結合機器人應用的現代控制理論課程教學改革研究
2024-03-04 06:50:48劉爽
高教學刊 2024年6期

基金項目:國家自然科學基金面上項目“薄壁復雜曲面表面超聲滾壓強化及雙側協調控制研究”(51975214)
作者簡介:劉爽(1982-),男,漢族,吉林長春人,博士,副教授。研究方向為抗疲勞制造與機器人技術。
DOI:10.19980/j.CN23-1593/G4.2024.06.032
摘? 要:現代控制理論課程對于機電控制方向特別是機器人研究方向的研究生而言,是必須學習的一門課程。然而,對于大部分機械專業的研究生來說,該課程理論難度較高,并且課程聯系實際應用較差。該文根據作者多年教學經驗,概括高校中的現代控制理論課程特點,結合自身機器人研究方向基礎,從教材、教學內容、實驗配套、教學模式、考核方式等方面明確現有課程的不足,并提出相應的具體改革對策,為非自動化專業的現代控制理論課程建設提供參考和應用實踐。
關鍵詞:現代控制理論;機器人技術;教學改革;教學內容;教學模式
中圖分類號:G642? ? ? ? 文獻標志碼:A? ? ? ? ? 文章編號:2096-000X(2024)06-0136-04
Abstract: The course of Modern Control Theory is a required course for graduate students in electromechanical control, especially in robot research. However, for most graduate students majoring in machinery, this course is difficult in theory and poor in practical application. Based on the author's years of teaching experience, this paper summarizes the characteristics of the modern control theory course in colleges and universities, and clarifies the shortcomings of the existing courses from the aspects of teaching materials, teaching content, experimental support, teaching mode, assessment methods, etc., and puts forward corresponding specific reform countermeasures with considering the robotic applications. This work aims to provide reference and application practice for the construction of Modern Control Theory courses in non-automation majors.
Keywords: Modern Control Theory; robotics; teaching reform; teaching content; teaching mode
現代控制理論課程是高等院校機械專業研究生的核心學位課程,也是機電類研究方向的基礎[1-2]。由于機械學院中大多數研究方向對控制理論的要求不高,因此,研究生培養方案中一般只將現代控制理論課程列為選修課。該課程本身理論性較強,存在大量的數學公式推導,實踐應用部分普遍使用倒立擺的平衡控制這一實例,對學生而言過于枯燥[3]。因此,選課積極性普遍不高,教學效果與成績也較難控制。但該課程的重要性不言而喻,特別是很多機電專業的研究生在從事機器人技術這類綜合性研究方向時,如果沒有選修該課程,將會非常吃力[4]。
作者有著多年的現代控制理論課程教學經驗,也教授了多年本科的控制工程基礎與微機原理及應用課程,對機械專業中該課程的教學特點與教學對象非常熟悉。作者結合自身關于機器人研究的方向,思考如何融合機器人應用案例,提高該課程的工程實踐性,增強學生學習積極性,對現代控制理論課程的內容、教學方法和考核方式等方面進行改革研究。
一? 現代控制理論課程的現狀與特點
(一)? 機械專業中的現代控制理論課程
機械專業培養方案中的現代控制理論課程一般與自動化專業中的不同,比如作者所在高校中機械專業的現代控制理論課程是一門32學分的選修課,而自動化專業中則為64學時必修課,這在許多高校也是普遍現象。該課程雖然是選修課程,但屬于碩士學位的核心課,該類別課程必須修滿6個學分,并且作為核心課必須要求考試。由于該課程理論性較強,考試難度大,因此,選修該課程的研究生一類是學生的研究方向與控制相關,比如機器人技術、機電控制、設備監測等方向,另一類是由于其他核心課程無法滿足學分要求,或為了滿足升學考博要求[5-6]。因此,針對機械專業的現代控制理論課程選修,應盡量簡化繁瑣的理論推導,重視結論的應用與實踐,提高學生自主學習積極性和擴展課程內容。
(二)? 課程的內容特點
現代控制理論課程的內容主要分為狀態空間模型、系統分析、系統綜合和最優控制幾個部分[7]。但是由于學時限制,機械專業中教學大綱通常會將最優化控制部分進行縮減,并省略部分離散系統的內容,同時簡化或省略一些較復雜的定理推導。在整個教學過程中,課程除了緒論部分提供了較多應用案例外,其他章節大多遵循“理論-推導-結論-MATLAB仿真”的教學模式。為了豐富教學與聯系實際應用,多數課程都在MATLAB仿真中穿插了倒立擺的案例[8],也有一些高校配套了課程實驗,大部分自動化專業的現代控制理論課程內容較多,需要更多的課時,而機械專業的課程則應該適當減少內容來平衡課時限制的影響。
總體上,該課程有著理論性強、公式抽象難懂、涉及面廣等特點,對學生而言是較難學習的一門課程。此外,該課程對控制基礎與線性代數基礎的依賴性非常高[9],傳遞函數模型與狀態空間模型之間的轉換關系如圖1所示。在該知識點的講授中,直接對傳遞函數進行了矩陣操作,這就默認學生在本科階段對自動控制原理和線性代數掌握較好。但事實上,根據作者多年的教學經驗體會,學生們的基礎參差不齊,特別是涉及諸如約當矩陣這類概念時,大部分學生更是沒有掌握的,這和本科階段的線性代數教學大綱有關。這就意味著在教學中需要穿插補充一些基礎知識復習,以便學生對基本定理公式的理解,這對教師教學進度與學時的把控能力提出了挑戰。
圖1? 現代控制理論課程中傳遞函數模型與狀態空間模型
轉換關系
(三)? 課程對象的特點
在自動化專業的研究生培養方案中有很多與現代控制理論相關的課程,比如,最優控制理論和自適應控制課程等,形成了一個控制理論的學習體系,然而,對機械專業的研究生而言,現代控制理論課程是非常獨立的一門課程,很難形成關聯效應,學習起來會非常困難。此外,現代控制理論課程是學生本科階段控制工程基礎或自動控制原理課程的一個后續課程,而機械專業的本科生有相當比例在后續的培養方案中并沒有涉及任何控制相關的研究問題,這就造成在課程學習時,機械專業學生的基礎明顯較弱的現象。
就作者所在機械學院的現代控制理論課程選課學生來看,主要是機械工程和動力工程專業學生選修,其中約有一半研究生的本科就來自本校的機設或過程專業,都學習過控制工程基礎(必修),大部分掌握程度滿足本課程學習要求。另一半研究生的本科來自其他高校,其中部分學生本科階段沒有必修自動控制原理課程或基礎較差。而對于線性代數基礎,學生們普遍忘卻較多。因此,研究生培養方案中,在第1、2學期都設計了矩陣理論的課程,以輔助其他課程的教學,這在一定程度上彌補了這一缺陷。
根據作者對學院中各個團隊的研究方向了解,對現代控制理論需求較高的方向主要集中在機電自動化領域上,特別是與機器人技術與應用相關的方向。因此,該團隊的研究生學習熱情較高,而從事機械制造、檢測監測或流體控制的研究生也會學習該課程,但機械材料與壽命預測的學生選課的目的大多數是為了滿足學分要求。這些學生的差異在進行MATLAB仿真教學以及小組實驗討論時會特別明顯,需要區別對待。
二? 教學內容的改革
(一)? 進行教材改進
現有的現代控制理論課程教材通常是自動化專業教師編寫的,并用于自動化專業的必修課程教學,通常教材內容較詳細,重視理論邏輯與公式推導[10],一些教材輔助以MATLAB案例與程序,所以篇幅普遍較長。市面上較少有針對非自動化專業研究生或偏應用型的教材,考慮到機械專業研究生選修該課程的主要原因是工程應用且課時較短,因此,應該編寫針對性強的偏應用型教材。由于現代控制理論的學習需要較好的工程數學基礎知識,因此,補充相應的矩陣理論知識有助于學生對課程內容的理解。此外,應該適當降低教材難度,減少篇幅,簡略其中的公式推導過程。為增強課程的實際應用性和學生的能力培養,可以選擇更有代表性的應用案例,替代原有的倒立擺案例,并輔助以實驗配套。
(二)? 優化教學內容
在教學內容上,由于控制工程基礎為現代控制理論的前序課程,也是機械專業本科的必修課,因此,采用對比教學,可增強學生對控制理論的理解,并了解現代控制理論的優勢和學習必要性。
為了增強現代控制理論課程的實際工程應用性,應選擇更有代表性的工程案例,穿插在整個教學過程中。本文作者根據自身機器人研究基礎與多年教學經驗,不斷嘗試將兩輪差動移動機器人的控制作為典型案例,代替現有的平衡倒立擺案例。移動機器人的控制在現代社會中有廣泛應用,比如酒店、餐廳、銀行、醫院的服務機器人基本都是兩輪差動機器人,而自動駕駛和核心控制也與移動機器人控制方法類似,這將大大增加案例的實際應用性,提高學生興趣。
具體地,可以在各個章節中以移動機器人的控制為例,從狀態空間模型建模、系統分析、系統綜合和最優控制幾個方面來優化教學內容。比如,①在狀態空間建模中,以兩輪差動移動機器人運動模型為例,推導其狀態空間模型,其特點是將兩輪輪速控制推導為機器人中心點的平面移動與轉動控制,建立移動機器人控制的狀態空間表達式;②同時,可對比全向移動機器人與差動移動機器人在狀態空間模型中的區別,具體分析輪速的兩個控制量在控制平面三個自由度時的能控性;③可以通過兩個輪子轉速進行機器人狀態估計,以兩輪的編碼器得到的速度作為典型觀測器來分析機器人的能觀性;④在系統綜合中,可以講解經典的差動機器人軌跡跟蹤控制方法,如back stepping方法,對跟蹤控制器的穩定性進行分析,調節其中狀態變量并分析其對穩定性的影響;⑤在控制器設計中,則可利用李雅普諾夫穩定性分析方法設計一個非線性控制器,保證軌跡跟蹤誤差收斂,加深學生對機器人控制器設計過程的理解。以差動移動機器人的控制為案例穿插到教學內容中,這樣的教學改動不僅可以大幅增加課程聯系實際應用性,還與目前主流的機電領域發展相一致,為相關研究生的課題研究提供基礎,增加學生學習積極性。
(三)? 輔助實驗內容
傳統教材大多以MATLAB仿真進行案例輔助教學。MATLAB具有現代控制理論的基本公式計算功能,而且相關函數可以直接進行狀態空間模型建立、能控和能觀性分析,以及穩定性的計算與判斷,可以簡化實際應用時繁瑣的公式計算與推導。這在一定程度上降低了課程學習的枯燥與單調性,增加了理論公式的可實用性,但所使用的案例大多數是倒立擺[11],雖然對象簡單案例成熟,但很難讓學生聯系實際應用。
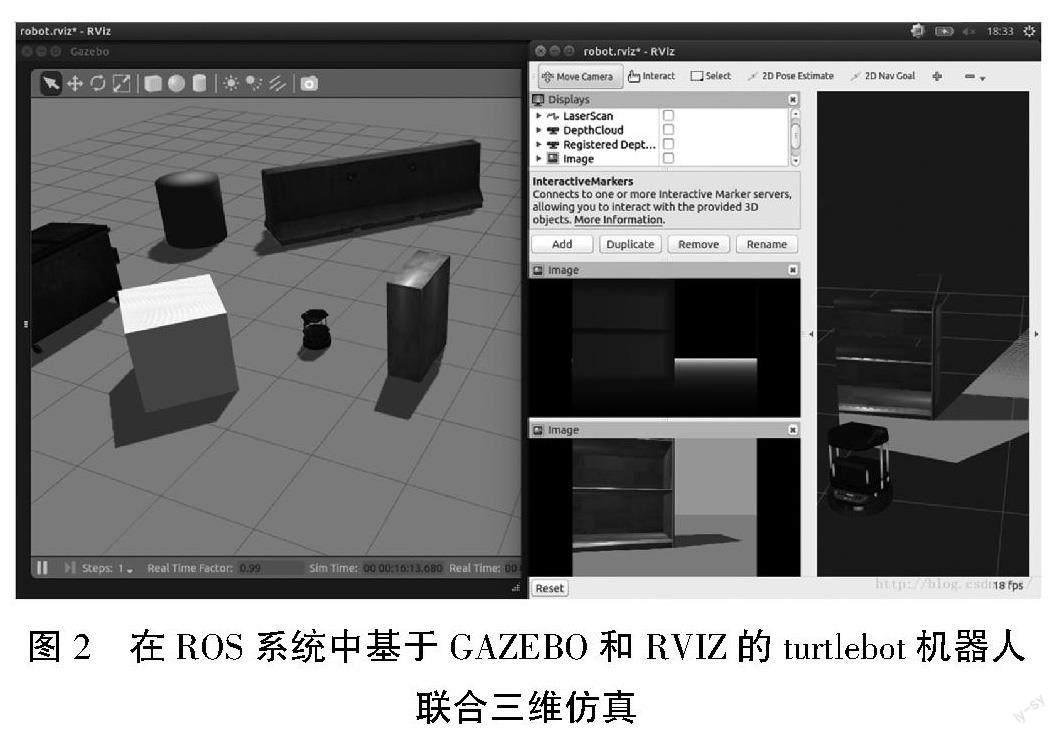
結合作者對機械專業研究方向與學生興趣的了解,學生普遍對機器人和人工智能等新興概念感興趣,特別是越來越多的各式各樣的服務機器人出現在日常生活當中,比如餐廳送餐機器人、酒店的服務機器人、銀行的業務輔助機器人以及在防疫工作中出現的消毒與藥品配送機器人等。因此,采用移動機器人為案例對象,可以增加案例的實用性和學生興趣。為此,可以配合教材的改進,增加課程的實驗內容,補充目前機器人研發主流的機器人操作系統ROS的基礎知識擴展。利用ROS系統的三維物理仿真平臺GAZEBO和三維可視化工具RVIZ構建移動機器人聯合仿真環境,也可以搭配turtlebot機器人實物實驗演示,如圖2所示。
ROS系統目前已經成為機器人領域主流的研發工具,不僅是各高校機器人研究方向的必修知識,也是機器人行業領域的基礎工具。因此,學習相關知識可以為機器人研究方向的學生打下良好基礎,而移動機器人控制也是現代控制理論的一個重要應用,對學生的吸引力是非常大的。在實驗內容上,可以配合教學內容的改進,將差動移動機器人的狀態模型編寫進仿真器中,并對所設計的軌跡跟蹤控制器進行程序編寫與示范,具體掌握如何利用控制理論知識進行控制器設計的過程;ROS中有豐富的開源程序代碼,可選擇適合的機器人控制器,進行參數的調整與優化,分析機器人的控制器性能,理解狀態空間中參數對應的實際物理意義。
圖2? 在ROS系統中基于GAZEBO和RVIZ的turtlebot機器人
聯合三維仿真
三? 教學方法的改革
(一)? 厚植愛國主義情懷
在全國高校思想政治工作會議中,習近平總書記多次強調教育應該將“立德樹人作為中心環節,把思想政治工作貫穿教育教學全過程”。我們正身處中華民族偉大復興戰略全局和世界百年未有之大變局,每一個熱血的中華兒女都應當繼承和推進革命先輩的現代化國家理想,篤心定力,將愛國主義精神厚植心髓,為實現中華民族的偉大復興而不懈奮斗。在現代控制理論課程教學中,應該將專業知識與思政建設有機融合[12]。
比如,作者在介紹現代控制典型應用時,會舉例我國在無人系統集群控制中的發展歷史,讓學生們直觀感受現實中的軍事科技對抗。在短短兩年內,中美四次刷新無人機集群飛行的規模,在該領域的競爭日趨激烈,而最新的報道則以我國成功完成119架無人機集群飛行試驗暫時領先。讓同學們明白他們肩負著國家科技強國的重任,理解課程知識的重要性,大大提升學生的民族自豪感和責任感。
(二)? 現代化信息教學
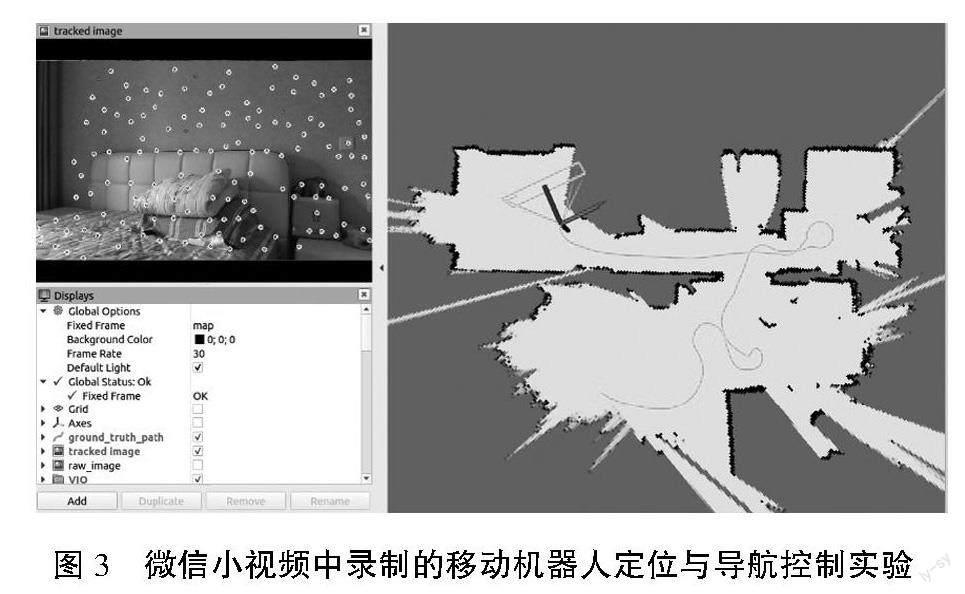
在多媒體、網絡、智能化發達的今天,每一個學生都可以方便地利用手機、電腦來獲取信息,對不熟悉的事物進行搜索和查找。因此,充分利用視頻教程、網絡博客資源,可以大大提高學生學習興趣,并將一些基礎知識做課外擴展。比如,作者嘗試利用短視頻平臺,拍攝機器人控制程序的編寫教程、機器人仿真與實驗,可以有效地將教師的科研課題內容和研究進展植入教學,并且非常容易更新,保持教學內容的新穎性,如圖3所示,作者在微信小視頻中錄制的移動機器人定位與導航視頻,可配合講解控制器的設計與性能。
圖3? 微信小視頻中錄制的移動機器人定位與導航控制實驗
學生們普遍會使用知乎和其他微博、博客學習計算機知識,因此,也可以利用微博、博客等平臺介紹機器人系統ROS的教程與使用,并且機器人相關的網絡資源豐富,非常容易收集。這樣不僅讓教學形式更加豐富,便于學習和查找,還可大大擴展課程的教學內容,節省課堂教學時間。此外,通過網絡平臺中的互動,也可以進一步彌補傳統課堂教學中互動不足的缺點,把共性的難點和問題解答進行共享和展示。
(三)? 多樣化的考核
在成績考核方面,由于現代控制理論課程的理論性強,設計的題目計算復雜,二期步驟較多,所以學生考試分數普遍不高,而且課程知識的運用也很難在考試題目中體現[13]。因此,結合教學實驗設計的改進,作者近年來嘗試采用小組討論與實驗的方式,將所學知識進行案例應用,并展示項目成果,作為應用實踐部分的成績考核。在案例應用中,教師設計題目或學生自選與自身課題相關的內容,對控制對象進行建模分析,并做系統綜合和控制器設計。小組討論與試驗的成績可以根據題目的難度和完成情況進行打分。根據作者的多年教學實踐與總結,可以采用如下的考核方法:①平時成績共15分:其中考勤與課堂表現占5分,作業占10分;②實踐應用共35分:其中案例應用報告占25分,PPT匯報情況占10分;③期末考試成績50分。這樣的多樣化考核方式更能反映學生理論學習和實踐應用的水平,成績更為客觀。
四? 結束語
本文對面向機械專業的現代控制理論研究生課程的教學改革進行了探索。作者結合多年課程教學經驗,提倡重視工程應用的思想理念,將機器人作為典型案例融入現代控制理論教學內容中。在改進教材與教學內容的基礎上,增加機器人實驗教學環節,利用現代信息教學、小組討論與實驗等手段豐富教學內容,達到了拓寬學生視野,調動了學生自主學習積極性,培養了學生實際工程應用能力的目的。
參考文獻:
[1] 趙斌,郭建國,盧青,等.現代控制理論課程的教學創新探索與實踐[J].中國現代教育裝備,2022(17):101-105.
[2] 黃蘇丹,曹廣忠,邱洪,等.現代控制理論榮譽課程教學設計[J].高教學刊,2022,8(26):102-104,108.
[3] 李健,蘇慶宇.研究性教學在現代控制理論課程中的應用與持續改進[J].中國現代教育裝備,2022(13):119-120,133.
[4] 張苗,肖士敏.現代控制理論實驗課程案例教學探索[J].中國現代教育裝備,2022(7):117-119.
[5] 于浩洋,劉海成,杜娟,等.新工科視域下《現代控制理論》課程的改革實踐[J].中國電力教育,2021(12):88-89.
[6] 沈進中,曹珍貫,朱洪波,等.新工科背景下“現代控制理論”教學改革與探索[J].電氣電子教學學報,2021,43(5):69-72,165.
[7] 鄭恩讓,王素娥.“現代控制理論”課程開放式試題設計[J].電氣電子教學學報,2021,43(4):140-142.
[8] 韓娜妮,徐秀妮.基于應用型大學工程項目為導向的“現代控制理論”教學改革[J].就業與保障,2021(10):156-157.
[9] 亢潔.新工科背景下《現代控制理論》教學改革與教材建設[J].中國新通信,2021,23(7):171-172.
[10] 王宇嘉,麻超,吳健珍.基于“現代控制理論”的課程思政教學設計探討[J].教育教學論壇,2021(5):137-140.
[11] 喬云芬.“現代控制理論”教學中仿真軟件的應用[J].科教文匯(中旬刊),2020(1):62-63.
[12] 潘俊濤,張巍巍,張白,等.現代控制理論課程教學改革研究——以便攜式倒立擺為例[J].中國教育技術裝備,2019(15):91-92,97.
[13] 李兵.《現代控制理論》教學改革探索[J].佳木斯職業學院學報,2018(5):275.
猜你喜歡
少男少女·教育管理(2022年3期)2022-05-12 23:54:31
課程教育研究(2017年40期)2017-11-17 16:29:05
中學歷史教學(2016年4期)2016-11-11 07:11:44
成才之路(2016年25期)2016-10-08 09:51:08
科技視界(2016年20期)2016-09-29 12:59:03
科技視界(2016年20期)2016-09-29 11:20:38
科技視界(2016年20期)2016-09-29 11:16:19
新課程研究(2016年21期)2016-02-28 19:28:26
中學歷史教學(2015年12期)2015-11-11 07:09:49
學習月刊(2015年18期)2015-07-09 05:41:22
