基于三維反演重構(gòu)的微波著陸系統(tǒng)飛行校驗(yàn)評(píng)估方法
2024-01-22 03:23:56史曉鋒
關(guān)鍵詞:信號(hào)
羅 瀟,史曉鋒
(北京航空航天大學(xué)電子信息工程學(xué)院,北京 100191)
飛行校驗(yàn)是保障航空運(yùn)輸安全必不可少的技術(shù)手段,其旨在檢查和評(píng)估各種導(dǎo)航、雷達(dá)、通信等設(shè)備的空間信號(hào)質(zhì)量及其容限。微波著陸系統(tǒng)(microwave landing system,MLS)作為一種新型著陸引導(dǎo)系統(tǒng),目前主要用于軍用航空領(lǐng)域,可在一廣闊的覆蓋區(qū)內(nèi)提供位置信息,并以方位角、仰角和距離進(jìn)行度量。相較于目前機(jī)場(chǎng)廣泛使用的儀表著陸系統(tǒng)(instrument landing system,ILS),其適應(yīng)性強(qiáng)、覆蓋范圍廣、制導(dǎo)精度高。面對(duì)日益復(fù)雜的空中交通情況,MLS 在民用航空領(lǐng)域具有廣闊的發(fā)展前景。在著陸引導(dǎo)系統(tǒng)飛行校驗(yàn)的研究領(lǐng)域,李小強(qiáng)等[1]提出了一種基于雙VDB 臺(tái)站的衛(wèi)星導(dǎo)航地面增強(qiáng)系統(tǒng)飛行校驗(yàn)方法,陸永東等[2]對(duì)儀表著陸系統(tǒng)飛行校驗(yàn)方法進(jìn)行深入的對(duì)比研究,Yang 等[3]提出一種基于模糊集決策的ILS 飛行校驗(yàn)中的參數(shù)異常檢測(cè)方法,但針對(duì)MLS 飛行校驗(yàn)和測(cè)試評(píng)估方法在國(guó)內(nèi)民用航空領(lǐng)域尚未完善。本文依據(jù)國(guó)際標(biāo)準(zhǔn)對(duì)MLS 的飛行校驗(yàn)進(jìn)行研究,分析了校驗(yàn)關(guān)鍵參數(shù)及其容限要求、校驗(yàn)基準(zhǔn)的選取以及飛行科目設(shè)計(jì),同時(shí)針對(duì)MLS 飛行校驗(yàn)過(guò)程中可能出現(xiàn)空間信號(hào)漏檢等問(wèn)題,提出一種基于有限稀疏樣本條件下利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對(duì)MLS 場(chǎng)型進(jìn)行三維反演重構(gòu)的方法,實(shí)現(xiàn)了MLS 完整空間信號(hào)場(chǎng)型評(píng)估。
1 MLS 飛行校驗(yàn)
1.1 關(guān)鍵參數(shù)與容限要求
MLS 作為用于引導(dǎo)飛機(jī)著陸的系統(tǒng),對(duì)其進(jìn)行飛行校驗(yàn),關(guān)鍵在于評(píng)估MLS 系統(tǒng)引導(dǎo)著陸的精度是否符合要求。對(duì)MLS 的系統(tǒng)誤差進(jìn)行分析,其輸出信號(hào)的角頻率分為航道跟隨誤差(path following error,PFE)和控制運(yùn)動(dòng)噪聲(control motion noise,CMN)。航道跟隨誤差包含航道跟隨噪聲和平均航向道誤差或平均下滑道誤差,是由系統(tǒng)或設(shè)備提供的角度和距離數(shù)據(jù)誤差中的慢變化(頻率較低)成分,這種成分的誤差屬于可能引起飛機(jī)偏離預(yù)定航向道和/或下滑道的引導(dǎo)信號(hào)誤差分量,其指預(yù)定飛行航跡和實(shí)際飛行航跡(按引導(dǎo)信號(hào)飛行時(shí))之間的偏差。控制運(yùn)動(dòng)噪聲則是指由系統(tǒng)或設(shè)備所提供的角度和距離數(shù)據(jù)誤差中的快變化成分(頻率較高),這種成分的誤差會(huì)導(dǎo)致飛機(jī)舵面和操縱桿的抖動(dòng),當(dāng)CMN 過(guò)大時(shí),說(shuō)明飛機(jī)飛行不平穩(wěn)。
為獲得PFE 和CMN,需要對(duì)誤差分量進(jìn)行解構(gòu)剝離。根據(jù)飛機(jī)著陸過(guò)程的動(dòng)態(tài)響應(yīng)特征,通過(guò)轉(zhuǎn)折頻率為10 弧度/秒的低通濾波器可以獲得PFE 和CMN 分量。其中PFE 包括小于或等于0.5 弧度/秒的方位誤差成分和小于或等于1.5 弧度/秒的仰角誤差成分;CMN 則包括那些處于0.3~10 弧度/秒范圍內(nèi)的方位誤差成分和處于0.5~10 弧度/秒范圍的仰角誤差成分[4]。具體測(cè)量濾波器配置如圖1 所示。
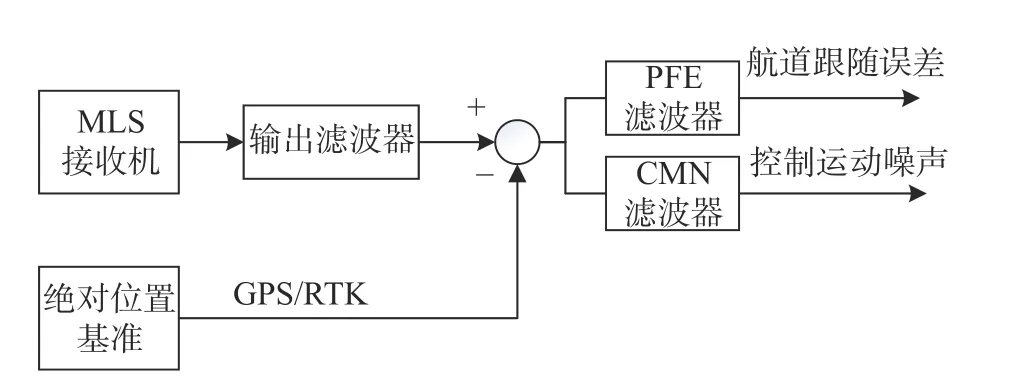
圖1 濾波器配置Fig.1 Filter configuration
PFE 和CMN 可以直接反映飛機(jī)著陸過(guò)程中的制導(dǎo)誤差和舵面響應(yīng),因此評(píng)估這兩個(gè)參數(shù)在空間內(nèi)的分布是否符合容限要求是MLS 飛行校驗(yàn)的關(guān)鍵。為獲得PFE 和CMN 在空間的容限分布,本文基于ICAO 8 071 附件十[5]以及FAA8200 飛行校驗(yàn)規(guī)范手冊(cè)[6],分析MLS 覆蓋區(qū)內(nèi)的誤差評(píng)估方法。其中在MLS 系統(tǒng)引導(dǎo)著陸的過(guò)程中,系統(tǒng)在跑道入口處的精度決定了著陸質(zhì)量,因此跑道入口處是精度的主要測(cè)量點(diǎn)。以方位制導(dǎo)為例,MLS 信號(hào)的覆蓋范圍如圖2 所示。在跑道入口和跑道中線的交叉點(diǎn)上方定義了一個(gè)“MLS 基準(zhǔn)點(diǎn)”。當(dāng)飛機(jī)進(jìn)入MLS 覆蓋范圍時(shí),都以此點(diǎn)作為基準(zhǔn),覆蓋范圍內(nèi)的其余地方精度要求隨著距離或偏移角度增大而降低,即PFE 和CMN 的容限將隨著離基準(zhǔn)點(diǎn)的距離、橫向偏移角度和仰角而變化。同時(shí),按照規(guī)范要求,其變化規(guī)律與距離或偏移角度呈線性關(guān)系。
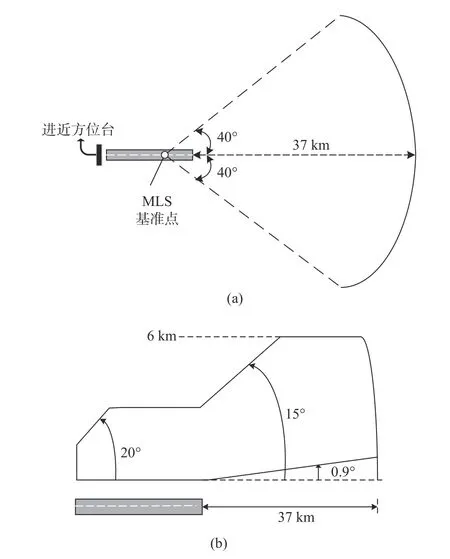
圖2 MLS 方位制導(dǎo)覆蓋圖Fig.2 MLS azimuth coverage
本文結(jié)合PFE 和CMN 在基準(zhǔn)點(diǎn)處的容限要求以及跑道路口以外的降級(jí)容限要求,推算PFE 和CMN 在整個(gè)覆蓋空間內(nèi)的容限分布。進(jìn)近基準(zhǔn)點(diǎn)處的容限要求如表1 所示(距離形式)。
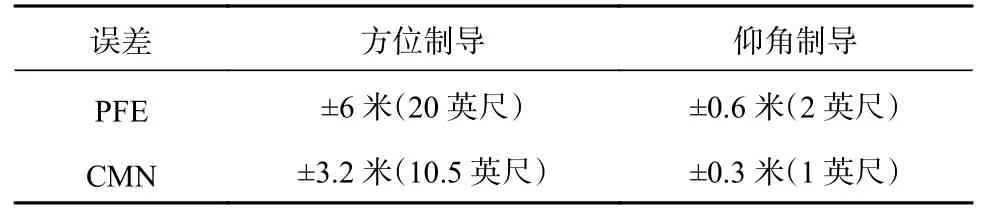
表1 進(jìn)近基準(zhǔn)點(diǎn)處容限要求Tab.1 Tolerance requirements at approach reference points
具體步驟如下。首先將基準(zhǔn)點(diǎn)處的容限值根據(jù)方位天線到基準(zhǔn)數(shù)據(jù)點(diǎn)的距離轉(zhuǎn)為極坐標(biāo)形式
式中:θ為基準(zhǔn)點(diǎn)處PFE/CMN 以角度形式的容限值,(°);Tf為PFE/CMN 以距離形式的容限值,m;D為從方位天線到基準(zhǔn)數(shù)據(jù)點(diǎn)的距離,m;k為米和英尺的轉(zhuǎn)換系數(shù)。
在極坐標(biāo)形式下,根據(jù)MLS 在跑道路口以外的衰減系數(shù),可以得到覆蓋范圍內(nèi)任意測(cè)量點(diǎn)處PFE/CMN容限值的分布函數(shù)為
式中:θ0為測(cè)量點(diǎn)處的容限值,(°);r為測(cè)量點(diǎn)距離基準(zhǔn)點(diǎn)的距離,海里;θp為橫向偏移角度,(°);θt為仰角,(°);θm為規(guī)定的最低下滑道角度,(°)。
1.2 校驗(yàn)基準(zhǔn)選取
校驗(yàn)基準(zhǔn)的選取直接關(guān)系到飛行校驗(yàn)的可靠性及穩(wěn)定性。飛行校驗(yàn)過(guò)程中飛機(jī)需要按照飛行科目采集規(guī)定路徑上的信號(hào)數(shù)據(jù)。由于外界干擾,校驗(yàn)飛機(jī)在飛行過(guò)程中很容易發(fā)生航跡偏移,導(dǎo)致出現(xiàn)飛行誤差,從而影響飛行校驗(yàn)的結(jié)果。為確保在不同位置獲得準(zhǔn)確的空間信息,需要選取合適的校驗(yàn)基準(zhǔn)以建立空間信號(hào)采樣的基準(zhǔn)刻度。
根據(jù)ICAO 8 071 的飛行校驗(yàn)理論,校驗(yàn)精度(即校驗(yàn)基準(zhǔn)精度)應(yīng)至少為被校設(shè)備系統(tǒng)精度的3 倍[7]。考慮MLS 屬于精密進(jìn)近著陸引導(dǎo)系統(tǒng),因此需要更高精度的空間定位技術(shù)作為校驗(yàn)的基準(zhǔn),如GPS/RTK 技術(shù),其定位精度可達(dá)到厘米級(jí),遠(yuǎn)遠(yuǎn)高于MLS 精度的3 倍以上。
1.3 飛行科目設(shè)計(jì)
選取合理的校驗(yàn)基準(zhǔn)可以計(jì)算飛行校驗(yàn)中的關(guān)鍵參數(shù),設(shè)計(jì)不同的飛行科目可以對(duì)不同航道上的關(guān)鍵校驗(yàn)參數(shù)進(jìn)行采樣。飛行科目的設(shè)計(jì)需要考慮整個(gè)測(cè)試區(qū)域的地形、地貌、氣象等因素以及被校設(shè)備的工作范圍,同時(shí)應(yīng)盡量減少飛機(jī)在空域的暴露時(shí)間以保證飛行安全。MLS 不同于ILS 的單一航道進(jìn)近,其支持曲線進(jìn)近、分段進(jìn)近等。MLS 飛行校驗(yàn)過(guò)程中,飛行科目包含的航道始終有限,只能獲得有限的稀疏離散信號(hào),難以對(duì)完整空間信號(hào)場(chǎng)型進(jìn)行評(píng)估。因此,需要使獲得的有限稀疏信號(hào)在空間中分布具有更強(qiáng)的空間相關(guān)性,進(jìn)而推算出MLS 校驗(yàn)參數(shù)在整個(gè)覆蓋區(qū)中的分布。設(shè)計(jì)合理的飛行科目以實(shí)現(xiàn)后續(xù)的場(chǎng)型反演重構(gòu)尤為重要。
考慮MLS 信號(hào)覆蓋范圍(如圖2 所示),其包含跑道中心線±40°,垂直面0~15°、距離基準(zhǔn)點(diǎn)0~20 海里的扇形區(qū)域,因此飛行科目的設(shè)計(jì)在仰角上必須盡可能多地包含不同角度的下滑道,同時(shí)在方位制導(dǎo)上必須盡可能包括不同的橫向偏移角度。本文結(jié)合FAA 8 200 中對(duì)MLS 的飛行校驗(yàn)規(guī)范,設(shè)計(jì)了一項(xiàng)包含多段航線的MLS 飛行科目,其飛行航跡如圖3 所示,其中包括3°下滑角正直對(duì)準(zhǔn)/斜對(duì)準(zhǔn)航道、6°下滑角正直對(duì)準(zhǔn)/斜對(duì)準(zhǔn)航道、徑向水平飛行以及多段不同距離的圓周飛行。
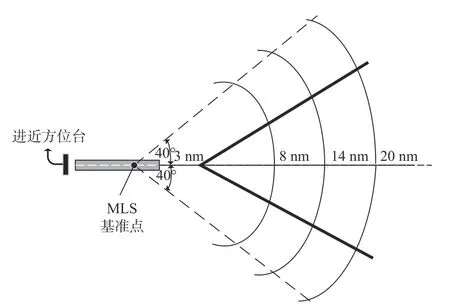
圖3 飛行科目示意圖Fig.3 Schematic diagram of flight subjects
2 三維空間信號(hào)場(chǎng)型反演重構(gòu)
盡管設(shè)計(jì)的飛行科目包含多段航線,但相較于廣闊的MLS 信號(hào)覆蓋范圍,校驗(yàn)過(guò)程中采集的數(shù)據(jù)仍然是稀疏信號(hào),其本身就存在空間信號(hào)漏檢的可能;因此,常規(guī)的飛行校驗(yàn)測(cè)試評(píng)估方法難以實(shí)現(xiàn)MLS 完整三維空間信號(hào)場(chǎng)型評(píng)估。在雷達(dá)信號(hào)、圖像處理等領(lǐng)域,空間插值技術(shù)被廣泛用于數(shù)據(jù)處理中,其可根據(jù)已知的稀疏樣本數(shù)據(jù)點(diǎn)經(jīng)過(guò)插值實(shí)現(xiàn)數(shù)據(jù)反演重構(gòu)。基于MLS 的精度要求以及校驗(yàn)參數(shù)依賴于距離的分布特點(diǎn),本文采用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)插值法。利用采集的稀疏樣本作為訓(xùn)練集,可在大范圍內(nèi)實(shí)現(xiàn)高精度的插值[8],從而實(shí)現(xiàn)MLS 三維空間信號(hào)場(chǎng)型反演重構(gòu)。
2.1 徑向基函數(shù)(RBF)神經(jīng)網(wǎng)絡(luò)
徑向基函數(shù)是一個(gè)取值僅僅依賴于離原點(diǎn)距離的實(shí)值函數(shù),或者還可以是到任意一點(diǎn)c的距離,c點(diǎn)稱為中心點(diǎn),也就是 Φ(x)=Φ(‖x-c‖)[9]。常用的徑向基函數(shù)包括以下函數(shù)。
Gaussian 函數(shù):
Reflected sigmoid 函數(shù):
式中:δ為函數(shù)的寬度參數(shù),可以控制函數(shù)的徑向作用范圍。
徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)是一種使用徑向基函數(shù)作為激活函數(shù)的人工神經(jīng)網(wǎng)絡(luò)。徑向基函數(shù)網(wǎng)絡(luò)的輸出是輸入的徑向基函數(shù)和神經(jīng)元參數(shù)的線性組合。其包含3 層神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),分別為輸入層、隱藏層、輸出層,只要隱藏層神經(jīng)元足夠多徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)(RBFNN)完全可以擬合任何一個(gè)函數(shù)。基于MLS 三維場(chǎng)型特點(diǎn),定義RBFNN 的拓?fù)浣Y(jié)構(gòu)的輸入層為3 個(gè)節(jié)點(diǎn),分別對(duì)應(yīng)曲面上點(diǎn)的坐標(biāo)值Pi(x,y,z),輸出層為一個(gè)節(jié)點(diǎn)對(duì)應(yīng)曲面上的點(diǎn)Pi(x,y,z)對(duì)應(yīng)的校驗(yàn)參數(shù)值。其網(wǎng)絡(luò)拓?fù)淠P腿鐖D4 所示。

圖4 網(wǎng)絡(luò)拓?fù)淠P虵ig.4 Network topology model
利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)進(jìn)行場(chǎng)型反演重構(gòu),即將空間中采集的稀疏數(shù)據(jù)點(diǎn)通過(guò)徑向基函數(shù)映射到高維空間中,然后進(jìn)行線性插值或擬合,得到空間內(nèi)缺失數(shù)據(jù)點(diǎn)的估計(jì)值。其學(xué)習(xí)過(guò)程[10-11]如下。
記X=[x,y,z]為采集的稀疏樣本數(shù)據(jù)點(diǎn)坐標(biāo),即為輸入層的輸入向量。設(shè)隱含層的節(jié)點(diǎn)個(gè)數(shù)為m,并記其徑向基函數(shù)向量為H=[h1,h2,···,hm]T,其中hi為選擇的徑向基函數(shù),表達(dá)式為
式中:X為輸入向量;Ci為第i個(gè)隱含層神經(jīng)元的中心向量;bi為神經(jīng)元節(jié)點(diǎn)的基寬度。
記第i個(gè)神經(jīng)元節(jié)點(diǎn)的中心向量為:Ci=[C1i,C2i,···,Cni]T,其中i=1,2,···,m。設(shè)構(gòu)建網(wǎng)絡(luò)基寬矢量為:B=[b1,b2,···,bm]T,其中bi為神經(jīng)元節(jié)點(diǎn)的基寬度,且均為正常數(shù)。設(shè)構(gòu)建網(wǎng)絡(luò)的權(quán)值向量為:W=[w1,w2,···,wm],則網(wǎng)絡(luò)在t時(shí)刻的輸出為
2.2 仿真驗(yàn)證
以方位制導(dǎo)的PFE 為樣本,對(duì)徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)三維空間信號(hào)場(chǎng)型反演重構(gòu)進(jìn)行仿真實(shí)驗(yàn),具體步驟如下。
1)模擬一組飛行校驗(yàn)過(guò)程中MLS 接收機(jī)采集的方位制導(dǎo)PFE 數(shù)據(jù),實(shí)際飛行測(cè)試過(guò)程中MLS 方位制導(dǎo)數(shù)據(jù)刷新率約為13 Hz,飛機(jī)進(jìn)近階段速度大約230 m/s,而MLS 覆蓋距離達(dá)到37 km,考慮干擾誤差等因素,一條航線能獲得大約1 000個(gè)有效空間采樣點(diǎn)。
2)將模擬的PFE 數(shù)據(jù)作為訓(xùn)練樣本,利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò),對(duì)覆蓋區(qū)內(nèi)未知航路點(diǎn)數(shù)據(jù)進(jìn)行推算,實(shí)現(xiàn)三維空間信號(hào)場(chǎng)型反演重構(gòu)。
3)分析重構(gòu)后的場(chǎng)型誤差。
設(shè)定機(jī)場(chǎng)情況為:方位臺(tái)距離基準(zhǔn)點(diǎn)7 965 英尺,機(jī)場(chǎng)規(guī)定的最低下滑角度為3°,在基準(zhǔn)點(diǎn)處方位制導(dǎo)的PFE 容限值為20 英尺。圖5 表示根據(jù)容限分布函數(shù)采樣獲得的PFE 樣本分布情況。圖6表示經(jīng)過(guò)三維場(chǎng)型反演重構(gòu)后PFE 在覆蓋區(qū)域的分布。圖7 表示反演重構(gòu)的數(shù)據(jù)與樣本數(shù)據(jù)之間的誤差。

圖5 PFE 樣本分布圖Fig.5 PFE sample distribution map

圖6 PFE 反演重構(gòu)后分布圖Fig.6 PFE distribution map after inversion reconstruction
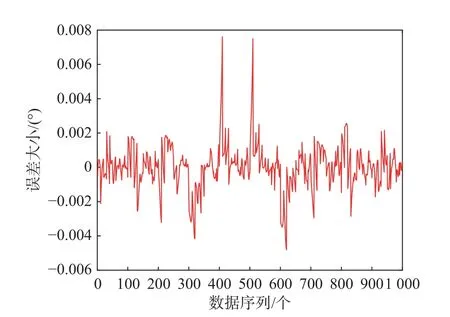
圖7 反演重構(gòu)的誤差Fig.7 Error of inversion reconstruction
仿真實(shí)驗(yàn)結(jié)果表明,利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的三維場(chǎng)型反演重構(gòu)能夠有效地描述PFE 在覆蓋區(qū)的分布情況。基于1 000 個(gè)稀疏樣本的訓(xùn)練,反演重構(gòu)后的數(shù)據(jù)與模擬數(shù)據(jù)誤差均在0.01°以內(nèi),根據(jù)設(shè)定的機(jī)場(chǎng)情況,其誤差轉(zhuǎn)化為距離形式大約為1.4 英尺(約0.4 m),遠(yuǎn)遠(yuǎn)小于表1 中FAA 8200 規(guī)定的20 英尺容限要求。同時(shí)實(shí)際飛行測(cè)試中,多段飛行航線采集的空間樣本數(shù)量遠(yuǎn)大于1 000,反演重構(gòu)的誤差能進(jìn)一步縮小。與傳統(tǒng)的飛行校驗(yàn)測(cè)試評(píng)估方法相比,該方法僅需要少量稀疏樣本信號(hào)就能對(duì)完整三維空間信號(hào)場(chǎng)型進(jìn)行評(píng)估,大大提高了MLS 飛行校驗(yàn)的精度和效率。
3 結(jié)論
本文對(duì)MLS 飛行校驗(yàn)方法進(jìn)行研究,得出以下結(jié)論。
1)針對(duì)尚未完善的規(guī)范要求,依據(jù)國(guó)際標(biāo)準(zhǔn)對(duì)校驗(yàn)中涉及的重點(diǎn)內(nèi)容進(jìn)行分析,為填補(bǔ)相關(guān)領(lǐng)域空白提供一定的借鑒。
2)針對(duì)飛行測(cè)試中采集的稀疏離散數(shù)據(jù)難以準(zhǔn)確評(píng)估場(chǎng)型的問(wèn)題,提出了一種利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)進(jìn)行三維場(chǎng)型反演重構(gòu)的方法。經(jīng)過(guò)仿真驗(yàn)證,三維反演重構(gòu)后航道跟隨誤差的重構(gòu)誤差大約為1.4 英尺,遠(yuǎn)小于FAA8200 飛行校驗(yàn)規(guī)范手冊(cè)規(guī)定的20 英尺的容限要求,為MLS 飛行校驗(yàn)中完整三維空間信號(hào)場(chǎng)型評(píng)估方法提供了新的思路。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
