基于擴(kuò)展觀測器的永磁同步電機(jī)快速積分終端滑模控制
2024-01-16 06:20:56陸園朱其新朱永紅
機(jī)床與液壓 2023年24期
陸園,朱其新,朱永紅
(1.蘇州科技大學(xué)電子與信息工程學(xué)院,江蘇蘇州 215009;2.蘇州科技大學(xué)機(jī)械工程學(xué)院,江蘇蘇州 215009;3.蘇州市共融機(jī)器人技術(shù)重點(diǎn)實(shí)驗(yàn)室,江蘇蘇州 215009;4.景德鎮(zhèn)陶瓷大學(xué)機(jī)電工程學(xué)院,江西景德鎮(zhèn) 333001)
0 前言
永磁同步電機(jī)由于結(jié)構(gòu)簡單、質(zhì)量輕、體積小、運(yùn)行可靠、散熱良好、易于人工維護(hù)、傳輸效率高等優(yōu)點(diǎn),已廣泛應(yīng)用于高精度數(shù)控機(jī)床、機(jī)器人、航空航天等領(lǐng)域[1-3]。由于電機(jī)模型的非線性,參數(shù)失配和轉(zhuǎn)矩脈動降低了伺服控制系統(tǒng)的跟蹤精度和穩(wěn)定性。同時,常規(guī)的控制方法(PI控制)易受到外部干擾和內(nèi)部參數(shù)不確定性的影響,從而使控制系統(tǒng)偏離期望目標(biāo)。
因此,在PMSM中已經(jīng)有多種非線性控制方法,例如滑模控制(Sliding Mode Control,SMC)[3]、自抗擾控制[4]、自適應(yīng)控制[5]、預(yù)測控制[6-7]和狀態(tài)反饋控制[8-9]。在這些控制方案中,SMC策略備受關(guān)注。SMC是一種非線性魯棒方法,與其他高級控制方法相比,它保留了相對簡單的設(shè)計(jì)和實(shí)現(xiàn)過程[10]。基于SMC強(qiáng)大的魯棒性、實(shí)現(xiàn)簡單、對匹配參數(shù)的擾動不敏感等優(yōu)點(diǎn),可以通過頻繁切換系統(tǒng)結(jié)構(gòu)抑制系統(tǒng)參數(shù)變化和外部干擾來實(shí)現(xiàn)系統(tǒng)的高性能控制[11-12]。
為實(shí)現(xiàn)有限時間收斂,ZAK[13]和MAN、YU[14]提出了終端滑模控制(Terminal Silding Mode Contral,TSMC)和積分終端滑模控制(Integral Terminal Silding Mode Contral,ITSMC)。CHIU[15]引入了符號和分?jǐn)?shù)積分終端模型,提出了不確定模型的積分終端滑模控制,并通過在遞歸結(jié)構(gòu)中結(jié)合導(dǎo)數(shù)和積分終端滑模,提出了2種導(dǎo)數(shù)-積分終端滑模控制方法,實(shí)現(xiàn)了高階MIMO系統(tǒng)的有限時間收斂,避免了控制器中的奇異問題。TSMC和ITSMC方法在機(jī)器人控制中[13,16]已經(jīng)得到了廣泛的應(yīng)用。此外,在存在不匹配干擾的情況下,TSMC的瞬態(tài)性能較差。LI 等[17-19]提出的ITSMC,通過在滑模變量中添加積分項(xiàng)設(shè)計(jì)終端滑模面,并實(shí)現(xiàn)有限時間收斂,同時仍保留SMC的魯棒特性。CHANG等[20]通過創(chuàng)新分?jǐn)?shù)誤差積分,在沒有奇異問題的情況下,可以實(shí)現(xiàn)跟蹤誤差和積分誤差的有限時間收斂。 LI等[17]的研究表明:可以保證系統(tǒng)狀態(tài)到達(dá)滑模面,然后在有限的時間內(nèi)收斂到原點(diǎn),同時通過使用ITSMC消除奇異性問題。ULLAH等[21]提出了匹配不確定性下運(yùn)行的四軸飛行器的完整飛行軌跡跟蹤控制律。LABBADI、 CHERKAOUI[22]設(shè)計(jì)了用于姿態(tài)控制的魯棒ITSMC控制器以及用于位置和高度的自適應(yīng)Backstepping。為了提高收斂速度和精度,LABBADI、 CHERKAOUI[23]在隨機(jī)外部干擾和參數(shù)不確定性的情況下,研究自適應(yīng)分?jǐn)?shù)階非奇異快速終端滑模控制器的無人機(jī)。
為了進(jìn)一步提高永磁同步電機(jī)調(diào)速系統(tǒng)的動態(tài)性能,本文作者提出一種快速積分終端滑模面(Fast Integral Terminal Sliding Mode Control,F(xiàn)ITSMC),以提高傳統(tǒng)積分終端滑模控制在速度誤差遠(yuǎn)離平衡點(diǎn)時的跟蹤誤差收斂速度。然后,考慮到負(fù)載擾動的影響,設(shè)計(jì)一種基于雙曲正切函數(shù)(Hyperbolic Tangent Function,HTF)的擴(kuò)展?fàn)顟B(tài)觀測器(Extended State Observer,ESO)觀測擾動,并將它作為前饋補(bǔ)償部分加入到 FITSMC。
1 PMSM數(shù)學(xué)模型
PMSM調(diào)速系統(tǒng)在d-q旋轉(zhuǎn)坐標(biāo)系中的定子電流方程表示為
(1)
其中:ud、uq和id、iq分別表示d和q軸的電壓和電流;R表示定子電阻;L表示定子電感;ed、eq表示電機(jī)反電動勢。
(2)
其中:Ld和Lq分別表示d軸和q軸電感;ωe、ωr分別表示電角速度和機(jī)械角速度;P是電機(jī)的極數(shù)。
PMSM的機(jī)械運(yùn)動方程寫為
(3)
其中:J表示轉(zhuǎn)動慣量;TL表示負(fù)載轉(zhuǎn)矩;B表示黏度系數(shù);Te表示電磁轉(zhuǎn)矩。對于表面貼裝PMSM,電磁轉(zhuǎn)矩Te可以表示為
Te=1.5Pψfiq
(4)
2 ESO的設(shè)計(jì)
設(shè)對象為如下有擾動作用的非定常系統(tǒng):
(5)
其中:
f(x1,x2,t)=-(1+cost/2)x1-(1+
sin(t/3))x2;
(6)
w(t)=sign(sin(3t/2))
取狀態(tài)觀測器為
(7)
其中:
采用雙曲正切函數(shù)(Hyperbolic Tangent Function,HTF)代替fal函數(shù)。由于雙曲正切函數(shù)為奇函數(shù),在(-∞,+∞)內(nèi)為單調(diào)遞增函數(shù)并且光滑連續(xù),其值域具有飽和特性,其導(dǎo)數(shù)為1/cosh2x,恒不為0。
在x=0的鄰域內(nèi),如圖1所示,雙曲正切函數(shù)可近似為線性函數(shù),且斜率較小,在誤差范圍內(nèi)可以兼顧濾波與觀測效果。
對于式(5)的非定常系統(tǒng),采用不同的函數(shù)進(jìn)行對比,如圖2所示,2種不同的函數(shù)都可以有效地跟蹤原始曲線。
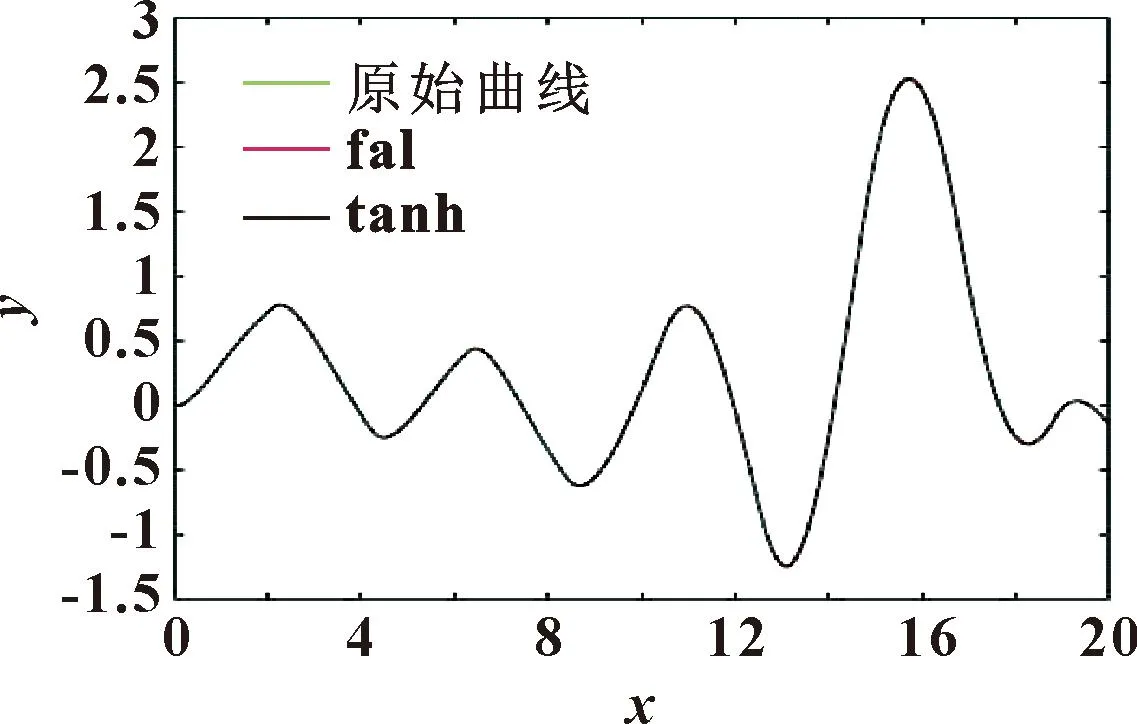
圖2 HTF與fal觀測效果Fig.2 HTF and fal observational effects
將圖2局部放大后得到圖3,可以看出:HTF的觀測效果優(yōu)于fal的觀測效果。因此,使用HTF代替fal函數(shù)是可行的。
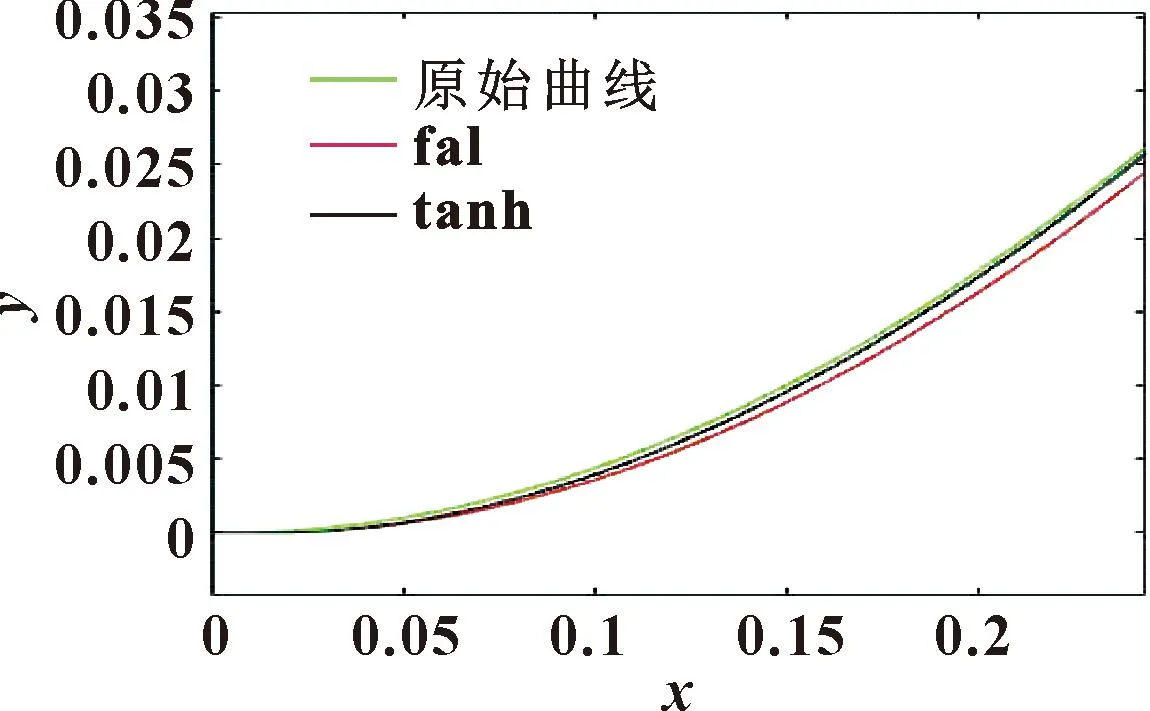
圖3 圖2的局部放大Fig.3 Partial enlarged view of Fig.2
3 FITSMC的設(shè)計(jì)
當(dāng)考慮參數(shù)不確定性的影響時,PMSM的運(yùn)動方程可以表示為
(8)

選取參數(shù)g和d,其表達(dá)式如下:
(9)
等式(8)可以改寫為
(10)
其中:g采用自適應(yīng)律估計(jì),負(fù)載擾動d采用ESO和前饋觀測,以獲得更好的控制效果。假設(shè)一階系統(tǒng)狀態(tài)方程表示為
(11)
其中:h是一個大于零的常數(shù);f(x1)表示有界非線性擾動函數(shù);u(t)是控制輸入。

(12)
(13)
由參考文獻(xiàn)[24]可知:PMSM 的速度反饋信號由z1觀察,負(fù)載擾動轉(zhuǎn)矩d由z2觀察,可以實(shí)現(xiàn)干擾的補(bǔ)償。另外,根據(jù)參考文獻(xiàn)[24]中的參數(shù)選擇原則,可以選擇參數(shù)β1、β2、β3且滿足β1-β2β3>0。
速度跟蹤誤差定義為
(14)

則速度跟蹤誤差方程的變化規(guī)律可表示為
(15)
文中以速度跟蹤誤差e為自變量,選取積分滑模面為
dτ
(16)
為對比不同滑模面的效果,選取:
(17)
其中:q1、q2是滿足q2>q1>0的奇數(shù);α>0;β>0。
為了加快逼近過程并抑制滑模表面的顫振,選擇終端滑模逼近律。終端滑模趨近律表示為
(18)
同時選取新趨近律(New Reaching Law Sliding Mode Control,NRSMC):
(19)
其中:m、n是正數(shù),且0<λ<1。可以得到速度環(huán)控制器的輸出信號,結(jié)合式(15)(16)(18)得到q軸電流參考值:
αsgn(e)+β|e|q1/q2sgn(e)]
(20)

(21)
4 穩(wěn)定性分析
(22)
結(jié)合式(16)可以變?yōu)?/p>
=-s[m|s|λsgn(s)+ns]≤0
(23)

5 系統(tǒng)仿真
為驗(yàn)證文中提出方法的可行性,基于MATLAB/Simulink搭建了永磁同步電機(jī)控制系統(tǒng)的仿真模型。
基于FITSMC+ESO的PMSM調(diào)速系統(tǒng)仿真框圖如圖4所示。可以看出:ESO 估計(jì)負(fù)載擾動并將結(jié)果補(bǔ)償?shù)剿俣瓤刂破鱂ITSMC中,而SMSC代替了傳統(tǒng)速度環(huán)中的 PI 控制器。設(shè)定電機(jī)的參數(shù)見表1。
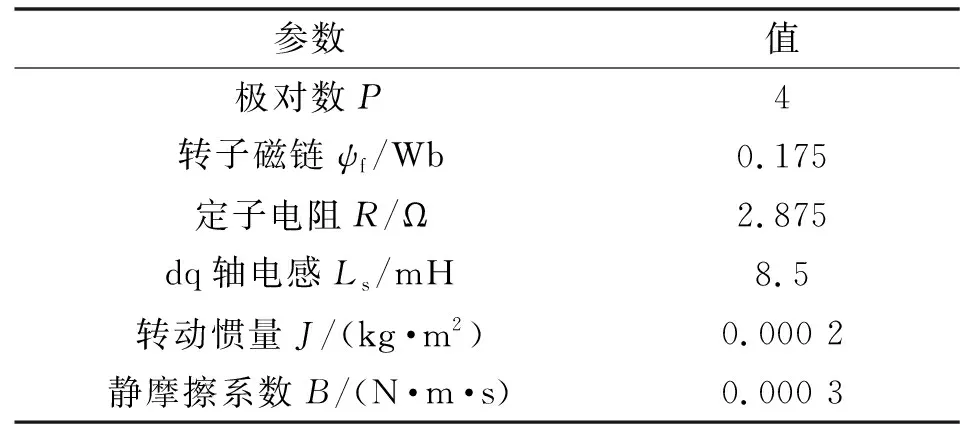
表1 電機(jī)參數(shù)Tab.1 Motor parameters
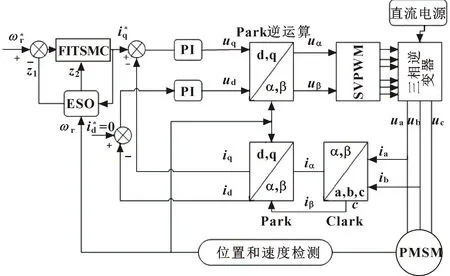
圖4 PMSM調(diào)速系統(tǒng)框圖Fig.4 Block diagram of PMSM speed-regulation system
仿真參數(shù)設(shè)定為:α=100,β1=160,β2=160,β3=0.85,q1=3,q2=5,k=55,m=2,β=0.3,n=55。
仿真分為2組:第一組模擬時間設(shè)定為0.4 s,給定速度為1 000 r/min;另一組模擬時間也為0.4 s,給定速度為1 000 r/min,但在0.2 s時加入負(fù)載。
第一組仿真參數(shù)模擬結(jié)果如圖5-6所示,可以看出:與傳統(tǒng)的SMC和NRSMC相比,ESO+FITSMC達(dá)到穩(wěn)定運(yùn)行狀態(tài)的時間更短,超調(diào)更小,能更快到達(dá)穩(wěn)定狀態(tài);相比之下,傳統(tǒng)的SMC具有較大的超調(diào)量,NRSMC的效果居中。從圖6中可以看出:FITSMC到達(dá)穩(wěn)定只需要0.007 4 s,NRSMC到達(dá)穩(wěn)定需要0.010 2 s,SMC到達(dá)穩(wěn)定需要0.010 4 s。同時,當(dāng)達(dá)到穩(wěn)定時ESO+FITSMC的抖振為10 r/min,抖振較小。因此,基于FITSMC+ESO的系統(tǒng)具有良好的動態(tài)性能和較強(qiáng)的魯棒性。
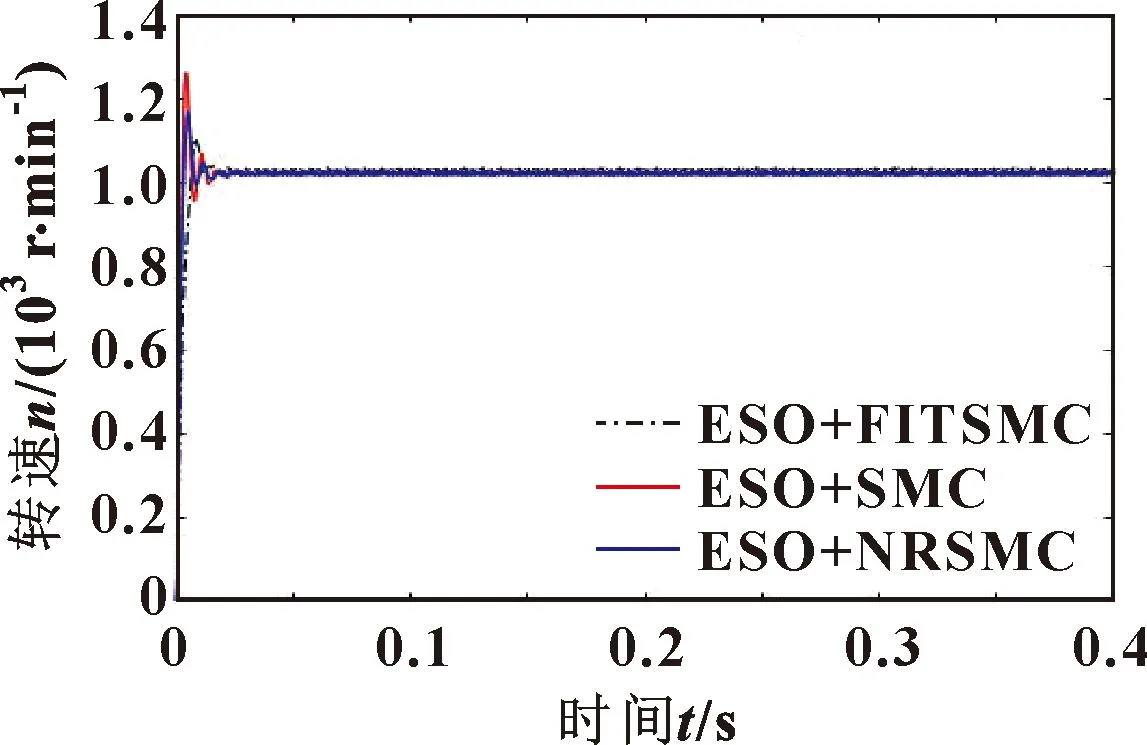
圖5 不同SMC在1 000 r/min下的仿真結(jié)果Fig.5 Simulation results of different SMC at 1 000 r/min
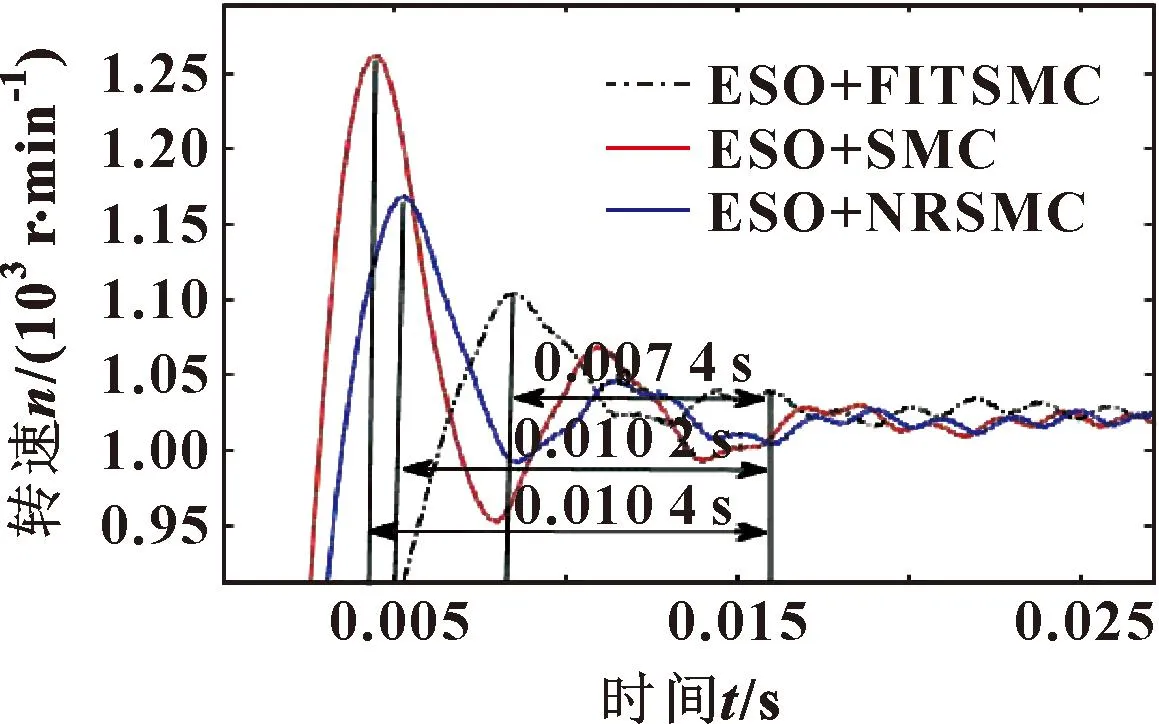
圖6 圖5的局部放大Fig.6 Partial enlarged view of Fig.5
圖7所示為不同函數(shù)的觀測效果,可以看出:tanhESO具有較小的超調(diào),且更快地到達(dá)給定的速度,進(jìn)一步驗(yàn)證了對于ESO的改進(jìn)是可行的。
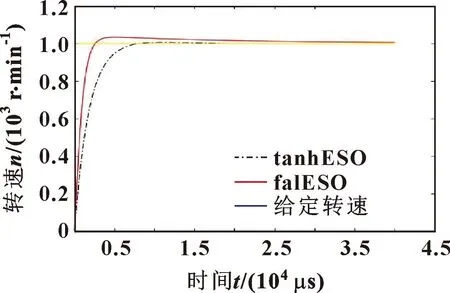
圖7 tanh與fal函數(shù)對比Fig.7 Function comparison of tanh and fal
第二組仿真參數(shù)模擬效果如圖8-9所示,可以看出:ESO+FITSMC空載運(yùn)行時的效果和圖5、6的效果相同,它在更短的時間內(nèi)達(dá)到給定速度,且具有小超調(diào)。從圖9中可以看出:在0.2 s時突加負(fù)載,ESO+FITSMC能夠更快地反應(yīng),且只需要0.002 s就能調(diào)整到給定值;此外,轉(zhuǎn)速只下降了40 r/min。實(shí)驗(yàn)結(jié)果驗(yàn)證了所提出的ESO+FITSMC對干擾具有更好的魯棒性。
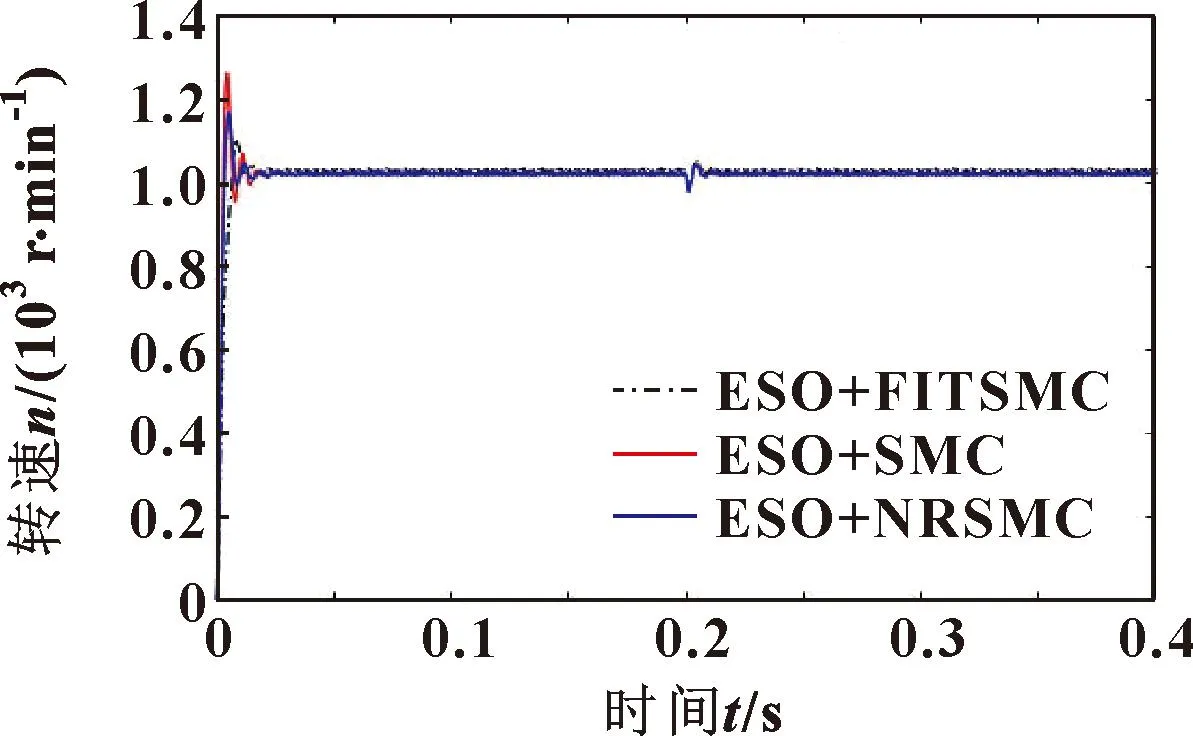
圖8 0.2 s突加負(fù)載時不同SMC在1 000 r/min下仿真結(jié)果Fig.8 Simulation results of different SMC at 1 000 r/min under 0.2 s sudden load
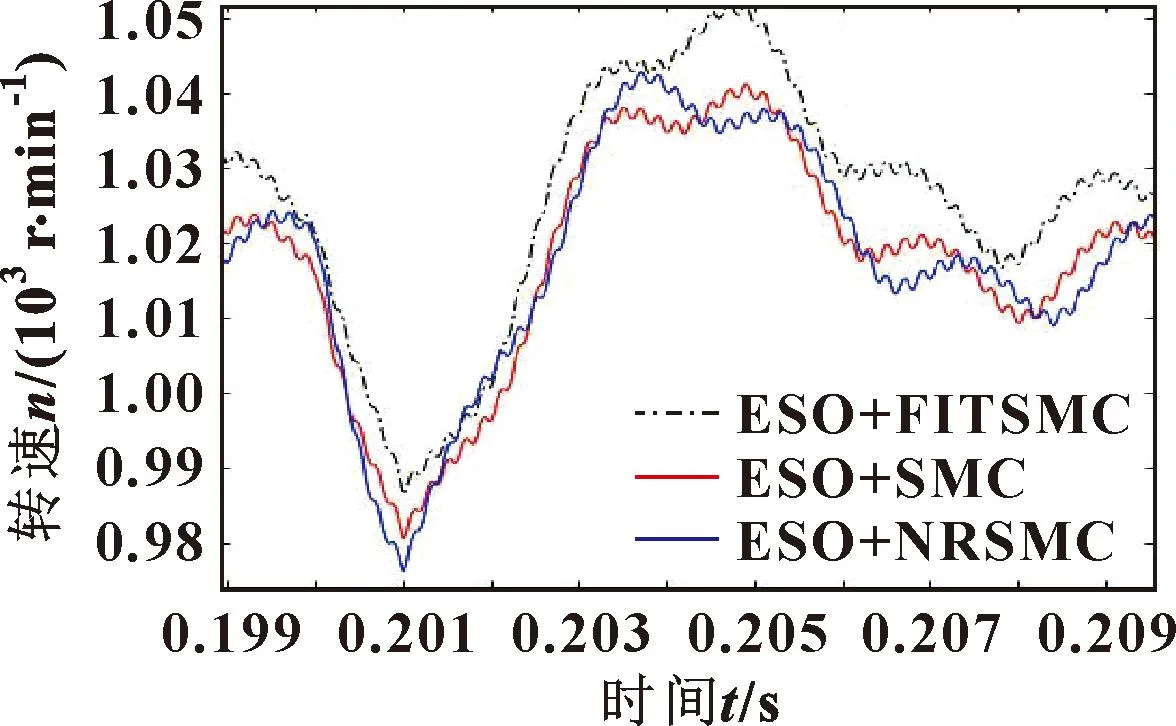
圖9 圖8的局部放大Fig.9 Partial enlarged view of Fig.8
6 結(jié)論
文中提出的FITSMC控制器在跟蹤誤差遠(yuǎn)離平衡點(diǎn)時提供了更快的誤差收斂速度。基于雙曲正切函數(shù)的ESO估計(jì)負(fù)載擾動,并將它作為前饋補(bǔ)償添加到速度控制器FITSMC中,采用FITSMC替代傳統(tǒng)的PI控制器可以有效地降低動態(tài)速度跟蹤誤差。通過與傳統(tǒng)方法進(jìn)行比較,驗(yàn)證了所提方法(FITSMC+ESO)的優(yōu)越性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年8期)2016-10-09 02:11:50