一種智能割草機(jī)器人系統(tǒng)設(shè)計(jì)
2024-02-21 02:10:32管程趙志科李松營(yíng)常浩劉森黃昆
科技風(fēng) 2024年4期
管程 趙志科 李松營(yíng) 常浩 劉森 黃昆
摘?要:該系統(tǒng)以微控制器為核心,采用OpenMV與超聲波傳感器相結(jié)合的方式實(shí)現(xiàn)導(dǎo)航與避障功能,通過(guò)陀螺儀實(shí)時(shí)檢測(cè)地況平整度來(lái)調(diào)整刀具傾角,通過(guò)搭載的UWB模塊與LORA模塊實(shí)現(xiàn)路徑規(guī)劃與遠(yuǎn)程監(jiān)控,并設(shè)計(jì)了整體機(jī)械結(jié)構(gòu)及伸縮式刀具結(jié)構(gòu),為智能割草機(jī)器人提供了完整設(shè)計(jì)方案。
關(guān)鍵詞:割草機(jī)器人;路徑規(guī)劃;遠(yuǎn)程監(jiān)控
中圖分類號(hào):TP242
草坪在城市和景區(qū)綠化方面發(fā)揮著重要作用,然而隨著草坪面積的不斷增大,草坪的日常修剪成為一項(xiàng)繁重的工作。為了減輕草坪修剪維護(hù)的成本,割草機(jī)器人應(yīng)運(yùn)而生[12]。現(xiàn)有的割草機(jī)器人主要有輪式驅(qū)動(dòng)和履帶驅(qū)動(dòng)兩種方式。履帶式割草機(jī)人具有爬坡能力強(qiáng),適應(yīng)不同地況的優(yōu)點(diǎn),但自身重量偏重,對(duì)動(dòng)力電池的要求較高。輪式割草機(jī)器人具有驅(qū)動(dòng)結(jié)構(gòu)簡(jiǎn)單的優(yōu)點(diǎn),在現(xiàn)有的割草機(jī)器人中應(yīng)用最為廣泛。割草路徑規(guī)劃是割草機(jī)器人智能化的重要特征。現(xiàn)有的割草機(jī)器人主要借助超聲波傳感器、激光雷達(dá)、機(jī)器視覺(jué)、北斗導(dǎo)航等信息獲取方式,并通過(guò)Dijkstra算法、A*算法、D*算法、人工勢(shì)場(chǎng)法等路徑規(guī)劃算法實(shí)現(xiàn)最佳路徑選擇[34]。近年來(lái),隨著人工智能和圖像處理硬件性能的大幅提升,使得實(shí)時(shí)圖像處理與控制決策成為可能,也使得YOLO等目標(biāo)檢測(cè)算法越來(lái)越多地應(yīng)用于割草機(jī)器人的路徑規(guī)劃之中。但是,這些割草機(jī)器人普遍存在智能化程度低,且僅能勝任平整草坪的修建工作,無(wú)法適應(yīng)全天候、多種地況作業(yè)的修剪任務(wù)[5]。特別是因缺乏智能路徑選擇算法,容易出現(xiàn)重復(fù)作業(yè)和遺漏未修剪的情況出現(xiàn)。因此,迫切需要設(shè)計(jì)一種適應(yīng)多種地況的新型智能割草機(jī)器人。
1?系統(tǒng)總體設(shè)計(jì)
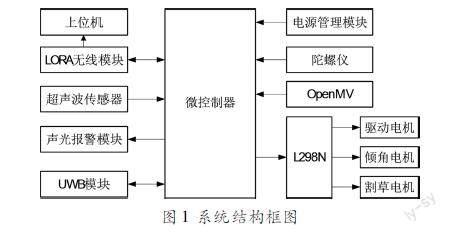
本設(shè)計(jì)的智能割草機(jī)器人系統(tǒng)方案,如圖1所示。本設(shè)計(jì)的微控制選擇STM32F407作為整個(gè)控制系統(tǒng)的核心,用于處理各個(gè)傳感器獲得的數(shù)據(jù)信息,并做出控制決策。陀螺儀選用MPU6050,用于實(shí)時(shí)獲取行進(jìn)中機(jī)器人的位置姿態(tài),根據(jù)運(yùn)行姿態(tài)來(lái)調(diào)整割草刀具的傾斜角度。選用L298N來(lái)驅(qū)動(dòng)割草機(jī)器人的行進(jìn)電機(jī)、刀具傾角電機(jī)、割草電機(jī)。通過(guò)OpenMV?H7實(shí)現(xiàn)視覺(jué)導(dǎo)航,并通過(guò)其內(nèi)部算法實(shí)現(xiàn)對(duì)草地與其他地況的區(qū)分。割草機(jī)器人在其四周安置了超聲波傳感器,用于輔助OpenMV開(kāi)展障礙物識(shí)別,當(dāng)檢測(cè)到了障礙物時(shí),通過(guò)聲波報(bào)警模塊發(fā)出報(bào)警提示。通過(guò)搭載的UWB模塊,借助標(biāo)簽實(shí)現(xiàn)對(duì)行進(jìn)路徑進(jìn)行監(jiān)測(cè)與規(guī)劃,通過(guò)LORA模塊實(shí)時(shí)地將采集到的數(shù)據(jù)進(jìn)行上傳,便于開(kāi)展遠(yuǎn)程監(jiān)控。系統(tǒng)具有電源管理模塊用于實(shí)時(shí)監(jiān)測(cè)電池剩余容量。
2?硬件設(shè)計(jì)
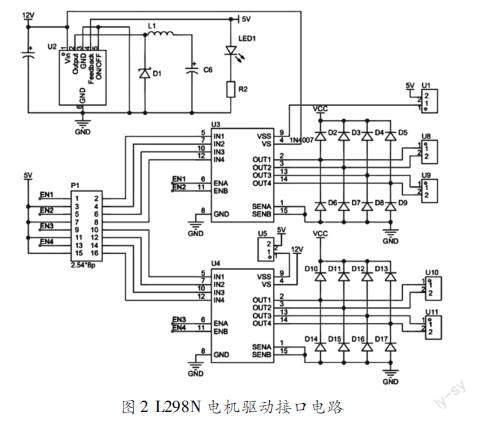
2.1?L298電機(jī)驅(qū)動(dòng)電路
L298N是專用驅(qū)動(dòng)集成電路芯片,屬于H橋集成電路。本系統(tǒng)采用L298N驅(qū)動(dòng)所涉及的控制電機(jī),如圖2所示。U3和U4為L(zhǎng)298N芯片,U2為DCDC降壓芯片LM2596S。
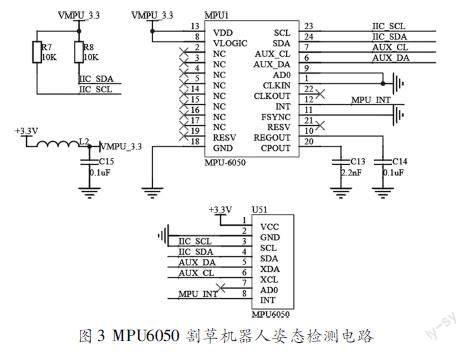
2.2?MPU6050割草姿態(tài)檢測(cè)電路
基于MPU6050的割草機(jī)器人姿態(tài)檢測(cè)電路,如圖3所示。MPU6050其內(nèi)部整合了3軸陀螺儀和3軸加速度傳感器,通過(guò)主IIC接口,向本系統(tǒng)的主控制器STM32F407單片機(jī)實(shí)時(shí)輸出姿態(tài)數(shù)據(jù)。
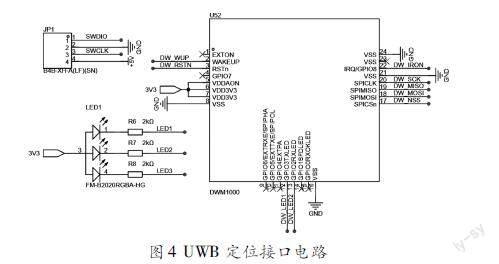
2.3?UWB定位接口電路
UWB定位接口電路,如圖4所示。U52為DWM1000模塊,其將天線、所有射頻電路、電源管理和時(shí)鐘電路集成在一個(gè)模塊中,可用于雙向測(cè)距或時(shí)差定位系統(tǒng),定位精度可達(dá)10厘米,并支持高達(dá)6.8Mbps的數(shù)據(jù)速率。
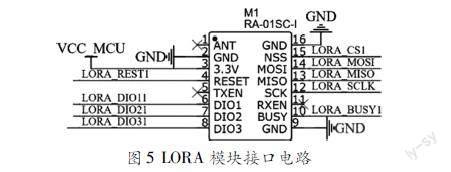
2.4?LORA模塊接口電路
LORA模塊接口電路,如圖5所示。M1為RA01SCI,該模塊用于超長(zhǎng)距離擴(kuò)頻通信,其射頻芯片LLCC68主要采用LoRaTM遠(yuǎn)程調(diào)制解調(diào)器,用于超長(zhǎng)距離擴(kuò)頻通信,抗干擾性強(qiáng),功耗低。
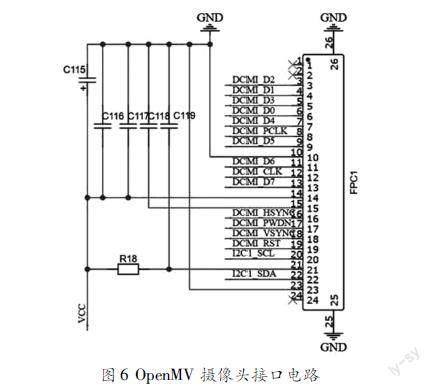
2.5?UWB定位接口電路
OpenMV攝像頭接口電路,如圖6所示。OpenMV是一款具有圖像處理功能的可編程的單片機(jī)攝像頭,利用其完成對(duì)草坪的識(shí)別,并將信息實(shí)時(shí)傳送給微控制器。
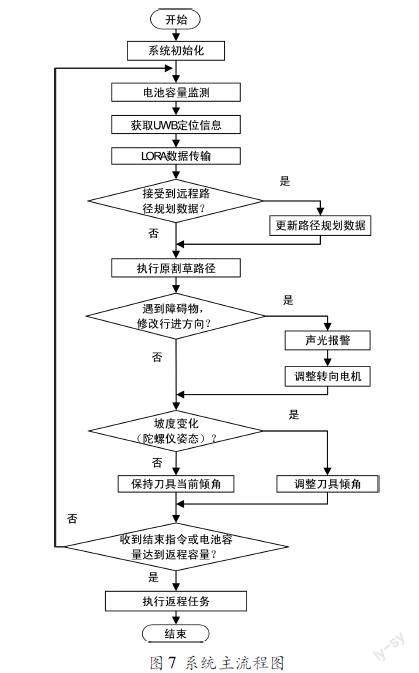
3?軟件程序設(shè)計(jì)
系統(tǒng)主流程圖,如圖7所示。系統(tǒng)上電后,首先完成系統(tǒng)的初始化,開(kāi)啟電池剩余容量監(jiān)測(cè),獲取UWB定位信息,開(kāi)啟LORA數(shù)據(jù)遠(yuǎn)程傳輸。開(kāi)啟詢問(wèn)是否接受遠(yuǎn)程路徑規(guī)劃數(shù)據(jù),如果監(jiān)控平臺(tái)的上位機(jī)下發(fā)路徑規(guī)劃數(shù)據(jù),則系統(tǒng)將接受到的路徑規(guī)劃數(shù)據(jù)替換原來(lái)系統(tǒng)默認(rèn)的規(guī)劃數(shù)據(jù)。如果沒(méi)有接收到遠(yuǎn)程路徑規(guī)劃數(shù)據(jù)指令,則運(yùn)行原割草路徑。當(dāng)OpenMV和超聲波傳感器檢測(cè)到障礙物后,進(jìn)行聲光報(bào)警并調(diào)整轉(zhuǎn)向繞開(kāi)障礙物行進(jìn)。陀螺儀實(shí)時(shí)檢測(cè)割草機(jī)器人運(yùn)行坡度的變化,當(dāng)割草機(jī)器人坡度變化時(shí),動(dòng)態(tài)調(diào)整割草刀具傾角,以保證割草的平整性。當(dāng)割草機(jī)器人檢測(cè)坡度無(wú)變化時(shí),保持當(dāng)前刀具的割草傾角不變。當(dāng)系統(tǒng)接收到遠(yuǎn)程返回指令或檢測(cè)到電池剩余容量不足時(shí),會(huì)執(zhí)行返回任務(wù)。否則,繼續(xù)輪詢執(zhí)行。
4?機(jī)械結(jié)構(gòu)設(shè)計(jì)
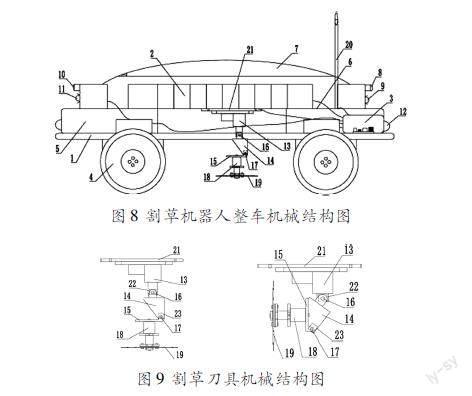
智能割草機(jī)器人整車機(jī)械結(jié)構(gòu),如圖8所示。割草刀具機(jī)械結(jié)構(gòu),如圖9所示。割草機(jī)器人包括車架1、電池組2、割草機(jī)構(gòu)和控制系統(tǒng)單元3,車架1的左側(cè)部和右側(cè)部均設(shè)置有兩個(gè)前后間隔的車輪4,四個(gè)車輪的中心均內(nèi)置有驅(qū)動(dòng)其轉(zhuǎn)動(dòng)的直流電機(jī),車架1的上部設(shè)置有車體5,車體5的頂部和底部均為敞口的箱體結(jié)構(gòu),車體5內(nèi)中部設(shè)置有水平承載板6,電池組2固定在水平承載板6的上表面且位于車體5內(nèi)上側(cè)部,車體5的頂部通過(guò)螺栓固定連接有車蓋7,割草機(jī)構(gòu)通過(guò)升降翻轉(zhuǎn)調(diào)節(jié)機(jī)構(gòu)固定在水平承載板6的下表面,車體5的前側(cè)中部上下間隔設(shè)置有前視攝像頭8和前視燈9,車體5的后側(cè)中部上下間隔設(shè)置有后視攝像頭10和后視燈11,車體5的前下部和后下部的左右兩側(cè)均設(shè)置有一個(gè)超聲波探頭12,車架1上設(shè)置有陀螺儀傳感器。升降翻轉(zhuǎn)調(diào)節(jié)機(jī)構(gòu)包括連接板21、電動(dòng)推桿13、第一舵機(jī)22、U型板14、第二舵機(jī)23和水平電機(jī)座15,連接板21水平設(shè)置在水平承載板6的下表面,電動(dòng)推桿13豎向設(shè)置,電動(dòng)推桿13的伸縮桿向下伸出缸體的底部,電動(dòng)推桿13的缸體頂部固定在連接板21的下表面,第一舵機(jī)22固定設(shè)置在電動(dòng)推桿13的伸縮桿下端部,第一舵機(jī)22的動(dòng)力軸沿左右方向水平設(shè)置,U型板14的下側(cè)、前側(cè)和后側(cè)均敞口,U型板14的后側(cè)邊為左高右低的斜邊,U型板14的頂板上部通過(guò)一根沿左右方向水平設(shè)置的第一銷軸16轉(zhuǎn)動(dòng)連接在電動(dòng)推桿13的伸縮桿下端部,第一舵機(jī)22的動(dòng)力軸同軸傳動(dòng)連接第一銷軸16,第二舵機(jī)23固定設(shè)置在U型板14下側(cè)部,第二舵機(jī)23的動(dòng)力軸沿左右方向水平設(shè)置,水平電機(jī)座15的前側(cè)上部通過(guò)一根沿左右方向水平設(shè)置的第二銷軸17轉(zhuǎn)動(dòng)連接在U型板14下側(cè)部,第二舵機(jī)23的動(dòng)力軸同軸傳動(dòng)連接第二銷軸17,電池組2分別與電動(dòng)推桿13、第一舵機(jī)22和第二舵機(jī)23電連接。割草機(jī)構(gòu)包括割草電機(jī)18和割草刀片19,割草電機(jī)18豎向設(shè)置并固定連接在水平電機(jī)座15的下表面中部,割草電機(jī)18的動(dòng)力軸位于割草電機(jī)18的下部,割草刀片19呈長(zhǎng)方形且水平設(shè)置,割草刀片19的中部固定連接在割草電機(jī)18的動(dòng)力軸下端。車體5上設(shè)置有天線20和蜂鳴器,控制系統(tǒng)單元3分別與天線20和蜂鳴器信號(hào)連接,控制系統(tǒng)單元3的外部設(shè)置有全密封罩。
結(jié)語(yǔ)
本文提供了一種智能割草機(jī)器人的設(shè)計(jì)方案,利用多傳感數(shù)據(jù)融合技術(shù),將超聲波傳感器與機(jī)器視覺(jué)檢測(cè)相結(jié)合實(shí)現(xiàn)目標(biāo)檢測(cè),通過(guò)陀螺儀獲取運(yùn)行姿態(tài)動(dòng)態(tài)調(diào)整刀具傾角,確保草坪修整高低一致,利用UWV技術(shù)實(shí)現(xiàn)定位與路徑規(guī)劃,通過(guò)LORA實(shí)現(xiàn)數(shù)據(jù)實(shí)時(shí)上傳或接受遠(yuǎn)程路徑規(guī)劃數(shù)據(jù)及控制指令,能夠?qū)崿F(xiàn)電池容量監(jiān)測(cè)與自動(dòng)返回功能。
參考文獻(xiàn):
[1]孫曉紅.割草機(jī)器人控制系統(tǒng)及路徑規(guī)劃設(shè)計(jì)[J].機(jī)械管理開(kāi)發(fā),2023,38(03):163164+167.
[2]徐晨.基于計(jì)算機(jī)視覺(jué)的割草機(jī)器人作業(yè)控制研究[J].農(nóng)機(jī)化研究,2022,44(12):235238.
[3]王新彥,易政洋.基于改進(jìn)YOLOv5的割草機(jī)器人工作環(huán)境障礙物檢測(cè)方法研究[J].中國(guó)農(nóng)機(jī)化學(xué)報(bào),2023,44(03):171176.
[4]王新彥,盛冠杰,張凱,等.基于改進(jìn)A*算法和DFS算法的割草機(jī)器人遍歷路徑規(guī)劃[J].中國(guó)農(nóng)機(jī)化學(xué)報(bào),2023,44(02):142147.
[5]陳鏡宇,郭志軍,金鑫,等.基于激光掃描雷達(dá)的智能割草機(jī)器人障礙物檢測(cè)[J].現(xiàn)代電子技術(shù),2022,45(18):177181.
基金項(xiàng)目:河南省高等學(xué)校大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃項(xiàng)目(S202110463010);教育部產(chǎn)學(xué)合作協(xié)同育人項(xiàng)目(220803203302008);河南工業(yè)大學(xué)高層次人才科研啟動(dòng)基金項(xiàng)目(2020BS011)
作者簡(jiǎn)介:管程(2001—?),男,漢族,河南開(kāi)封人,本科,研究方向:機(jī)器人設(shè)計(jì)。
*通訊作者:趙志科(1987—?),男,漢族,河南濟(jì)源人,博士研究生,講師,研究方向:檢測(cè)技術(shù)與自動(dòng)化裝置。