橫風下基于滾動GAPSO算法的列車速度曲線優(yōu)化
2024-03-13 01:53:04申一非祁文哲李德倉陳曉強
鐵道標準設計 2024年3期
關鍵詞:風速
申一非,祁文哲,李德倉,3,4,陳曉強,
(1.蘭州交通大學機電技術研究所,蘭州 730070; 2.蘭州交通大學機電工程學院,蘭州 730070; 3.甘肅省物流與運輸裝備行業(yè)技術中心,蘭州 730070; 4.甘肅省物流及運輸裝備信息化工程技術研究中心,蘭州 730070)
引言
隨著我國鐵路事業(yè)的快速發(fā)展,ATO(Automatic Train Operation)技術的應用成為高速鐵路智能化的重要標志,ATO通過計算目標速度曲線控制列車運行[1]。列車運行過程中運行環(huán)境多變,橫風環(huán)境時列車運行速度的調整依靠駕駛員參考ATP曲線手動完成,這種方式依靠于駕駛員的操作經驗[2]。因此,橫風環(huán)境下實時生成目標速度曲線并實現節(jié)能性、準點性目標是列車自動駕駛的未來趨勢。
國內外學者對目標速度曲線的在線調整方面做了積極探索,冷勇林等[3]在專家系統(tǒng)基礎上,引入基于梯度下降法的在線調整方法,保證列車的準時性與停車精準性。FERNNDEZ等[4]采用動態(tài)非優(yōu)勢遺傳算法調整使列車恢復正點,通過在線重新計算偏離列車時刻表的偏差。HE等[5]提出一種收縮視界模型預測控制算法,利用實時交通信息規(guī)劃高速列車的最優(yōu)軌跡。朱宇清等[6]提出一種基于神經網絡模型的實時速度曲線規(guī)劃算法來優(yōu)化列車操縱指導。張江濤等[7]提出一種改進MH算法實時計算列車運行操縱序列。SONG等[8]首次采用雙速度曲線優(yōu)化方法對實際速度曲線進行優(yōu)化,包含離線全局優(yōu)化和在線局部優(yōu)化兩個過程。以上學者們均對列車速度曲線的在線調整進行了研究,但未考慮橫風環(huán)境下列車臨時限速的情況,也未以節(jié)能性和準時性為目標,進行列車速度曲線實時調整和優(yōu)化。目前,橫風環(huán)境下列車目標速度曲線優(yōu)化的研究較少,張江濤等[9]設計了RH-PSO算法針對臨時限速實時生成目標速度曲線,但未考慮橫風環(huán)境和運行能耗的進一步優(yōu)化,也未評價算法的性能指標。
綜上,為解決普通環(huán)境下的列車目標速度曲線優(yōu)化及在線調整算法不適用橫風環(huán)境下列車速度曲線優(yōu)化的問題,在考慮風速阻力的基礎上,建立以節(jié)能、準時為目標,以列車速度、距離為約束的目標列車模型,再加以對橫風來臨時的限速場景分析,提出一種橫風環(huán)境下的滾動GAPSO算法實時生成列車目標速度曲線并優(yōu)化,研究成果可為高速列車在橫風環(huán)境下節(jié)能、準時運行提供指導。
1 模型建立
1.1 列車動力學分析
傳統(tǒng)的列車動力學分析將列車看作單質點受力分析,結構較為簡單,將高速列車看作一定長度的質點鏈,其中一定長度為列車的編組長度,并對列車進行受力分析。該模型考慮了列車組的長度并減少了計算誤差,列車模型見圖1。

圖1 列車模型
本次研究的高速列車運行方式為動車組重聯,該運行方式是高速列車動車組的一種常見運行方式,即兩列同型號的動車組之間聯掛運行,運行前進方向的第一列動車組負責操縱。
橫風環(huán)境下,需考慮橫風對列車作用的空氣阻力[10]。橫風條件下,風向與列車側面成90°,即理想狀態(tài)時,動力學模型為
式中,t、x、v分別為運行時刻、運行位置和運行速度;F為列車牽引力;B為制動力;W為列車運行阻力;W0為基本阻力;Wi為坡道阻力;i1為列車本務端坡道坡度,i2為列車非本務端坡道坡度;l1為列車在坡道上的長度;l為列車長度;Wr為曲線阻力;Ws為隧道阻力;a、b、c為與車型相關的經驗常數;fw為空氣阻力;ρ為空氣密度;Sw為列車橫截面積;vw為橫風風速;D為經驗常數,取值一般為2 000;R為彎道半徑;L為隧道長度。
不同橫風下對應的列車最高運行速度[2]見表1,為仿真過程中增加不同橫風環(huán)境對應的臨時限速區(qū)提供基礎。

表1 不同橫風下列車安全運行速度
1.2 全局目標及約束條件
本文算法的優(yōu)化目標為在滿足約束條件的前提下,列車運行能耗和運行時間總體最優(yōu),即列車的節(jié)能性指標和準時性指標組成的總目標最優(yōu)。
列車的載客量、牽引力、制動力都會引起能耗產生,但列車能耗主要由牽引力造成[11],因此,本研究對象為牽引力做功產生的能耗,即
(2)
式中,F為牽引力;v為列車運行速度;t為運行時間;E為運行總能耗。
節(jié)能性指標為
(3)
式中,Emax為快行策略下的能耗。
列車在橫風環(huán)境下運行時,臨時限速會造成列車不能準點到達,應在安全約束下盡量保證準時性。列車的運行時間需與計劃運行時間存在極小誤差,一般誤差定義為5%[12],滿足誤差范圍,則視為滿足準時性。
準時性指標為
(4)
式中,Tp為實際運行時間;T為計劃運行時間;Kt值越小,代表誤差越小、準時性越好。
綜上,基于節(jié)能性與準時性的目標函數為
minKm={ω1Ke+ω2Kt}
(5)
式中,Km為總的優(yōu)化目標;ω1,ω2為指標權重值。
約束條件為
(6)
式中,v、vA分別為列車運行速度與最大常用模式制動曲線速度,防止觸發(fā)緊急制動[13];v0、vt分別為列車初始速度與列車到站停車速度;x(0)、x(t)分別為列車運行起點位置和列車到站的終點位置。
適應度函數為
(7)
(8)
式中,f1為首次采用GAPSO算法的適應度,以節(jié)能和準時總體最優(yōu)為目標;f2為第二次采用GAPSO算法的適應度,以準時為目標。適應度值越高,目標的評價指標越優(yōu)。
2 模型求解
2.1 基于滾動GAPSO算法的模型求解
本文設計一種滾動GAPSO算法,其中滾動優(yōu)化框架解決速度曲線實時調整問題,GAPSO算法解決列車速度曲線優(yōu)化問題。滾動優(yōu)化的優(yōu)點是實時性強、復雜度小、可調整性強,通過當前時刻的信息預測未來時間段的狀態(tài),并利用預測的狀態(tài)對問題在線求解[14]。通過滾動固定時間窗口,每隔時間窗口讀取當前線路信息、ATP曲線信息,求解改進快行策略曲線[9],并結合GAPSO算法尋優(yōu)列車巡航速度與惰行點,實時生成適應于橫風環(huán)境下的目標速度曲線。
由于RH-PSO算法[9]只考慮列車快到站時尋找惰行點節(jié)省能耗但并未考慮列車未到站之前運行的能耗,基于此進行改進,在列車未快到站時,根據初始線路條件信息、列車參數信息,采用GAPSO算法尋優(yōu)快行策略的巡航速度,并生成一條優(yōu)化后的目標速度曲線,并在列車牽引、巡航階段按照該速度曲線運行,直至優(yōu)化后的目標速度曲線與改進快行策略曲線交匯,即前方有橫風限速區(qū)時,切換至改進快行策略運行;列車快到站并未晚點時,采用GAPSO算法尋優(yōu)惰行點,生成目標速度曲線。
滾動GAPSO算法流程見圖2。
滾動GAPSO算法實現步驟如下。
(1)讀取列車時刻表信息、車輛信息、線路參數信息、ATP曲線信息并對時間窗口長度Δt賦值。
(2)采用GAPSO算法尋優(yōu)快行策略的巡航速度,計算優(yōu)化后的目標速度曲線。
(3)進入時間窗口Δt,讀取當前線路信息、列車狀態(tài)信息、行車許可(MA)信息、ATP速度曲線信息。計算改進快行策略曲線,列車按照步驟(2)的目標速度曲線運行。對比MA終點與進站信號機的位置,判斷列車是否快到站,若是,執(zhí)行步驟(5);若否,則判斷當下運行曲線是否為改進快行策略曲線,若是,輸出目標速度曲線;若否,則判斷步驟(2)的目標速度曲線是否與改進快行策略曲線交匯,若是,切換至改進快行策略并輸出目標速度曲線,避免晚點放大,執(zhí)行步驟(4);若否,則輸出步驟(2)的目標速度曲線,執(zhí)行步驟(4)。
(4)進入下一個時間窗,執(zhí)行步驟(3)。
(5)判斷列車是否晚點,若是,輸出目標速度曲線并執(zhí)行步驟(7);若否,執(zhí)行步驟(6)。晚點判斷公式如下
t+tk>T
(9)
式中,t為列車已運行時間,即時間窗口之和;tk為使用快行策略到站時間;T為計劃運行時間。
(6)采用GAPSO算法尋優(yōu)列車惰行點,輸出目標曲線,執(zhí)行步驟(7)。
(7)結束進程。
2.2 基于GAPSO算法的尋優(yōu)
通過改進GA算法的雜交概率和變異概率,并將改進GA算法的交叉、變異操作引入PSO算法,使用精英策略擴大樣本空間、擇優(yōu)選擇,最終得到較GA算法、PSO算法性能更好的GAPSO算法尋優(yōu)。
2.2.1 GAPSO算法尋優(yōu)巡航速度
采用GAPSO算法尋優(yōu)快行策略巡航速度va,根據列車的動力學模型、目標函數,GAPSO算法尋優(yōu)巡航速度的步驟如下。
(1)讀取列車信息、線路信息、ATP曲線信息,隨機生成種群規(guī)模為2N的粒子群記為H,H={H1,H2,H3,…,H2N},并隨機生成粒子對應的位置與速度序列,對一定范圍內的巡航速度va實數編碼,從而初始化種群。每個粒子代表變量va的解,即一條列車運行曲線。
va的搜尋范圍為vk-20≤va≤vk(km/h),vk為快行策略曲線的巡航速度,通過規(guī)定va的搜尋范圍,避免因過度追求節(jié)能而造成晚點放大。
(2)更新粒子的速度和位置更新公式為
(10)
(11)
在整個搜索過程的前期和后期對ω取值需求不同,前期需要擴大搜索范圍,ω取值應較大;后期搜索需要更仔細,ω值應減小。所以,采用一種線性遞減慣性權重[16]的方法對權重值更新。
(12)
式中,t為迭代次數;tmax為算法的最大迭代次數;研究表明,ωmax=0.9,ωmin=0.4時,粒子群算法能夠得到很好的收斂效果[15]。
(3)結合GA算法,計算粒子的適應度并將其排序,適應度函數為式(7),此時以節(jié)能和準點為目標。將適應度值較好、規(guī)模為M的粒子復制到子代,剩下規(guī)模為N的粒子,按照雜交概率Pc、變異概率Pm,確定相應粒子進行交叉和變異操作。研究表明,雜交、變異概率取值與種群的收斂程度有關,種群收斂集中時,應增大Pm、減小Pc;反之,增大Pc、減小Pm,Pc、Pm取值為
(13)
(14)
式中,fc為兩個待雜交粒子中適應度較高的值;favg為粒子種群平均適應度;fmax為粒子種群最大適應度;fm為變異粒子的適應度;通常取值pc1=0.9,pc2=0.6,pm1=0.009,pm2=0.001。
(4)雜交后粒子的速度位置公式為
(15)
(16)
式中,pb的取值范圍在[0,1]內隨機取值。
變異后粒子位置更新公式[17]為
(17)
式中,A(0,1)表示服從期望為0,方差為1的高斯分布。
(5)更新交叉和變異后的粒子的適應度值,對種群的Pbest、Gbest進行計算和更新。
(6)判斷是否滿足迭代條件,若滿足則退出,輸出優(yōu)化后的目標速度曲線;否則,循環(huán)步驟(2)~(4)。
GAPSO算法流程見圖3。
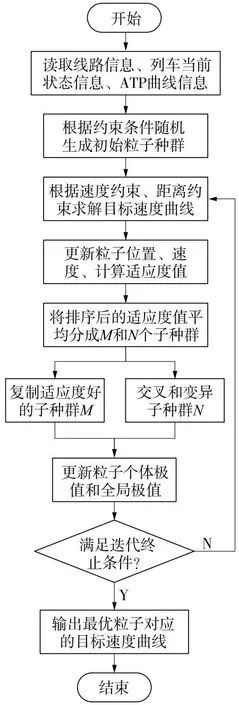
圖3 GAPSO算法流程
2.2.2 GAPSO算法尋優(yōu)惰行點
列車辦理進站時,若未晚點,采用GAPSO算法尋優(yōu)惰行點。根據列車的動力學模型、目標函數,GAPSO算法尋優(yōu)惰行點的步驟如下。
讀取列車信息、線路信息、ATP曲線信息,隨機生成種群規(guī)模為2N的粒子群記為H,H={H1,H2,H3,…,H2N},并隨機生成粒子對應的位置與速度序列,對一定范圍內的惰行點x實數編碼,從而初始化種群,每個粒子代表x變量的解,即一條列車運行曲線。
粒子搜尋x的范圍為X≤x≤Xs(m),X為列車當前位置;Xs為列車起模點[9]位置。
該種情況下的GAPSO算法,在計算適應度值并排序時的適應度函數為式(8),此時以準點性為目標尋找惰行點,算法剩余步驟與GAPSO尋優(yōu)巡航速度部分剩余步驟相同。
為驗證本文GAPSO算法性能,將GAPSO算法、GA算法、PSO算法對基準測試函數Sphere函數進行仿真,驗證本文GAPSO算法的性能,仿真結果見圖4。
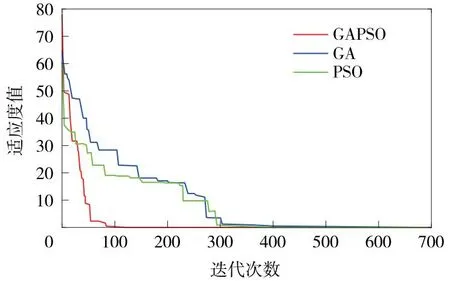
圖4 GAPSO算法仿真結果
由圖4可知,本文采用的GAPSO算法尋優(yōu)結果與收斂效果相較于GA算法和PSO算法更好,兼顧尋優(yōu)速度快和收斂精度高的優(yōu)點,并改善了局部搜索能力。
3 案例仿真
我國高速列車大風天氣條件下動車組行車時,為保證高速列車安全運行,大風預警系統(tǒng)根據所測數據下達合理的行車速度限制指令信息[18]。根據不同橫風環(huán)境,增加臨時限速區(qū)模擬大風預警系統(tǒng)下達的限速信息。為驗證滾動GAPSO算法求解橫風環(huán)境下列車ATO目標曲線優(yōu)化問題的有效性,選擇CRH3車型結合武廣高鐵某段線路進行仿真研究,線路長度363.047 km,圖定運行時間4 080 s,列車性能參數、線路屬性如表2所示,時間窗口長度為10 s[19],仿真結果與文獻[9]中RH-PSO算法的仿真結果對比。
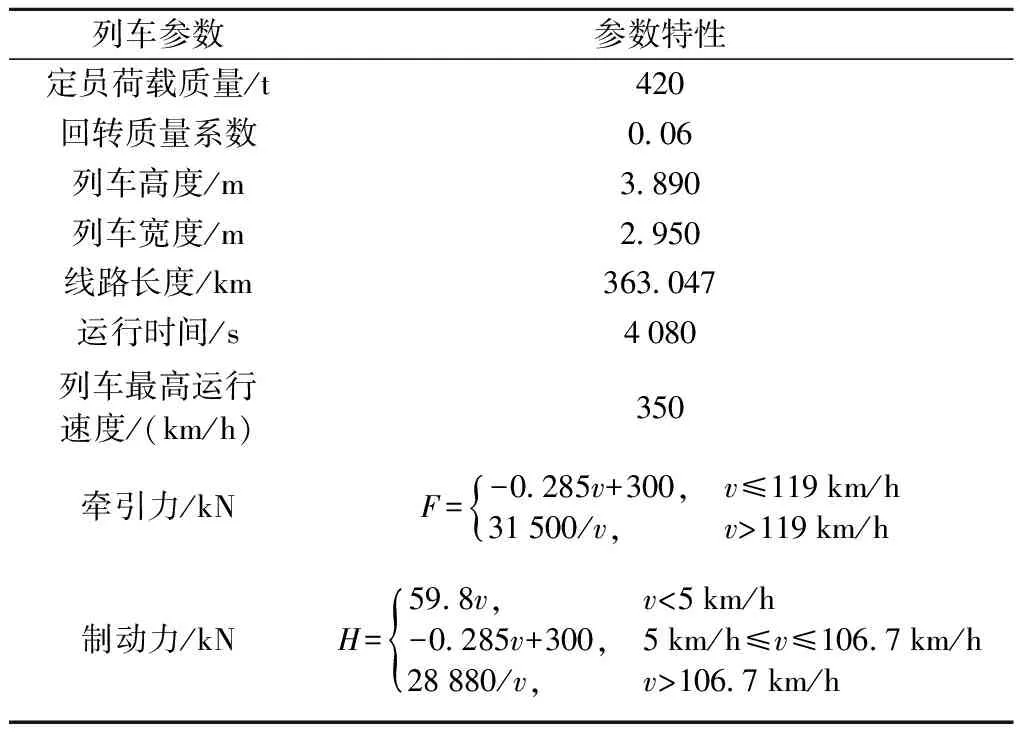
表2 列車性能參數
3.1 橫風風速12.5 m/s內時
選取風速12.5 m/s內的橫風環(huán)境進行仿真,此時列車限速為350 km/h,由于列車最高速度不超過350 km/h,不必設立臨時限速區(qū)。滾動GAPSO算法在風速12.5 m/s內情況下,仿真所得的目標速度曲線如圖5所示,仿真計算的運行能耗和時間結果如表3所示。
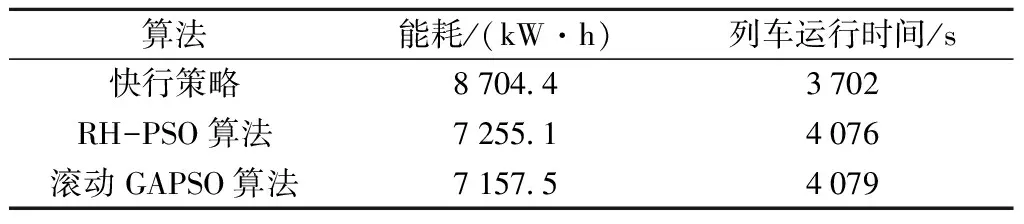
表3 風速12.5 m/s內時運行能耗和時間仿真結果
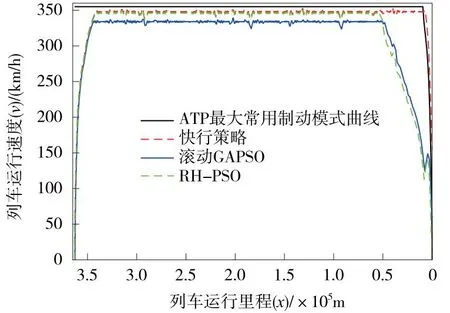
圖5 風速12.5 m/s內時列車目標速度曲線
運行時間方面:滾動GAPSO算法的運行時間與快行策略相差377 s,與RH-PSO算法相差3 s,與計劃時間相差1s,不超過規(guī)定運行時間,滿足準時性。
節(jié)能性方面:滾動GAPSO較快行策略節(jié)省17.77%的能耗,較RH-PSO算法節(jié)省1.35%的能耗,證明滾動GAPSO算法具有更好的節(jié)能性。
3.2 橫風風速為20 m/s時
臨時增加一段長度20 km、限速200 km/h的限速區(qū),模擬一段橫風區(qū)長度20 km,風速20 m/s的橫風環(huán)境;臨時增加一段長度40 km,限速速度200 km/h的限速區(qū),模擬一段橫風區(qū)長度40 km,風速20 m/s的橫風環(huán)境,橫風限速區(qū)信息如表4所示。滾動GAPSO算法在橫風風速20 m/s的環(huán)境下,仿真所得的目標速度曲線如圖6、圖7所示,仿真計算的運行能耗和時間結果如表5所示。

表4 橫風限速區(qū)信息

表5 橫風風速20 m/s時運行能耗和時間仿真結果

圖6 橫風風速20 m/s長度20 km時列車目標速度曲線
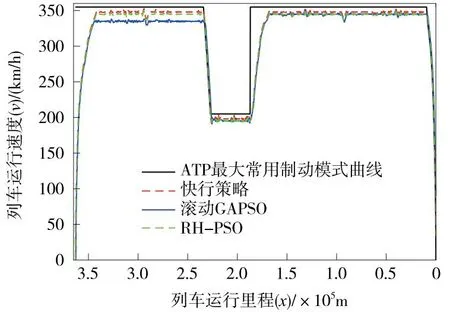
圖7 橫風風速20 m/s長度40 km時列車目標速度曲線
準時性方面:當橫風風速為20 m/s、風速區(qū)長度為20 km時,滾動GAPSO算法運行時間等于規(guī)定時間,滿足準時性;當橫風風速為20 m/s、風速區(qū)長度為40 km時,快行策略也超出計劃時間到達,此時滾動GAPSO算法運行時間與快行策略相差46 s,與RH-PSO算法相差3 s,滾動GAPSO算法誤差低于計劃時間的5%,滿足準時性。
節(jié)能性方面:當風速區(qū)長度為20 km時,滾動GAPSO算法較快行策略節(jié)省8.79%能耗,較RH-PSO算法節(jié)省0.79%能耗;當風速區(qū)長度為40 km時,滾動GAPSO算法較快行策略節(jié)省3.40%能耗,較RH-PSO算法節(jié)省0.77%能耗。因此,滾動GAPSO算法在節(jié)能方面均優(yōu)于快行策略與RH-PSO算法。
3.3 橫風風速大于30 m/s時
根據動車組列車遇大風行車限速的規(guī)定,當風速大于30 m/s時,列車不得駛入風速區(qū),應在風速區(qū)之前緊急制動停車[20]。假設列車運行中,前方出現風速大于30 m/s的橫風環(huán)境,為模擬該橫風環(huán)境,在風速區(qū)前增加臨時限速區(qū),使列車在風速區(qū)之前制動。滾動GAPSO算法在橫風風速大于30 m/s時,仿真所得的目標速度曲線如圖8所示,仿真計算的運行能耗和時間結果如表6所示。

表6 橫風風速大于30 m/s時運行能耗和時間仿真結果

圖8 橫風風速大于30 m/s時列車目標速度曲線
準時性方面:由于橫風風速大于30 m/s時,為保障乘客安全,列車需在風速區(qū)前制動,此時不考慮列車到站的準時性。
節(jié)能性方面:橫風風速大于30 m/s時,滾動GAPSO算法能在風速區(qū)前制動停車,滾動GAPSO算法較快行策略節(jié)省4.84%能耗,較RH-PSO算法節(jié)省1.76%能耗。證明滾動GAPSO算法較快行策略與RH-PSO算法的節(jié)能性更好。
4 結論
針對橫風環(huán)境下列車目標速度曲線優(yōu)化問題,提出一種滾動GAPSO算法求解,并通過仿真驗證,得到以下結論。
(1)通過構建橫風環(huán)境下的列車動力學模型,兩次采用GAPSO算法分別尋優(yōu)巡航速度和惰行點,并與滾動思想結合,解決了不同橫風環(huán)境臨時限速下的列車目標速度曲線實時生成問題。
(2)通過基準測試函數對GAPSO、GA、PSO算法仿真對比,證明本文GAPSO算法性能指標的優(yōu)越性。
(3)應用武廣高鐵363 km的線路進行仿真,證明滾動GAPSO算法較已有研究成果更節(jié)約能耗的同時,保證準時性。
(4)本文只考慮了某一段線路受橫風影響的情況,還應考慮多段橫風區(qū)對線路的影響,這將會作為今后進一步研究的重點。
猜你喜歡
氣象與環(huán)境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
