基于微分平坦的磁懸浮移動平臺控制研究
2024-01-16 06:20:28王旭胡珈寧李奪周振雄
機床與液壓 2023年24期
關鍵詞:系統
王旭,胡珈寧,李奪,周振雄
(北華大學電氣與信息工程學院,吉林吉林 132013)
0 前言
隨著時代的發展,傳統的滾珠絲杠傳動機床逐漸被直線電機驅動的機床所取代。與傳統的滾珠絲杠電機相比,直線電機可直接將電能轉化為直線運動的機械能,省去了滾珠絲杠傳動過程中所消耗的能量。直流直線電機是通電線圈構成的動子由一個軟桿支撐,在永磁體生成的均勻磁場中會受到垂直于電流方向的安培力作用,力的大小由安培定則F=BIL確定。如果想要直流直線電機反方向移動,則只需要提供一個反向電流即可[1-2]。但是直流直線電機運動過程中,動子和軟桿之間會產生摩擦,從而影響直流電機的精確性[3]。
通過磁懸浮技術將需要支撐的平臺懸浮起來,不僅可以消除平臺移動過程中的大部分摩擦力而提高移動平臺的精確性,還可以降低移動平臺和其他機械結構之間的磨損,提高機床的使用壽命[4-5]。傳統機床為了降低摩擦力會在部件接觸部分涂抹潤滑油[6];而磁懸浮移動平臺移動的過程中沒有摩擦力,就不需要潤滑油[7],從而大大減少了污染,為工人提供了一個相對潔凈的工作環境。
為了使磁懸浮移動平臺能夠快速、穩定的沿著期望曲線到達預定位置,需要對磁懸浮移動平臺的T形動子進行精確控制[8-10]。文獻[11]提出了PID算法控制的磁懸浮移動平臺,雖然可以使動子最終到達預定位置,但是其算法跟蹤性不強,與期望軌跡之間的誤差較大,精準性不高。文獻[12]提出的模糊PID算法控制磁懸浮移動平臺,在PID的基礎上增加了模糊推理環節,雖然使動子能更快響應,但無法解決軌跡跟蹤的問題。文獻[13]提出的滑模控制磁懸浮移動平臺,增強了響應速度,但是收斂過早,優化后的精度不高,跟蹤性不強,同時參數調節較為復雜。文獻[14]提出偽微分反饋(PDF)控制磁懸浮移動平臺,相比前幾個控制算法響應更快、魯棒性更強,但還是無法滿足軌跡跟蹤的要求。
針對算法精準性不足、跟蹤性不強、參數調節復雜等問題,本文作者提出基于微分平坦算法控制磁懸浮移動平臺。微分平坦算法的精準性和跟蹤性遠遠優于其他算法,并且其參數整度也較為簡單。
1 磁懸浮移動平臺的模型建立
1.1 磁懸浮移動平臺的動力學模型
磁懸浮移動平臺是由一個U形定子和一個T形動子組成,如圖1所示。T形動子如圖2所示,T形動子三端分別纏有一定匝數的線圈,定子為動子提供一個均勻的磁場,當T形動子三端線圈通電之后,T形動子三端會受到安培力作用,通過調整三端通電線圈內的電流大小和方向使T形動子做出不同的運動軌跡。
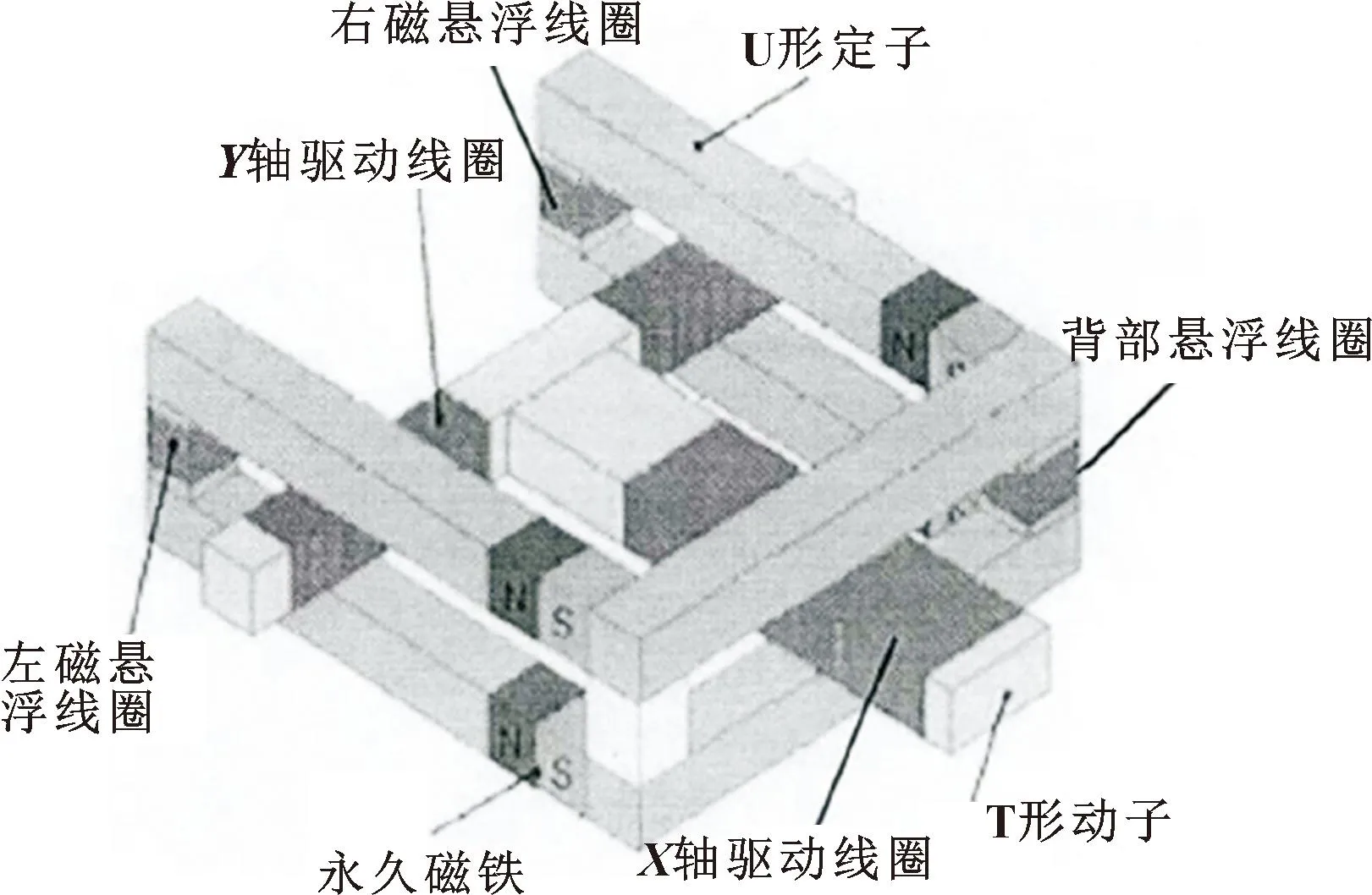
圖1 磁懸浮移動平臺示意Fig.1 Schematic of maglev mobile platform
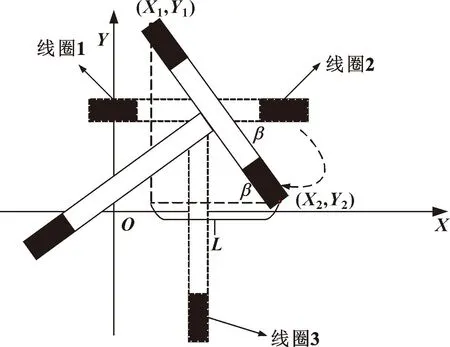
圖2 T形動子示意Fig.2 Schematic of T-shaped actuator
1.2 磁懸浮移動平臺動子的受力分析
如圖3所示,磁懸浮移動平臺的動子在水平方向受到3個方向的力,所以動子在水平方向有3個自由度,分別是:沿著X軸方向移動;沿著Y軸方向移動;沿著Z軸方向旋轉。動子在旋轉過后的位置會與動子的初始位置形成一個夾角β。
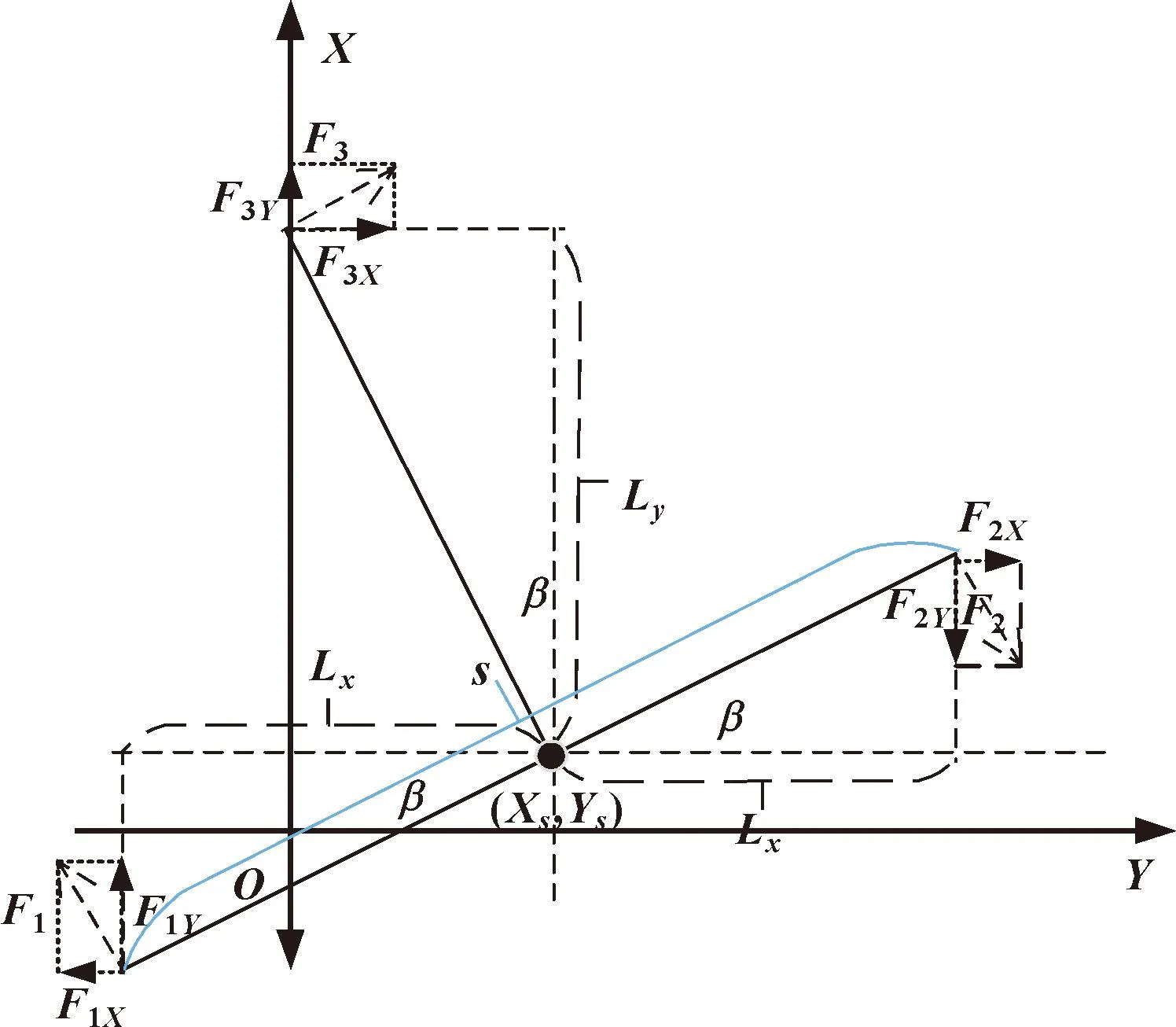
圖3 磁懸浮移動平臺T形動子受力分析Fig.3 Force analysis of T-type mover of maglev mobile platform
磁懸浮移動平臺動子旋轉角度β移動公式:
(1)
其中:Y1-Y2為T形動子橫向長度;L為橫向長度在X軸方向的投影長度。
如圖3所示,T形動子所受到的3個力可以根據三角函數分解成沿X軸方向的力和沿Y軸方向的力。每個力分解之后的形式為
(2)
其中:F表示矢量;f表示標量;β表示T形動子的偏移角度。
可以結合以下動力學公式化簡上述公式:
(3)
其中:F是力;v是速度;s是位移;m是動子質量;M是力矩;J是轉動慣量;α是角加速度。
將式(3)代入式(2)化簡得到:
(4)
其中:f1、f2、f3是3個水平方向的力;u1、u2、u3是輸入電壓。由圖4可知3個水平力的表達式為
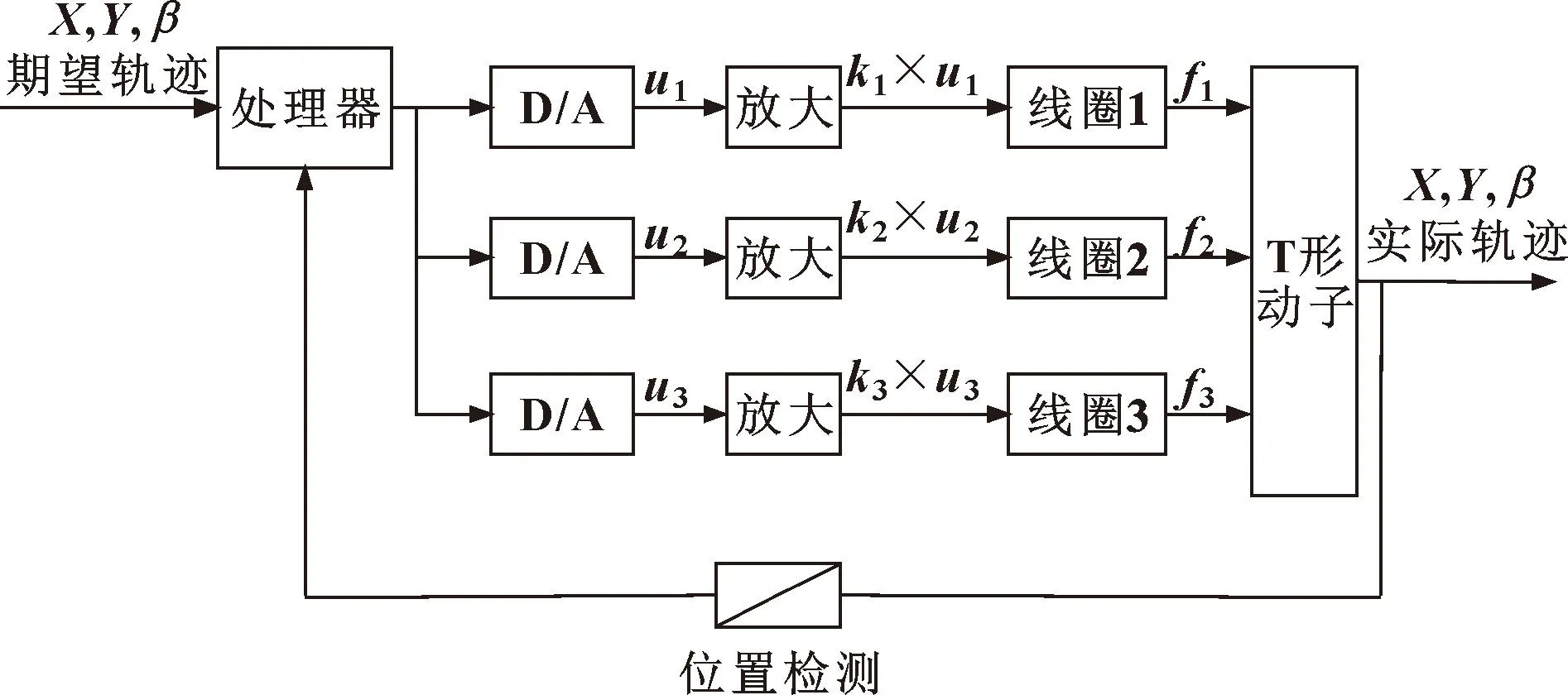
圖4 T形動子水平移動控制原理Fig.4 Principle of horizontal movement control of T-type movable actuator
(5)
因為輸入電壓通過放大之后變成電流,然后電流輸入各個線圈產生各個方向的水平力,所以k1、k2、k3為比例系數(A/V)。將式(5)代入式(4)中,化簡得到:
(6)
2 微分平坦理論與微分平坦性驗證
2.1 微分平坦理論簡介
微分平坦理論是在逆動力學原理的基礎上提出來的,理論上微分平坦理論應該被應用于線性系統,但是目前微分平坦理論更廣泛應用于非線性系統。微分平坦理論(Differential Flatness)最早作為微分代數的概念被提出,后來由FLIESS、RATHINAM和MURRAY等經過一系列的研究后應用于動力學問題[15-16]。微分平坦理論指出了非線性系統動力學特征的存在性,理論上如果該線性系統滿足某種條件并且選擇合適的微分平坦輸出,就可以將非線性系統轉化為線性系統。換句話說,如果能找到一組合適的平坦輸出量,并且系統中的所有狀態變量和輸入變量都可以由這一組平坦輸出量以及平坦輸出量的各階導數表示出來,那么這個系統就是微分平坦系統[17]。目前微分平坦理論被廣泛地應用于軌跡跟蹤、功率跟蹤等。由于微分平坦系統的輸入變量和狀態變量可以由平坦輸出量以及其導數變換得到,那么根據期望的平坦輸出軌跡,可以直接獲得無差的狀態變量和輸入變量。如果微分平坦系統用公式可以更準確地表示為
(7)
如果狀態變量和輸入變量能滿足下列條件:
(8)
則可以稱此非線性系統為微分平坦系統。其中r和t都是整數,表示導數階數。由于非線性系統選取的平坦輸出量并不唯一,所以狀態變量和輸入變量也可能不同。
2.2 磁懸浮移動平臺微分平坦性驗證
根據式(6)得到磁懸浮移動平臺狀態方框圖如圖5所示。
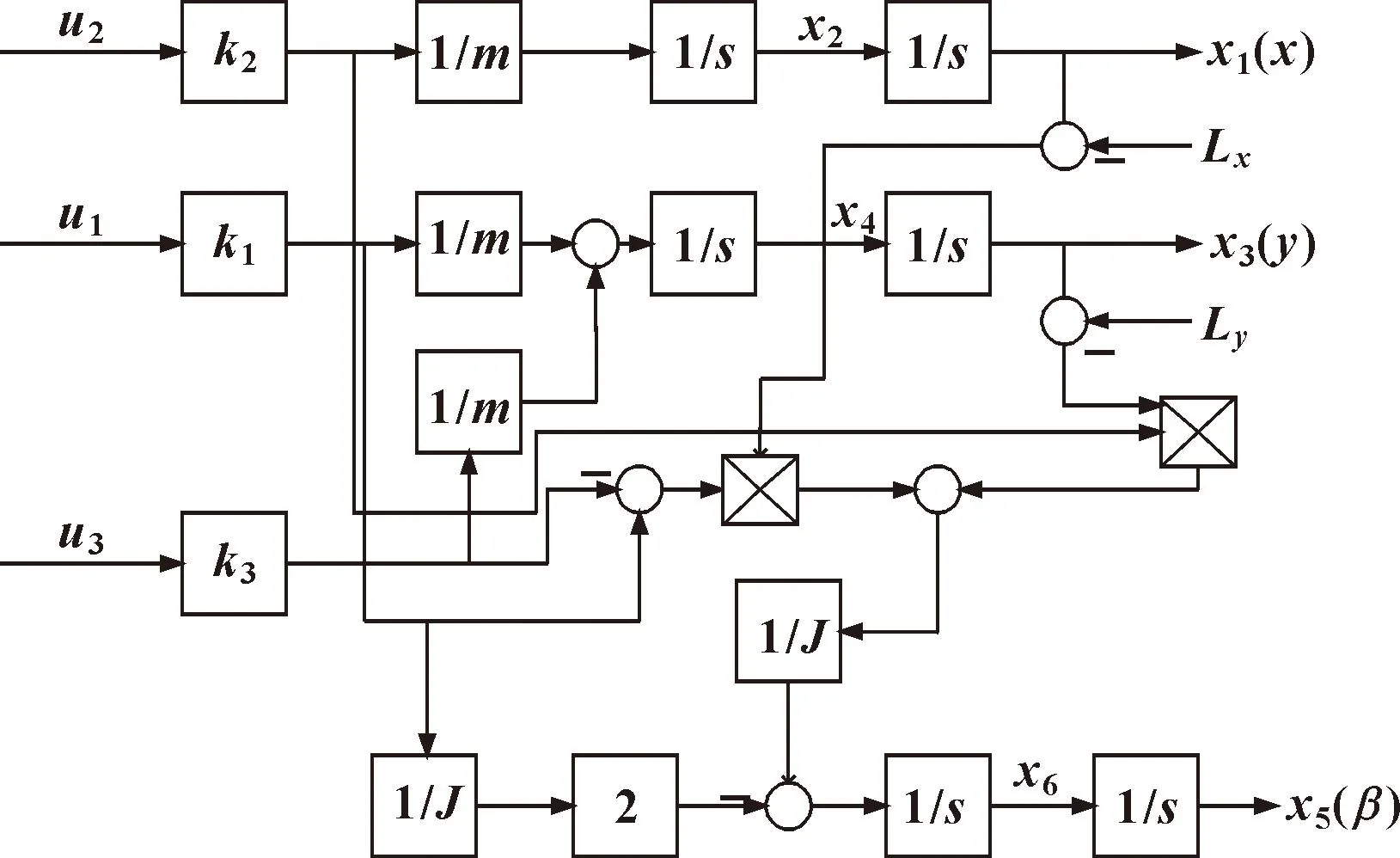
圖5 磁懸浮移動平臺狀態方框圖Fig.5 Block diagram of maglev mobile platform status
系統的狀態方程為
(9)
其中:vx是動子沿X軸方向運動的速度;ax是動子沿X軸方向運動的加速度;vy是動子沿Y軸方向運動的速度;ay是動子沿Y軸方向運動的加速度;ω是動子旋轉的角速度;α是動子旋轉的角加速度。
平坦系統的輸入矩陣為
(10)
由圖5可知狀態變量可由輸出變量表示為
(11)

(12)
由此可見,該系統所有的狀態變量都可以由該系統的輸入變量以及其導數表示。
由式(6)可知輸入的變量可由輸出變量表示為
(13)

(14)
由此可見,該系統所有的輸入變量都可以由該系統輸出變量的二階導數表示。綜上所述,輸入變量和狀態變量都可以由輸出變量以及其導數表示。
3 磁懸浮移動平臺微分平坦控制系統設計
磁懸浮移動平臺是一個微分平坦系統,并且成功地選出一組較為合適的平坦輸出值。根據前面的公式和微分平坦驗證可知,磁懸浮移動平臺控制系統由前饋控制組成,但該系統在實際運行過程中實際輸出的軌跡會與期望軌跡產生偏差,所以還需要加一個PI控制對誤差量進行補償。前饋控制首先需要根據式(8)生成期望的前饋控制量:
(15)
式中帶有“*”的值表示期望值。
實際輸出軌跡和期望軌跡的誤差為
(16)
輸入變量的誤差為
(17)
為了消除控制過程中產生的誤差,使磁懸浮移動平臺更好地跟蹤期望的軌跡,需要加入一個PI控制,PI控制反饋補償量為
(18)
式中:kp、ki、kq、ko、ke、kf為PI控制參數。因為磁懸浮移動系統有3個自由度,所以需要用3個PI控制,并且參數也不同。
實際微分平坦輸入控制量為
(19)
實際微分平坦輸控制量由前饋控制量和反饋控制量共同組成。基于微分平坦的磁懸浮移動平臺系統控制原理如圖6所示。
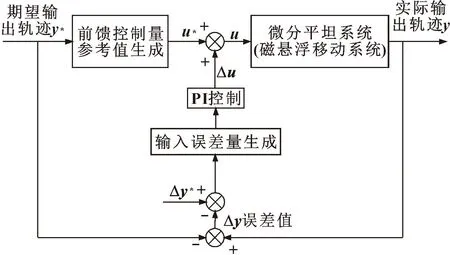
圖6 基于微分平坦的磁懸浮移動平臺系統控制原理Fig.6 Control principle of maglev mobile platform system based on differential flatness
4 微分平坦參數化與軌跡規劃
通常情況下,軌跡規劃問題就是最優控制問題,最優控制有以下形式:
(20)
微分方程需要滿足約束方程:
(21)
同時需要滿足以下約束方程:
(22)
式(21)(22)是軌跡規劃最優問題的約束方程。直接求解軌跡規劃最優問題非常困難,除了上述約束方程之外還有動力學微分公式,常規的求解方式無法輕易求出,所以需要將平坦輸出量參數化,把求解軌跡規劃最優問題簡化。平坦輸出變量參數化之后還可以降低系統的維數,將上述選取的平坦輸出量y參數化后就變成了y=(y(t1),y(t2),y(t3),…,y(tn))。而且由微分平坦系統的特性可知,系統的狀態變量和輸入變量都可以由其輸出變量表示出來,所以可以明顯降低系統的維數。通常情況下,系統輸出變量的維數和輸入變量的維數是一致的,系統的狀態變量維數高于系統輸出變量。例如上述選取的磁懸浮移動平臺系統的狀態變量是6維,而系統的輸出變量和輸入變量都是3維。
為了規劃一條軌跡,需要將平坦輸出量參數化為合適的時間函數。比如所有的平坦輸出y都可以參數化為
y(t)=Aijφj
(23)
式中:φj為基函數,該系統所有的平坦輸出變量都可以由這些基函數自由組合之后表示出來。基函數有很多種類型:多項式函數、三角函數、高斯函數、三樣條以及B-樣條。選取基函數時需要考慮基函數的階數,一般參考狀態變量和輸入變量在平坦輸出變量表達時出現的最高階數。將系統出現的最高階數設為J,一般基函數的階數不低于J。
假如設動子的期望軌跡為y=x2,將平坦輸出x參數化為一次函數x(t)=t2,因為磁懸浮移動平臺系統出現的最高階數為2,所以此函數滿足條件。則平坦輸出可以表示為
(24)
根據式(6)(9)將輸入變量和狀態變量分別表示為
(25)
(26)
5 仿真分析
通過MATLAB/Simulink搭建磁懸浮移動平臺微分平坦控制系統,磁懸浮移動平臺的各個參數如表1所示。將微分平坦輸出量參數化規劃為一條軌跡,表達式為:y=x2。通過4個方面分析磁懸浮移動平坦動子的運動軌跡,仿真波形如圖7-10所示。

表1 磁懸浮移動平臺參數Tab.1 Parameters of maglev mobile platform
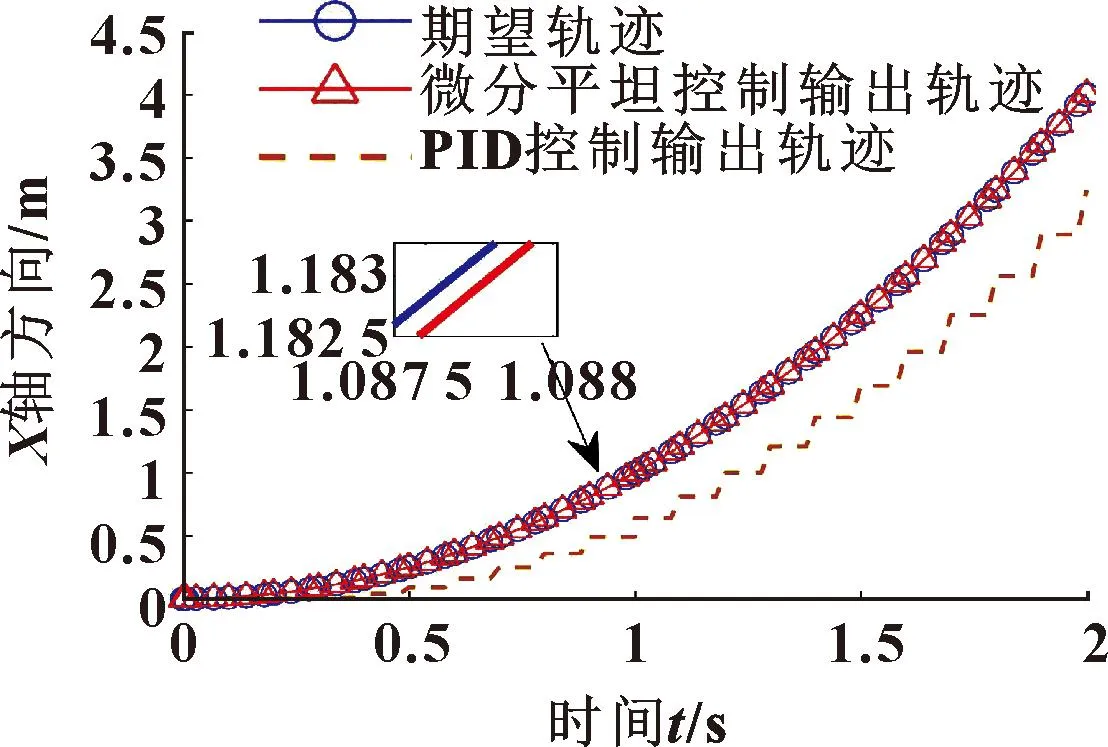
圖7 動子沿x方向隨時間移動波形(期望軌跡y=x2)Fig.7 Waveforms of mover moving with time along the

圖8 動子沿y方向隨時間移動波形(期望軌跡y=x2)Fig.8 Waveforms of mover moving with time in y direction (expected trajectory y=x2)
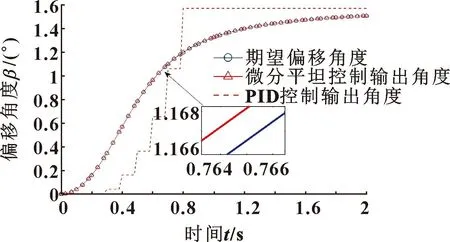
圖9 動子偏移角度隨時間移動波形(期望軌跡y=x2)Fig.9 Waveforms of mover offset angle moving with time (expected trajectory y=x2)
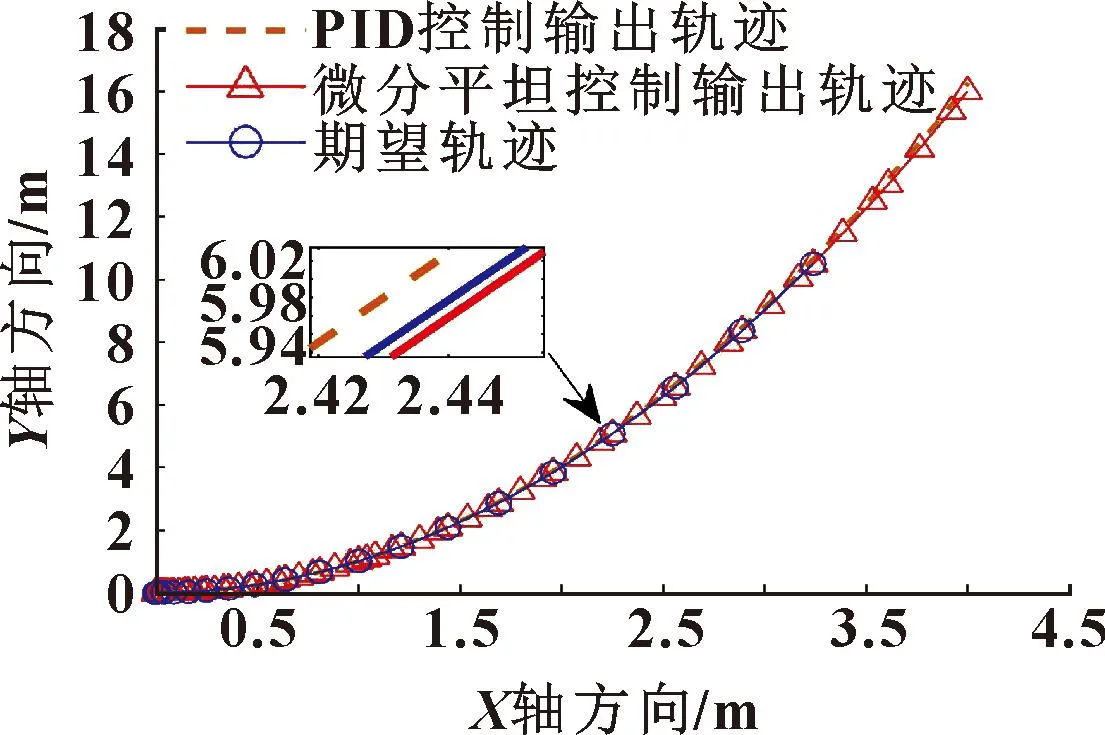
圖10 動子實際移動軌跡波形(期望軌跡y=x2)Fig.10 Waveforms of actual moving track of mover (expected trajectory y=x2)
xdirection (expected trajectoryy=x2)
通過圖7-10可知:磁懸浮移動平臺通過微分平坦控制,動子的移動軌跡幾乎跟隨期望軌跡;而通過PID控制磁懸浮移動平臺,動子的移動軌跡與期望軌跡之間的誤差較大。說明微分平坦控制比PID控制更為精準,可靠性更強,尤其是在加工允許誤差較小的零件時。
為了驗證磁懸浮移動平臺微分平坦控制系統的可靠性,需規劃一條新的軌跡。為了更直觀地對比微分平坦軌跡與期望軌跡以及PID控制的軌跡,選取一條較容易觀察的軌跡曲線。選取的軌跡曲線表達式為:y=sin2x,因為該表達式為一階,所以令x(t)=t即可。其他參數化后的表達式同上述方法,這里不再一一列出。仿真之后的波形如圖11-14所示。
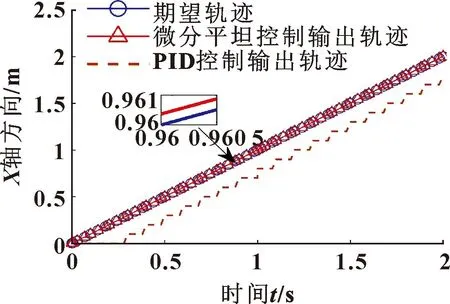
圖11 動子沿x方向隨時間移動波形(期望軌跡y=sin2x)Fig.11 Waveforms of mover moving with time along the x direction (expected trajectory y=sin2x)
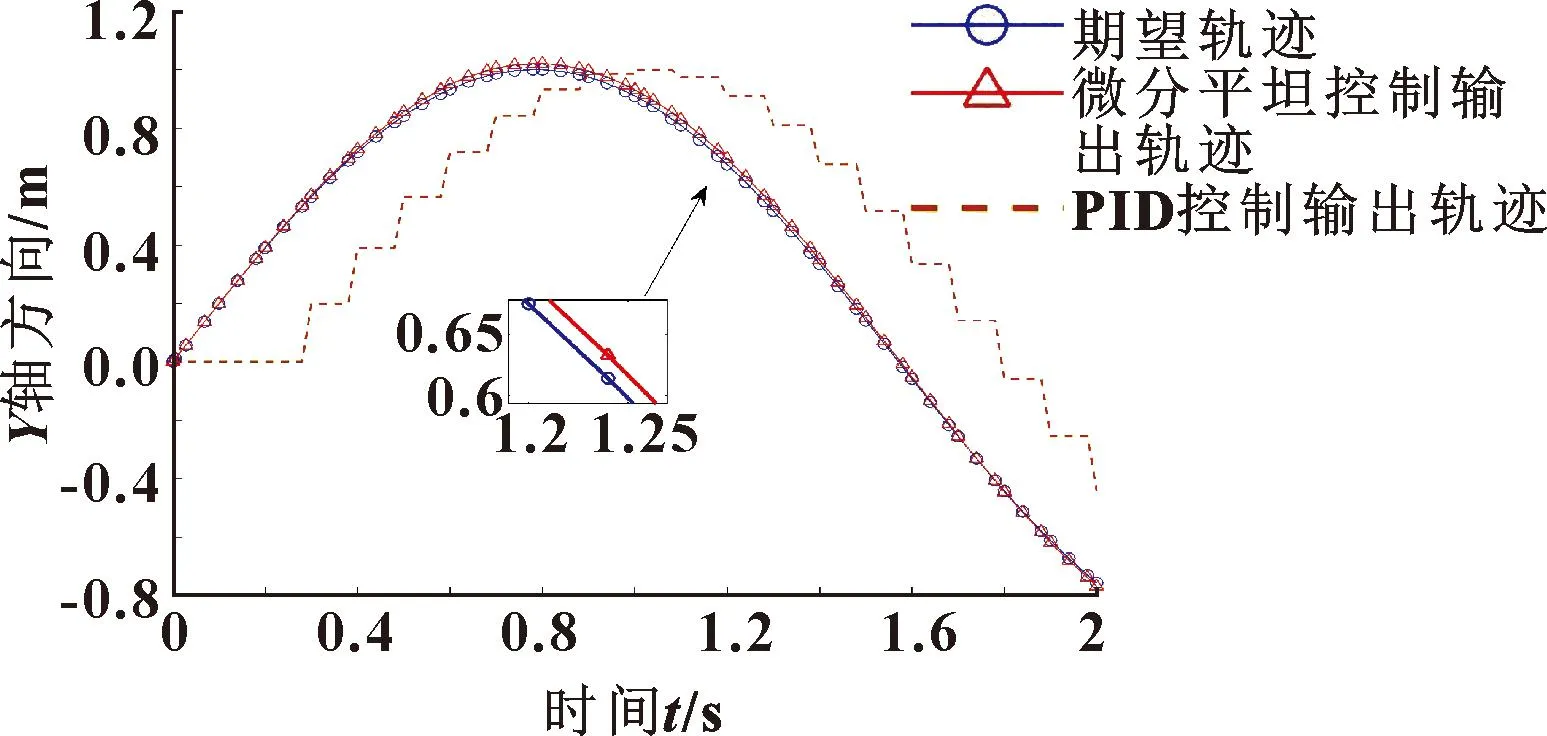
圖12 動子沿y方向隨時間移動波形(期望軌跡y=sin2x)Fig.12 Waveforms of mover moving with time in y direction (expected trajectory y=sin2x)
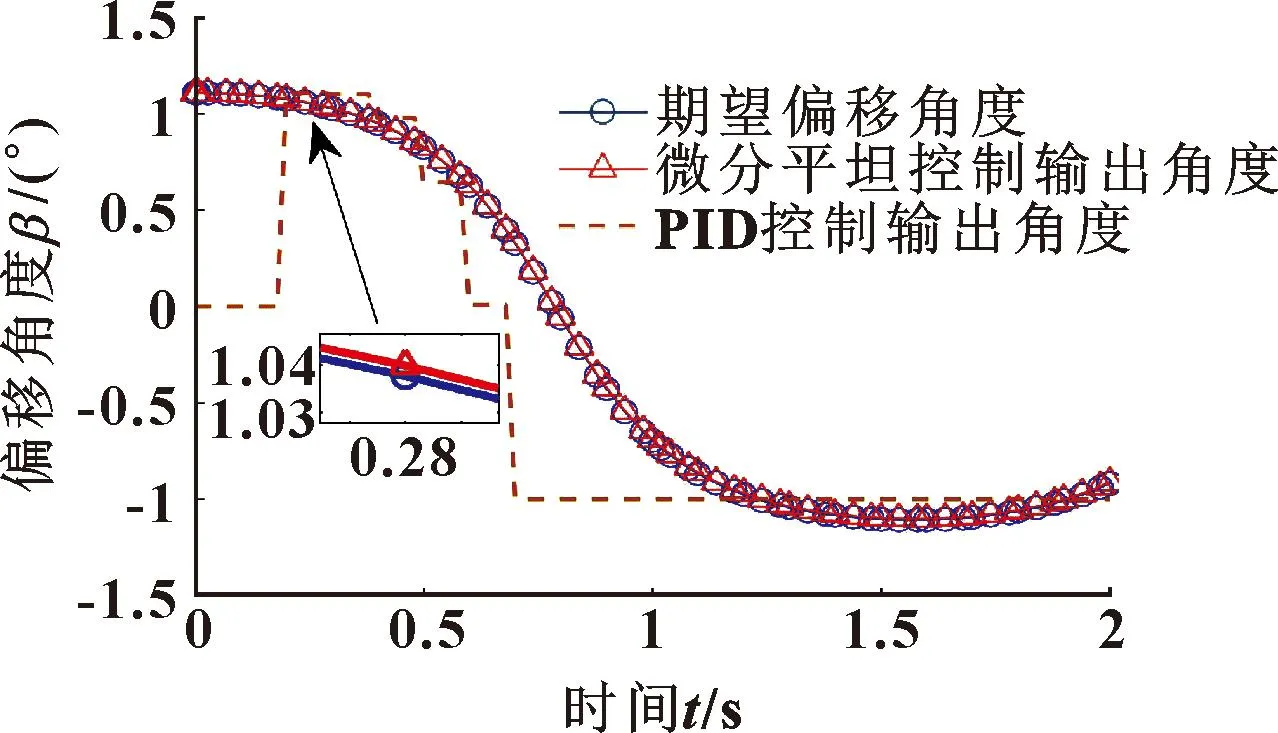
圖13 動子偏移角度隨時間移動波形(期望軌跡y=sin2x)Fig.13 Waveforms of mover offset angle moving with time (expected trajectory y=sin2x)
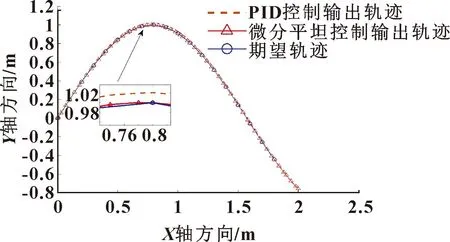
圖14 動子實際移動軌跡波形(期望軌跡y=sin2x)Fig.14 Waveforms of actual moving track of mover (expected trajectory y=sin2x)
由圖11-14可知:當期望軌跡為正弦函數時,可以清楚地觀察到微分平坦控制的磁懸浮移動平臺動子會更精準地跟隨期望軌跡移動,而PID控制的磁懸浮移動平臺動子則會偏離期望軌跡。從宏觀來看,磁懸浮移動平臺動子整體的移動軌跡幾乎重合,但放大之后發現微分平坦控制的磁懸浮移動平臺動子的移動軌跡更加貼近期望軌跡。
6 結論
文中構建了磁懸浮移動平臺的數學模型,通過數學模型結合動力學公式得出磁懸浮移動平臺系統的狀態空間表達式。結合微分平坦控制原理驗證了磁懸浮移動平臺是微分平坦系統;對微分平坦輸出量進行參數化和軌跡規劃。相對于傳統控制系統給定一個位置后讓磁懸浮移動平臺動子快速到達預定位置而言,微分平坦控制的磁懸浮移動平臺系統不僅能讓動子快速到達預定位置,還能讓動子按照期望的軌跡達到預定位置。相對PID控制的磁懸浮移動平臺系統而言,微分平坦控制的磁懸浮移動平臺系統中動子更接近期望軌跡曲線,更精準,可靠性更強。所以文中提出的微分平坦控制磁懸浮移動平臺系統具有實用性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32