彈體侵徹過程主動磁探測識別方法
2024-03-11 11:11:30李長生
探測與控制學報 2024年1期
趙 靜,李長生
(南京理工大學智能彈藥技術國防重點學科實驗室,江蘇 南京 210094)
0 引言
在現代戰爭中,指揮中心、武器庫、通信站等目標逐漸由地上轉為地下,隱蔽性越來越強,其防御能力也越來越強[1],為了打擊這些高價值目標,硬目標侵徹武器應運而生。硬目標侵徹引信可控制彈藥按照設定的起爆方式、起爆時機使戰斗部在目標內部最佳位置起爆,其毀傷能力較常規武器可提高幾十倍[2]。20世紀90年代前,國內的侵徹引信大多數為固定延時引信,從90年代后才開始了對自調延期和可編程引信的研制,近年來又開始研究可計層、計空穴的硬目標靈巧引信[3]。
侵徹武器打擊目標常見為多層或厚目標,利用引信部位感知到的過載加速度信號來實時識別彈丸穿靶特征,可實現對多層或厚目標的精確打擊。計層起爆功能的核心技術是目標層數識別算法,而現有的目標識別算法完全依靠彈體侵徹每層靶板時產生過載加速度信號進行計算。而在實際侵徹過程中,由于彈體自身結構響應會產生大量的高頻振蕩信號并與引信部位的過載加速度信號相疊加致使穿層信號被淹沒,無法準確識別目標層數,難以進行精確打擊[4],并且當侵徹速度越快、彈體長徑比越大、靶板間距越小時,信號振蕩現象越嚴重[5]。針對侵徹多層目標時的過載信號振蕩問題,有學者提出小波分析[6]、短時傅里葉變換[7]、動態閾值[8]、盒差分濾波[9]等方法對過載信號進行處理;但是信號處理過程中參數設定均依賴于特定條件,在侵徹復雜多類目標時適應性較差,難以成為解決過載信號振蕩的有效方法[3]。
磁探測是通過感知磁場的變化來判斷是否有磁性物體靠近,因其識別能力強、定位精度高、反應迅速、隱蔽性好等優點被廣泛應用于軍事領域[10]。目前,磁探測主要應用于如坦克等鐵磁性裝甲目標識別[11-12]、反潛探測[13]、彈道修正[14]等。近幾年才開始有學者將磁探測用于解決侵徹問題。文獻[15]利用通電線圈在靶板內部建立了調制磁場,利用磁場的變化規律來表征彈丸的侵徹深度。目前基于磁探測的侵徹過程識別方法還處于初級階段,主要研究方向可分為被動磁探測與主動磁探測。文獻[4]提出基于地磁信號的磁異探測侵徹計層方法,通過在引信內部放置磁傳感器探測侵徹過程中引信內地磁信號的變化,屬于無源被動探測,所需的系統簡單,但會受不同地理位置地磁場方向、彈體著角、穿靶姿態等影響,引起磁傳感器探測信號變化,對于后期信號處理較為麻煩。相較于利用地磁場的被動探測,文獻[16]提出在引信內安裝磁鋼產生磁場的主動磁探測方法,利用磁傳感器感知侵徹過程鋼筋等鐵磁性物質與磁塊激發磁場耦合作用引起的引信內磁信號變化以此實現計層,論證了基于主動磁探測的磁信號計層可行性。由于遠程制導彈一般采用攻頂貫穿打擊方式,炮射攻堅彈采用平射或曲射,采用被動磁探測會增大后續信號處理、識別難度,而主動磁探測方法因磁塊和傳感器相對放置位置和方向可以人工設定,受穿靶工況影響較小,便于后續信號處理。
雙磁鋼激發磁場的主動磁探測方法[16],由于雙磁鋼體積大、安裝一致性差,且在侵徹過程中應力波會引起磁塊間相對位置微動,而這種微動所引起的磁場變化可能會比靶板中鋼筋引起的更強,給侵徹過程識別帶來不利影響。本文在其基礎上進行了改進,設計了一種基于單個磁塊產生磁場的主動磁探測侵徹過程識別方案,并分析了不同侵徹工況下引信內磁場變化規律。
1 主動磁探測原理
硬目標侵徹武器打擊的目標一般為鋼筋混凝土結構,其中的鋼筋屬于導磁性材料,侵徹戰斗部的彈體外殼一般為高強度鋼材料,引信位于戰斗部尾部,在引信內尾部放置磁塊產生磁場,彈體的鐵磁性外殼會對內部磁信號產生屏蔽作用,而引信管殼和底螺一般采用硬質鋁或鈦合金,所以在戰斗部尾部會有漏磁現象。當彈體侵徹鋼筋混凝土目標時,導磁性材料的鋼筋會對戰斗部周圍的磁場產生影響,尤其在戰斗部尾部影響更為明顯,所以可在引信內部敏感位置放置磁傳感器檢測彈體穿靶過程中的磁信號變化情況,并以此對侵徹過程進行識別,如圖1所示。
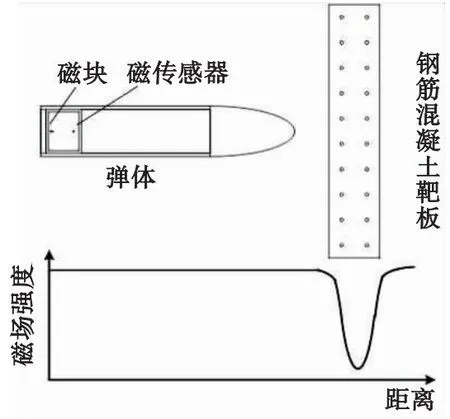
圖1 主動磁探測原理示意圖Fig.1 Schematic diagram of active magneticsounding principle
2 主動磁探測侵徹過程識別方案建模
本文提出一種在侵徹戰斗部內部敏感位置放置磁塊和磁傳感器來對不同工況侵徹過程進行識別的方法,利用COMSOL有限元分析軟件對磁探測戰斗部和鋼筋混凝土靶板進行建模。
2.1 鋼筋混凝土靶建模
建立鋼筋混凝土靶板模型如圖2所示,靶板為1.5 m×1.5 m×0.3 m的長方體。配筋方式如圖3,內部在兩個垂直方向上都有配筋形成雙層鋼筋網,鋼筋直徑20 mm,間距為150 mm,距離靶板邊界兩側距離為75 mm處開始配有鋼筋,兩層鋼筋網間距為150 mm。混凝土由水泥、沙、石組成,不具有磁性,其相對磁導率設為1。鋼筋的相對磁導率設為700。
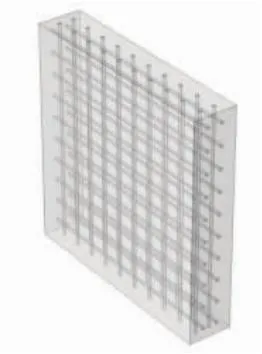
圖2 鋼筋混凝土靶板模型Fig.2 Reinforced concrete target plate model
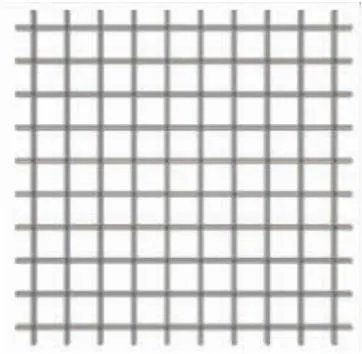
圖3 鋼筋網鋼筋分布圖Fig.3 Steel mesh reinforcement distribution map
由于磁塊和磁傳感器安置于引信內部,位于戰斗部尾部,而在實際侵徹過程中,當彈體侵徹鋼筋混凝土靶板時,由于彈頭的侵徹作用會使靶板留下孔洞,而磁傳感器感知的磁場為靶板被彈頭侵徹過后形成孔洞后的磁場大小,所以需要對靶板進行提前開坑處理。根據仿真彈體穿靶后留下孔洞大小對靶板的鋼筋混凝土和內部鋼筋網分別進行開孔,孔洞半徑大小為160 mm,開坑后的靶板模型如圖4所示。

圖4 開坑后的鋼筋混凝土靶板模型Fig.4 Reinforced concrete target plate model after pit opening
2.2 主動磁探測侵徹戰斗部建模
建立侵徹戰斗部幾何模型如圖5所示,戰斗部主要由外部殼體、炸藥、底螺、引信幾部分構成,引信安裝在戰斗部尾部如圖6所示,其中彈體長度為1 500 mm,直徑300 mm,彈體外殼厚度為20 mm,外殼材料為高強度合金鋼,相對磁導率為200。引信管殼近似為空心圓柱,長度200 mm,直徑為150 mm,殼體厚度為5 mm,底螺為厚度30 mm,直徑160 mm的圓柱體,引信殼體為硬質鋁,底螺為鈦合金,皆不具有磁性,相對磁導率都設置為1。

圖5 戰斗部幾何模型Fig.5 Warhead geometry model

圖6 戰斗部模型示意圖Fig.6 Warhead model diagram
磁塊與磁傳感器安裝于引信內部。為減少磁塊間及磁塊與傳感器之間的相對震動,采用單個磁塊產生磁場,磁塊的尺寸越大在侵徹過程中所受到的沖擊力越大,故磁塊采用半徑為3 mm,厚度為2 mm的薄圓柱體磁鋼。磁鋼材料選用釹鐵硼N35磁鐵,其最大磁能積為35 MGOe,剩余磁通方向為Z軸正方向。
根據以上設置的仿真參數,利用COMSOL分析軟件的“磁場,無電流”模塊對戰斗部及引信內部磁塊產生的磁場分布情況進行仿真。設置彈體周圍半徑為7 m的球形空氣分析域,并設置其為無限元域,模擬實際彈體侵徹環境。
仿真得到y平面內彈體磁場分布和彈體內部磁塊穿過鋼筋混凝土靶板時彈體-靶板耦合情況下磁場分布圖分別如圖7所示。可以看出由于高磁導率的戰斗部外殼對磁力線的聚磁效應,使得戰斗部外殼在前方和側方對內部磁塊產生的磁場形成了屏蔽作用,使得在戰斗部前方和側方漏磁現象較微弱,而在戰斗部尾部,底螺為鈦合金,相當于空氣,無任何屏蔽作用,大部分磁力線由尾部流出,使得戰斗部對尾部磁場變化較為敏感。如圖7(b)所示,當鋼筋混凝土靶板經由戰斗部尾部時,在彈體-靶板耦合作用下,會使引信內產生較強的磁場變化。
圖7 彈體-鋼筋混凝土靶板耦合下引信磁場分布變化圖Fig.7 Fuze magnetic field distribution map under projectile-reinforced concrete target coupling
2.3 確定磁塊與磁傳感器放置方案
磁塊與磁傳感器放置的相對位置的不同,對于磁場變化的敏感度也不同,需要對不同放置方案的引信內磁場變化進行仿真分析。建立彈體侵徹一層鋼筋混凝土靶板模型如圖8所示,將靶板放置于距彈尾部2 m處。

圖8 彈體侵徹一層鋼筋混凝土靶板模型Fig.8 Model of projectile penetrating a layer of reinforced concrete target plate
將磁傳感器放置位置記為點N,以點N位置處磁場強度變化代替磁傳感器對磁場變化的探測,通過在引信內多個位置多次仿真發現,將磁塊置于彈體尾部時,漏磁較強,對鋼筋擾動更敏感,故將磁塊放置于距離引信尾部15 mm處。當傳感器位置位于磁塊上下側時,由于引信內空間限制,探測點距離磁塊過近,磁場波動較大,無法探測出有效穿靶特征,放置在探測點位置右側與磁塊相距130 mm以內時,同樣無法獲取穿層時有效脈沖信號特征,故將點N置于引信軸線上距磁塊135,155,175 mm處,如圖9所示,設置侵徹速度為1 km/s,得到的仿真結果如圖10所示。

圖9 引信內磁塊及探測點N放置方案示意圖Fig.9 Schematic diagram of magnetic block and detection point N placement scheme in fuze

圖10 點N處侵徹過程磁場強度變化Fig.10 The change of magnetic field intensity during penetration at point N
可以看出三種情況下點N位置處感知到的磁場變化趨勢一致,點N位于距離磁塊135,155,175 mm三種情況下產生的脈沖高度分別為0.002,0.001 7,0.001 2 μT。隨著磁塊與磁傳感器之間距離的增加,磁場強度大小雖會減弱,穿靶過程中磁場變化產生的脈沖高度減小,但信號振蕩現象也會同步減弱,變化更為平穩,更利于脈沖信號識別。綜合考慮后,所有仿真都將磁傳感器位置放置于距離磁塊155 mm處。
為了分析磁塊的尺寸對其所激發磁場的磁感應強度大小的影響,分別對不同尺寸磁塊的主動磁探測侵徹過程進行仿真,仿真結果如表1所示。

表1 不同磁塊尺寸下的侵徹過程磁響應脈沖高度Tab.1 Magnetic response pulse height of penetration process under different magnetic block sizes
可以看出磁塊的尺寸越大,激發的磁場越強,在侵徹過程中產生的脈沖高度越大。但是由于侵徹過程需承受高過載,所以體積、質量不能太大,否則磁塊容易碎裂,并對電路板及引信其他零部件造成損壞。綜合考慮,選擇半徑3 mm,厚度2 mm磁塊。
3 不同侵徹工況仿真結果及分析
3.1 正侵徹仿真結果及分析
由于在現實作戰環境中,侵徹彈打擊目標結構復雜,所以需要對不同工況下侵徹過程磁信號探測進行仿真分析。常見打擊目標多為多層目標或厚目標。
3.1.1正侵徹多層靶磁信號特征分析
基于以上彈體侵徹一層鋼筋混凝土靶板模型,建立彈體侵徹三層靶模型,每層靶板間距3 m,劃分網格如圖11所示。

圖11 彈體侵徹三層鋼筋混凝土靶板模型Fig.11 Model of projectile penetrating three-layer reinforced concrete target plate
利用“穩態”研究模塊中“參數化掃描”方式對彈體侵徹過程進行求解,步長50 mm得到彈體侵徹三層鋼筋混凝土靶板時點N處磁信號變化情況如圖12所示。可以看出當彈體侵徹多層靶板時在距離第一層靶板約0.5 m處,在鐵磁性鋼筋的聚磁作用下,鋼筋對引信內部磁鋼產生的磁場開始產生影響,點N處感知的磁場強度開始減小,直至磁塊位置經過兩層鋼筋網之間時如圖中虛線處位置,點N處磁場強度達到最小,脈沖高度約0.001 7 μT。彈體繼續向前運動遠離靶板,鋼筋對引信內部磁場屏蔽作用減弱,點N處磁場強度逐漸恢復增大,直至彈體尾部穿出第一層靶板,點N處磁場強度恢復至初始狀態。侵徹第二層與第三層靶板時磁場變化情況與侵徹第一層靶板時一致,三層靶板對應三個尖峰脈沖信號,表明了主動磁探測對侵徹多層靶板時計層的可行性。
圖12 彈體侵徹三層鋼筋混凝土靶板點N處磁場強度變化Fig.12 Change of magnetic field intensity at N point of three-layer reinforced concrete target plate penetrated by projectiles
3.1.2正侵徹1 m厚靶磁信號特征分析
建立彈體侵徹1 m鋼筋混凝土厚靶模型,內部6層鋼筋網,每層鋼筋網間距150 mm,距離靶板邊界125 mm處開始配筋,并同樣進行開坑處理。模型如圖13所示。對彈體侵徹1 m厚靶過程中點N處磁場強度變化進行仿真分析,結果如圖14所示。

圖13 彈體侵徹1 m厚鋼筋混凝土靶板模型Fig.13 Model of projectile penetrating 1 m thick reinforced concrete target plate
在彈尾距離靶板0.5 m處,靶板中的鐵磁性鋼筋開始對引信內磁信號產生影響,點N處感知的磁場強度開始減小,當彈尾穿入第一層靶板鋼筋時,點N處磁場強度達到最低,脈沖信號變化強度為0.002 2 μT,彈尾繼續在靶板中穿行,點N處磁場強度一直處于磁屏蔽狀態,當彈尾穿行至靶板后半部分時,點N處磁場強度開始恢復,當彈尾完全穿出靶板并遠離靶板0.5 m時,靶板對彈體引信磁場影響消失,點N處磁場強度恢復至初始狀態。
3.2 斜侵徹仿真結果及分析
在實際侵徹過程中,通常情況下彈體并不會垂直入靶,彈體穿入鋼筋混凝土靶板時會與靶板之間存在一定的傾斜角度,所以需要對斜侵徹模型進行聯合仿真。為了簡化模型與運算,在模型建立時將靶板傾斜放置,同樣進行開孔處理,開孔形狀及大小按照侵徹實際穿靶路徑開孔。
3.2.1斜侵徹三層鋼筋混凝土靶板磁信號特征分析
建立彈體斜侵徹三層鋼筋混凝土靶板模型如圖15所示。侵角分別為10°和20°,仿真結果如圖16所示。
圖16 正侵徹與斜侵徹不同角度磁場強度變化情況對比Fig.16 Comparison of magnetic field intensity changes at different angles of positive invasion and oblique invasion
從圖16可以看出,斜侵徹與正侵徹時磁場強度變化趨勢一致,但由于在斜侵徹時,彈體侵徹鋼筋混凝土靶板著靶點相對正侵徹滯后,故斜侵徹較正侵徹磁信號變化滯后,角度傾斜越大,滯后越明顯。穿靶過程中產生的脈沖高度并無明顯變化,表明了主動磁探測方法應用于計層不受限于侵徹角度的適用性。
3.2.2斜侵徹1 m厚靶磁信號特征分析
建立彈體斜侵徹1 m厚靶模型如圖17所示。侵徹角分別為10°和20°,仿真結果如圖18所示。
圖17 斜侵徹1 m厚靶仿真模型Fig.17 Simulation model of oblique penetrating 1 m thick target

圖18 正侵徹與斜侵徹不同角度磁場強度變化情況對比Fig.18 Comparison of magnetic field intensity changes at different angles of positive invasion and oblique invasion
從圖18可以看出,在侵徹1 m厚靶時,斜侵徹與正侵徹時磁場強度變化趨勢仍然一致,由于斜侵徹時相較于正侵徹著靶點的滯后,斜侵徹時磁信號較正侵徹也相對滯后,斜侵徹角度越大,滯后現象越明顯。穿靶過程中產生的脈沖高度仍無明顯變化,表明了主動磁探測方法對斜侵徹厚靶也同樣適用。
對于磁響應信號檢測方案擬采用高旋彈藥引信地磁計轉數檢測方案[17],即利用線圈封裝在引信內,在侵徹過程中繞軸線旋轉切割磁力線產生感應電動勢以反映磁感應強度的變化,多層仿真信號變化強度為1.7 nT,脈寬0.6 ms;厚靶仿真信號變化強度為2.2 nT,脈寬1.65 ms。采用二級放大電路可以檢測出侵徹過程中磁場的變化。
4 結論
本文提出基于單個磁塊激發磁場的主動磁探測侵徹過程識別方法,并通過仿真分析了磁塊與磁傳感器放置位置對主動磁探測識別方法的影響,確定了磁塊與磁傳感器之間的放置方案。對彈體侵徹三層鋼筋混凝土靶和厚靶的侵徹過程進行仿真分析,并探討侵徹角度對不同工況侵徹過程識別的影響,得到如下主要結論:
1) 磁傳感器在引信內放置位置距離磁塊越遠,信號振蕩效果越弱,磁場強度變化越平穩,越利于侵徹過程識別。
2) 當彈尾穿入靶板時,由于鋼筋網的磁屏蔽效應,在穿過鋼筋網時會產生向下的負脈沖,穿出靶板后恢復至侵徹前初始狀態。論證了主動磁探測方法用于侵徹多層靶板和厚靶的可行性。
3) 在斜侵多層靶和厚靶時,由于彈體著靶點相對正侵后移,引信內磁信號變化也相對正侵徹滯后。侵徹角度越大,滯后現象越明顯,侵徹角度對斜侵徹穿靶過程中產生的磁信號脈沖高度無明顯影響。
本文提出了基于單個磁塊激發磁場的主動磁探測識別方法,但產生的脈沖磁信號強度較小,后續可通過優化彈體模型、磁塊模型、磁塊與傳感器相對放置位置方案等,進一步提高穿靶過程磁響應變化程度,以減小檢測難度。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42