新能源純電動四驅農機電機控制系統研究
2024-01-09 02:25:06付亦凡
農機化研究 2024年1期
付亦凡
(河南省理工中等專業學校,鄭州 450008)
0 引言
近年來,隨著機械化技術和電子技術的高速發展,各式各樣的電機開始被應用到這個控制領域。傳統的直流電機功耗大、效率低,若應用在純電動農機上,會提高車輛耗電量;而直流無刷電機的優點是效率高和壽命長,工作效率可以達到96%以上,比傳統電機高,且使用壽命在2萬h以上,遠遠高于傳統電機。為此,提出了一種基于直流無刷電機的純電動四驅農機電機控制系統,對純電動農用車輛的發展具有積極意義。
1 建立農機直流無刷電機模型
1.1 無刷直流電機數學模型
為了充分考慮直流無刷電機分析的準確性,假設以下條件都成立:
1)忽略該電機繞組電樞反應;
2)三相繞組完全對稱分布;
3)忽略該電機換相中的齒槽影響;
4)假設無刷直流電機內部的電阻、電感和互感都相同。
根據這幾個假設條件,會存在以下表達式
La=Lb=Lc=L
(1)
Ra=Rb=Rc=R
(2)
Lab=Lac=Lbc=Lba=Lca=Lcb=M
(3)
其中,Li和Ri分別表示電機電阻和電感(i=a、b、c);Lab、Lac、Lbc、Lba、Lca、Lcb為電機之間的互感。
根據式(1)~式(3),可以求解出無刷直流電機相位電壓計算公式,即
(4)
其中,Vi和ii表示直流無刷電機三相定子繞組電壓和電流;L和M表示直流無刷電機繞組電感和繞組間的互感;ei表示電機反動電勢;R為無刷直流電機內部電阻。
直流無刷電機內部電路可以簡化為如圖1所示。

圖1 直流無刷電機內部簡化電路Fig.1 The simplified internal circuit of brushless DC motor
直流無刷電機內部電流關系為
ia+ib+ic=0
(5)
直流無刷電機內部轉矩和運動關系為
(6)
(7)
其中,Ω、B、J和Tl分別為其角速度、阻尼系數、轉動慣量和負載轉矩。
1.2 直流無刷電機工作原理
直流無刷電機是利用霍爾傳感器檢測電機內部轉子信號,對電機換相過程進行準確控制,也就是根據轉子的位置信號,驅動控制導通逆變器的MOS功率管,讓電機根據設定需求進行工作,提高電機轉動的準確性。直流無刷電機工作原理如圖2所示。

圖2 直流無刷電機工作原理圖Fig.2 The working principle diagram of brushless DC motor
直流無刷電機的工作方式分為兩兩導通和三三導通,是指在某一個時間點有2個或者3個MOS功率管同時導通。在實際應用中,兩兩導通比三三導通能獲得更大的轉矩,穩定性和功率輸出都是最好的狀態,故采用兩相導通星形三相六狀態模式,比較簡單,性能也很穩定。
2 純電動四驅農機電機控制系統硬件設計
2.1 純電動四驅農機電機控制系統硬件組成
純電動四驅農機電機控制系統是對4臺直流無刷電機進行控制,TMS320F2812 ARM微處理器內部是并行電路,可以通過多個控制單元對多個獨立電機進行實時驅動控制。以一個直流無刷電機驅動控制系統為例,其主要包括控制和驅動兩部分:控制部分主要是實時對電機的速度和位置信號進行檢測處理,并根據電機速度和旋轉方向對電機進行精確控制;驅動部分是執行單位,主要通過MOS功率管實現弱電對強電的驅動控制。
基于TMS320F2812 ARM微處理器的直流無刷電機原理如圖3所示。其中,控制部分由TMS320F2812處理器、AD轉換電路和串口通信電路組成,主要包括電機速度、電流和位置等數據信息的采集及PWM控制信號的輸出;驅動電路采用光電隔離電路、MOS功率管驅動電路和由霍爾元件組成的電機轉子位置檢測電路。
2.2 純電動四驅農機電機驅動電路設計
驅動部分是純電動四驅農機電機控制系統的執行機構,其功率驅動電路實現弱電對強電的隔離控制。驅動電路主要由MOS功率管、光電隔離器件及霍爾元件等組成。
1)MOS功率管驅動電路。為了保證對直流無刷電機的驅動能力,采用飛利浦公司的N型半導體場效應管IRF830,最高工作電壓為500V,最大允許電流為5.9A,導通時漏極和源極之間的電阻小于1.5Ω,且開關速度非常快,適合應用在電機控制系統中。
在實際電機驅動過程中,一般需要采用橋式電流對電機進行驅動,還需要將控制電路輸出的脈沖進行放大,達到驅動場效應管IRF830的水平。因此,選擇IR2304 MOS管集成驅動芯片,實現對電機的驅動。MOS功率管驅動電路如圖4所示。

圖3 純電動四驅農機電機控制系統原理框架圖Fig.3 The simplified internal circuit of brushless DC motor

圖4 MOS功率管驅動電路原理圖Fig.4 The schematic diagram of MOS power transistor drive circuit
2)電機電流采樣電路。電流采用包括電阻和電流傳感器兩種方法。在此,采用電阻檢測電流,是將采樣電流轉換成電壓轉給ADC模塊,實現電流信號轉換為電壓信號的方法,邏輯簡單,成本較低。
直流無刷電機的電壓較大,而微處理器和ADC器件工作電壓的較低,因此需要將電流轉換為0~5V范圍的電壓值。直流無刷電機電流采樣電路如圖5所示。
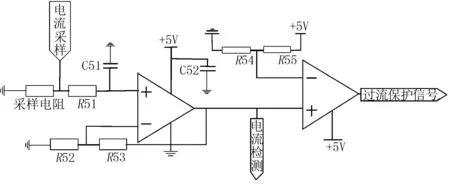
圖5 直流無刷電機電流采樣電路原理圖Fig.5 The schematic diagram of current sampling circuit of brushless DC motor
圖5中,通過采樣電阻和R51兩個電阻實現對電機電流的采樣,再將電壓值進行放大處理后送給ADC轉換電路進行檢測,最后digital的電壓信號被送給微處理器進行分析和處理。
3)轉子位置檢測電路。直流無刷電機轉子位置采用霍爾傳感器進行檢測,該傳感器安裝在電機內部,由電源和低和3條信號線組成。由于直流無刷電機內部干擾嚴重,進行霍爾傳感器采集到的信號需要進行RC濾波;另外,電路增加了一個高速光耦6N137對霍爾傳感器進行抗干擾處理。基于霍爾傳感器的轉子位置檢測電路如圖6所示。

圖6 基于霍爾傳感器的轉子位置檢測電路原理圖Fig.6 The schematic diagram of rotor position detection circuit based on Hall sensor
3 純電動四驅農機電機控制策略研究
通過前面對電機驅動系統的分析,可以建立純電動四驅農機電機控制模型,將純電動四驅農機看做一個整體,將農機車速作為控制對象,建立如圖7所示的農機電機控制模型。

圖7 純電動四驅農機電機控制模型Fig.7 The motor control model of pure electric four-wheel drive agricultural machinery
由圖7可以看出:該模型實際上需要對電機車速偏差采取控制策略。電機驅動的方法很多,模糊PID控制技術應用廣泛,且具有較好的穩定性,故采用該方法實現對系統的控制。
在此,采用基于純電動四驅農機的增量式PI控制算法,將傳感器測量的實際車速和司機給定的目標車速進行對比,得到速度偏差e;電機控制系統依據e進行增量式PI控制算法,得出速度增量信號△,并將其計算后進行脈寬調制后輸出PWM波;驅動功率電路實現對電機轉速的控制,從而實現對整車速度的調整控制,達到司機操控目的。其控制流程如圖8所示。
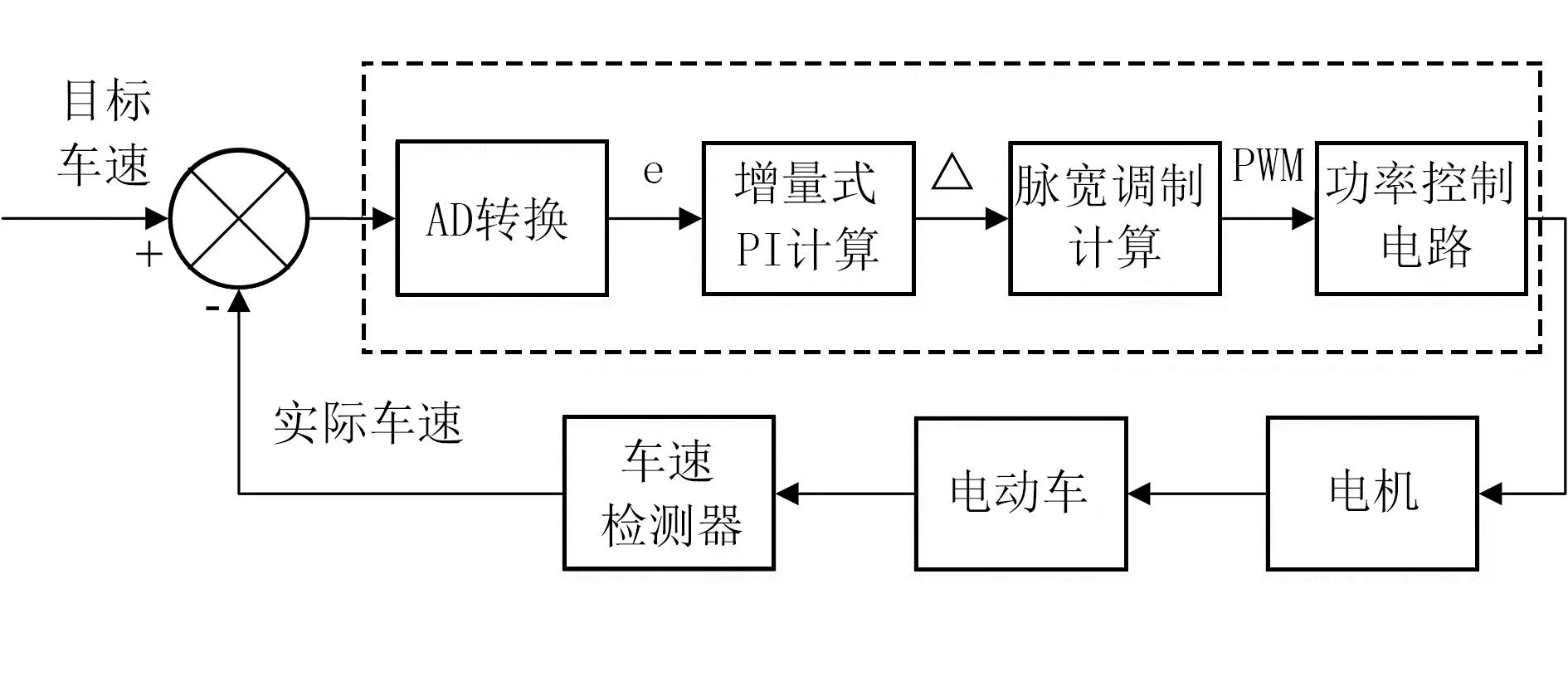
圖8 電機控制流程圖Fig.8 The schematic diagram of current sampling circuit for brushless DC motor
在農機作業過程中,司機通過“電門”裝置給電機控制系統一個與車速成正比的電壓信號,并設置該電壓信號為控制量。增量控制的表達式為
u(k)=u(k-1)+Δu(k)
(8)
Δu(k)=K0e(k)+K1e(k-1)
(9)
其中,u(k)和e(k)分別為農機第k采樣時刻的農機車速信號值和偏差值;K0和K1為常量。
根據式(8)、式(9),假設農機加速裝置給出的目標信號為v0,車速傳感器測得車速為vk,第k次的車速偏差為e(k)=vk-v0(k);同理,計算出e(k-1)。在計算出e(k)前,先保留e(k-1),并以e(k)和e(k-1)作為輸入,計算出增量Δu(k),計算出脈寬調制計算值。純電動四驅農機電機控制策略流程如圖9所示。

圖9 純電動四驅農機電機控制策略流程圖Fig.9 The control strategy flow chart of pure electric four-wheel drive agricultural machinery motor
4 實驗結果分析
為了檢測純電動四驅農機電機控制系統的實際效果,將該系統移植到純電動四驅農機上,并對控制速度進行了實際的跟蹤實驗。實驗中,駕駛員設定電機電機轉速為2000r/min,保持一段時間后下降至1500r/min,主要是測試電機轉速控制的實時性。經過實際測試后。測試結果如圖10所示。

圖10 轉速相應測試結果圖Fig.10 The test result chart of revolution speed
由圖10可以看出:在駕駛員的控制下,純電動四驅農機電機轉速能實現不同數值的平穩過渡,速度跟蹤效果良好,證明了整個系統的穩定性和可靠性。
5 結論
建立了農機直流無刷電機模型,設計了純電動四驅農機電機控制系統硬件部分,采用增量式PI控制算法,實現了純電動四驅農機電機控制策略。實際測試表明:在駕駛員的控制下,純電動四驅農機電機轉速能實現不同數值的平穩過渡,其速度跟蹤效果良好,證明了整個系統的穩定性和可靠性。
