站立下肢康復訓練器的研發
2024-01-09 21:57:45劉博陸英男花鵬
經濟技術協作信息 2023年10期
劉博 陸英男 花鵬

摘 要:針對我國人口老齡化問題日益加重、失能老人尤其是下肢功能障礙老人數量增加的問題,為了提高老人的自主生活能力及后期生活質量,減少家屬及護理人員的負擔,我公司研制了一款新型的站立下肢康復訓練器,旨在幫助下肢功能障礙老人進行下肢功能恢復訓練,該產品使用安全,康復功能強大,適用范圍廣泛,可以解決下肢康復過程中的絕大部分問題,從而幫助患者提高生活質量。
關鍵詞:下肢康復;功能訓練;研發
一、背景
隨著我國醫療技術的發展,我國的人均壽命不斷延長,已達77.0歲。人均壽命延長固然可喜,但人口老齡化的問題隨之而來[1],截至2022年底,我國60歲以上老年人口數量達2.12億,占總人口的15.5%,失能老人超過3800萬人,根據《中國腦卒中防治報告(2022)》顯示,我國腦卒中患病率呈上升趨勢,由此引發的下肢功能障礙如果缺乏后續康復治療和訓練,將會導致肌肉萎縮、潰爛甚至人體相關機能喪失,進而嚴重影響患者的后續生活質量[2]。目前國內市場缺少相應的下肢康復訓練設備,已有設備不能很好地進行下肢康復全面訓練,同時專業康復訓練人員儲備嚴重不足,人工輔助康復強度大。因此,我公司設計了一款專門針對下肢功能康復的新型站立下肢康復訓練器,該新型設備可實現整體升降,起立角度自由調節,康復運動速度可由康復醫生在上位機上自主設定,具有主動、被動兩種訓練模式,同時設備可進行痙攣檢測及足底壓力檢測,超出設定范圍可自主停機保證使用者安全,同時該設備可極大地減輕輔助康復人員工作強度,具有很高的社會效益[3]。
二、構成及工作原理
站立下肢康復訓練器主要由底座部、整體升降部、下肢訓練部及床體等4部分組成,其中整體升降部鉸接在底座部上,二者之間安裝有水平高度調節電動推桿,通過水平高度調節電動推桿的伸縮完成高度的調節,下肢訓練部通過兩側轉軸與整體升降部鉸接固定,二者之間安裝起立電動推桿,通過起立電動推桿伸縮可實現下肢訓練部沿轉軸旋轉,進而從水平狀態轉動到垂直狀態。下肢訓練部與底座部之間在兩側安裝有氮氣彈簧,用以改善起立電動推桿的受力狀態,對整體起立床架起到輔助支撐作用。同時為確保設備使用時的安全性,在下肢訓練部達到豎直狀態時設置機械限位裝置,整體升降部與下肢訓練部的軸連接件間設置有上限位擋塊和下限位擋塊,當下肢訓練部在起立電動推桿的作用下起立到達90°時,兩個限位擋塊相互嚙合,限定下肢訓練部和整體升降部的相互轉動,同時兩個限位擋塊表面覆蓋有緩沖墊,進一步減小沖擊。床體部下端通過轉軸鉸接固定在下肢訓練部上,在下肢訓練部及床體間通過鉸接件固定安裝有角度調節電動推桿,角度調節電動推桿通過伸縮可實現下肢訓練部與床體間的角度變化,在進行下肢康復訓練前床體與地面成平行狀態,使用者首先躺在床體上,采取臥姿在床體上完成訓練前的相關準備工作(包括調整身體姿態、固定身體位置等),之后通過醫護人員操作起立電動推桿將使用者從臥姿慢慢轉變為立姿,最后使用者通過下肢訓練部帶動進行包括模擬踏步在內的下肢康復相關訓練,整個站立下肢康復訓練器總體結構如圖1所示:
(一)底座部分
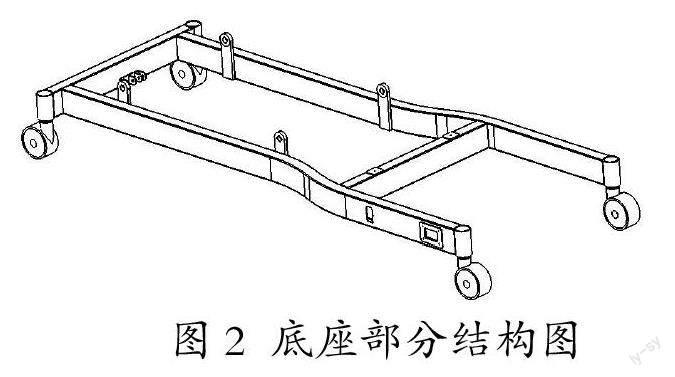
底座部分主要由鋼管及鉸鏈焊接而成,底座部分承擔包括整個設備及康復時使用者在內的全部重量,底座焊架上焊接鉸鏈與訓練器升降部分通過連接銷軸相連接,使用時底部安裝腳輪,腳輪采用萬向剎車醫用腳輪,方便設備的移動及駐停,具體結構如圖2所示。
(二)整體升降部分
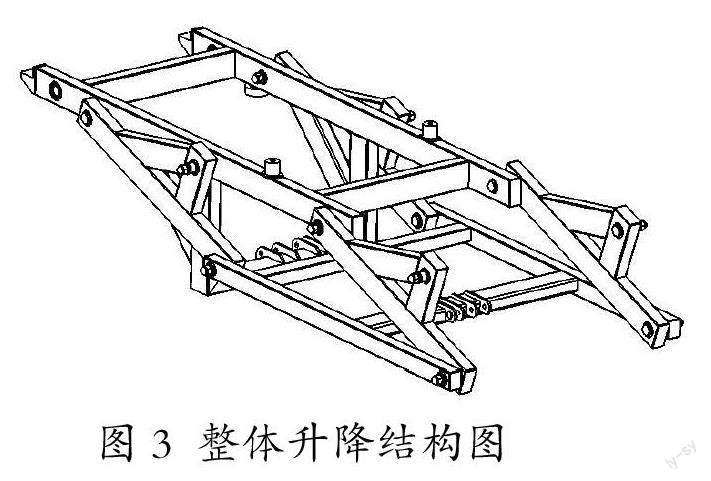
整體升降部分主要由上部升降焊架、下部升降焊架及升降轉桿焊架3部分組成(圖3),3部分通過連接銷軸鉸接而成,以上3部分組成平行四邊形結構,在水平高度調節電動推桿及氮氣彈簧的雙重作用下,以上3部分之間發生相對位置變化,其組成的平行四邊形的結構也發生變化,進而實現整個機構的上升與下降。整個機構通過連接銷軸與底座部分及訓練部分相連接,升降高度由康復醫師通過手柄控制水平高度調節電動推桿伸縮進行調節(圖4)。
(三)下肢訓練部分
訓練部分主要由抬膝驅動部分及腳部調節裝置兩部分組成。其中抬膝訓練部分結構圖如5所示,抬膝訓練機構是整個裝置的核心,也是完成康復訓練的主要裝置,其主要由驅動電機及減速器、絕對值位置編碼器、主動齒輪、被動齒輪、導向軸、滾珠絲杠、膝部訓練升降滑塊、升降滑塊鉸鏈、抬膝推桿、直線滑軌及腿部固定部件組成。在訓練過程中,康復醫師根據使用者的實際情況設定康復訓練各項指標(如訓練模式、訓練速度、訓練時間、痙攣檢測閾值等),訓練開始時,膝部訓練部驅動電機通過減速器開始驅動主動齒輪旋轉,進行一級減速,同時絕對編碼器記錄主動齒輪位置并向上位機進行實時反饋,主動齒輪通過齒輪間嚙合驅動從動齒輪轉動完成二級減速,從動齒輪通過鍵連接帶動滾珠絲杠旋轉,絲杠旋轉的同時絲母滑塊在絲杠上進行上下往復移動,膝部訓練升降滑塊與絲母滑塊通過螺釘緊固連接,隨絲母滑塊在絲杠上進行上下往復滑動運動。在膝部訓練升降滑塊上下運動的過程中,導向軸在縱向起導向作用,保證膝部訓練升降滑塊運動方向。膝部訓練升降滑塊與滑塊鉸鏈通過螺釘鉸接,抬膝推桿通過連接銷軸與滑塊鉸鏈連接,隨著升降滑塊沿導向軸上下往復運動,滑塊鉸鏈帶動抬膝推桿前后擺動。同時為了彌補患者身高方面的差異,在抬膝推桿與膝部固定部分中用直線滑軌連接,膝部固定部分在抬膝推桿的推動下沿直線滑軌繞抬膝銷軸進行擺動,膝部固定部分與患者下肢通過綁帶相連,帶動患者下肢進行康復訓練,完成踏步模擬,幫助患者進行康復訓練。該訓練器具有主被動兩種訓練模式,可針對患者的不同情況由康復醫師自主選擇,同時在訓練過程中,訓練器可根據監測到的患者腿部力量數據實時調整主被動訓練模式,保證患者進行最為有效的下肢康復訓練。
此訓練部分充分考慮使用者身形不同的情況,在訓練部分中設置了腳部調節裝置,具體結構如圖6所示,腳踏板機構由腳踏焊接板、腳踏焊架、腳踏板、固定轉軸、踏板轉軸、鎖緊手柄、應力傳感器、應力傳感器控制板、拉力彈簧構成。其中固定轉軸用螺釘固定于腳踏焊板之上,固定轉軸兩側分別安裝有踏板轉軸,踏板轉軸上面安裝有鎖緊手柄,可實現踏板轉軸在固定轉軸上的位置調節。腳踏焊架安裝在腳踏轉軸之上,可在腳踏轉軸上自由轉動,腳踏焊架上端焊接有球形鉸接件,腳踏板通過鉸接件安裝于腳踏焊架之上,可自由地調節腳踏板的角度,旁邊的鎖緊手柄起到鎖緊和調節的作用,腳踏焊架后端固定通過拉伸彈簧與應力傳感器相連接,拉伸彈簧起到緩沖作用,提高人體在康復訓練過程中的舒適度。應力傳感器固定于腳踏焊板之上,當患者進行踏步訓練動作時,應力傳感器可實時地將腳踏板受力情況進行采集,首先傳遞給應力傳感器采集卡,再由應力傳感器采集卡傳遞給上位機控制系統,康復醫師可根據傳感實時反饋數據調整訓練參數,制定康復計劃。
整個下肢訓練部配有直線軸承與線性導向軸,腳踏裝置與下肢抬膝裝置通過導向軸及腳踏裝置高度調節電動推桿相連,整個下肢訓練部分整體結構如圖7所示,腳踏裝置通過高度調節電動推桿伸縮進行縱向位置調整,使直線軸承沿線性導向軸滑動,調節腳踏板的高度以滿足不同身高者的使用需求。
此外,為避免意外,保證使用者在訓練時的人身安全,該訓練器配有痙攣檢測系統,該系統可以監測在訓練過程中瞬時電流變化進而判斷患者腿部是否發生痙攣,在訓練器上位機判斷使用者發生痙攣時,訓練器立即減速、反向旋轉進而緩慢停車,保證使用者人身不受傷害,在醫護人員使用者確認使用者安全,判定痙攣解除后,手動操作發出繼續訓練指令,訓練器在接到指令后將再次正常運轉。
(四)床體部分
該康復訓練器在水平放置時可供患者平躺并做訓練前的準備,該訓練器床體由鋼管焊架加木質床板組成,配有記憶棉床墊。進行訓練時,可通過電動推桿作用調整與訓練部所成角度以保證使用者可以以一種最為舒適的姿態進行下肢康復訓練,床體部分配備懸掛綁帶,使用者通過綁帶將自身大部分重量懸掛于床體本體上。
該下肢站立康復訓練器設計充分考慮人體工程學及相關標準,允許使用者最大身高200cm,最大負載170kg,最大腿部負載50kg,整體升降高度0mm~300mm,起立角度0°~90°,后仰調節角度0°~15°,可調節擺腿速度8~60 steps/min,均符合國家相關標準及人體工程學,適合下肢功能障礙患者使用。
結語
本文設計的站立下肢康復訓練器將廣泛應用于下肢功能障礙患者的康復治療中。在訓練開始前康復醫師可根據患者實際康復情況制定訓練方案,設定數值,具有很強的針對性。同時,在訓練中,設備可根據患者實際情況切換主被動訓練模式,以達到更好的訓練效果,同時該訓練器配有力傳感器和痙攣檢測系統,可實時監控患者康復過程中的狀態,保證使用者的使用安全。最后,該訓練器可調整整體高度及起立角度,可滿足不同使用者使用需求。本次研發的產品技術含量較高,具有目前國內市場相關產品所不具備的相關功能,各項參數均符合相關國家標準及人體工程學,使用方便,安全可靠,市場前景廣泛。
參考文獻:
[1]丁敏,李建民,吳慶文,等.下肢步態康復機器人:研究進展及臨床應用[J].中國組織工程研究,2010,14(35):6604-6607.
[2]田姍姍,馮立艷,吳卓繁,等. 下肢康復機器人機構設計及運動學分析[J].華北理工大學學報:自然科學版,2017,39(01):96-101.
[3]倪文彬,瞿志俊,張建云,等.一種步態康復訓練機器人設計[J].機械科學與技術,2016,35(11):1665-1672.