多點(diǎn)定位接收機(jī)的設(shè)計(jì)與實(shí)現(xiàn)
2024-01-22 03:23:58湯新民
關(guān)鍵詞:信號(hào)
湯新民,李 帥,周 楊
(1.南京航空航天大學(xué)民航學(xué)院,江蘇 南京 211100;2.中國民航大學(xué)交通科學(xué)與工程學(xué)院,天津 300300)
隨著機(jī)場(chǎng)和航空器數(shù)量的增加,機(jī)場(chǎng)場(chǎng)面監(jiān)視問題變得越來越突出。目前,我國中小機(jī)場(chǎng)普遍缺乏有效的監(jiān)視手段。傳統(tǒng)的場(chǎng)面監(jiān)視雷達(dá)價(jià)格昂貴、精度受限且部署困難,而多點(diǎn)定位系統(tǒng)具有對(duì)現(xiàn)有的二次雷達(dá)和廣播式自動(dòng)相關(guān)監(jiān)視系統(tǒng)(automatic dependent surveillance-broadcast,ADSB)的應(yīng)答機(jī)信號(hào)的兼容性,無需額外的設(shè)備即可實(shí)現(xiàn)[1];因此,作為新型監(jiān)視技術(shù),多點(diǎn)定位系統(tǒng)已經(jīng)被世界上很多國家民航單位作為重點(diǎn)研究方向。經(jīng)過多年的研究和更新迭代,許多公司都推出了相應(yīng)的多點(diǎn)定位產(chǎn)品,如英國的Sensis 公司開發(fā)的多點(diǎn)無線監(jiān)視系統(tǒng),加拿大的Rannoch 公司開發(fā)的AirScene 系統(tǒng)等都開始在世界范圍內(nèi)的機(jī)場(chǎng)試用[2]。隨著技術(shù)的更新成熟,國內(nèi)外許多大型機(jī)場(chǎng)都開始裝配多點(diǎn)定位系統(tǒng),比如法蘭克福機(jī)場(chǎng)、迪拜國際機(jī)場(chǎng)、希斯羅機(jī)場(chǎng)、韓國釜山機(jī)場(chǎng)等[3]。
多點(diǎn)定位系統(tǒng)接收不同位置的地面站信號(hào)到達(dá)時(shí)間(time of arrival,TOA),通過計(jì)算不同地面站與主站之間的TDOA,解算出飛機(jī)位置[4-5]。文獻(xiàn)[6]提出使用GPS 作為參考時(shí)鐘,實(shí)現(xiàn)異地時(shí)鐘同步,但精度受限于GPS 時(shí)間同步誤差,定位效果不能滿足場(chǎng)面監(jiān)視需求。Sattarzadeh 等[7]提出了一種多徑衰落信道中精確估計(jì)到達(dá)時(shí)間的低成本方法,利用信道延遲分布的時(shí)域特性,減小多徑和非視距情況下的TOA 測(cè)量誤差。Galati 等[8]提出了以S 模式信號(hào)報(bào)頭為判斷條件,使用匹配濾波器計(jì)算信號(hào)到達(dá)時(shí)間的方法,有效地提高了檢測(cè)的準(zhǔn)確性,但是到達(dá)時(shí)間仍然受限于信噪比,無法滿足多點(diǎn)定位系統(tǒng)的要求。在對(duì)多點(diǎn)定位的研究中,除了接收機(jī)測(cè)量精度之外,另外一個(gè)影響定位精度的重要因素就是求解多點(diǎn)定位方程的算法。程擎等[9]提出了一種改進(jìn)的Taylor-Chan 算法,將Taylor 算法初值帶入Chan 算法進(jìn)行迭代,并驗(yàn)證了算法精度要高于Chan-Taylor 算法。孟天次等[10]提出了改進(jìn)的最小二乘的多點(diǎn)定位算法。這些算法沒有利用智能算法對(duì)TDOA 模型進(jìn)行尋優(yōu),在精度和運(yùn)算速率上無法達(dá)到最優(yōu)。
總的來說,接收機(jī)測(cè)量精度和求解多點(diǎn)定位方程的算法是影響定位精度的兩個(gè)重要因素。本文從提高接收機(jī)的測(cè)量精度出發(fā),提出一種基于馴服時(shí)鐘的分布式授時(shí)方法。針對(duì)多個(gè)遠(yuǎn)端站的高精度時(shí)間同步和信號(hào)檢測(cè)的問題,結(jié)合現(xiàn)場(chǎng)可編程門陣列(field programmable gate array,F(xiàn)PGA)的特點(diǎn)提出了一種具有動(dòng)態(tài)門限值的報(bào)頭檢測(cè)算法來獲取ADS-B 信號(hào)的TDOA 信息,并驗(yàn)證精度后完成多點(diǎn)定位接收機(jī)的設(shè)計(jì)。
1 多點(diǎn)定位原理與定位算法
1.1 TOA 定位
TOA 定位主要是根據(jù)定位目標(biāo)發(fā)送的信息到達(dá)各遠(yuǎn)端站的時(shí)間來定位目標(biāo)位置。定位原理如圖1 所示,每個(gè)遠(yuǎn)端站分布在不同位置,因此目標(biāo)發(fā)送的信號(hào)到達(dá)各遠(yuǎn)端站的時(shí)間存在差異,利用到達(dá)時(shí)間的不同和電磁信號(hào)傳播速度為確定值建立距離方程就能實(shí)現(xiàn)對(duì)目標(biāo)位置的定位。

圖1 TOA 定位原理Fig.1 TOA positioning principle
TOA 定位需要3 個(gè)及以上的定位遠(yuǎn)端站來對(duì)信號(hào)的到達(dá)時(shí)間進(jìn)行測(cè)量。假設(shè)目標(biāo)位置為T(x,y,z),遠(yuǎn)端站BS1位置為(x1,y1,z1),遠(yuǎn)端站BS2位置為(x2,y2,z2),遠(yuǎn)端站BS3位置為(x3,y3,z3),電磁信號(hào)在大氣中的傳播速度為c,目標(biāo)信號(hào)到達(dá)第i個(gè)遠(yuǎn)端站的時(shí)間為ti,則定位方程如下:
解出上述方程即可得到目標(biāo)T的位置 (x,y,z)。從上述分析及數(shù)學(xué)公式可知,影響定位效果的主要因素是時(shí)間的測(cè)量。TOA 定位使用的是同步時(shí)鐘系統(tǒng),如果時(shí)鐘同步精度不夠?qū)е碌竭_(dá)時(shí)間測(cè)量結(jié)果的誤差達(dá)到微秒級(jí)別,那距離誤差會(huì)達(dá)到上百米,從而影響定位的結(jié)果。
到達(dá)時(shí)間TOA 的計(jì)算:使用FPGA 將馴服時(shí)鐘輸出的方波時(shí)鐘信號(hào)倍頻成分布式授時(shí)系統(tǒng)的時(shí)鐘信號(hào),在檢測(cè)報(bào)頭信號(hào)的同時(shí)利用時(shí)鐘信號(hào)進(jìn)行計(jì)數(shù)。如果輸入信號(hào)通過4 脈沖報(bào)頭檢測(cè)算法則表明接收到一組正確的ADS-B 信號(hào)。立即將當(dāng)前計(jì)數(shù)器的值標(biāo)記為當(dāng)前信號(hào)的TOA 信息,并將結(jié)果上傳到上位機(jī),在上位機(jī)中分別計(jì)算每個(gè)接收站到主站之間的時(shí)間差值。
1.2 TDOA 定位
TDOA 定位算法是在TOA 定位算法的基礎(chǔ)上進(jìn)行改進(jìn),它不是直接利用目標(biāo)信號(hào)的到達(dá)時(shí)間,而是利用相同信號(hào)到達(dá)不同遠(yuǎn)端站的時(shí)間差值來定位目標(biāo)位置。相比TOA 算法需要信號(hào)到達(dá)遠(yuǎn)端站的精確時(shí)間,TDOA 算法需要的是相對(duì)時(shí)間的差值,所以在精度上有所提高,是目前應(yīng)用最廣泛的多點(diǎn)定位算法模型。TDOA 算法最少需要3 個(gè)遠(yuǎn)端站機(jī)來確定同一個(gè)目標(biāo)的信號(hào)到達(dá)時(shí)間差,進(jìn)而定位目標(biāo)位置。根據(jù)定位需求的不同,可以分為二維空間雙曲面和三維空間雙曲面定位。TDOA定位的主要原理如圖2 所示。
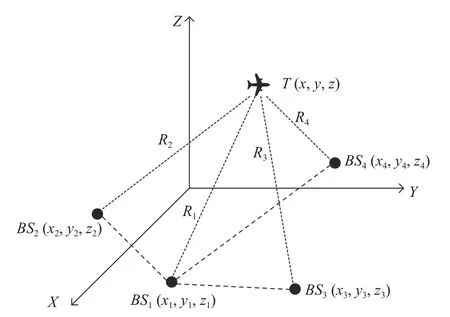
圖2 TDOA 定位原理Fig.2 TOA positioning principle
在三維空間下,多點(diǎn)定位系統(tǒng)的遠(yuǎn)端站由1 個(gè)主站和至少3 個(gè)副站構(gòu)成。假設(shè)各遠(yuǎn)端站的位置坐標(biāo)為(xi,yi,zi),i=1,2,3,4,其中i=1表示主遠(yuǎn)端站,i=2,3,4表示3 個(gè)副遠(yuǎn)端站。目標(biāo)位置為T(x,y,z),Ri,1表示目標(biāo)到達(dá)主站與第i個(gè)副站之間的距離差,ti,1為目標(biāo)信號(hào)到達(dá)主站與第i個(gè)副站之間的時(shí)間差,得到以下方程:
1.3 Taylor 級(jí)數(shù)展開法
本文使用Taylor級(jí)數(shù)展開法求解式(2)方程組。Taylor 算法需要給定一個(gè)初始的預(yù)測(cè)值,將預(yù)測(cè)值代入到公式中進(jìn)行Taylor級(jí)數(shù)展開,忽略大于一階的高階項(xiàng),然后開始迭代計(jì)算。Taylor 算法通過最小二乘法計(jì)算局部最優(yōu)估計(jì)值,在每一次迭代過程中都對(duì)估計(jì)值進(jìn)行更新,直到估計(jì)值和真實(shí)值的誤差在設(shè)定誤差閾值之內(nèi)[11]。
假設(shè)定位目標(biāo)初始位置的坐標(biāo)為P0(x0,y0,z0),目標(biāo)到達(dá)主站與第i個(gè)副站之間的距離差Ri,1可表示為
在預(yù)測(cè)目標(biāo)位置P0處對(duì)式(3)進(jìn)行Taylor 展開,可以得到
可以將上述表達(dá)式寫成矩陣形式:
其中:
則式 ψ=H-Gδ的加權(quán)最小二乘解為
式中,Q為距離測(cè)量值的協(xié)方差矩陣,表示各基站之間時(shí)間測(cè)量的相對(duì)誤差。
將式(7)求解后得到估計(jì)誤差 δ=[?x,?y,?z]T,代入到下次迭代之中,可以得到下一次的估計(jì)值:
在Taylor 算法中,需要設(shè)立一個(gè)誤差閾值ε,重復(fù)以上計(jì)算過程,迭代到滿足閾值門限要求:
從Taylor 算法求解的過程中可以看出,此方法的定位精度與目標(biāo)位置的初始估計(jì)值有關(guān)。當(dāng)初始估計(jì)值與實(shí)際值誤差過大時(shí),Taylor 算法的運(yùn)算時(shí)間過長或者精度會(huì)下降,因此選擇一個(gè)好的初始值對(duì)Taylor 算法十分重要。
2 分布式授時(shí)系統(tǒng)設(shè)計(jì)
2.1 分布式授時(shí)系統(tǒng)結(jié)構(gòu)組成
分布式授時(shí)系統(tǒng)利用ADS-B 信號(hào)進(jìn)行時(shí)鐘同步。ADS-B 信號(hào)經(jīng)過處理后進(jìn)入接收站,接收站此時(shí)會(huì)標(biāo)記信號(hào)的到達(dá)時(shí)間。為了保證時(shí)鐘的同步,分布式授時(shí)系統(tǒng)以GPS 秒脈沖信號(hào)的恒溫晶振作為參考時(shí)鐘,實(shí)現(xiàn)高精度的同步,最終通過FPGA 開發(fā)板進(jìn)行信號(hào)檢測(cè),將時(shí)間信息傳輸至上位機(jī)進(jìn)行定位解算。分布式授時(shí)系統(tǒng)結(jié)構(gòu)如圖3 所示。

圖3 分布式授時(shí)系統(tǒng)的結(jié)構(gòu)組成Fig.3 Structural composition of distributed timing system
2.2 馴服時(shí)鐘實(shí)現(xiàn)
通過結(jié)合本地恒溫晶振與GPS 秒脈沖(pulse per second,PPS)信號(hào),實(shí)現(xiàn)了一種高精度的時(shí)鐘馴服方法。馴服時(shí)鐘系統(tǒng)結(jié)構(gòu)如圖4 所示。
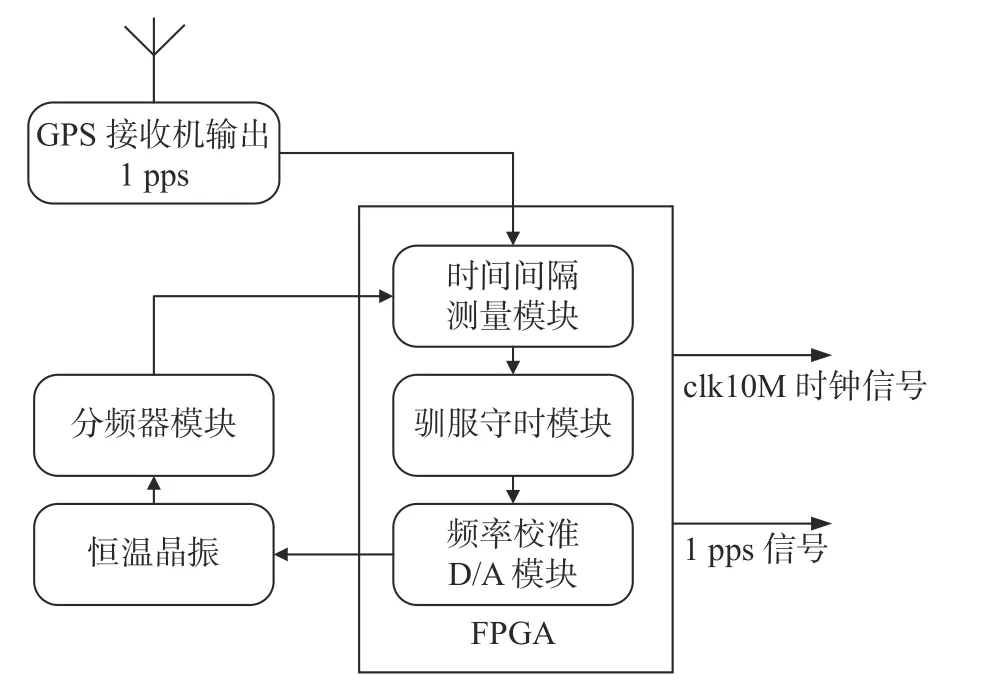
圖4 馴服時(shí)鐘的結(jié)構(gòu)Fig.4 Structural composition of distributed timing system
總體設(shè)計(jì)包括以下幾個(gè)模塊,最終實(shí)現(xiàn)模塊間的環(huán)路控制。
參考時(shí)間源。包括GPS 定位接收機(jī)和恒溫晶振兩個(gè)部分。GPS 接收機(jī)在接收衛(wèi)星信號(hào)之后輸出PPS 信號(hào)作為參考源,但是由于電離層、多徑效應(yīng)甚至衛(wèi)星失鎖時(shí),GPS 的PPS 信號(hào)會(huì)發(fā)生抖動(dòng)出現(xiàn)誤差,所以需要對(duì)其進(jìn)行濾波處理。而恒溫晶振則穩(wěn)定輸出10 MHz 的信號(hào)作為本地時(shí)間源。
分頻器模塊。在接收到恒溫晶振的10 MHz時(shí)間信號(hào)之后,將其分頻處理為1 Hz 的信號(hào)。
時(shí)間間隔測(cè)量模塊。在接收到GPS 接收機(jī)和恒溫晶振輸入的PPS 信號(hào)之后,對(duì)其進(jìn)行間隔測(cè)量,采用高精度的檢測(cè)方式對(duì)PPS 信號(hào)的上升沿或者下降沿進(jìn)行相位檢測(cè),將檢測(cè)結(jié)果輸入到馴服守時(shí)模塊處理。
馴服守時(shí)模塊。分為馴服和守時(shí)兩種模式。在相位差沒有達(dá)到標(biāo)準(zhǔn)時(shí)進(jìn)入馴服模式,對(duì)接收到的相位差結(jié)果進(jìn)行濾波處理消除抖動(dòng),對(duì)濾波的結(jié)果使用PID 控制算法調(diào)整輸出差值。當(dāng)衛(wèi)星失鎖或者相位差結(jié)果過大時(shí)進(jìn)入守時(shí)模式,在系統(tǒng)開始運(yùn)行溫度達(dá)到穩(wěn)定之后,利用IIR 濾波器過濾老化和溫度數(shù)據(jù)進(jìn)行預(yù)測(cè)訓(xùn)練。
D/A 轉(zhuǎn)換模塊。接收馴服守時(shí)模塊的數(shù)據(jù),將數(shù)據(jù)轉(zhuǎn)換成模擬電壓并輸出到恒溫晶振的控制端,從而實(shí)現(xiàn)調(diào)整恒溫晶振的頻率輸出。
3 ADS-B 信號(hào)前導(dǎo)脈沖檢測(cè)
3.1 動(dòng)態(tài)門限值計(jì)算
在目前有關(guān)ADS-B 接收系統(tǒng)的論文中,大部分都采用的固定門限值。固定門限值的缺點(diǎn)是在實(shí)際應(yīng)用中如果信號(hào)功率有變化,可能會(huì)造成部分?jǐn)?shù)據(jù)的丟失,因此本文采用動(dòng)態(tài)門限值。求取動(dòng)態(tài)門限值的過程如下。
1)在系統(tǒng)上電接收到信息之后,設(shè)置一個(gè)200采樣點(diǎn)的寄存器噪聲過渡帶,并求出過渡帶中采樣點(diǎn)的平均值作為最小觸發(fā)門限值MTL,并將最大和最小值分別設(shè)置為上下限值。
2)將噪聲過渡帶設(shè)置為右移寄存器,每次將新采樣點(diǎn)與最小觸發(fā)門限值作比較并計(jì)數(shù)。如果大于門限值則計(jì)數(shù)器加一,直到出現(xiàn)小于門限值的采樣點(diǎn)。
3)將計(jì)數(shù)器值進(jìn)行比較,如果計(jì)數(shù)器值大于22 則表明此時(shí)動(dòng)態(tài)門限值設(shè)置過低,將動(dòng)態(tài)門限值向上調(diào)整為上限值與門限值的中值,并更新上限值。若低于18 則表明動(dòng)態(tài)門限值設(shè)置過高,將動(dòng)態(tài)門限值向下調(diào)整為下限值與門限值的中值。重復(fù)調(diào)整直到計(jì)數(shù)器值在18~22 以內(nèi),輸出此時(shí)的門限值。
動(dòng)態(tài)門限算法流程如圖5 所示。

圖5 動(dòng)態(tài)門限算法流程Fig.5 Dynamic threshold algorithm process
3.2 有效脈沖檢測(cè)與報(bào)頭檢測(cè)
接收到動(dòng)態(tài)門限值之后進(jìn)入脈沖檢測(cè)階段。根據(jù)報(bào)頭檢測(cè)需求,將在S 模式信號(hào)中提取每個(gè)比特位信號(hào)的上升沿位置標(biāo)志和有效脈沖位置標(biāo)志。假設(shè)使用40 MHz 時(shí)鐘進(jìn)行采樣,一個(gè)脈沖持續(xù)時(shí)間超過0.3 μs,相當(dāng)于持續(xù)12 個(gè)時(shí)鐘周期。當(dāng)前采樣點(diǎn)的值大于門限值,并且在此采樣點(diǎn)之后的12 個(gè)點(diǎn)中,每個(gè)點(diǎn)的值也大于門限值時(shí)可以判定脈沖為有效。
根據(jù)ADS-B 信號(hào)格式可知,ADS-B 信號(hào)每一個(gè)信息元包含120 bit 數(shù)據(jù),其中前8 bit 為報(bào)頭。報(bào)頭脈沖都是出現(xiàn)在固定位置上的,每個(gè)脈沖時(shí)寬為0.5±0.05 μs,整個(gè)報(bào)頭持續(xù)時(shí)間為8 μs,以第一個(gè)脈沖出現(xiàn)的位置為參照,第2、3、4 個(gè)脈沖分別出現(xiàn)在1.0、3.5、4.5 μs 處,其他時(shí)間沒有脈沖出現(xiàn)。報(bào)頭檢測(cè)就是檢測(cè)0、1.0、3.5、4.5 μs這4 個(gè)時(shí)序位置上的信號(hào)狀態(tài)。為減少噪聲過大對(duì)報(bào)頭檢測(cè)可能帶來的影響,本設(shè)計(jì)對(duì)以上4 個(gè)時(shí)序位置的上升沿標(biāo)志和有效脈沖標(biāo)志分別做檢測(cè)。在上升沿標(biāo)志和有效脈沖標(biāo)志都符合時(shí)序位置時(shí),才判定這4 個(gè)脈沖是ADS-B 信號(hào)的報(bào)頭。
3.3 信號(hào)到達(dá)時(shí)間計(jì)算
基于FPGA 特性設(shè)計(jì)一個(gè)48 位的計(jì)數(shù)器,當(dāng)FPGA 開發(fā)板上電后自動(dòng)開始計(jì)數(shù),每接收到一個(gè)時(shí)鐘信號(hào)則計(jì)數(shù)器加一。系統(tǒng)檢測(cè)到一個(gè)報(bào)頭信號(hào)就會(huì)發(fā)送標(biāo)志位,當(dāng)出現(xiàn)報(bào)頭標(biāo)志位,則使用寄存器寄存當(dāng)前計(jì)數(shù)值。
4 多點(diǎn)定位接收機(jī)的驗(yàn)證與實(shí)現(xiàn)
4.1 仿真驗(yàn)證
在完成多點(diǎn)定位算法對(duì)目標(biāo)位置的解算后,需要對(duì)結(jié)果的精度進(jìn)行評(píng)估。目前,常用于衡量定位準(zhǔn)確度的指標(biāo)包括定位均方根誤差(root mean square error,RMSE)和幾何精確度衰減因子(geometric dilution of precision,GDOP)。本文主要對(duì)接收機(jī)的時(shí)間同步誤差進(jìn)行改進(jìn),因此選擇使用RMSE作為誤差分析的主要指標(biāo)。
定位解均方根誤差定義為
式中:(x,y)表示定位目標(biāo)實(shí)際位置的二維坐標(biāo);表示經(jīng)過算法定位解算后得出的目標(biāo)位置坐標(biāo)。RMSE 值越小,表示定位的精度越高。如果需要考慮三維定位情況,加上高度坐標(biāo)z即可。
本文仿真采用星型布站設(shè)計(jì),假設(shè)多點(diǎn)定位系統(tǒng)進(jìn)行機(jī)場(chǎng)場(chǎng)面監(jiān)視的區(qū)域?yàn)? 000 m×5 000 m 的方形區(qū)域。由于本文討論的是場(chǎng)面監(jiān)視,所以只考慮二維定位的情況。將TDOA 的測(cè)量距離誤差設(shè)置成服從均值為0 的正態(tài)分布模型,標(biāo)準(zhǔn)差設(shè)置為100 m。以坐標(biāo)(0,0)為主站坐標(biāo),從站坐標(biāo)分別為(5 000,5 000),(-5 000,5 000),(0,-5 000)。在半徑為5 000 m 的圓內(nèi)隨機(jī)選取1 000 個(gè)點(diǎn)作為目標(biāo)位置,分別代入到算法中進(jìn)行定位解算,其中Taylor 算法的初始位置同樣為半徑5 000 m 的圓內(nèi)隨機(jī)取點(diǎn)。仿真結(jié)果如圖6 所示。

圖6 Taylor 級(jí)數(shù)展開法定位均方根誤差Fig.6 Positioning root mean square error of Taylor series expansion method
從圖6 可以看出,當(dāng)TDOA 測(cè)量誤差的標(biāo)準(zhǔn)差在100 m 時(shí),在4 個(gè)基站星型布局的情況下,Taylor算法1 000 次仿真平均均方根誤差在117.893 1 m。使用本文提出的方法后,經(jīng)過Taylor級(jí)數(shù)展開法解算的RMSE 明顯減少。Taylor 級(jí)數(shù)展開法得到的目標(biāo)位置精度較高,證明了本文設(shè)計(jì)的接收機(jī)的可行性。
4.2 接收機(jī)硬件實(shí)現(xiàn)
本文設(shè)計(jì)的接收機(jī)主要完成對(duì)ADS-B 信號(hào)的采集、解碼和到達(dá)時(shí)間的計(jì)算。該設(shè)計(jì)要求對(duì)信號(hào)進(jìn)行實(shí)時(shí)高精度的處理,同時(shí)要求硬件系統(tǒng)具有低功耗和高可靠性。在滿足系統(tǒng)總體設(shè)計(jì)需求的情況下選用合適的FPGA 開發(fā)板,S 模式信號(hào)通過接收前端將信號(hào)解調(diào)還原成模擬信號(hào),進(jìn)入A/D轉(zhuǎn)換模塊,將模擬信號(hào)轉(zhuǎn)換成數(shù)字信號(hào)送入FPGA開發(fā)板進(jìn)行信號(hào)處理。同時(shí),馴服時(shí)鐘輸出時(shí)間信號(hào)到FPGA 開發(fā)板接收機(jī)的系統(tǒng)總體時(shí)間。接收機(jī)的硬件結(jié)構(gòu)如圖7 所示。

圖7 硬件結(jié)構(gòu)Fig.7 Hardware structure
分布式授時(shí)多點(diǎn)定位遠(yuǎn)端站實(shí)物如圖8所示。

圖8 分布式授時(shí)多點(diǎn)定位遠(yuǎn)端站實(shí)物Fig.8 Distributed timing multi-point positioning remote station physical object
4.3 軟件平臺(tái)實(shí)現(xiàn)
本文多點(diǎn)定位軟件系統(tǒng)的數(shù)據(jù)來源是多點(diǎn)定位遠(yuǎn)端站,因此需要先開啟遠(yuǎn)端站接收S 模式信號(hào)。當(dāng)遠(yuǎn)端站接收信號(hào)并解碼校驗(yàn)完成之后,將數(shù)據(jù)通過UART 串口或者UDP 廣播的方式上傳到上位機(jī)。在軟件系統(tǒng)中可以選擇想要接收數(shù)據(jù)的站點(diǎn),選擇之后接收該站點(diǎn)數(shù)據(jù)并解析,獲得航空器的ICAO 地址、經(jīng)緯度、到達(dá)時(shí)間、航向、速度等信息,將這些信息發(fā)送到顯示模塊根據(jù)不同的站點(diǎn)分配到不同的顯示列表進(jìn)行顯示。同時(shí),在不同站點(diǎn)數(shù)據(jù)中找到相同信號(hào)的到達(dá)時(shí)間值做差,將差值發(fā)送到多點(diǎn)定位計(jì)算模塊,帶入到TDOA 模型中,根據(jù)提出的改進(jìn)算法計(jì)算出目標(biāo)的坐標(biāo)位置。在求解出目標(biāo)的坐標(biāo)位置后,還需要將空間坐標(biāo)轉(zhuǎn)換成經(jīng)緯度坐標(biāo),將經(jīng)緯度坐標(biāo)輸入到顯示模塊,在地圖上找到相應(yīng)的位置進(jìn)行顯示。多點(diǎn)定位軟件系統(tǒng)的總體框架如圖9 所示。

圖9 多點(diǎn)定位軟件系統(tǒng)總體框架Fig.9 Overall framework of multi-point positioning software system
多點(diǎn)定位系統(tǒng)軟件主要是完成接收信息、多點(diǎn)定位計(jì)算、數(shù)據(jù)顯示等功能。軟件主界面如圖10 所示。軟件主界面包含顯示主界面、站點(diǎn)選擇、監(jiān)視數(shù)據(jù)源屬性欄等。其中,左上角窗口為選擇站點(diǎn),多點(diǎn)定位需要4 個(gè)及以上的定位遠(yuǎn)端站,此窗口可以根據(jù)需求選擇需要接收數(shù)據(jù)的站點(diǎn)。左下角則是顯示監(jiān)視數(shù)據(jù)的屬性來源,信號(hào)對(duì)應(yīng)的遠(yuǎn)端站和消息類型等。右邊則是顯示主界面,所有信息都在此顯示,可以根據(jù)需求選擇定位目標(biāo)顯示、地面站參數(shù)、解碼數(shù)據(jù)等。

圖10 軟件主界面Fig.10 Software main interface
在接收數(shù)據(jù)的同時(shí),軟件在后臺(tái)會(huì)進(jìn)行解碼操作,從報(bào)文中解析出目標(biāo)航空器的ICAO 地址、國家、航班號(hào)、經(jīng)緯度、高度、航向等信息,并按照格式顯示出來。信號(hào)解碼界面如圖11 所示。
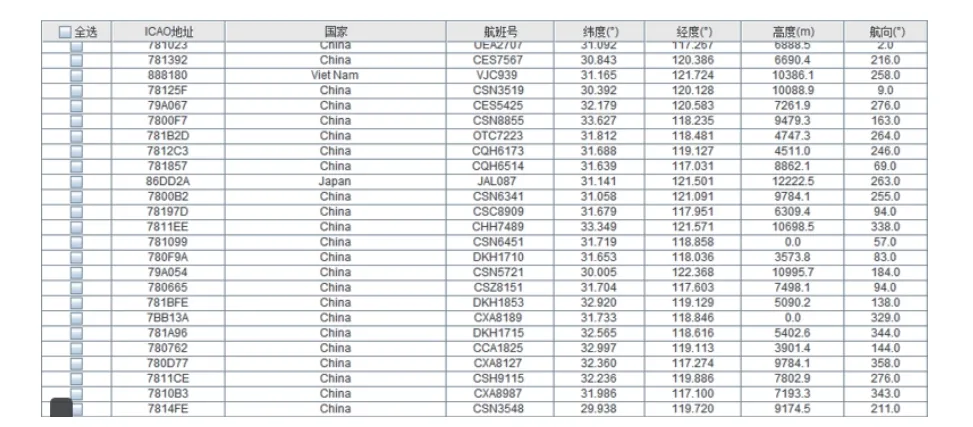
圖11 信號(hào)解碼界面Fig.11 Signal decoding interface
5 結(jié)論
本文提出了一種解決系統(tǒng)時(shí)間同步問題的方法,利用馴服時(shí)鐘作為整個(gè)系統(tǒng)的參考時(shí)鐘,同時(shí)保證了信號(hào)標(biāo)記時(shí)間戳的準(zhǔn)確性和穩(wěn)定性。結(jié)合FPGA 開發(fā)板的特性,設(shè)計(jì)了一種用于提取ADSB 信號(hào)報(bào)頭的算法,從而在高精度同步時(shí)間信號(hào)的基礎(chǔ)上獲取各信號(hào)間的TDOA,最終將結(jié)果發(fā)送至上位機(jī)進(jìn)行定位解算并驗(yàn)證其有效性,仿真數(shù)據(jù)反映了定位的高精度,最后完成了硬件和軟件的實(shí)現(xiàn)。在未來的研究中,可以對(duì)求解多點(diǎn)定位方程的算法進(jìn)行改進(jìn),從而進(jìn)一步提高接收機(jī)的精度。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
