轉角為0°,最終轉角為20°,設定1s時角階躍信號發生響應。仿真后,橫擺角速度響應曲線如圖4所示。車身側傾角響應曲線如圖5所示。

圖4 橫擺角速度響應曲線Fig.4 Yaw rate response curve
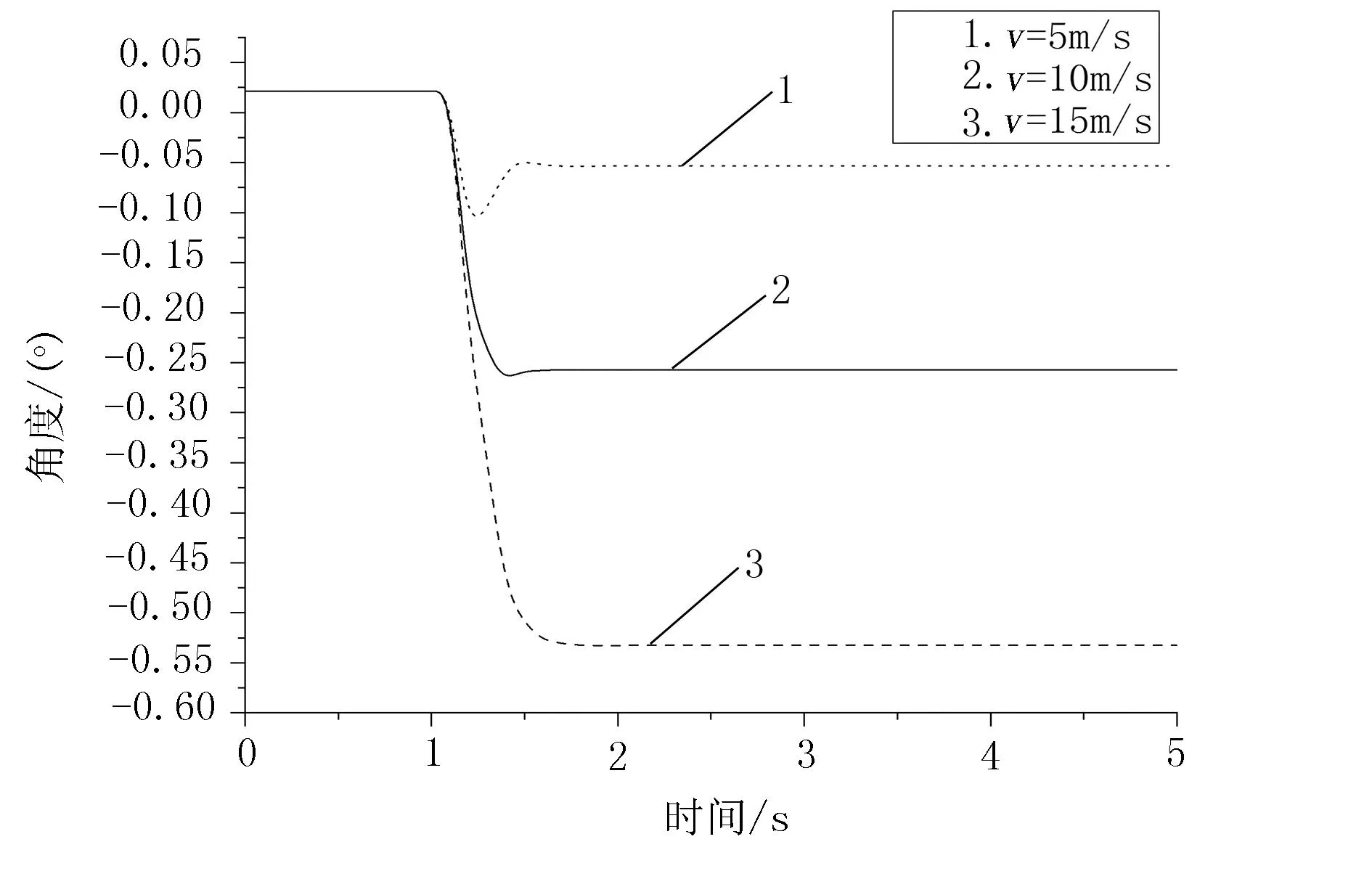
圖5 車身側傾角響應曲線Fig.5 Body roll angle response curve
由圖4可以看到:車速為10m/s時,植保機的橫擺角速度到達穩定值所花費的時間少于其它兩類車速,穩定時間約為1.325s,橫擺角速度的超調量也比較小;隨著速度的不斷增加,橫擺角速度的反應時間在減少,但穩態響應所需要的時間在增加。因此,自走式植保機的穩定性因數K>0。
由圖5可以看到:車身側傾角隨著車速的變化而不斷發生變化,在車速為10m/s時,趨向穩態值所需時間最少;隨著車速的不斷增加,車身側傾角度逐漸變大,最后也趨向了穩態狀況。
3.3 蛇形線試驗工況下的仿真分析
蛇形試驗方法主要用來研究汽車或植保機等車輛瞬態閉環響應特性,能檢查車輛在接近側滑或者側翻工況下的操縱穩定性能的好壞, 也可以用來綜合評價車輛行駛穩定性[5]。根據國家標準GB/T6323.1-94規定的蛇形試驗的基準,標樁間距是30 000mm,基準車速為10m/s[5]。在仿真試驗中,按給定的初速度10m/s進行仿真試驗,同時采集方向盤轉角、側向加速度、橫擺角速度、車輛軌跡等參數的變化趨勢[21-22]。車速設定為10m/s時的仿真結果,如圖6所示。
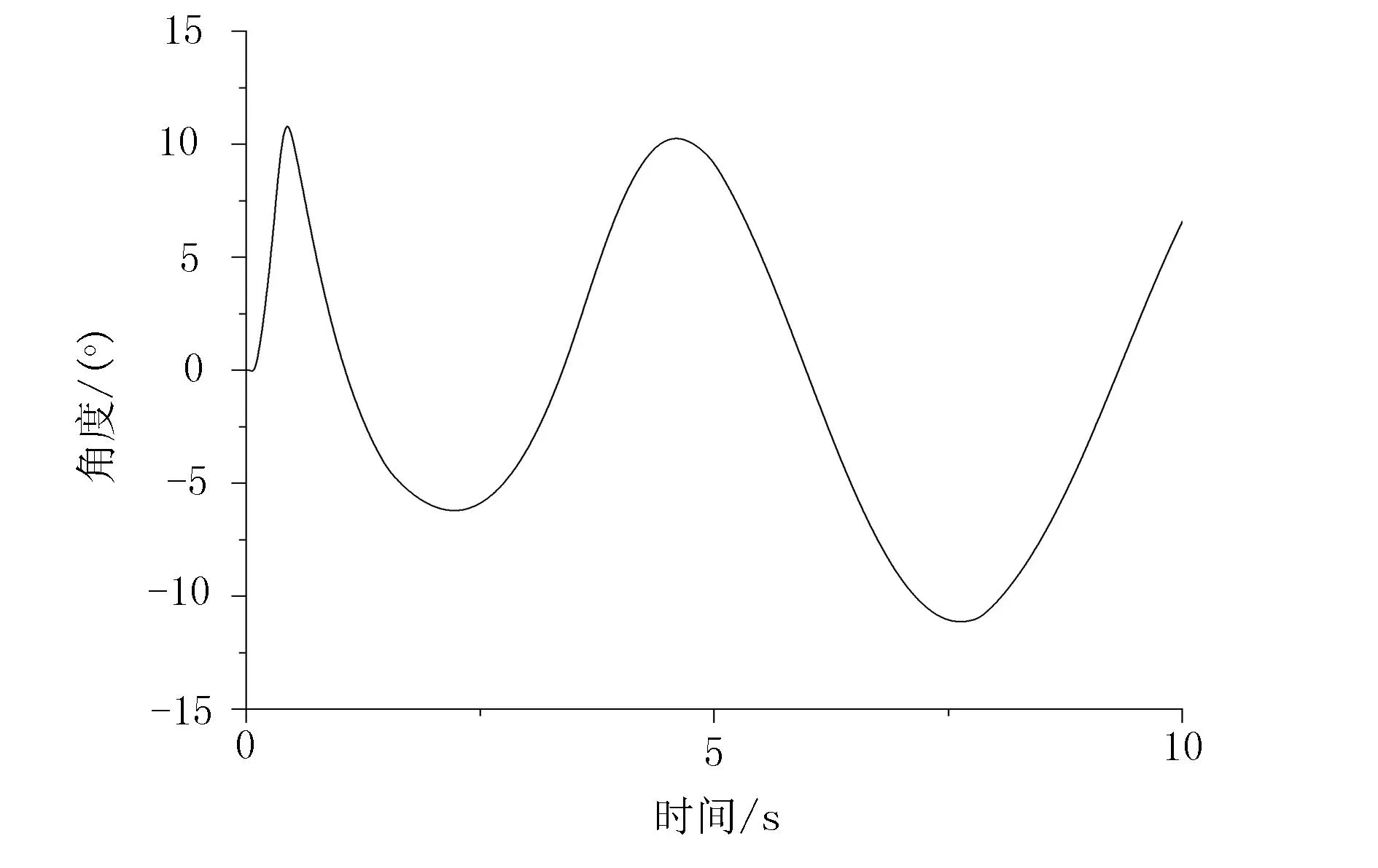
(a)方向盤轉角
(b)車輛軌跡

(c)橫擺角速度響應
(d)側向加速度響應圖6 車速10m/s時蛇形線試驗仿真曲線Fig.6 Simulation curve of serpentine test at 10m/s
由圖6可以看出(加速度g=9.8m/s2):自走式植保機在車速為10m/s時能正常通過提前設置的軌跡路線,表明具有較好的追隨性能。
3.4 穩態回轉試驗仿真分析
穩態回轉試驗用來評價整車的不足和過多的轉向特性,固定轉向盤轉角分為連續加速和定轉彎半徑的兩類試驗方法。為了能得到更加準確的仿真結果,依據ISO4138-82標準,使用固定轉向半徑進行不斷加速的方法進行仿真[5]。在仿真試驗前,設置轉彎半徑為30m,初始速度為5m/s,最后速度為15m/s,左側轉向方式,仿真時間為90s。仿真試驗過程中,讓自走式植保機沿著定值轉向半徑進行圓周運動,不斷加速,根據圓周半徑大小隨時使用方向盤調整轉角,讓自走式植保機有最大的側向加速度;仿真過程中不斷觀察并收集自走式植保機的質心軌跡、車輪速度變化、側向加速度等參數變化趨勢,根據收集結果進行分析。仿真結果如圖7所示。
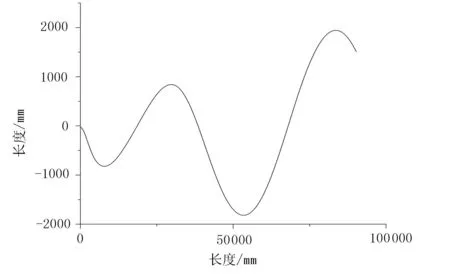
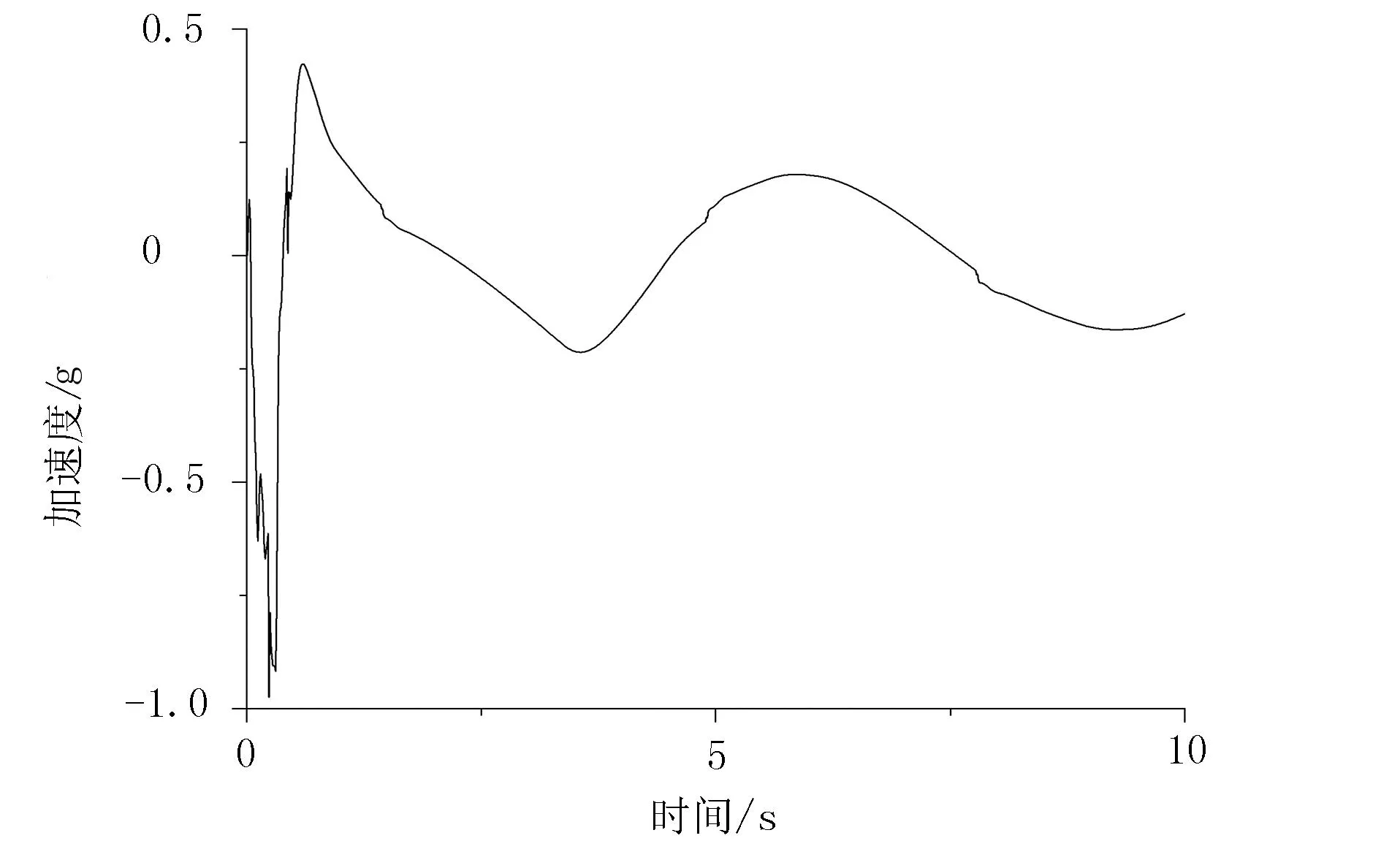
由圖7(a)可以看出:自走式植保機在車速不斷增加的情況下, 能在已設置好的固定圓周軌跡上行駛,車速增加但仍然保持在回轉路徑軌跡上。由圖7(b)可以看出:自走式植保機在回轉半徑的限制下,從初始速度開始提速,在預先設定的時間內,車速度增加到已設定的最終速度,完成穩態回轉。由圖7(c)可以看出(加速度g=9.8m/s2):自走式植保機的加速度處于反向增加趨勢,符合車輪左側方向(逆時針)回轉運動條件。
4 樣機試驗
為驗證操縱穩定性仿真結果的正確性,在3WPHS-600A型自走式植保機上安裝方向盤轉角傳感器、數據采集器、光學測速儀等零部件,讓植保機在水田環境和車輪懸空狀態進行試驗驗證,如圖8所示。

(a)質心軌跡曲線
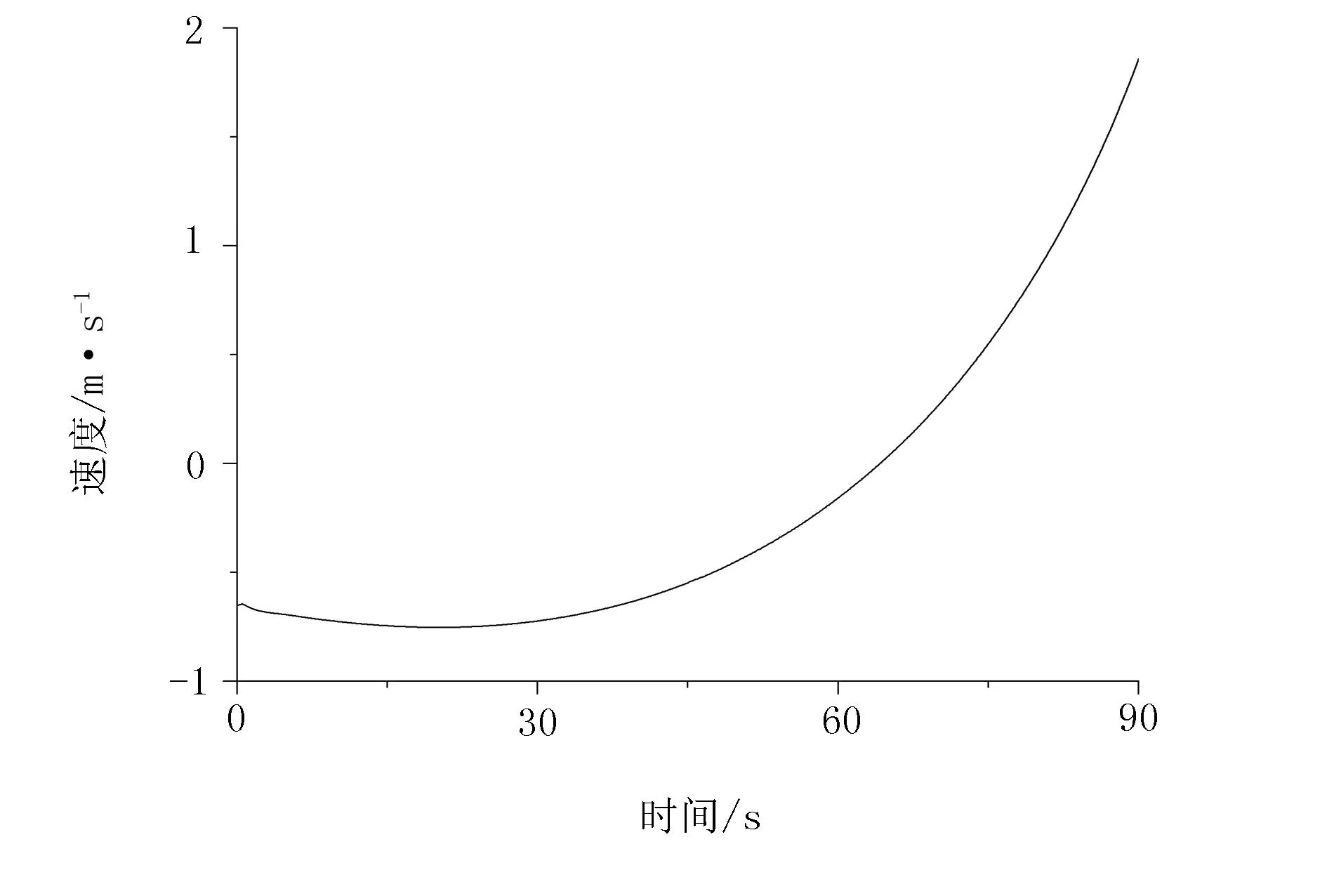
(b)側向車速變化圖
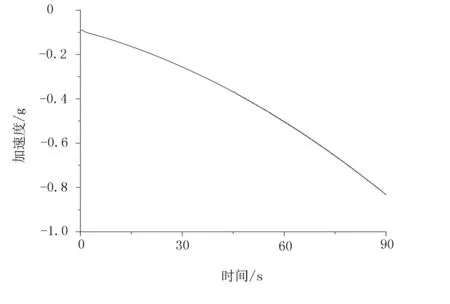
(c)側向加速度變化圖圖7 圓周回轉試驗仿真曲線Fig.7 Simulation curve of circular rotation test

圖8 整車試驗Fig.8 Vehicle test
仿真車輛軌跡與實車車輛軌跡變化對比,如圖9所示。

圖9 車輛軌跡變化對比圖Fig.9 Comparison diagram of vehicle trajectory change
通過實車試驗與仿真試驗結果對比可看出:兩者在趨勢變化方面結果達到基本吻合。由于整車試驗受到路況質量、天氣和操作等實際因素的影響,直線行駛運動、轉向盤角階躍工況等試驗結果會出現稍微突變,但與仿真試驗的變化趨勢是一致的。因此,所建立的自走式植保機多體仿真模型可以較為準確地分析與評價實車的操縱穩定性。
5 結論
針對自走式植保機操縱穩定性的分析與評價,通過采用ADAMS軟件中的Car模塊建立模型,設置了不同的車速對轉向盤角階躍、直線加減速行駛、圓周回轉等試驗進行了仿真和實車試驗驗證。結果表明:自走式植保機的車速為10m/s時,操縱穩定性較好。研究結果為提高植保機的操縱穩定特性和動力分配控制系統優化奠定了基礎。
