軌道交通非接觸式障礙物檢測技術及前景方向探討
2024-01-09 21:57:45霍然
經濟技術協作信息 2023年10期
摘 要:本文介紹了軌道交通非接觸式障礙物檢測技術及前景方向。通過使用先進的技術手段,可以及時檢測到軌道上的障礙物,避免事故的發生,保障乘客的安全出行。非接觸式障礙物檢測系統主要基于視頻識別和雷達多傳感器信息融合技術,具有連續探測識別前方一定距離內障礙物的能力。不同的傳感器技術各有優缺點,需要根據具體情況進行選擇、優化和結合。新型的傳感器和技術也將不斷出現,為軌道交通的安全性和效率提供更加可靠的支持。
關鍵詞:軌道交通;障礙物檢測;非接觸式障礙物檢測
引言
隨著城市交通向智能化、環保化發展,軌道交通作為一種高效、便捷的交通方式,逐漸成為城市交通的重要組成部分。同時,由于軌道交通的特殊性質,其運行安全和順暢性與廣大乘客的生命財產安全以及社會秩序的穩定密切相關。在這種情況下,障礙物檢測技術成為保障軌道交通安全和順暢運行的重要手段。軌道交通的發展帶來了更高的時速和更繁忙的運營,同時也增加了軌道上的風險。障礙物檢測技術的重要性日益凸顯,通過使用先進的技術手段,可以及時檢測到軌道上的障礙物,避免事故的發生,保障乘客的安全出行。
目前,障礙物檢測手段在自動駕駛汽車領域中較為成熟,在復雜的路況中,障礙物被歸類為“正障礙物”和“負障礙物”兩類。其中從地面“向上”出現的物體被視為正障礙物,反之在路面“向下”出現的深坑甚至懸崖則被視為負障礙物,負障礙物的檢測比正障礙物要更加困難。
而在軌道交通中,由于軌道的作用,車輛的行駛條件相較于汽車更為簡單,更多的精力應當被施加于對正障礙物的檢測中,例如前方的非通信列車、誤入軌道的人或動物、現場遺留的施工工具或者行李箱等,根據探測方式不同而分為接觸式和非接觸式兩種。
接觸式障礙物檢測采用純機械結構和硬線通信結合的方式,故障率極低,其主要檢測裝置是一根安裝在轉向架前端的輕質鋁合金探測橫梁,通過與軌道上的障礙物物理接觸后,吸能變形觸發干接點信號[1]。但這種檢測方式受軌道條件及探測橫梁距離的限制,檢測距離過短,逐漸不適于平均設計速度高的軌道交通,因此非接觸式障礙物檢測應運而生。
一、非接觸式障礙物檢測傳感器
非接觸式障礙物檢測主要依賴于各種車載或軌旁的傳感器,對車輛行駛前方范圍(車載傳感器)或者固定軌行區內(軌旁傳感器)的障礙物進行探測識別,不同的傳感器有不同的優缺點。
(一)計算機立體視覺
計算機立體視覺是計算機視覺中最活躍的研究領域之一。立體視覺測量方法具有效率高、系統結構簡單、適用性強、成本低、精度高等優點。
計算機立體視覺始于20世紀70年代初。具有雙目視覺技術的計算機立體視覺與自動駕駛汽車或移動機器人一起用于收集數據和檢測障礙物。在車載傳感器方面,兩臺性能相同但相隔一段距離的相機拍攝同一個圖像,計算機將兩個圖像疊加在一起進行比較,以找到匹配的部分。偏移的量稱為視差,通過特征點的視差,以及已知的鏡頭間距、焦距等參數,就可以利用計算機算法得出特征點與鏡頭的距離。
而在實際場景中,還需要對系統進行進一步的優化,例如直接制作雙目攝像機以降低間距的人為測量誤差,增加攝像頭以提高冗余性能,對采集到的RGB圖像進行預處理及灰度轉換以降低干擾與計算量,通過優化算法提高算力,通過計算機深度學習增加對特定的模型的靈敏度等。王維等研究了一套基于視頻圖像識別技術的列車障礙物識別系統,其傳感器采用的是2臺獨立且相同的高清攝像機,通過軟件對數據處理,實現對列車前方障礙物的檢測[2]。高暉設計了一套基于紅外圖像和可見光圖像匹配并進行算法篩選,從而檢測軌道交通障礙物的系統[3]。
計算機立體視覺在軌旁傳感器領域也有很多的應用。由于軌道的存在,軌道交通車輛的行駛條件較為簡單,背景較為固定,因此可以利用在相同的位置連續拍攝的圖片進行對比,利用計算機識別其中的差異,判斷障礙物入侵的情況。例如王先選等提出了一種基于機器視覺理論和仿射幾何原理的異物入侵軌道交通線路檢測方法,可有效地識別列車軌道區域,發現入侵的障礙物[4]。
(二)雷達傳感器
在眾多的檢測技術中,雷達傳感器以其獨特的優勢成為軌道交通障礙物探測的重要手段。雷達傳感器通過發射電磁波并接收反射回來的信號,可以快速、準確地檢測到軌道上的障礙物,如石頭、鐵塊、動物等。雷達傳感器能夠實時檢測到障礙物,并及時發出警報,為快速排除障礙物提供依據,確保軌道交通的安全和順暢運行。因此,可以說雷達傳感器在軌道交通障礙物探測中發揮著不可或缺的作用,成為行業中的重要技術手段。其中,毫米波雷達和激光雷達是兩種主要的類型。
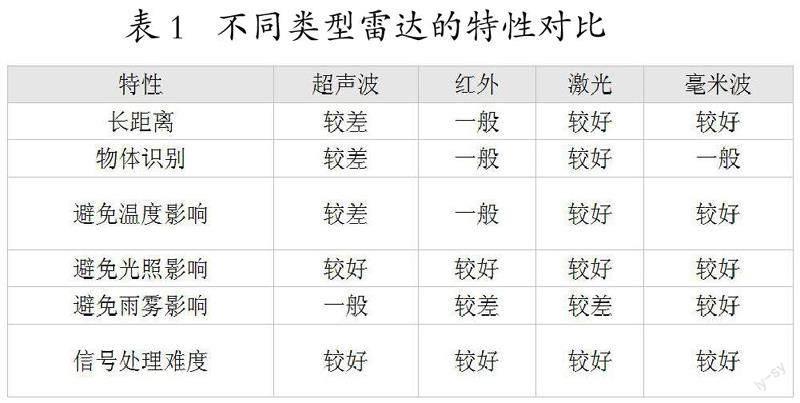
表1是不同類型雷達的特性對比:
表1? ?不同類型雷達的特性對比
1.毫米波雷達
毫米波雷達傳感器是21世紀障礙物檢測的熱門研究領域。毫米波雷達技術應用于車輛防撞系統的研究始于20世紀60年代,隨著雷達技術的飛速發展,76GHz毫米波雷達帶來了傳感器革命。與早期的低頻率毫米波雷達相比,這些雷達的工作頻率更高,體積更小。頻率越高,目標的分辨率就越高,從而克服了大多數錯誤信息的問題。
與其他微波雷達相比,毫米波雷達由于其短波長和高分辨率而成為更好的選擇。與其他類型的雷達(超聲波雷達、紅外雷達、激光雷達)相比,毫米波雷達具有穩定的探測性能,不受探測物體的形狀和顏色的影響。此外,它具有良好的環境適應性。它的探測精度不易受到雨雪、霧天等惡劣天氣的影響。噪聲和環境變化也不易影響其性能。
毫米波雷達探測一般有兩種基本方法:脈沖雷達和調頻連續波雷達。脈沖雷達探測原理很簡單,雷達系統發出一定頻率的脈沖電磁波并探測回波,以發出及接收到雷達波的時間差來判斷障礙物距離,這種方法計算簡單但是技術實現和應用困難。在脈沖測距中,雷達應在有限的時間間隔內發射大功率脈沖信號,硬件結構復雜且昂貴。此外,回波具有60dB至100dB的衰減。在分析回波信號之前,需要在發送信號和回波信號之間進行嚴格隔離。這個問題可能會增加雷達設施的成本。調頻連續波雷達則會發射連續的調頻信號,雷達的混頻器收集回波并將其與發射信號混合。混頻器后的波形用于計算障礙物的距離和相對速度。景亮等開發了一種結合毫米波雷達和計算機視覺的軌道交通障礙物自動檢測平臺,證明了此系統的可靠性。
2.激光雷達
激光雷達在軌道交通障礙物探測的歷史可以追溯到20世紀90年代。當時,激光雷達技術已經開始在鐵路領域得到應用。隨著技術的不斷進步和發展,激光雷達逐漸成為軌道交通障礙物探測的主要技術手段之一。相較于毫米波雷達,激光雷達的測量精度更高,能夠檢測到更小的障礙物,其有著更加精確的3D感知能力,可以更好地對障礙物進行精準建模。激光雷達的原理類似于脈沖型毫米波雷達,基于回波時間差來判斷障礙物距離,數據量豐富,但是相應的計算量也會增大。激光雷達可以利用SLAM技術同步定位和建圖,對軌行區的障礙物進行建模處理。
在軌旁傳感器領域,相較于計算機立體視覺,雷達傳感器在光照不足、雨霧環境下更加穩定,可以利用多條雷達波向軌行區實時掃描并利用算法三維立體成像,例如同濟大學沈拓等提出了一種基于激光雷達的區間障礙物檢測算法,實驗表明其具有良好的檢測性能。
二、非接觸式障礙物檢測系統發展及前景
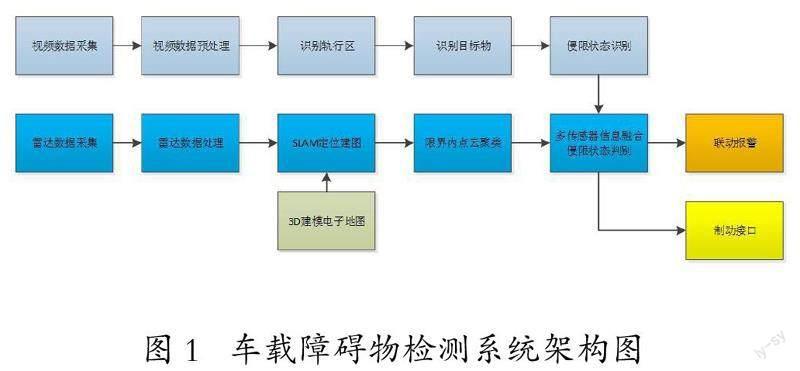
當前,軌道交通的非接觸式障礙物檢測系統主要基于視頻識別和雷達多傳感器信息融合技術,如圖1所示,具有連續探測識別前方一定距離內障礙物的能力。它能及時檢測到軌行區異物的侵入并觸發報警和制動,同時通過通信接口,將在車輛和調度中心工作站上顯示的相關障礙物信息,供相關工作人員確認。調度中心可以隨時調用實時的視頻畫面,并在檢測到障礙物時主動推送相關信息和視頻畫面。此系統由運算主機、雷達設備、高清攝像機以及接口設備等組成。
圖1? ?車載障礙物檢測系統架構圖
目前的檢測系統已經可以實現包括障礙物探測、障礙物報警、實時圖像監控等多種功能,但如果要達到其障礙物探測能力完全優于人眼識別能力及安全距離,運用在GOA4級別的全自動運行系統列車上,將該系統與車輛制動系統結合,則有以下幾點需要發展完善:
第一,隨著軌道交通列車時速的提高,緊急制動距離增加,對障礙物檢測距離的要求進一步提升,因為需要有更加精密靈敏的傳感器設備和更完善的算法。
第二,如果將障礙物檢測系統接入車輛的制動系統,則對障礙物檢測系統的誤報率有著較高的要求,如果障礙物檢測系統誤報率高,則會導致車輛頻繁緊急制動,影響乘客的出行體驗。在優化障礙物檢測算法的基礎上,還可以考慮融合多種傳感器,增加冗余檢測器的方法,利用三取二等冗余措施提高準確性。
第三,在某些關鍵軌行區增設軌旁檢測系統。相對于車載檢測,軌旁檢測的算法更簡單,且有提前預測性,能夠在車輛距離障礙物很遠時就發現入侵的障礙物。然而考慮到成本問題,目前無法做到全線防護,但是可以在關鍵的軌行區增加軌旁檢測系統,例如彎道處等車載傳感器檢測不到的區域、地鐵從地下轉換到地面的光線強弱變化處、輕軌的某些開放區域等。
結束語
隨著軌道交通發展進程的不斷加快,全自動無人駕駛系統的市場占比增高,軌道交通對障礙物檢測系統的需求進一步提高,既有的接觸式傳感器系統已經難以滿足要求。本文介紹了目前常用的幾種非接觸式障礙物檢測傳感器及其在車載和軌旁方面的應用,并對非接觸式障礙物檢測系統前景方向進行了探討。總的來說,非接觸式障礙物檢測技術為軌道交通的安全運行提供了重要保障。不同的傳感器技術各有優缺點,需要根據具體情況進行選擇、優化和結合。隨著科技的發展,新型的傳感器和技術也將不斷出現,為軌道交通的安全性和效率提供更加可靠的支持。
參考文獻:
[1]張帆,張從旺.基于無人駕駛平臺的主被動障礙物檢測分析對比 [J].鐵道車輛,2021,9(04):1-8.
[2]高暉.基于紅外圖像與SURF算法的軌道交通障礙物識別技術研究[J].信息系統工程, 2023(01):80-82.
[3]景亮,趙程,燕玲,等.基于毫米波雷達的城市軌道交通全自動運行設計與探索[J].智能城市, 2021, 7(16):4.
[4]沈拓,錢沿佐,謝蘭欣,等.考慮反射強度的全自動運行列車障礙物檢測算法研究[J].同濟大學學報:自然科學版, 2022, 50(01):7.
作者簡介:霍然(1992.12-),男,漢族,山西沁縣人,碩士,工程師,研究方向:交通工程。