面向對象技術的智能插秧機控制系統設計研究
2024-01-09 02:28:18史麗麗
農機化研究 2024年1期
史麗麗
(鄭州升達經貿管理學院 信息工程學院,鄭州 451191)
0 引言
插秧機作業過程中經常出現動力不足現象,影響插秧作業效率;同時,由于插秧作業人員水平差異,無法保證插秧質量穩定性。在實際插秧過程中,水田土壤具有較大的差異性,往往導致秧苗行距和株距均存在較大的波動,影響后期植保作業效率[1-3]。精準化無人駕駛插秧智能控制系統,能夠有效提高插秧作業的直線度和插秧作業效率[4]。為此,以插秧作業過程中插秧機橫向偏差和航向偏差為控制對象,基于面向對象技術設計了一種智能插秧機控制系統。
1 插秧機控制系統總體設計
插秧機智能控制系統的本體是插秧機,其作業精度和穩定性會受到環境因素的影響。因此,在智能控制系統設計過程中,要考慮作業過程安全性和穩定性,保留插秧機本體原有結構,避免插秧機功能受到干擾。插秧機智能控制系統在設計過程中所選擇的傳感器行程和精度要求能夠滿足作業需求,保證插秧作業過程的直線度和精度;智能控制系統要求具有人工操作和自動操作兩種不同的工作模式[5-6]。表1所示為插秧機本體主要性能參數。

表1 插秧機本體主要性能參數Table 1 Main performance parameters of transplanter body
插秧機智能控制系統硬件要求能夠在作業過程中對相關環境信息進行實時采集,保證插秧作業過程順利進行,其硬件主要包括信息獲取、控制策略及執行子系統[7-8],如圖1所示。
插秧機智能控制系統主要包含插秧導航功能模塊和插秧機行進作業控制功能模塊[9]。其中,插秧機行進作業控制模塊包含行進控制、轉向控制及插秧作業控制;插秧導航模塊以插秧機為控制對象,建立插秧機運動學模型,制定導航作業過程中的跟蹤控制策略,同時對控制系統的穩定性和動態特性進行分析,對控制參數進行動態調整,以滿足插秧機行進過程中的誤差要求[10]。

圖1 插秧機智能控制系統總體框架示意圖Fig.1 Overall framework diagram of intelligent control system of transplanter
2 插秧機控制系統硬件設計
插秧機智能控制決策系統是系統硬件平臺核心,利用算法將獲取到的相關環境參數進行計算分析和傳遞,由主控制器、繼電器及其他控制裝置組成[11]。在控制作業過程中,主控制器將實時獲取到的相關環境參數信息、插秧機行進姿態信息及轉角信息傳輸至繼電器,驅動插秧機執行機構,從而實現插秧機作業過程路徑實時調整。
插秧機實際作業過程中,要求具有較好的實時性,能夠快速對相關信息進行分析處理,同時要求設備具有較低的成本。綜上所述,智能控制系統選用STM32型數據處理電路板[12]。在作業過程中,數據處理電路板實時獲取插秧機的相關位置信息、航向姿態信息、轉角及行進速度信息,對各種參數信息進行分析處理后,實現插秧機相關執行機構的自動化智能控制,同時能夠根據相關插秧需求,對插秧株距進行調整,完成智能插秧作業過程[13]。
插秧機作業控制過程中,主控制器電路板將輸出信號傳輸至繼電器,驅動相關執行機構動作,因此繼電器在控制過程中用來進行信號隔離、信號切斷及大功率負載[14]。表2所示為繼電器相關性能參數。
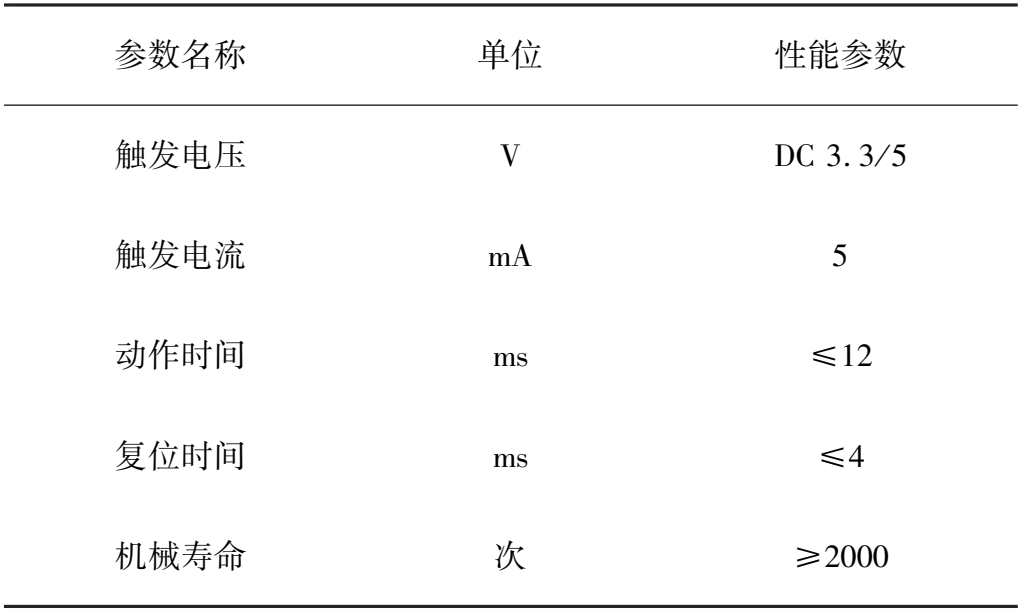
表2 繼電器性能參數Table 2 Relay performance parameters
插秧機智能控制系統要求能夠進行自主導航和自動駕駛,插秧作業過程中完全實現自動化,同時要求能夠對插秧過程中的行進速度、行駛誤差及行駛狀態進行實時監測,并反饋至控制系統主電路,達到穩定控制的目的[15]。圖2所示為智能插秧機整機框架圖。
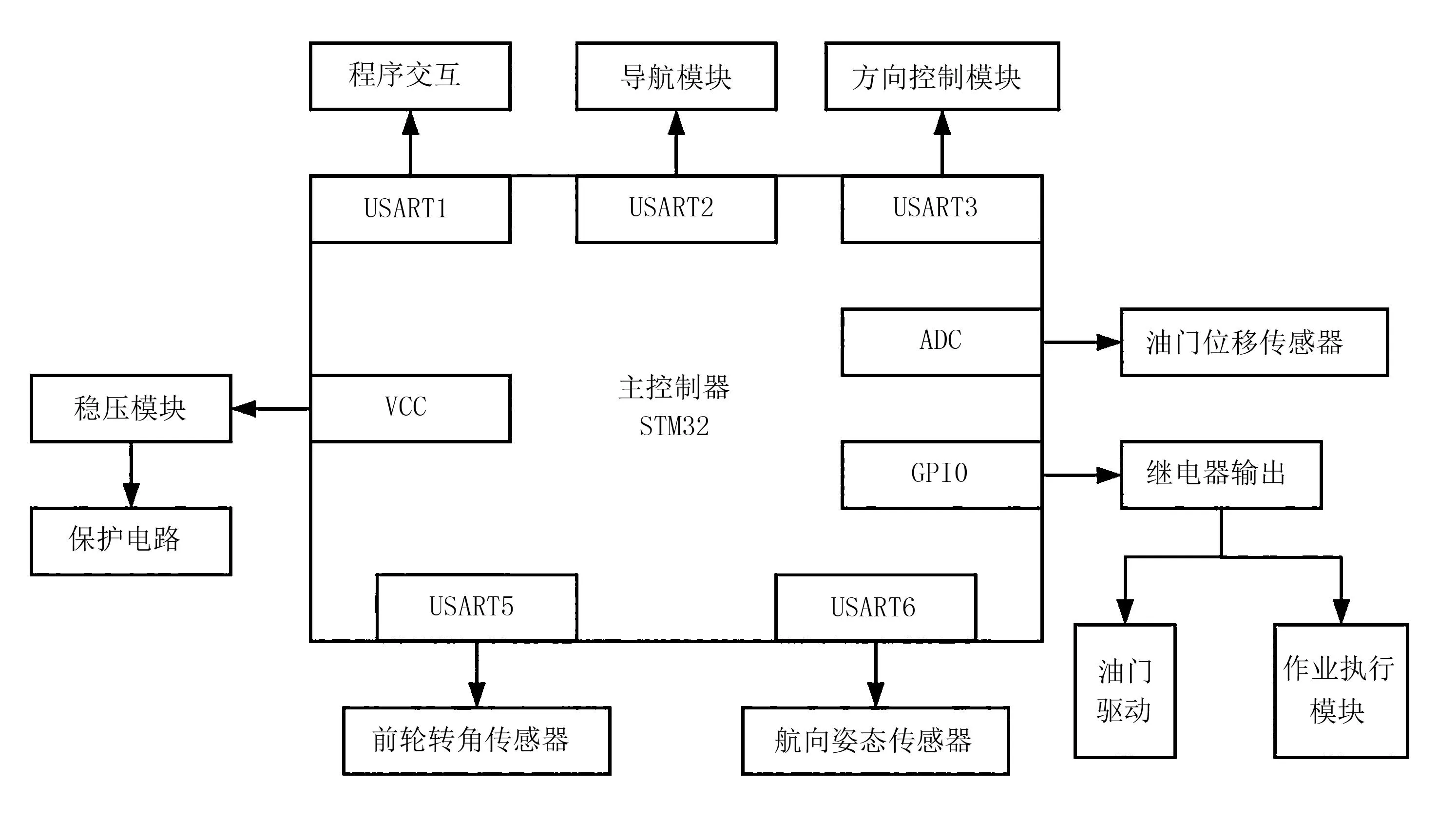
圖2 智能插秧機整機框架Fig.2 Frame of intelligent transplanter
3 智能控制策略分析
插秧機本體是一種四輪驅動的作業車輛,依靠前輪進行轉向,建立以作業車輛后軸中心為控制點的運動學模型,即
其中,l表示作業車輛后軸中心運動路徑弧長;v表示作業車輛行進速度;d表示運動路徑橫向偏差;ρ表示車輛行進航向偏差;c(l)表示運動路徑曲率半徑;θ表示作業車輛前輪轉角;H表示插秧機作業車輛后軸軸長;γ表示外界干擾。
假設存在z=[z1,z2]T=[d,ρ]T,則有
作業車輛后軸中心為控制點的運動學模型變換為
綜上所述,插秧機智能控制系統標準控制模型可表示為
4 性能試驗分析
為驗證智能插秧機控制系統的有效性,對插秧機控制系統進行性能試驗驗證。插秧機實際作業過程中,環境因素存在較大的不確定性,因此在進行性能試驗驗證時在水泥路面和水田內進行試驗,對控制系統的實用性和可靠性進行分析。
在水泥路面進行試驗時,插秧機從開始位置進行作業時,控制系統導航模塊實時記錄行進過程中產生的橫向偏差和航向偏差。圖3所示為水泥路面進行試驗時插秧機行進路徑橫向偏差;圖4所示為水泥路面進行試驗時插秧機行進路徑航向偏差。
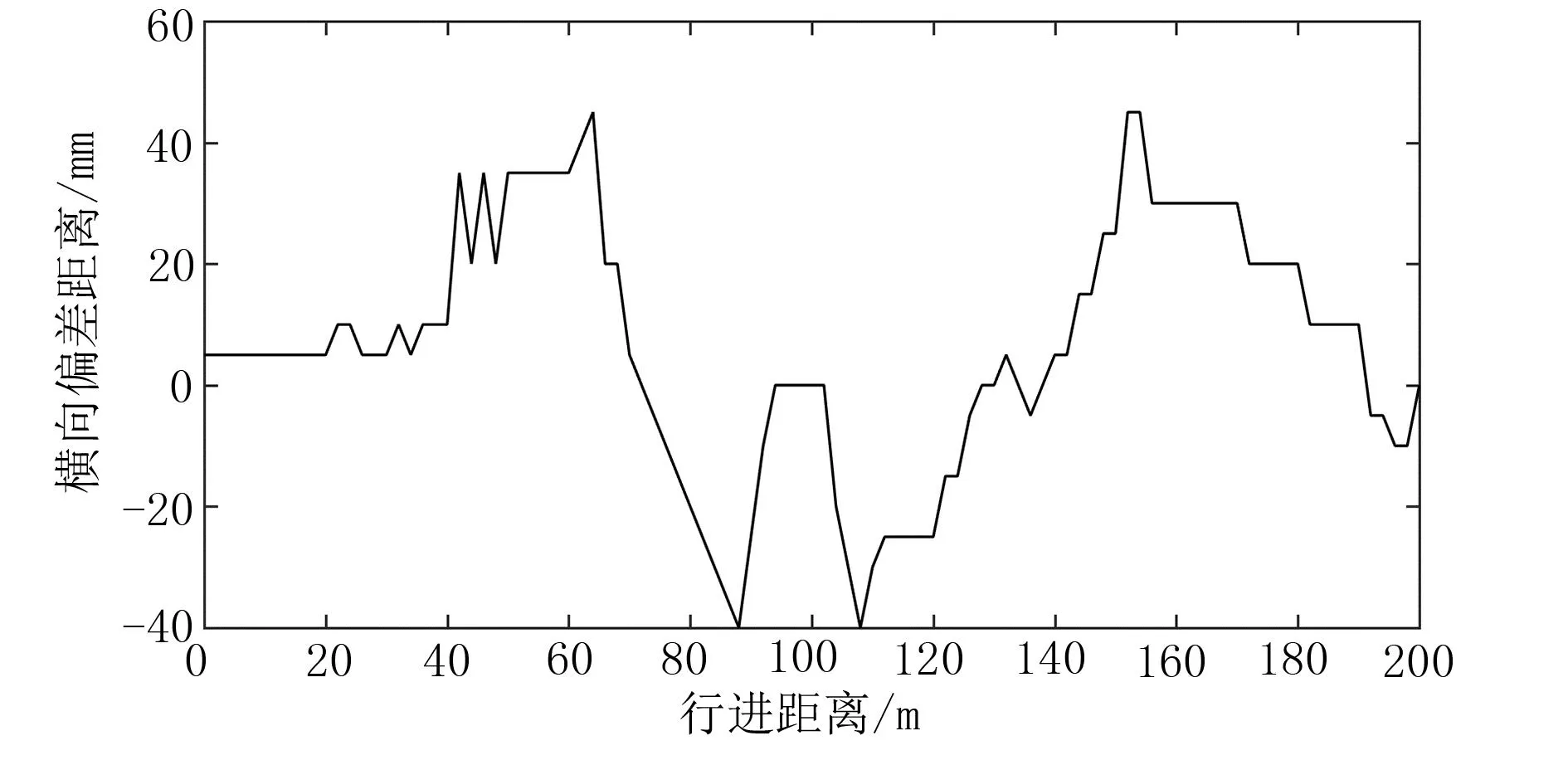
圖3 插秧機行進路徑橫向偏差(水泥路面)Fig.3 Lateral deviation of rice transplanter travel path (cement pavement)
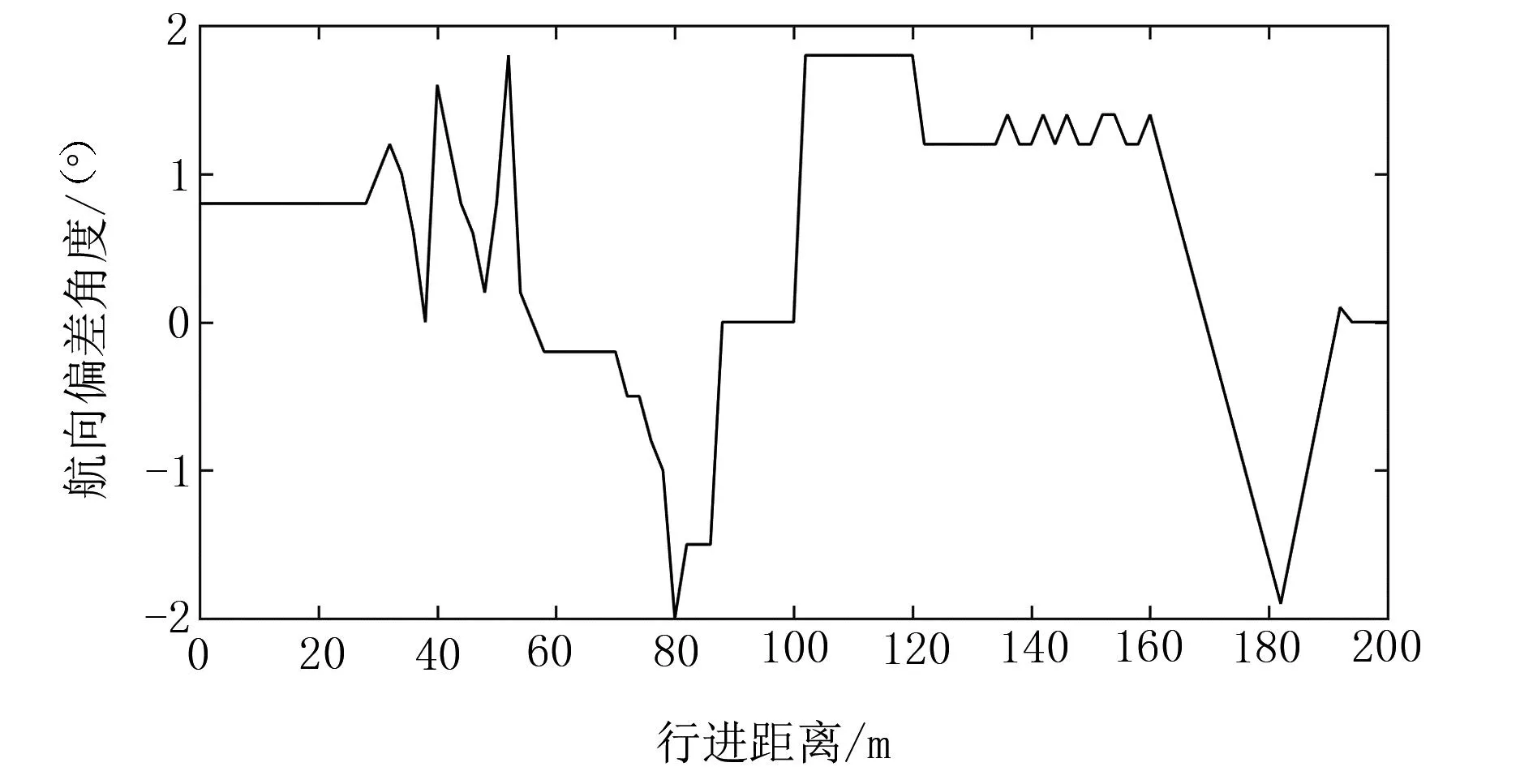
圖4 插秧機行進路徑航向偏差(水泥路面)Fig.4 Heading deviation of rice transplanter travel path (cement pavement)
進行水田試驗時,利用插秧機控制系統導航模塊對水田邊界點坐標值和航向角度進行采集,試驗過程中自主形成行進作業路徑。圖5所示為水田進行試驗時插秧機行進路徑橫向偏差;圖6所示為水田進行試驗時插秧機行進路徑航向偏差。
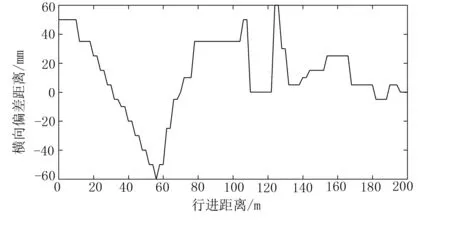
圖5 插秧機行進路徑橫向偏差(水田)Fig.5 Lateral deviation of transplanter travel path (paddy field)
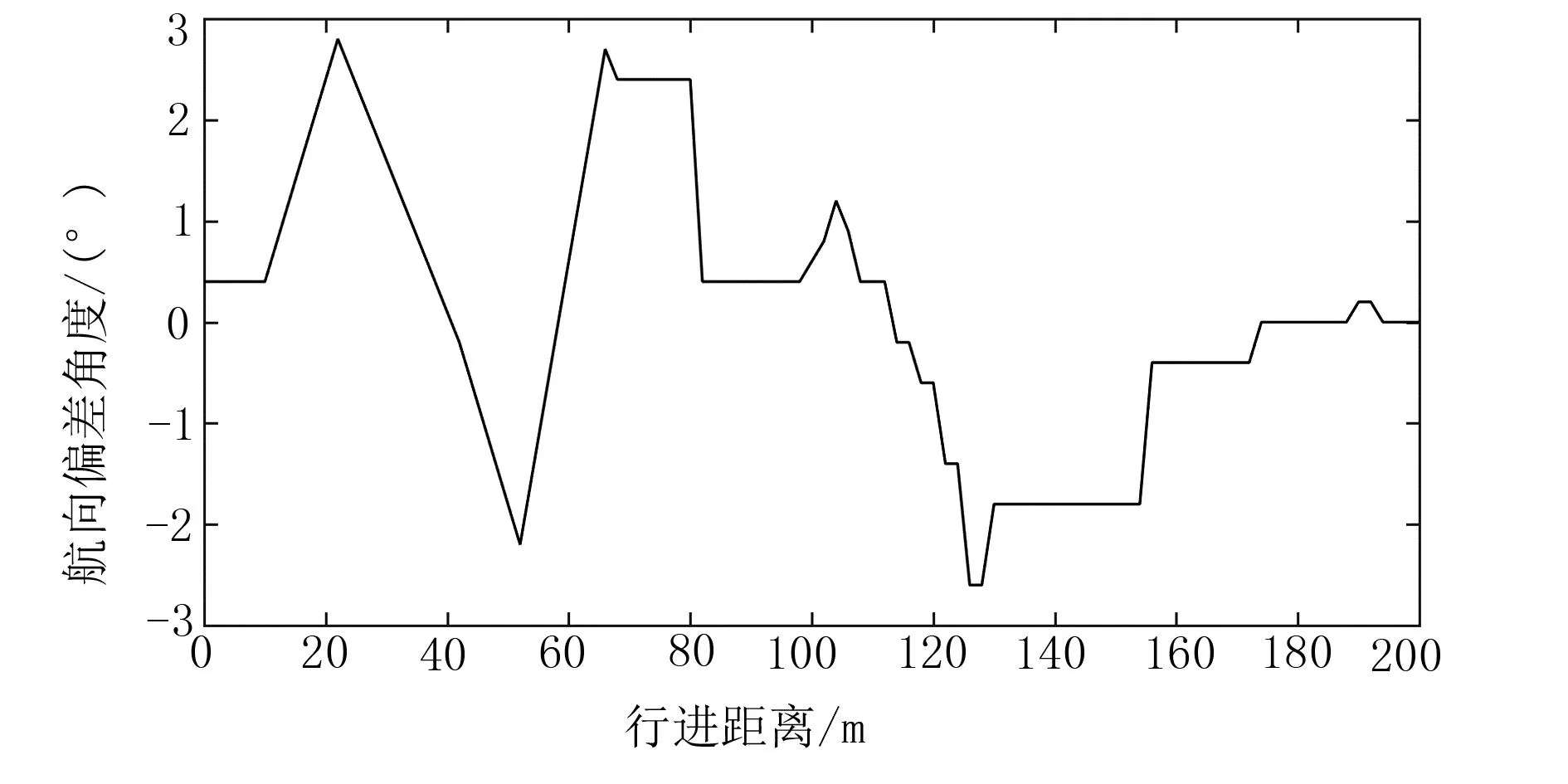
圖6 插秧機行進路徑航向偏差(水田)Fig.6 Heading deviation of rice transplanter travel path (paddy field)
由圖3~圖6可以看出:插秧機在水泥路面的行進速度約為0.8m/s,轉彎過程中速度約為0.4m/s,在行進至100m處位置時,插秧機進行轉彎。曲線數據表明:插秧機在水泥路面行進過程中,橫向偏差小于50mm,航向偏差小于2°;插秧機在水田進行作業試驗時,受到環境中滑移。暗坑及泥土深度等因素的干擾,插秧機在水田行進過程中,橫向偏差小于60mm,航向偏差小于3°。
5 結論
基于面向對象技術,利用自動導航和智能控制的方式設計一種智能控制系統,實現了插秧機作業過程的自主導航和自動駕駛等智能控制,有效改善插秧作業的直線度和作業效率。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
故事大王(2016年7期)2016-09-22 17:30:08
