基于電液混合儲能的電動挖掘機動臂節能驅動系統特性
2024-01-16 06:20:38王笑王磊
機床與液壓 2023年24期
關鍵詞:系統
王笑,王磊
(1.新疆工程學院,新疆烏魯木齊 830023;2.石河子大學機械電氣工程學院,新疆石河子 832003)
0 前言
目前,市場上絕大部分液壓挖掘機采用柴油發動機作為動力源,排放差,污染嚴重。隨著能源短缺及嚴格排放法規的實施,促使電動化成為液壓挖掘機節能、綠色發展的重要方向[1]。國外卡特彼勒、日立建機、小松、沃爾沃及國內三一、徐工、山河智能等裝備制造企業相繼推出了電動挖掘機樣機及產品。這些電動化挖掘機面臨的最大挑戰是采用集中動力源供能,多路閥分配動力的傳統液壓系統節流損失大,整機能效不足20%[2]。即使配置非常大容量的電池,整機續航時間依舊較短,難以滿足挖掘機長時間的作業需求。
因此,提高液壓系統能效是解決電動挖掘機作業時間短的重要途徑。近幾十年來,許多研究人員已對提高挖掘機液壓系統能效的方法進行了研究。楊華勇等[3]采用電比例泵與電比例閥構成流量匹配型負載敏感系統,可降低泵與最高負載壓力之間的差值0.6~0.7 MPa,較傳統負載敏感系統節能8%~10%。徐兵等人[4]提出一種帶旁路壓力補償的電液流量匹配系統,以解決過流匹配帶來的壓力沖擊和能量損失。李前坤等[5]研究了一種電動挖掘機的液壓系統流量匹配方法,采用泵閥同步控制方式,使系統壓力裕度維持在1.4 MPa。國外,亞琛工業大學BACKé[6]、德累斯頓大學JANSSON、PALMBERG[7]、瑞典林雪平大學AXIN[8]對負載口獨立控制系統進行了深入研究,使進出口獨立控制技術獲得了較大進步,已形成商業化產品。國內,徐兵等人[9]提出負載口獨立節能系統的泵閥聯合控制策略,實現動臂和斗桿作業的運動控制及節能控制,在滿足控制要求的情況下盡可能地降低系統能耗。董致新等[10]對泵閥復合負載口獨立控制液壓挖掘機系統進行了研究,采用流量匹配負載口獨立控制方法,顯著降低了閥口工作壓差,提高了挖掘機能量利用效率。曾億山等[11]設計了一種具有抗流量飽和功能的負載口獨立控制系統,與傳統負載敏感系統相比,液壓缸阻抗縮回工況可實現節能15.97%。劉凱磊等[12]設計了一種基于機液壓差補償的負載口獨立控制系統,與負載敏感系統相比,節能效果明顯。
據統計,挖掘機動臂下降過程浪費的重力勢能約為液壓泵輸出能量的15%[13]。因此,充分回收利用重力勢能對改善挖掘機液壓系統能效具有重要作用。挖掘機電動化為電氣式能量回收利用方法的應用提供了便利條件,電氣式回收方法通過液壓馬達或者液壓泵/馬達-發電機,將工作裝置重力勢能轉換為電能進行存儲[14]。車明哲等[15]分析了具有超級電容和節能閉環液壓系統的混合動力液壓挖掘機特性,比傳統液壓挖掘機油耗減少60%左右。為降低電氣回收單元的裝機功率,LIN等[16]采用蓄能器延長電氣能量回收時間,可降低液壓馬達和電動/發電機裝機功率60%,重力勢能回收效率為39%。李潔等人[17]研究了一種基于超級電容和蓄能器的挖掘機復合動作能量回收與再利用系統,該系統比原純電驅液壓挖掘機系統能耗減少29%[17]。
通過上述分析可知,電液流量匹配技術與負載口獨立控制技術在一定程度上可提高挖掘機系統能效,但本質仍是通過液壓閥節流進行動力分配,存在大的節流損失。現有的電氣式回收方案大多在閥口系統的基礎上進行設計,能量傳遞環節多,能量回收利用效率低,且裝機功率大。為此,本文作者提出一種變轉速雙泵直驅挖掘機動臂系統,通過配置2個液壓泵/馬達的排量,實現動臂液壓缸流量匹配與無節流損失驅動。液壓蓄能器作為液壓泵/馬達油箱,以液壓方式回收大部分工作裝置重力勢能,減小電氣儲能單元裝機功率;超級電容以電氣方式回收剩余的工作裝置重力勢能,解決蓄能器非線性特性造成的能量回收利用不充分的不足。
1 系統工作原理
圖1所示為變轉速雙泵直驅動臂液壓缸系統原理,主要包括電動機、液壓泵/馬達1、液壓泵/馬達2、蓄能器、驅動器、雙向DC-DC、超級電容、控制器等。液壓泵/馬達1的油口A與動臂液壓缸無桿腔連通,油口B通過換向閥與蓄能器連接或與油箱連通。液壓泵/馬達2的油口A與動臂液壓缸無桿腔連通,油口B與動臂液壓缸有桿腔連通。液壓泵/馬達1和液壓泵/馬達2排量之和與液壓泵/馬達2排量之比等于動臂液壓缸無桿腔與有桿腔面積之比,通過匹配液壓泵/馬達1與液壓泵/馬達2的排量,調節電動機轉速,實現動臂液壓缸流量匹配和速度控制。
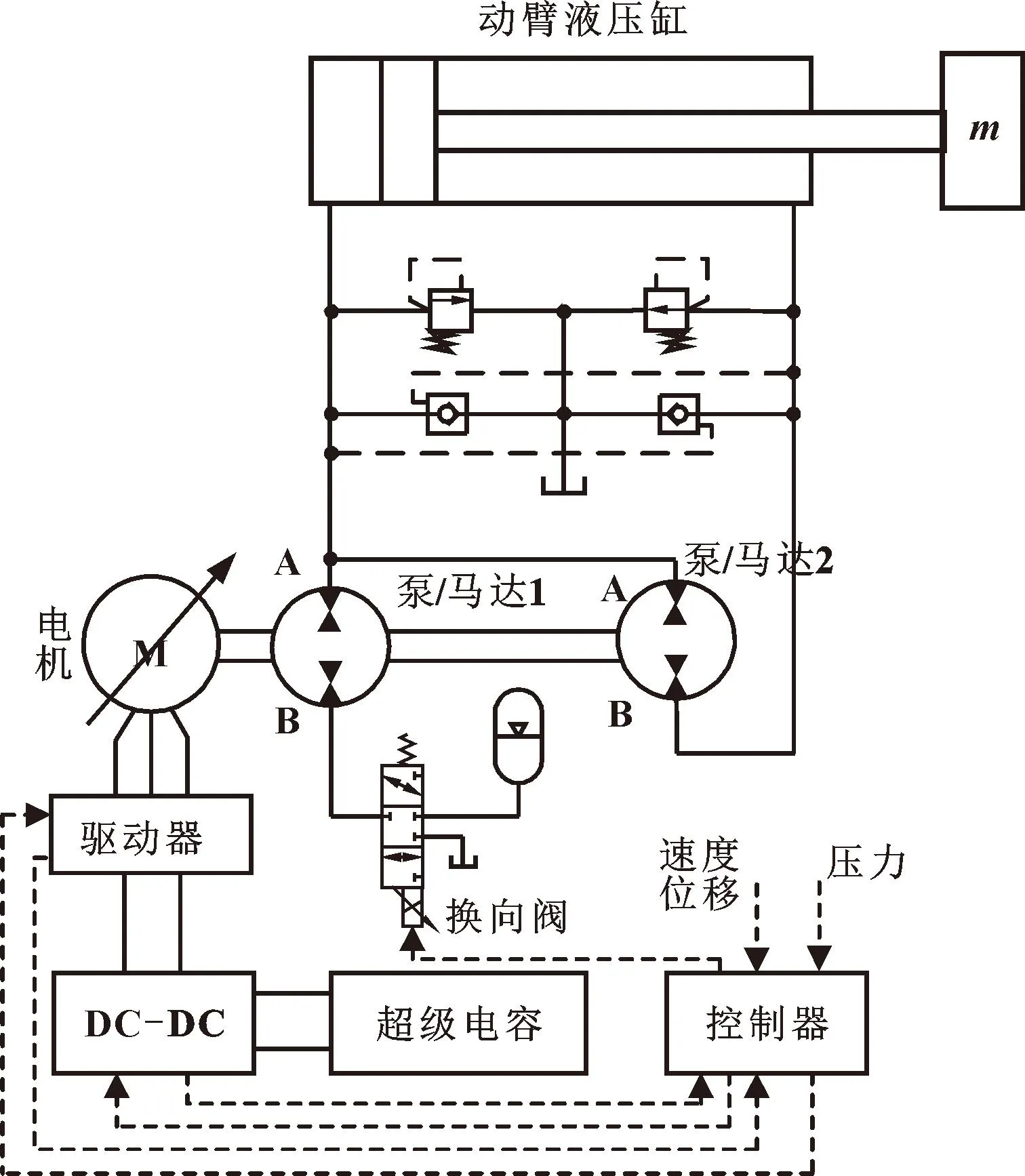
圖1 雙泵直驅動臂液壓缸系統原理Fig.1 Principle of boom hydraulic cylinder directed driven by double pumps
當動臂下降時,液壓缸無桿腔高壓油經過液壓泵/馬達1和換向閥充入蓄能器中,實現一部分工作裝置重力勢能的回收,同時電動機處于發電狀態,剩余工作裝置重力勢能存儲到超級電容中。當動臂上升時,蓄能器釋放高壓油至液壓泵/馬達1油口B,超級電容經雙向DC-DC釋放電量到電動機,共同驅動液壓泵馬達1和液壓泵/馬達2,控制動臂運行。換向閥的作用是在蓄能器壓力過高或動臂重載挖掘時,使液壓泵/馬達1與油箱連接泄壓。
2 數學模型與理論分析
此研究主要針對變轉速雙泵直驅挖掘機動臂系統的能量特性,因此,在數學模型建立過程中忽略了油液壓縮、元件泄漏等的影響。
動臂液壓缸力平衡方程為
ma+Bv=pAAA-pBAB-(mg+FL)
(1)
式中:AA為液壓缸無桿腔面積;AB為液壓缸有桿腔面積;pA為液壓缸無桿腔壓力;pB為液壓缸有桿腔壓力;m為挖掘機工作裝置質量;v為液壓缸速度;a為液壓缸加速度;FL為外負載力。
動臂液壓缸的流量平衡方程為
qA=AAv=(D1+D2)n
(2)
qB=ABv=D2n
(3)
式中:D1為液壓泵/馬達1排量;D2為液壓泵/馬達2排量;n為電動機轉速。
液壓泵/馬達1與液壓泵/馬達2的流量分別為
q1=D1n
(4)
q2=D2n
(5)
根據式(2)和式(3)可知,液壓泵/馬達1與液壓泵/馬達2的排量比為
(6)
液壓泵/馬達1與液壓泵/馬達2的轉矩方程為
(7)
(8)
忽略轉動慣量的影響,電動機的轉矩平衡方程為
(9)
在所提系統中,能量將在液壓泵/馬達1、液壓泵/馬達2、蓄能器、超級電容、電動機和動臂之間相互傳遞和轉換。這種傳遞與轉換關系可用電動機與泵/馬達轉矩解釋。圖2所示為動臂下降與舉升階段,液壓泵/馬達1、液壓泵/馬達2與電動機轉矩平衡關系。
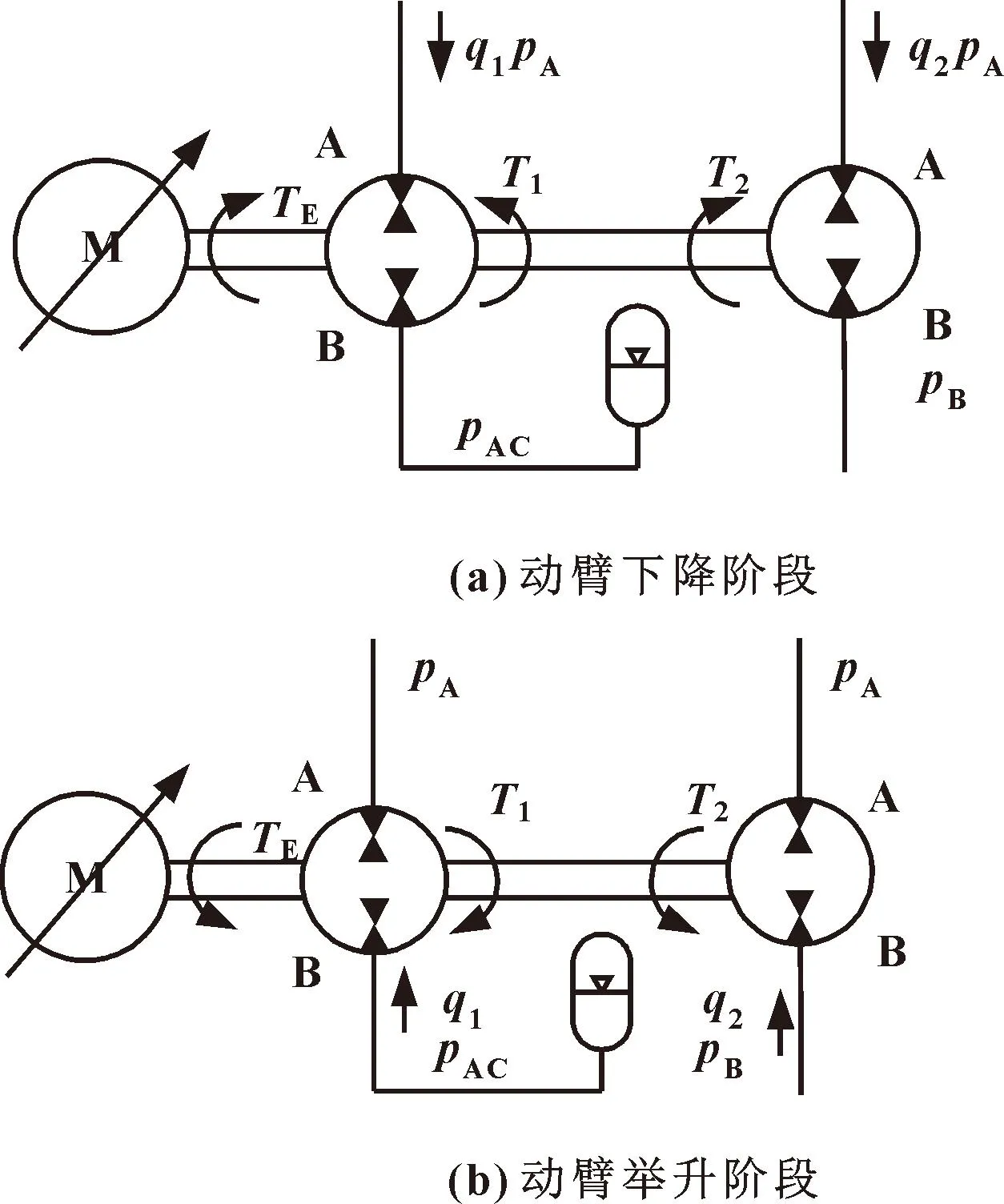
圖2 液壓泵/馬達與電動機之間轉矩平衡關系Fig.2 Torque balance relationship between hydraulic pump/motor and electric motor:(a) lowering process;(b)lifting process
在動臂下降過程中,液壓缸無桿腔一部分油液q1經液壓泵/馬達1進入蓄能器,一部分油液q2經液壓泵/馬達2進入液壓缸有桿腔。由于動臂無桿腔壓力pA大于有桿腔壓力pB,液壓泵/馬達2始終處于馬達工況。當蓄能器壓力pAC小于液壓缸無桿腔壓力pA時,液壓泵/馬達1處于馬達工況。此時,電動機處于發電狀態,轉矩為液壓泵/馬達1轉矩與液壓泵/馬達2轉矩絕對值之和。當蓄能器壓力pAC大于液壓缸無桿腔壓力pA時,液壓泵/馬達1處于泵工況。為使油液充入蓄能器,液壓泵/馬達2的一部分轉矩用于驅動液壓泵/馬達1,一部分轉矩用于驅動電動機發電。
在動臂上升階段,蓄能器油液q1經液壓泵/馬達1進入液壓缸無桿腔。液壓缸有桿腔油液q2經液壓泵/馬達2進入液壓缸無桿腔,液壓泵/馬達2始終處于泵工況。當蓄能器壓力pAC小于液壓缸無桿腔壓力pA時,液壓泵/馬達1處于泵工況。電動機處于電動狀態,一部分轉矩驅動液壓泵/馬達1,一部分轉矩驅動液壓泵/馬達2。當蓄能器壓力pAC大于液壓缸無桿腔壓力pA時,液壓泵/馬達1處于馬達工況。液壓泵/馬達1輸出轉矩與電動機輸出轉矩共同驅動液壓泵/馬達2。
3 系統特性分析
以某型號挖掘機為研究對象,在仿真平臺SimulationX中建立包含電氣、機械和液壓的雙泵直驅挖掘機動臂系統多學科聯合仿真模型,如圖3所示。挖掘機動臂液壓缸活塞直徑為150 mm,活塞桿直徑為105 mm。以動臂液壓缸運行速度300 mm/s為設計目標,根據液壓缸兩腔面積比及流量需求,電動機額定轉速為2 000 r/min時,確定液壓泵/馬達1排量為156 mL/r,液壓泵/馬達2排量為162 mL/r。
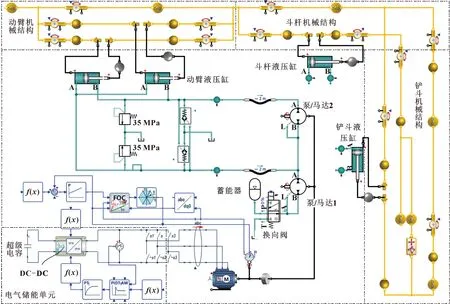
圖3 雙泵直驅挖掘機動臂系統多學科聯合仿真模型Fig.3 Co-simulation model of the double hydraulic pump direct driving hydraulic excavator boom system
蓄能器壓力設定為21 MPa,容積為180 L,圖4所示為雙泵直驅動臂系統的運行特性曲線。圖4(a)為動臂液壓缸速度與位移曲線,動臂舉升和下放過程中,液壓缸設定速度均為300 mm/s,運行位移為925 mm,速度超調和波動小,動臂運行平穩。圖4(b)為系統壓力曲線,蓄能器壓力在動臂舉升過程中由21 MPa逐漸降低到15.5 MPa,在動臂下降過程中由15.5 MPa逐漸升高至21 MPa。動臂舉升和下降啟動過程中,液壓缸無桿腔壓力存在較大波動,有桿腔維持補油壓力。圖4(c)為系統轉矩曲線,動臂舉升過程中,蓄能器壓力大于液壓缸無桿腔壓力,液壓泵/馬達1輸出轉矩與電動機轉矩共同驅動液壓泵/馬達2,隨著蓄能器壓力逐漸減小,液壓泵/馬達1轉矩由-114 N·m變化為20 N·m,電動機轉矩由315 N·m增大到426 N·m。動臂下降過程中,液壓泵/馬達2輸出轉矩一部分驅動電動機發電,一部分驅動液壓泵/馬達1為蓄能器充油,隨著蓄能器壓力逐漸增大,液壓泵/馬達1轉矩由-49 N·m變為-163 N·m,電動機轉矩由288 N·m減小到178 N·m。圖4(d)為超級電容電壓與電流變化曲線,動臂舉升階段,蓄能器壓力逐漸降低,超級電容電流逐漸增大,峰值電流為450 A。動臂下降過程中,一部分工作裝置重力轉換為電能存儲到超級電容中,超級電容電壓逐漸升高。

圖4 雙泵直驅系統運行特性Fig.4 Operation characteristics of double pump direct driving system:(a)velocity and displacement; (b)pressures;(c)torques;(d)current and voltage of super-capacitor
圖5所示為傳統閥控系統與雙泵直驅系統的能量特性曲線。由圖5(a)可知:液壓泵峰值功率為210.5 kW,共消耗能量592.2 kJ。動臂下降階段,工作裝置重力勢能經控制閥轉換為熱能耗散掉,約為463 kJ。由圖5(b)可知:蓄能器輸出功率約為動臂舉升需求功率的一半;在動臂舉升階段,超級電容為電動機供能,超級電容峰值功率為114.7 kW,消耗電能288.4 kJ;在動臂下降過程中,蓄能器存儲的能量為263 kJ,超級電容存儲電能107 kJ,計算可得混合儲能系統共回收重力勢能370 kJ,重力勢能回收效率為79.9%。動臂舉升和下放一個周期,超級電容電能減小209 kJ,與傳統閥控系統相比,能耗降低了64.6%。

圖5 不同系統能量特性Fig.5 Energy characteristics of different systems:(a) traditional valve control system;(b)double pump direct driving system
4 蓄能器參數影響分析
蓄能器作為雙泵直驅挖掘機動臂系統的關鍵元件,在動臂舉升和下降過程中,其壓力變化對混合儲能系統的重力勢能回收效率與節能效率具有較大影響。為此,進一步對蓄能器工作壓力與容積對系統能量特性的影響進行了探討。
設置蓄能器容積為180 L,圖6所示為蓄能器壓力不同時,超級電容電量變化曲線。可知:蓄能器壓力越大,動臂舉升階段蓄能器提供的能量越大,超級電容輸出能量越少。同時,蓄能器壓力越大,在動臂下降階段,電動機發電能量越小,超級電容存儲的電能越少。

圖6 蓄能器壓力對超級電容電量影響Fig.6 Influence of accumulator pressure on the energy of the super-capacitor
表1所示為蓄能器壓力對系統能量特性的影響規律。當蓄能器最高工作壓力由12 MPa增大到27 MPa時,蓄能器回收的重力勢能由163 kJ增加到了322 kJ,超級電容回收的重力勢能則由205 kJ降低為67 kJ。通過蓄能器回收重力勢能,能量轉換環節少,能量回收利用效率高。因此,隨著蓄能器壓力的升高,變轉速雙泵直驅系統能耗由273 kJ減少為180 kJ,節能效率為53.8%~69.5%。
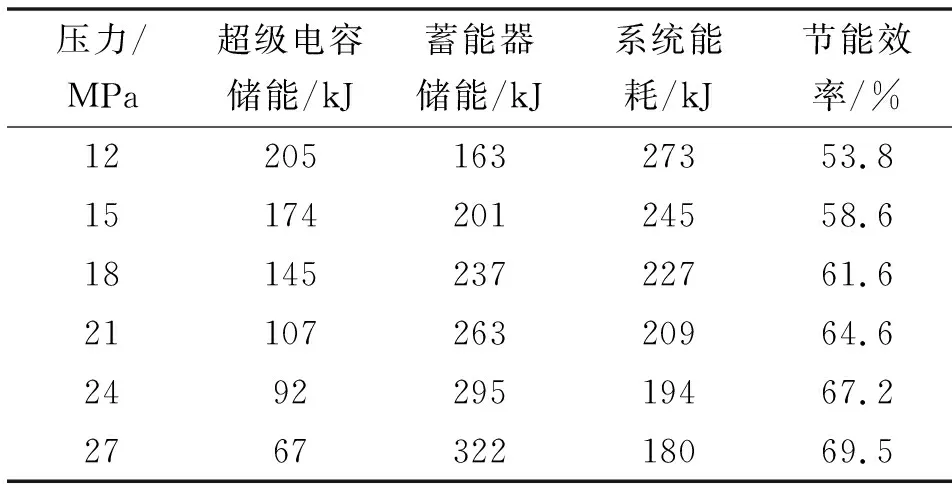
表1 蓄能器壓力對系統能量特性影響Tab.1 Influence of accumulator pressure on the energy of the system
設置蓄能器壓力18 MPa,圖7所示為蓄能器容積不同時,超級電容電量變化曲線。由于蓄能器容積越大,動臂舉升和下放過程中,蓄能器壓力變化越平緩,蓄能器平均壓力越高。蓄能器油液體積變化相同時,蓄能器充液與放液過程的功率和能量越大。由圖7可看出:蓄能器容積越大,動臂舉升階段超級電容電量消耗越小,動臂舉升階段超級電容電量增加也越小。整體而言,蓄能器容積變化引起的超級電容電流變化較小。
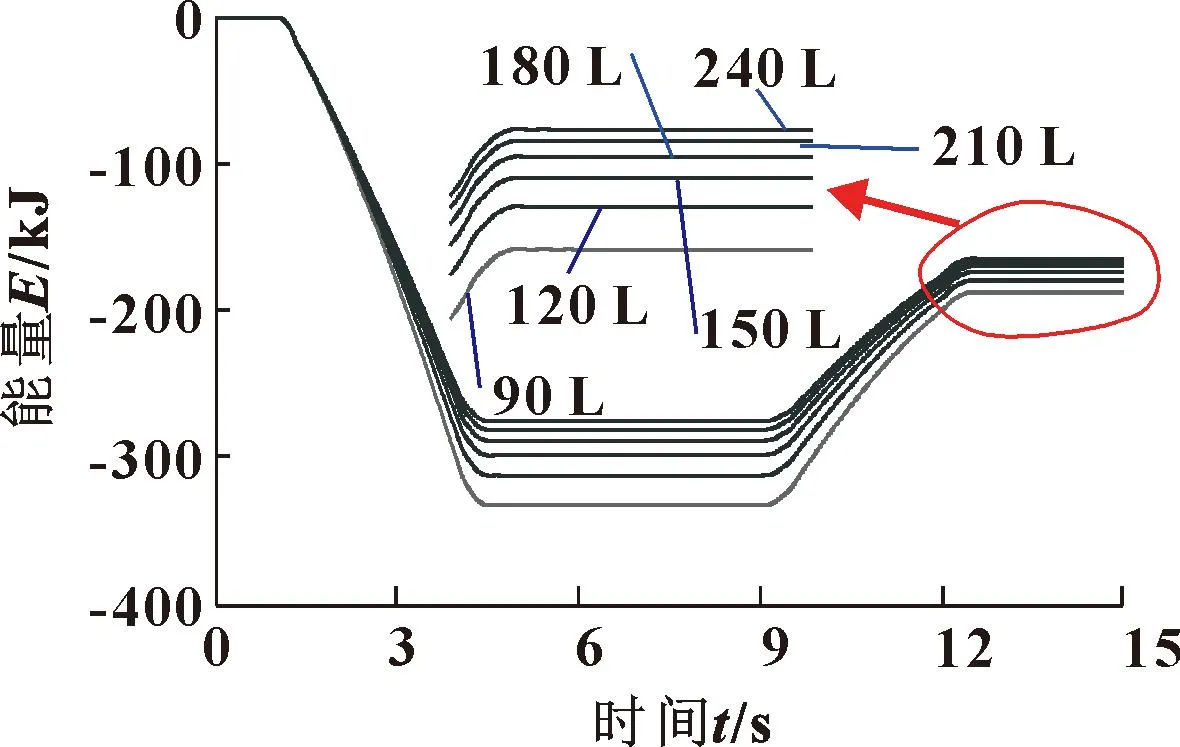
圖7 蓄能器容積對超級電容電量影響Fig.7 Influence of accumulator volume on the energy of the super-capacitor
表2所示為蓄能器容積對系統能量特性的影響規律。當蓄能器容積由90 L增大到240 L時,蓄能器回收的重力勢能由225 kJ增加到了266 kJ,單位容積變化引起的重力勢能回收量變化為0.27 kJ/L。隨著蓄能器壓力的升高,變轉速雙泵直驅系統能耗由227 kJ減少為203 kJ,節能效率為61.6%~65.7%。
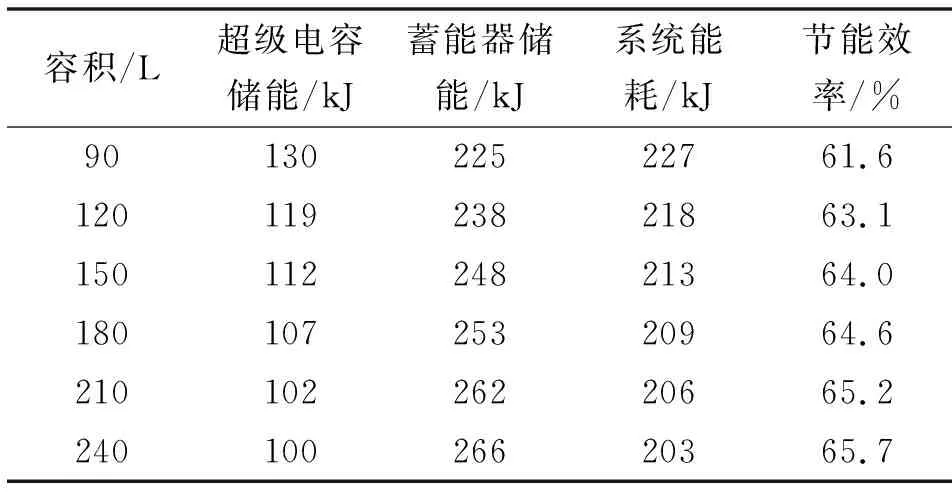
表2 蓄能器容積對系統能量特性影響Tab.2 Influence of accumulator volume on the energy of the system
5 結論
針對電動挖掘機高能效驅動需求,提出了一種變轉速雙泵直驅挖掘機動臂混合儲能系統,分析了系統運行特性和能量特性,得到了以下結論:
(1)通過合理配置2個液壓泵/馬達排量,雙泵直驅挖掘機動臂系統可獲得良好的控制特性,速度超調和波動小,控制平穩。
(2)通過大幅減小液壓閥節流損失、高效回收與利用工作裝置重力勢能,雙泵直驅挖掘機動臂系統可獲得良好的節能效果,當蓄能器壓力為21 MPa、容積為180 L時,重力勢能回收效率為79.9%,與傳統多路閥控系統相比,可減少能耗64.6%。
(3)蓄能器壓力和容積對雙泵直驅挖掘機動臂系統能量特性影響較大,當蓄能器壓力由12 MPa增大至27 MPa時,系統節能效率由53.8%提高至69.5%。當蓄能器容積由90 L增大至240 L時,系統節能效率由61.6%提升至65.7%。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32