影響振蕩射流分離控制效果的關鍵因素
2024-03-18 07:39:02孫啟翔王萬波王勛年潘家鑫
空氣動力學學報 2024年2期
孫啟翔,王萬波,*,黃 勇,王勛年,潘家鑫
(1. 空天飛行空氣動力科學與技術全國重點實驗室,綿陽 621000;2. 中國空氣動力研究與發展中心 低速空氣動力研究所,綿陽 621000;3. 中國空氣動力研究與發展中心 計算空氣動力研究所,綿陽 621000)
0 引言
振蕩射流激勵器沒有任何運動部件,具有結構簡單、魯棒性強等優點,已在流動分離控制[1-2]、燃燒控制[3]等問題上得到了廣泛應用。典型振蕩射流激勵器由射流入口、反饋通道、混合段和擴張段組成,射流流入混合段后,康達效應(Coanda effect)會使其附著于混合段的一側壁面,同時部分流體會流經反饋通道,并在出口處撞擊射流使其偏向另一側,從而使射流振蕩。
按照振蕩形式可以將振蕩射流分為掃掠式和脈沖式。關于掃掠式激勵器的應用研究有:在NASA ERA項目支持下,加州理工學院[4]完成了14% 縮比垂尾模型的振蕩射流風洞試驗,Boeing[5-6]完成了B-757全尺寸垂尾模型風洞試驗,并完成了裝有31個激勵器的B-757 ecoDemonstrator飛行試驗,最終實現16% 的垂尾側力增量;在NASA AATT項目的支持下,NASA Langley研究中心[7-10]在10% 縮比的NASA CRM標模上,采用施加振蕩射流控制的簡單襟翼,以可接受的供入流量和壓比使其達到傳統增升裝置的增升效果;此外還有其他學者采用掃掠式激勵器開展了抑制翼型[11-12]、機翼[13-14]簡單襟翼分離的研究。
脈沖式激勵器也有廣泛應用。在歐盟AFLoNext項目的支持下,Schloesser等[15]完成了1∶8.4縮比的大涵道比短艙-機翼模型振蕩射流風洞試驗,使翼段増升2%。在此基礎上,Shay等[16]在INAFLOWT項目的支持下完成了基于吸氣-振蕩射流的短艙-機翼模型流動分離控制風洞試驗,使翼段増升3%。此外,Wilson等[17]研究了吸氣-振蕩射流參數對鈍體減阻效果的影響。Bauer等[18-19]設計了一種脈沖式激勵器,實現了翼型和機翼翼尖前緣流動分離控制。Dolgopyat等[20]在IAI AR2翼型上實現了基于吸氣-振蕩射流的虛擬格尼襟翼和虛擬減速板。
在激勵器幾何參數對射流振蕩特性的影響研究方面,Bobusch等[21]研究了無來流時激勵器幾何參數對射流的影響,結果表明反饋通道和擴張段的影響很小,而喉道高度對射流偏角有較大影響。孫啟翔等[22]的研究指出,反饋段越長,激勵器越易啟動;減小擴張段長度可以減少內流損失與射流停滯時間;射流振蕩頻率主要由反饋流速和混合段容積決定。周鑾良等[23]研究了激勵器出口分流裝置對流場的影響,發現該類激勵器的出口速度分布具有三峰值特性。此外還有學者研究了激勵器內外流動結構[24-25]。在激勵器外形對分離控制效果的影響研究方面,Melton等[26]設計了三種激勵器,并根據翼型分離控制效果選出最優外形。Koklu[27]比較了擴張段長短對逆壓梯度斜坡分離控制效果的影響,結果表明增加擴張段長度可以改善控制效果。
由于目前尚無文獻系統地給出射流振蕩特性對流動分離控制效果的影響規律,起主要作用的控制參數也有待進一步明確,因此本文選取ERA[4]、AATT[26]和INAFLOWT[16]項目中使用的激勵器,基于偏轉襟翼具體分析不同射流激勵器的流場特性和分離控制效果,找尋影響控制效果的關鍵因素。
1 模型與研究方法
1.1 研究模型
振蕩射流激勵器的主要幾何參數有入口高度b、混合段擴張角θm、混合段高度hm、喉道高度ht、擴張段擴張角θe、出口高度he,如圖1所示,本文b= 6 mm。選取文獻中的激勵器SJ1[4]、SJ2[26]和PJ[16],將SJ2的擴張段截短生成SJ2-1,移除PJ內的尖劈生成PJ-1,上述激勵器即為本文研究對象,其中PJ為脈沖式激勵器,其他為掃掠式激勵器,其外形和主要幾何尺寸如圖2和表1所示。偏轉襟翼主要幾何參數為:平板長度lp= 600 mm、射流縫高度hd= 0.5b、轉軸半徑ra= 7.5b、襟翼偏角θf= 30°、襟翼弦長cf= 120 mm、襟翼展長為16b,參考面積為襟翼面積,偏轉襟翼外形和激勵器布置方式如圖3所示。
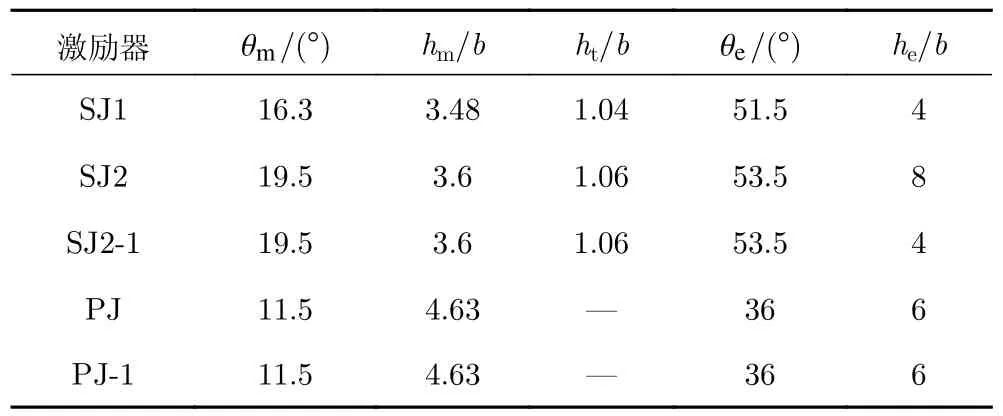
表1 激勵器主要幾何尺寸Table 1 Actuator geometric parameters
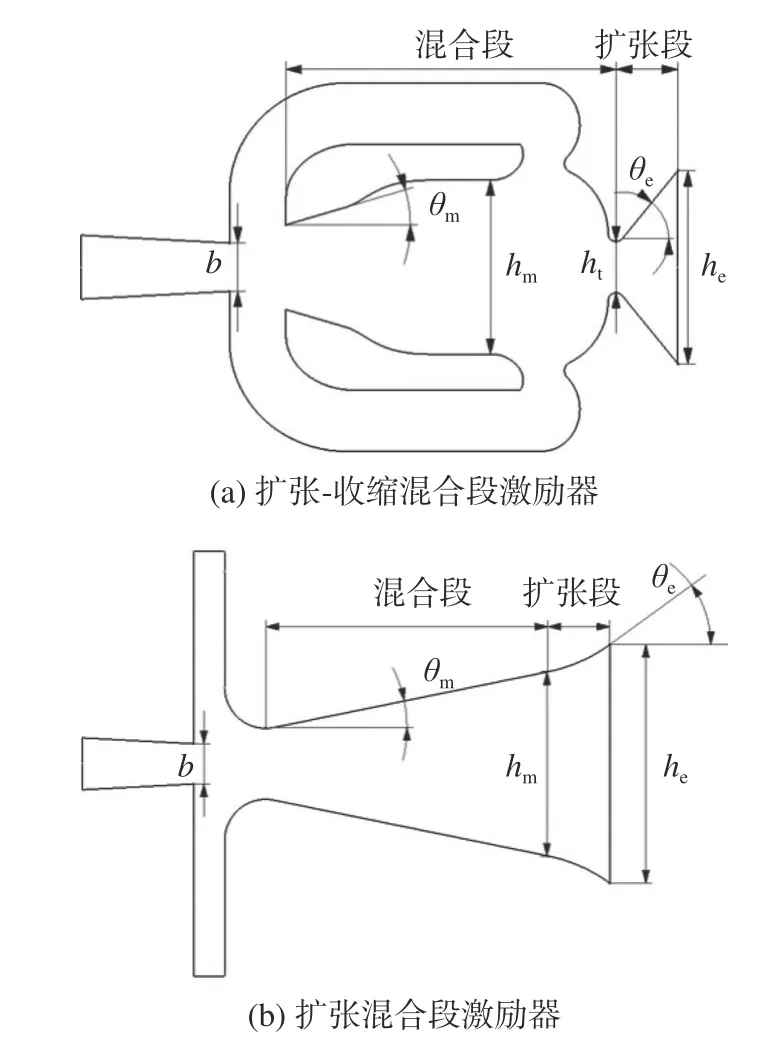
圖1 激勵器幾何參數Fig. 1 Actuator geometric parameters
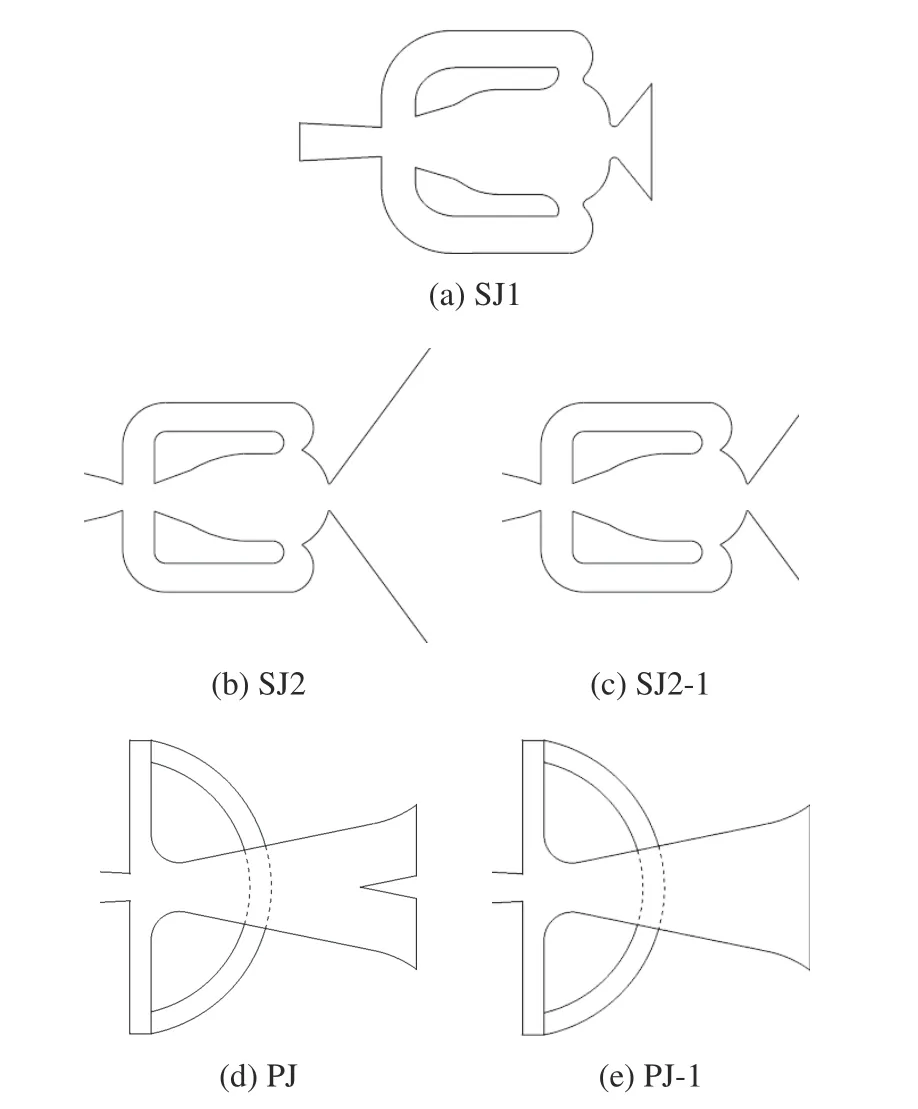
圖2 文獻[4, 16, 26]中的激勵器及其改型Fig. 2 Typical actuators[4, 16, 26] and their variations
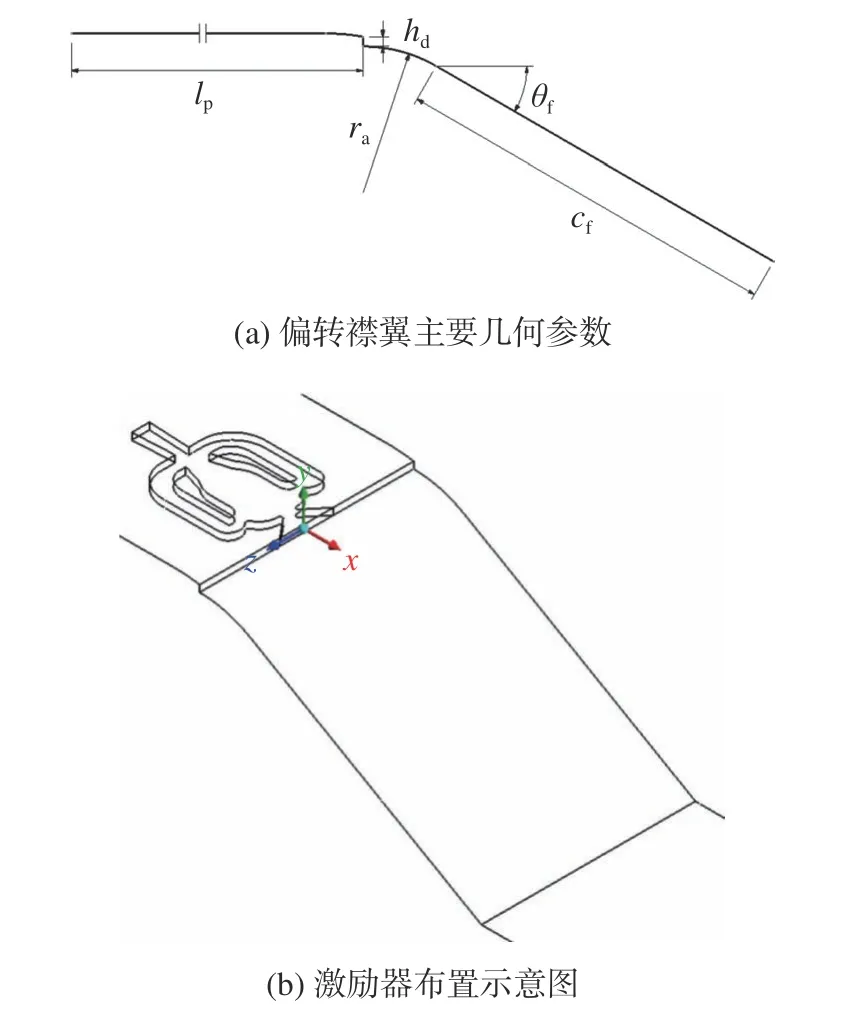
圖3 偏轉襟翼示意圖Fig. 3 Sketch of the deflection flap
1.2 研究方法
通過求解三維可壓縮雷諾平均Navier-Stokes方程對流場進行非定常數值模擬,離散化方法為有限體積法,空間離散格式采用二階精度迎風格式,時間推進采用下上對稱高斯-賽德爾(lower-upper symmetric Gauss Seidel, LU-SGS)隱式時間推進算法,湍流模型采用SSTk-?湍流模型。
以zx平面作為激勵器內流監測面,該面與激勵器出口截面的交線為監測線。計算域及邊界條件如圖4所示,z向的兩個側面采用周期性邊界條件。遠場大氣參數取海平面標準大氣參數,來流流速取34 m/s,激勵器入口處總壓與遠場靜壓之比np取1.5,參考文獻[24-25]取時間步長為1×10-5s,計算時長為0.2 s,取0.1 s后的計算結果進行分析。
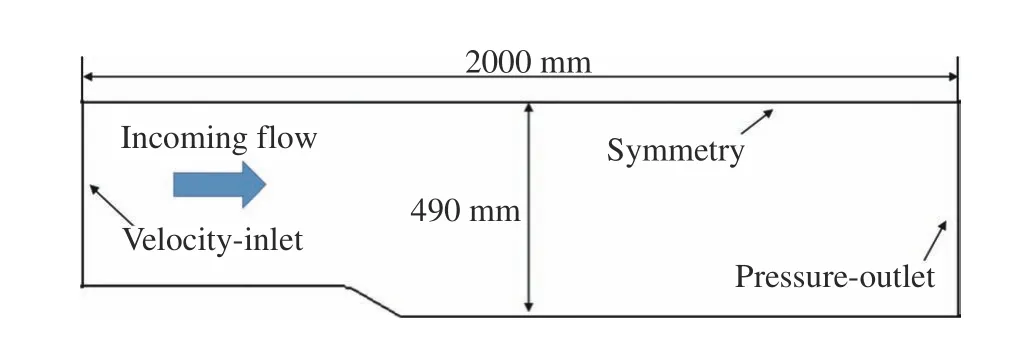
圖4 計算域尺寸Fig. 4 Sketch of the computational domain
1.3 研究方法驗證
為驗證研究方法的合理性,以文獻[28]和[24]中的振蕩射流激勵器為驗證模型進行數值模擬,并與文中試驗結果進行對比,驗證模型如圖5所示。文獻[28]給出了不同射流馬赫數Ma與射流振蕩頻率f的關系,文獻[24]給出了出口流速voutlet= 11 m/s時不同相位?對應的激勵器內流場。圖6給出了數值模擬與試驗結果的對比,可知兩者一致性較好。
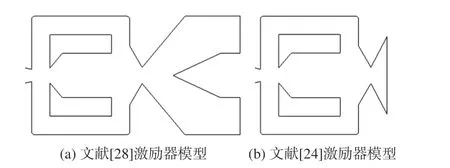
圖5 激勵器模型Fig. 5 Two actuator models
為保證計算結果的網格無關性,對振蕩射流激勵器和偏轉襟翼分別劃分三套網格進行數值模擬,如圖7所示,激勵器監測線上的最大速度值vmax和偏轉襟翼的阻力系數CD如表2所示,結果表明中等網格的預測結果已經滿足要求,故在后續計算中采用中等網格。
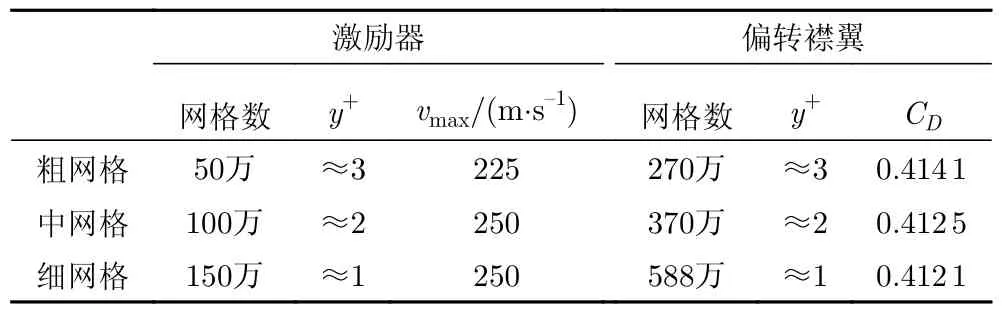
表2 網格無關性驗證Table 2 Grid independence verification
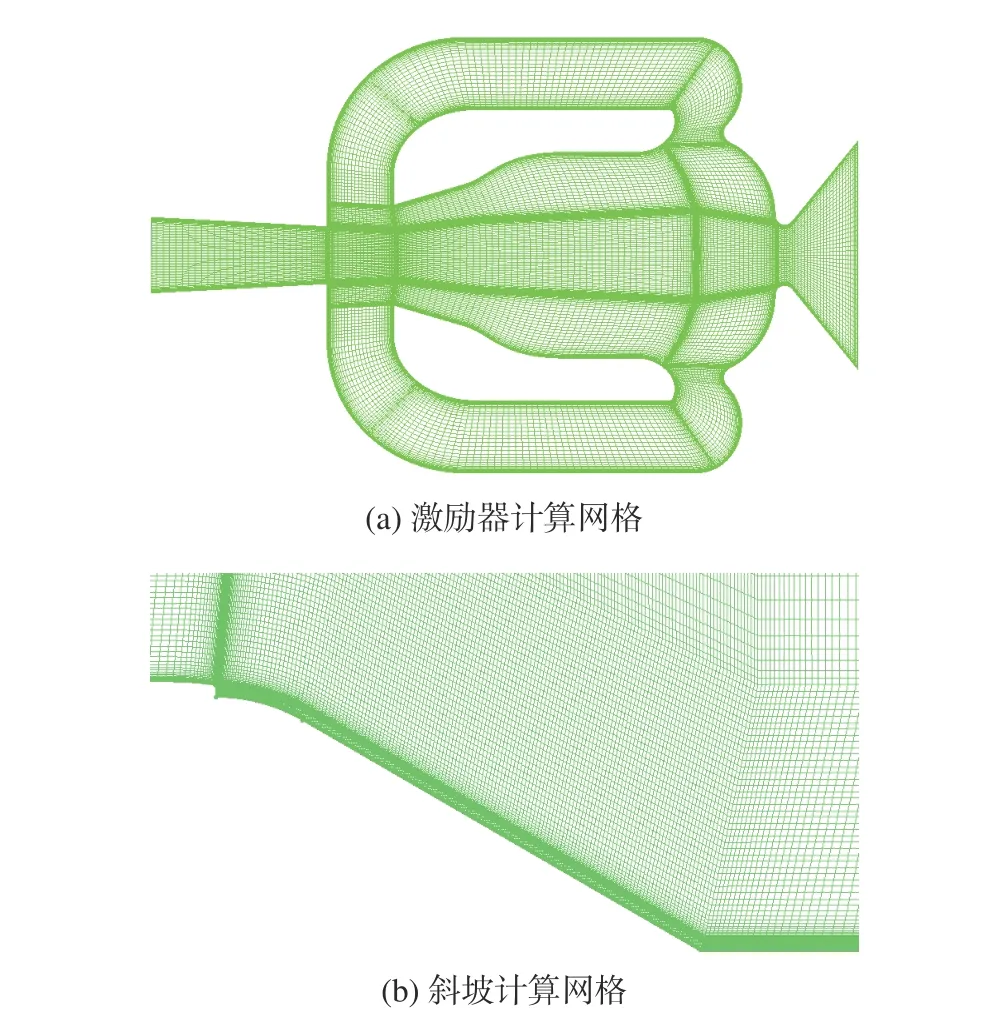
圖7 中等計算網格Fig. 7 Sketch of computational mesh
2 掃掠式振蕩射流分離控制效果影響因素分析
由于文獻[1,4-6,11-13,25,27]中的激勵器均采用了SJ1,故本節也采用SJ1施加振蕩射流,分析控制后的偏轉襟翼流場特性,以及射流在兩側停滯對分離控制效果的影響和造成停滯的原因;SJ2擴張段較大,但文獻[26-27]均未說明擴張段大小的影響,故本節比較SJ2與SJ2-1的內外流場,分析擴張段大小對激勵器出口流場特性和分離控制效果的影響規律。
2.1 掃掠式振蕩射流分離控制特點
圖8為有無SJ1控制的偏轉襟翼CD隨時間的變化。從圖中可見,時均阻力系數CD,mean為0.1084,無控制時CD,mean為0.1441。以一周期內監測線上最大流速vmax的時均值vmax,mean衡量內流損失,SJ1中射流vmax,mean為215 m/s,射流振蕩頻率f為371 Hz。激勵器內時均流場如圖9所示,由圖9(b)可知監測線上的時均速度vmean分布存在兩個峰值,表明射流向vmean峰值所在位置傳遞動量較多,且該位置的速度方向代表了射流動量的主要傳遞方向,故定義兩峰值的間距為時均偏移量zj,兩峰值處vmean方向與x軸的夾角為時均偏角θj,則SJ1中射流的zj為±2.6 mm,θj為±17.4°。需要注意的是,圖9(b)中vmean分布在z=±10 mm處存在兩個小峰值,結合監測線上x向時均速度vx,mean分布可知,該峰值處的vx,mean為負,即其方向為x軸反向,表明出現了回流。
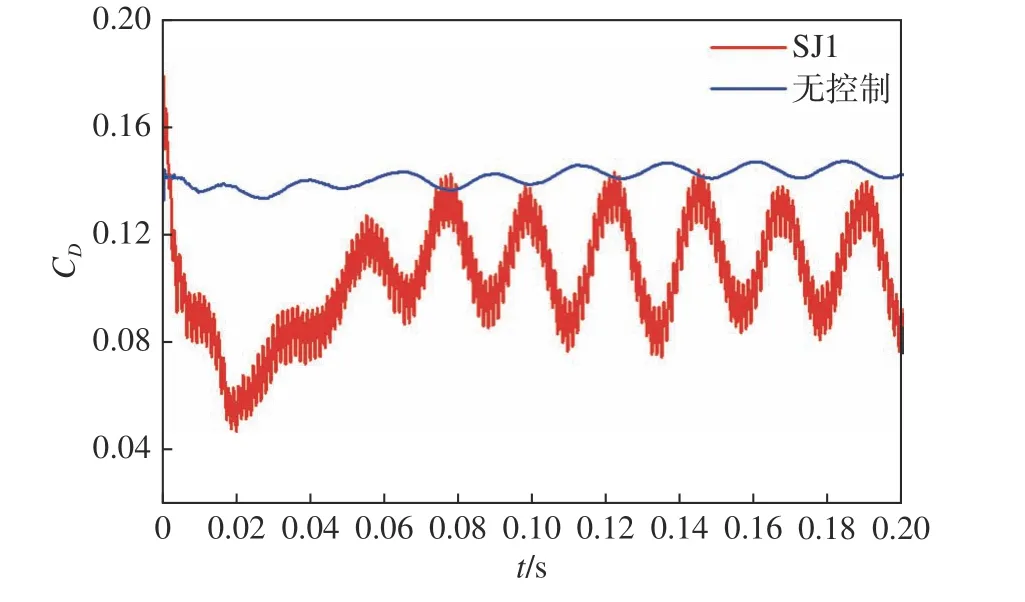
圖8 有無SJ1控制的偏轉襟翼CD隨時間的變化對比Fig. 8 Comparison of CD of deflection flaps with and without SJ1 control over time
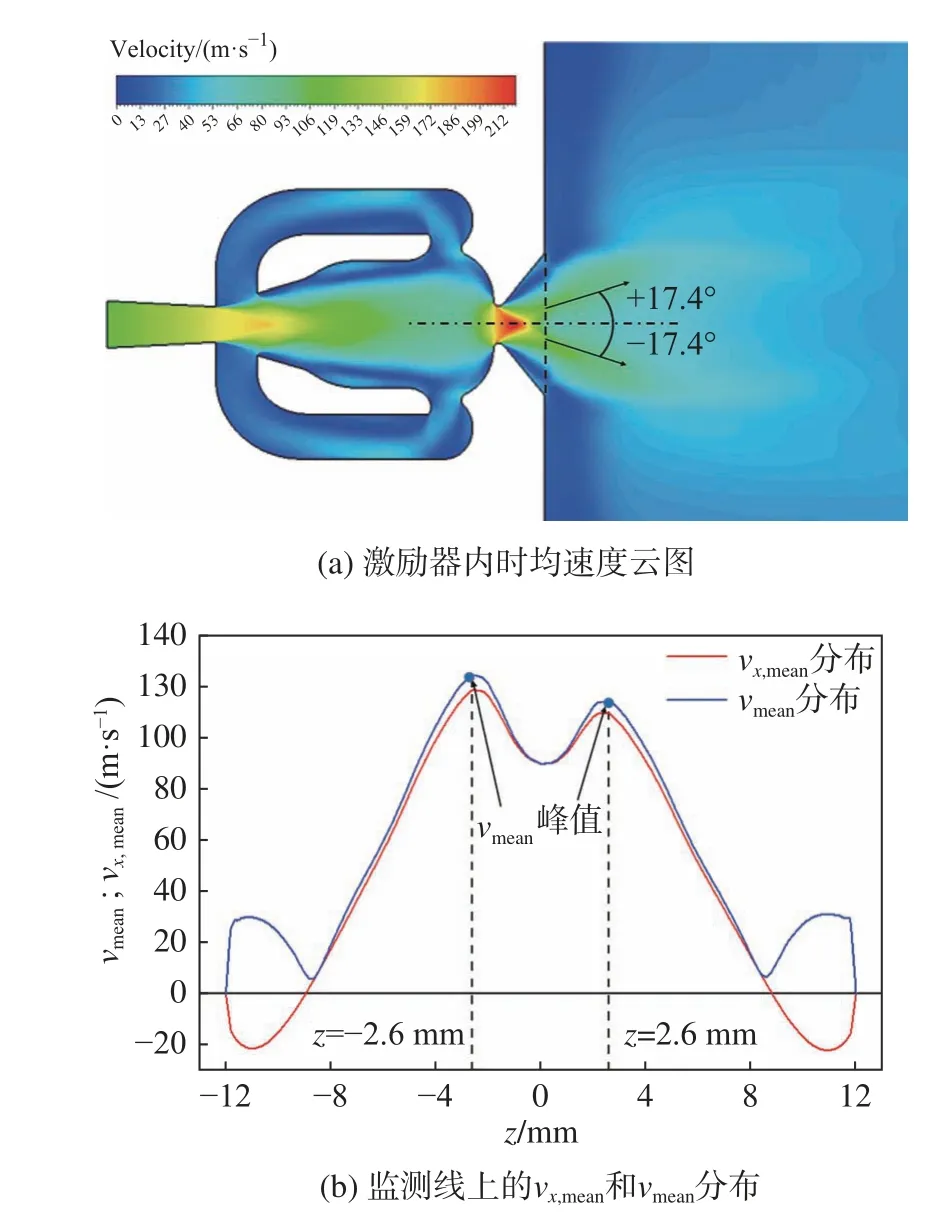
圖9 SJ1激勵器內時均流場Fig. 9 Time averaged flow field in SJ1 actuator
以偏轉襟翼阻力、流動附著狀況和表面壓力分布判斷控制效果。施加控制前后偏轉襟翼表面附近流線如圖10所示,由圖可知施加控制后分離區明顯減小。偏轉襟翼上的x向時均摩擦阻力系數Cf,x和時均表面壓力系數Cp如圖11所示,Cf,x為正表示流動附著,為負則表示流動分離;來流流經偏轉襟翼后會減速增壓,因此下游Cp越高則控制效果越好。由圖可知施加控制后偏轉襟翼上附著區面積較大、壓力恢復較明顯,表明控制效果較好。但應注意偏轉襟翼兩側的附著區可以延伸至襟翼尾緣,而中部的附著區僅延伸至襟翼中部,這表明中部控制效果差。接下來從動量傳遞和流動摻混兩方面分析造成該現象的原因。
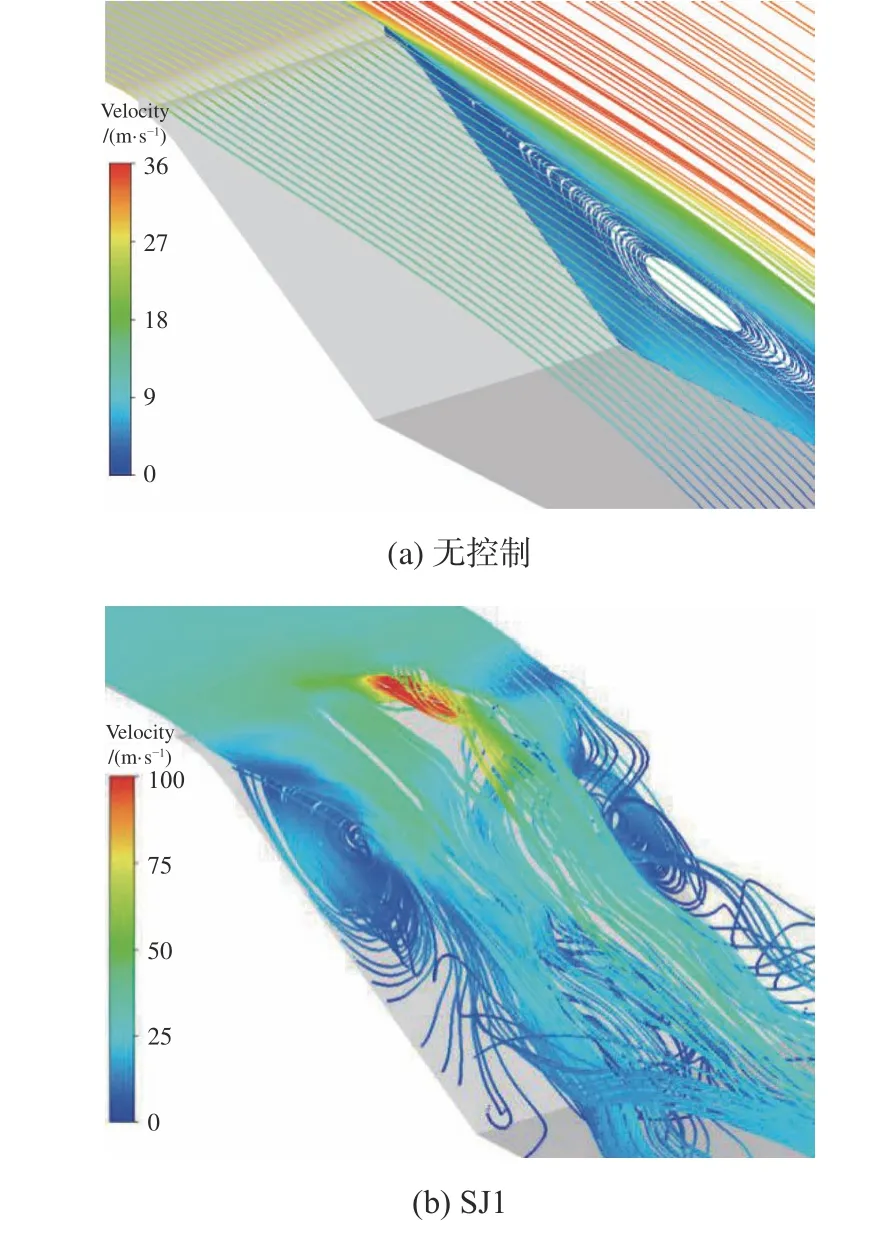
圖10 偏轉襟翼表面附近流線Fig. 10 Streamlines around the deflection flap
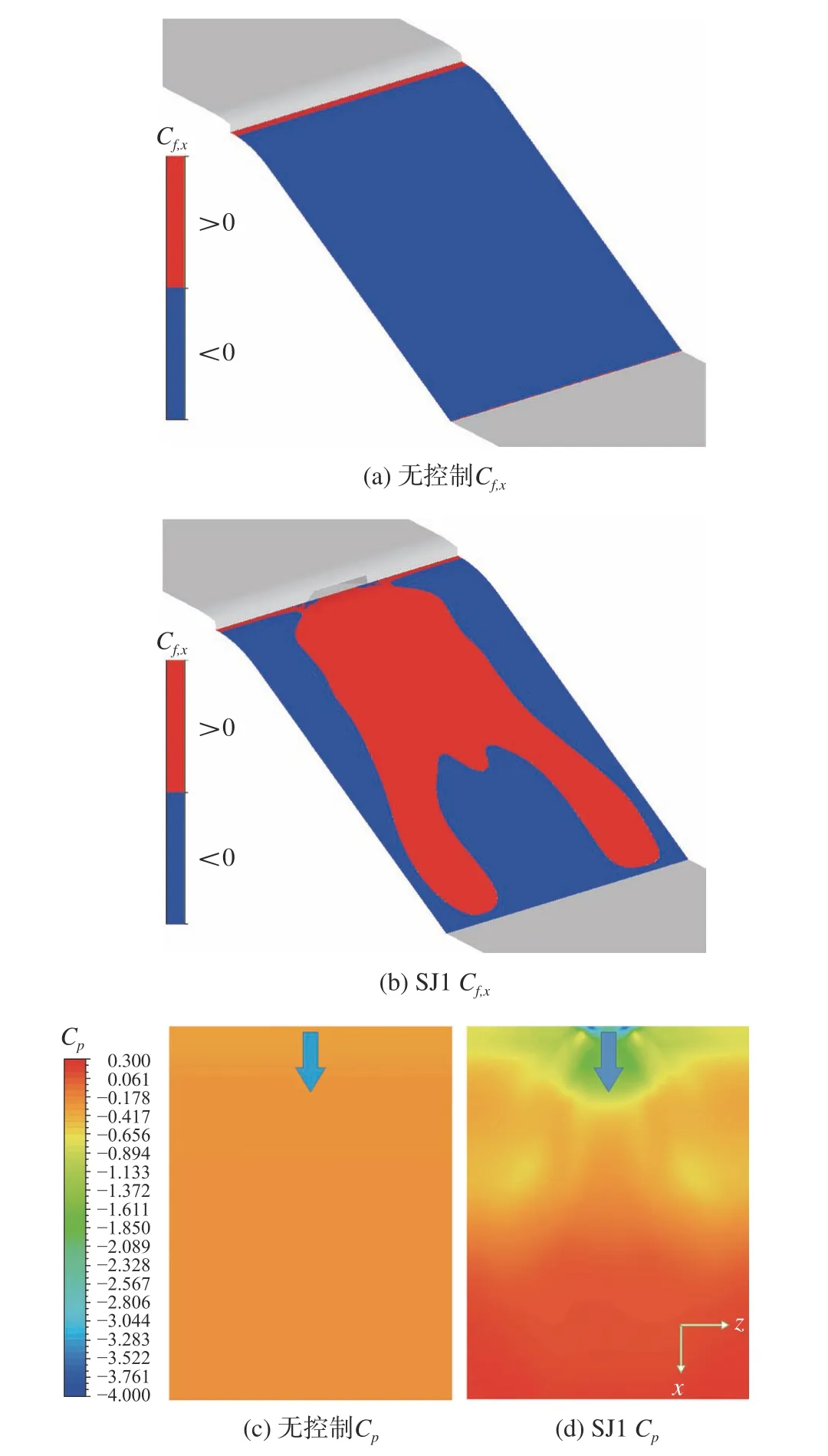
圖11 偏轉襟翼x向時均摩阻系數Cf,x和時均壓力系數CpFig. 11 Time averaged friction coefficient in the x direction and pressure coefficient of the deflection flap
從動量傳遞的角度分析,由圖9可知射流向兩側傳遞的動量較多,而向中部傳遞的動量較少,這導致中部控制效果差。為了分析射流向流場中傳遞動量不均勻的原因,圖12給出了一周期內監測線上vmax值隨其位置的變化,圖中兩點間對應的時間間隔Δt為6×10-5s。由圖可知:從z= 0 mm起,vmax點向z軸正向偏移(沿箭頭指向),經過5Δt到達最大偏移位置,后經1Δt回偏至z= 3 mm附近,并在z= 2.5 mm附近停滯16Δt,在此期間vmax值逐漸增大,因此射流在兩側停滯和停滯時流速增加是其向兩側傳遞動量較多的原因。
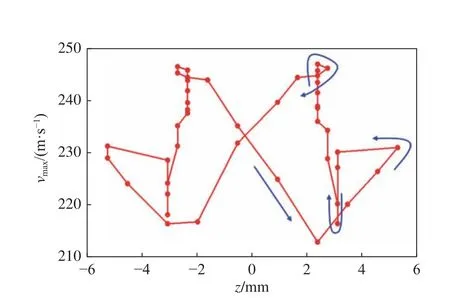
圖12 監測線上vmax值隨其位置的變化Fig. 12 Variation of vmax magnitude on the monitor line with its position
從流動摻混的角度分析,圖13給出了監測線上vmax點在由負向運動到正向最大偏移位置的過程中(t= 0~T/2,T= 1/f)對應的Q= 540等值面。由圖可知:在射流偏角較大時,射流與來流相互作用會誘導出較強的沿流向螺旋線形渦,這會促進射流與來流的摻混,且射流停滯會延長流向渦作用時間,使得射流動量更充分地傳遞至剪切層;而射流偏轉至中部時會誘導出較弱的反向渦對,且其作用時間短,故摻混效果相比于射流在大偏角時弱。
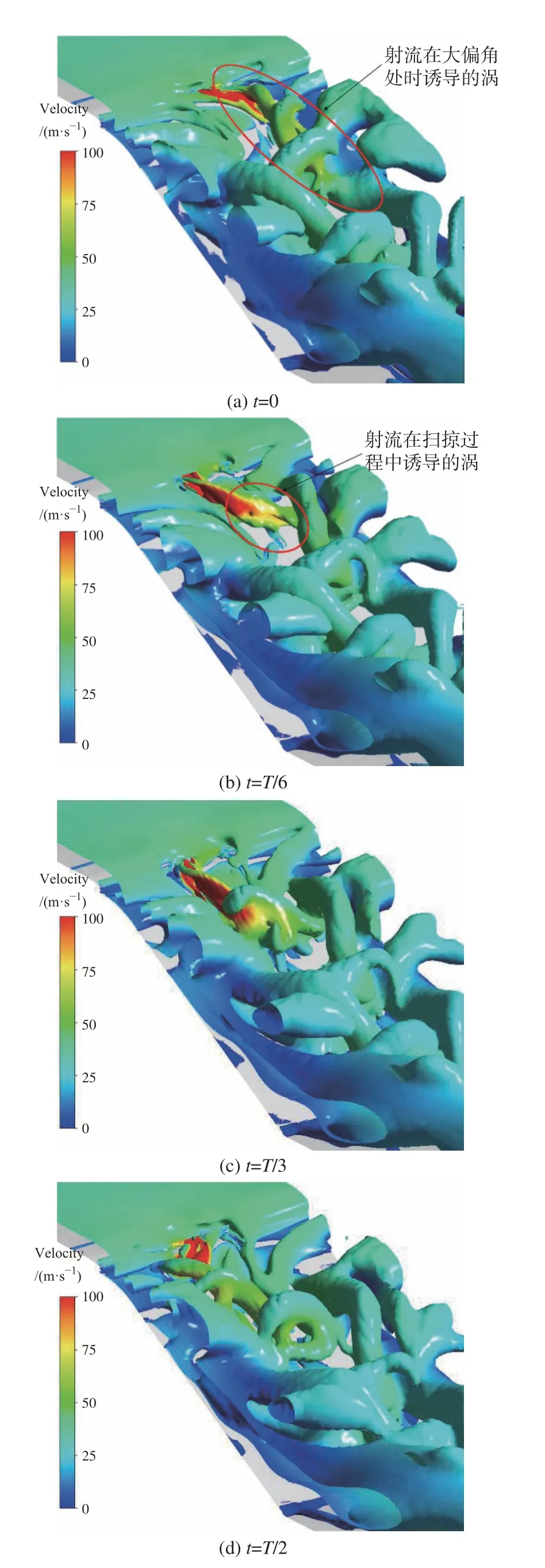
圖13 偏轉襟翼上Q = 540等值面Fig. 13 Vortical structures illustrated by Q = 540 around the deflection flap
由上述分析可知,施加控制后偏轉襟翼兩側控制效果好于中部。原因是射流在兩側停滯,停滯時射流流速逐漸升高,向兩側傳遞動量較多;而射流在兩側會誘導出有利于促進流動摻混的流向渦,射流停滯會延長流向渦的作用時間,使得該處動量傳遞充分。由于射流停滯導致了偏轉襟翼兩側與中部控制效果的差異,因此其可能是影響控制效果的關鍵因素。
接下來結合激勵器內瞬時流場分析射流停滯的原因,監測線上vmax在由z= 0 mm運動到正向最大偏移位置的過程中(t=T/4~T/2),對應的激勵器內瞬時流場如圖14所示。由圖可知在t=T/3~T/2之間,混合段內的分離渦在向下游運動時擠壓射流使之附著于收縮部分壁面,這會使射流以更大的偏角射出,但由于喉道限制了射流偏轉,擴張段內的射流偏角增加不多。為了便于說明喉道對射流偏轉的影響,假設射流寬度不變,則射流以θ角從喉道射出時允許其通過的寬度為htcosθ,可知θ越大則htcosθ越小,當htcosθ減小到射流寬度后射流偏轉會被限制,而混合段內射流仍會繼續偏移,直至其到達混合段上下壁面,從而表現為射流在該處停滯。盡管實際上射流流經小喉道時其寬度會有所減小,偏角也隨之增大,但上述分析可以定性說明ht較小會限制射流偏角增大,從而延長射流在大偏角處的停滯時間,使得其向兩側傳遞的動量較多。
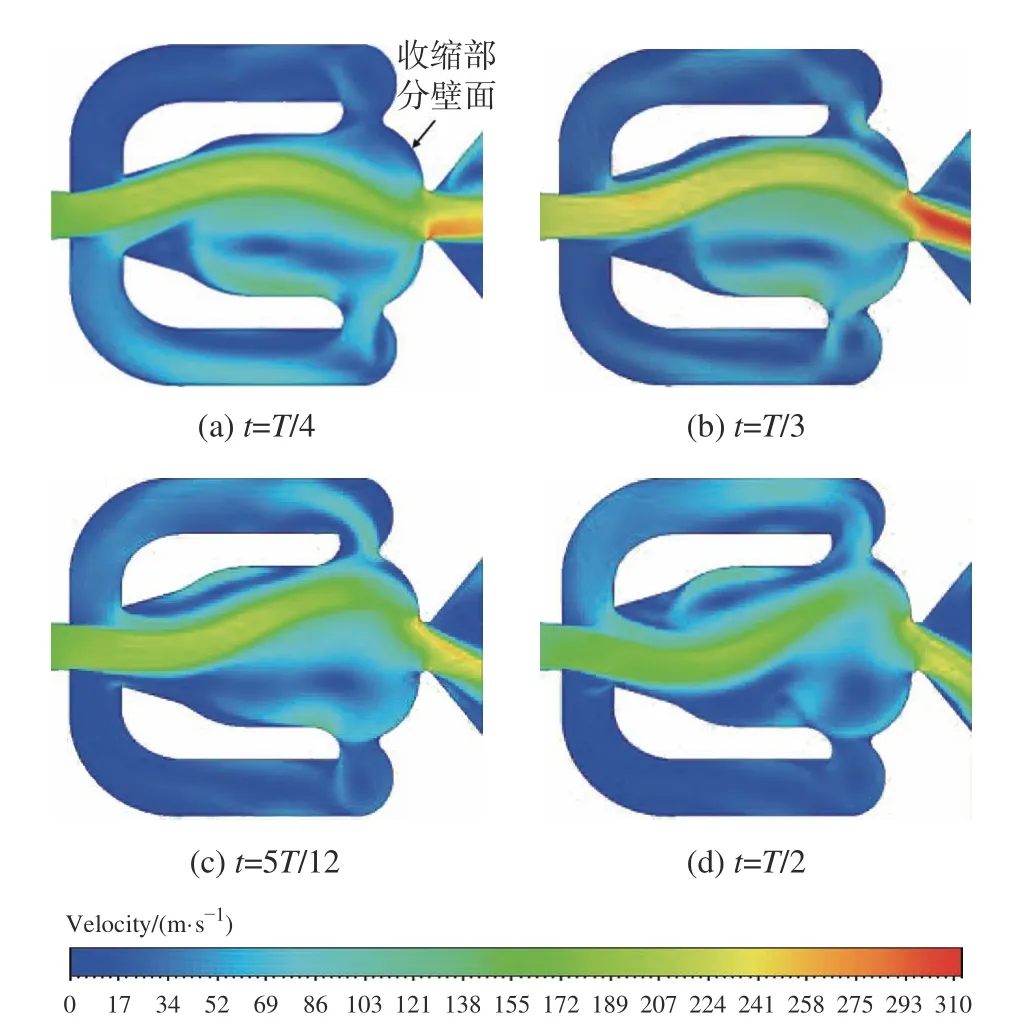
圖14 激勵器內瞬時速度云圖Fig. 14 Instantaneous velocity contours inside the actuator
2.2 激勵器擴張段大小的影響
采用SJ2與SJ2-1施加控制后,偏轉襟翼上的Cf,x和Cp分布如圖15所示,CD,mean分別為0.1153和0.1384,可知采用SJ2時偏轉襟翼附著區面積更大、壓力恢復更明顯、阻力更小,控制效果更好。
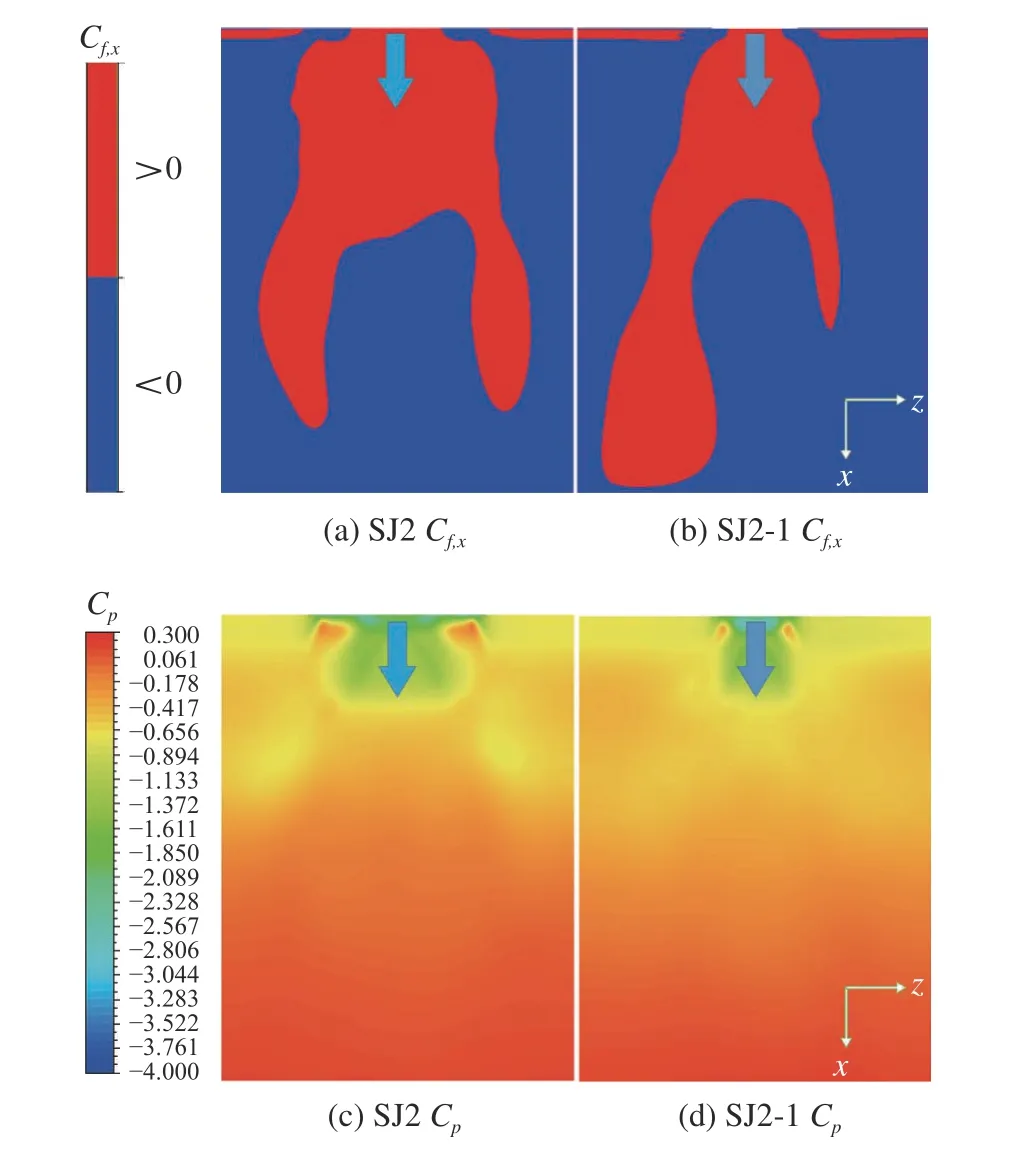
圖15 偏轉襟翼上Cf,x和Cp分布Fig. 15 Cf,x and Cp of the deflection flap
由圖16可知SJ2中射流zj更大,但SJ2-1監測線上的vmean分布受喉道附近三角形高速區域的影響較大,無法準確測得θj,因此通過比較SJ2擴張段截短位置(圖16(a))和SJ2-1監測線上的時均回流區(vx,mean為負的區域)長度來比較兩者的射流θj大小。由圖16(b)可知兩者時均回流區長度基本一致,分別為5.1 mm和4.6 mm,這表明兩者θj基本一致,因此增大擴張段對射流θj的影響較小。一周期內兩者監測線上vmax的時均值vmax,mean分別為204 m/s和224 m/s,表明增大擴張段會增大激勵器內流損失。
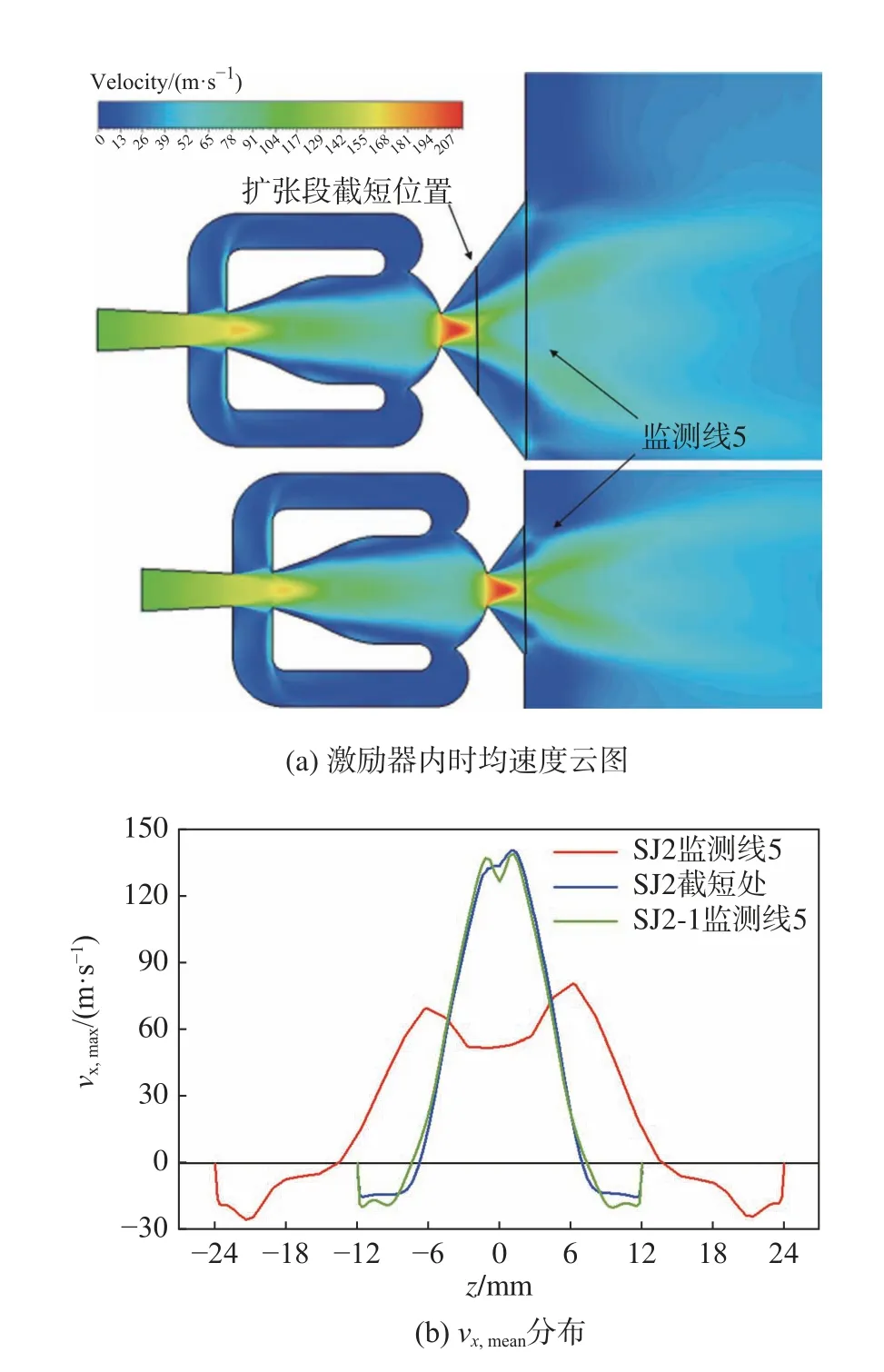
圖16 激勵器內時均流場Fig. 16 Time averaged flow field inside the actuator
由上述分析可知,增大擴張段會增大射流掃掠范圍(增大zj),從而改善控制效果,因此射流掃掠范圍可能是影響控制效果的關鍵因素。但增大擴張段也會增大內流損失,內流損失也是影響因素之一,各因素的影響大小將在第4章進行定量分析。
3 脈沖式與掃掠式振蕩射流控制特點對比
PJ為脈沖式激勵器,PJ-1為PJ移除尖劈后的掃掠式激勵器,通過分析兩者施加控制后的流場,可以得到施加脈沖式和掃掠式振蕩射流后的流場特點和兩種射流形式的控制效果,找到適用于偏轉襟翼分離控制的射流形式及原因,并以控制效果更好的掃掠式激勵器PJ-1為研究對象,分析改善其射流停滯特性的可行性。
3.1 脈沖式與掃掠式振蕩射流流場特點
采用PJ和PJ-1施加控制后,偏轉襟翼上的Cf,x和Cp分布如圖17所示,相應的CD,mean分別為0.1338和0.0590,可知采用PJ-1時偏轉襟翼附著區面積更大、壓力恢復更明顯、阻力更小,控制效果更好,表明掃掠式振蕩射流更適用于該情形。
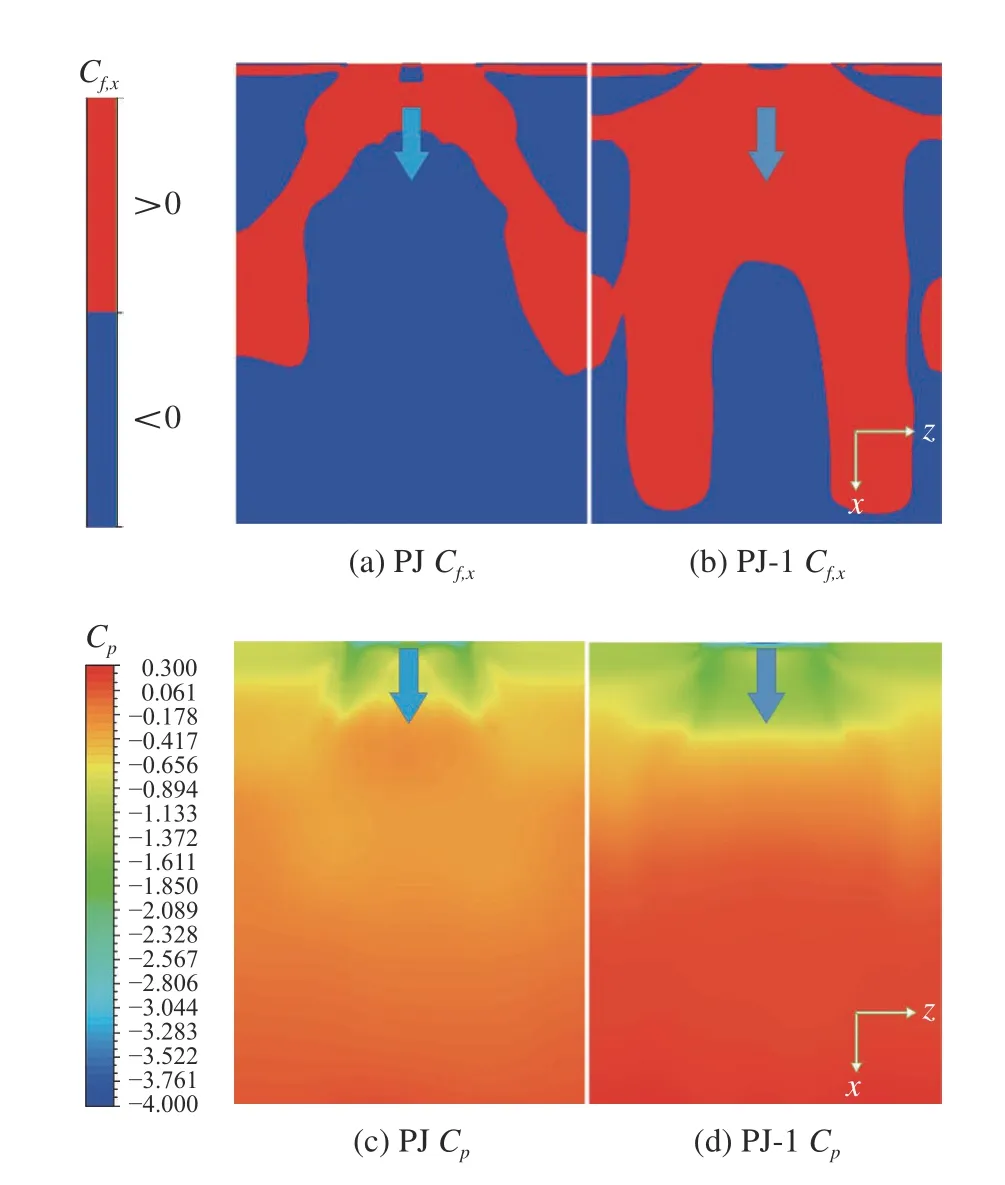
圖17 偏轉襟翼上Cf,x和Cp分布Fig. 17 Cf,x and Cp of the deflection flap
圖18表明在尖劈之后存在低速區,這是由于尖劈阻擋了射流向其后方傳遞動量,且射流會沿尖劈壁面以一定偏角出射,導致尖劈后方出現很大的分離區。圖17(a)表明尖劈后方仍有流動附著,這是由于射流附著于尖劈壁面時(對應圖18(b)中z= ±2.5 mm附近的vmean峰值),會在流場中誘導出一個渦環,如圖19所示,其會將部分射流動量傳遞至尖劈后方。

圖18 激勵器內時均流場Fig. 18 Time averaged flow field inside the actuator
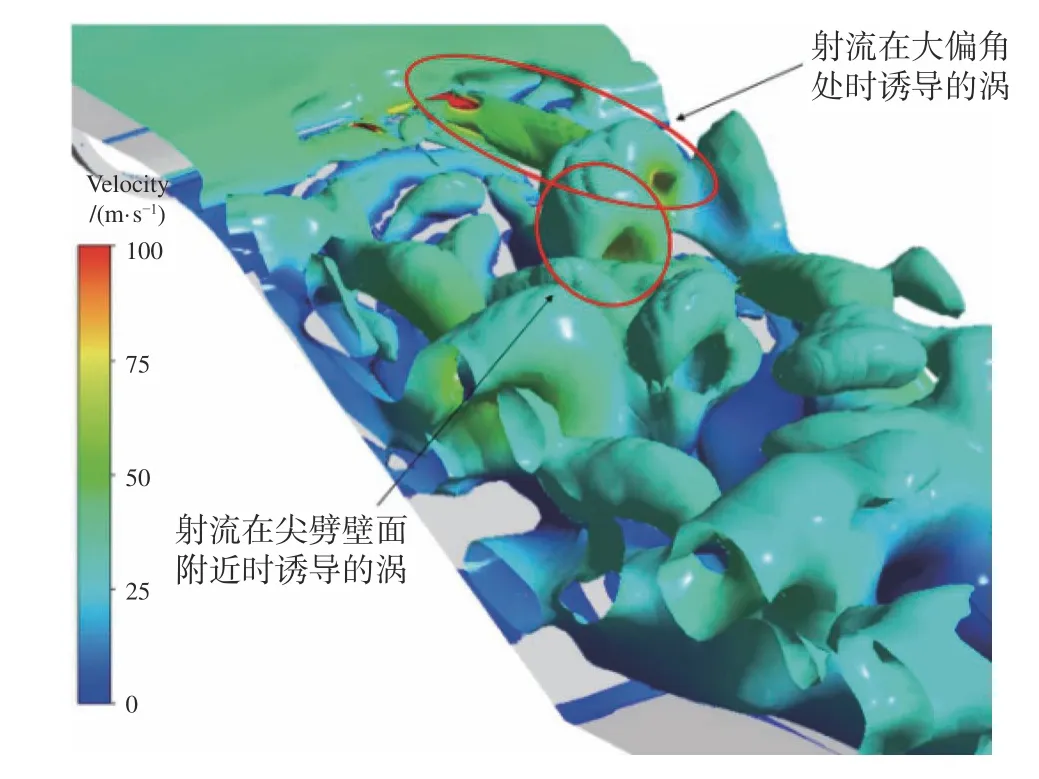
圖19 采用PJ時Q = 540等值面Fig. 19 Vortical structures illustrated by Q = 540 with PJ
而PJ-1中沒有尖劈阻礙射流掃掠,其zj和θj分別達到±12 mm和±31°。監測線上vmax點在由負向運動到正向最大偏移位置的過程中(t= 0~T/2)對應的Q= 540等值面如圖20所示,射流在大偏角處誘導出了螺旋線形渦,并在掃掠過程中誘導出了反向渦對。相比于SJ1中的射流,PJ-1中射流誘導出的反向渦對更加明顯,這是由于SJ1與PJ-1中射流的f很接近,分別為371 Hz和362 Hz,但后者的zj更大,這意味著其偏移速度更快,誘導出的渦對渦強更強。
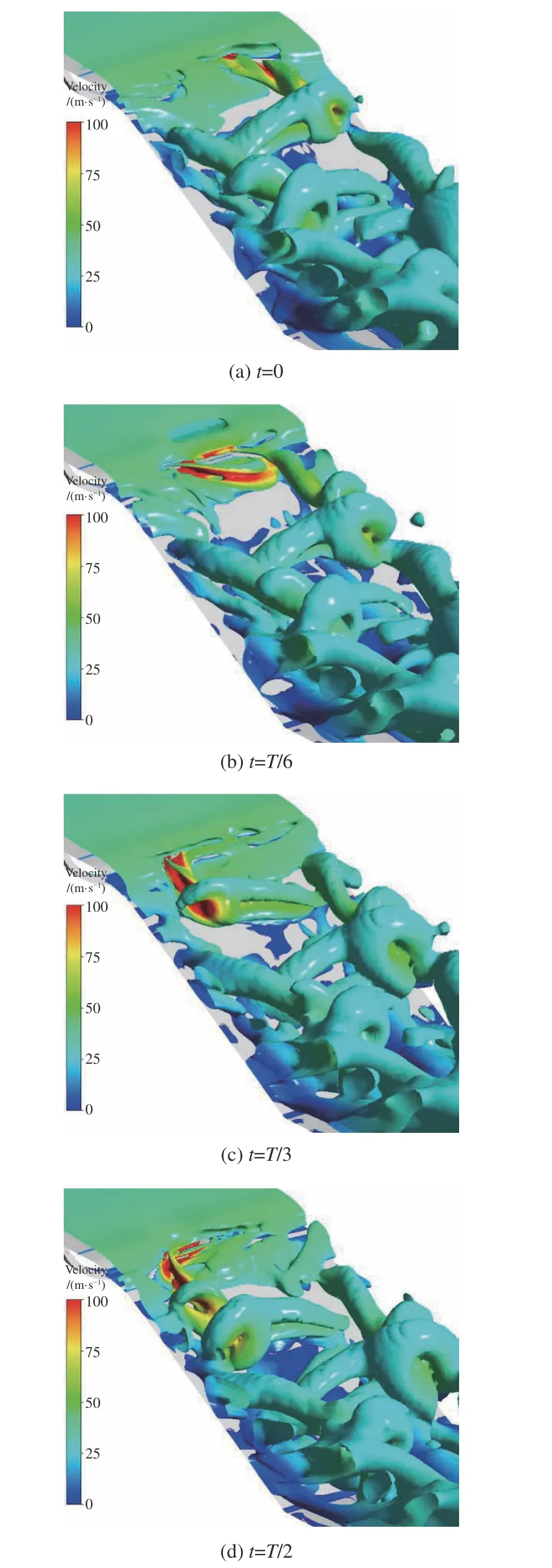
圖20 采用PJ-1時Q = 540等值面Fig. 20 Vortical structures illustrated by Q = 540 with PJ-1
由上述分析可知,脈沖式振蕩射流難以將射流動量傳遞到更廣闊的區域,導致其控制效果不如掃掠式振蕩射流,這再次表明射流掃掠范圍可能是影響控制效果的關鍵因素。值得注意的是,本文研究對象是存在大面積分離的偏轉襟翼,而脈沖式振蕩射流僅向兩個特定方向傳遞動量,其更適用于特定方向上的分離控制。
3.2 擴張混合段激勵器射流停滯特性
上述研究表明采用PJ-1時CD,mean最小,但PJ-1中射流向流場傳遞動量并不均勻,需改善其停滯特性。而第2節僅研究了擴張-收縮混合段激勵器的射流停滯特性,因此本節還需對該種擴張混合段激勵器進行研究。
一周期內監測線上vmax點的速度方向角隨其位置的變化如圖21所示(沿箭頭指向看圖),以z= 0 mm為起點,vmax點首先向z軸正方向偏移,并在最大偏移位置附近停滯,而后射流開始回偏,在回偏過程中vmax點的速度方向角先增大后減小,且其在速度方向角最大時停滯時間短。由于射流停滯會導致其向流場中傳遞動量不均勻,在速度方向角最大時停滯時間短會減少射流掃掠范圍,因此需研究造成該現象的原因。

圖21 vmax點速度方向角隨其位置的變化Fig. 21 Variation of the velocity direction angle of vmax with its position
激勵器內瞬時流場如圖22所示。由圖可知:vmax點達到最大偏移位置時射流附著于擴張段壁面,阻礙了混合段內分離渦的脫落,延長了射流在該處的停滯時間;而隨著分離渦向下游運動,射流會逐漸脫離壁面并繼續偏轉,因此射流vmax點會內移,其速度方向角也會增加,且在分離渦脫落前達到最大。由于此時射流已基本脫離壁面,分離渦會迅速脫落,故射流也會迅速回偏。
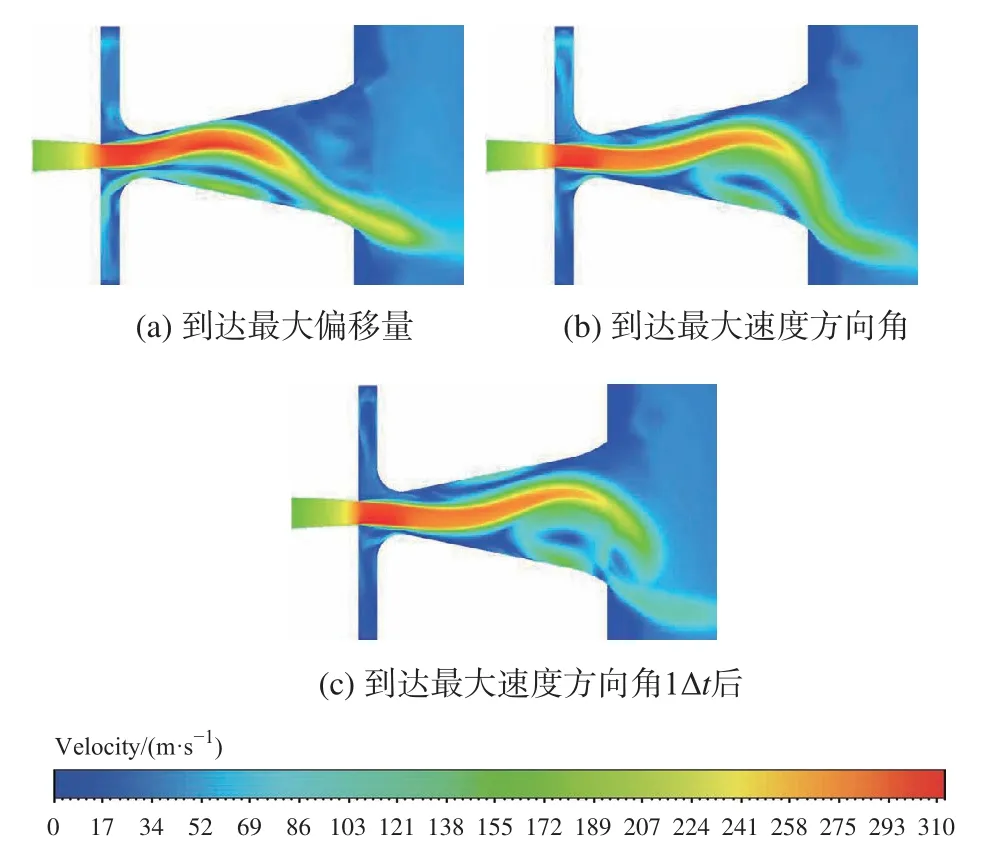
圖22 擴張混合段激勵器內瞬時速度云圖Fig. 22 Instantaneous velocity contours inside the actuator
因此PJ-1中射流在兩側停滯的原因是射流附著于擴張段,阻礙了混合段內分離渦的脫落;vmax點速度方向角達到最大時,射流停滯時間短的原因是射流脫離壁面后分離渦迅速脫落,射流也隨即回偏。
對于無擴張段的情形(可視為θm=θe),文獻[26]已經進行了研究,其射流也會附著于出口附近壁面,從而發生停滯,分離渦脫落后射流也會迅速回偏。由于擴張混合段激勵器中射流總會附著于出口附近壁面,因此難以通過改變激勵器幾何參數來調節其射流停滯特性,而擴張-收縮混合段激勵器中射流的停滯是由于喉道過小阻礙了射流偏轉,有望通過增大喉道高度來縮短停滯時間,因此后續將研究擴張-收縮混合段激勵器。
4 影響控制效果的關鍵因素
由上述分析可知,射流停滯特性和掃掠范圍對控制效果影響較大,但影響控制效果的因素眾多,為了定量分析各因素的影響大小,通過求解能反映各因素特點的流場參數與CD,mean的相關系數,由此總結出影響控制效果的關鍵因素。
采用上述激勵器施加控制后的流場參數如表3所示,其中vmax,mean與激勵器內流損失相關,zj和θj代表了射流掃掠范圍,f與流動非定常性相關。為方便分析,需補全SJ2-1中的射流θj(僅分析掃掠式振蕩射流),由2.2節可知擴張段對θj的影響較小,故取其θj為±15°,則可由式(1)計算vmax,mean、zj、θj、f和CD,mean的相關系數r,式中Cov(X,Y)為X與Y的協方差,Var[X]為X的方差,Var[Y]為Y的方差,求得r分別為-0.41、-0.96、-0.93、-0.54,可知zj和θj與CD,mean的相關性最強,這表明射流掃掠范圍對控制效果的影響最大,激勵器內流損失和射流振蕩頻率的影響較小。上述激勵器中射流振蕩頻率均明顯高于偏轉襟翼上分離渦脫落的頻率(45 Hz),其縮減頻率f+均大于6,可以不考慮頻率的影響。
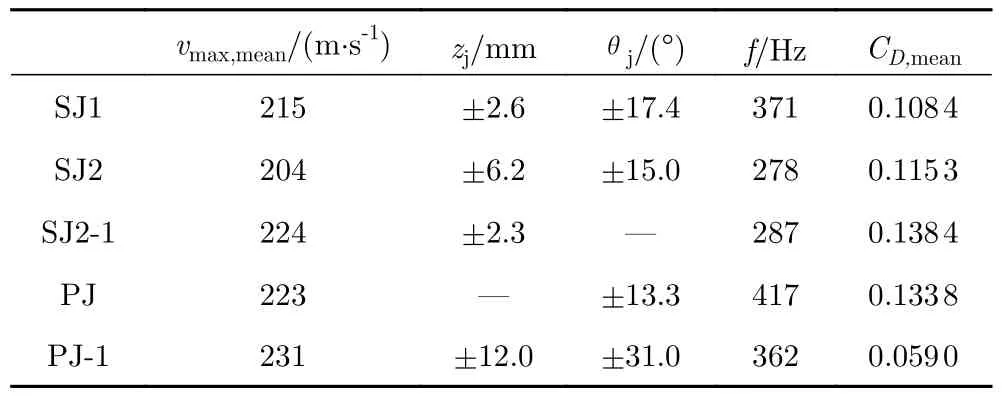
表3 施加控制后的流場參數Table 3 Flow field parameters after control
由于上述激勵器中射流均在兩側停滯,無法比較射流停滯特性對控制效果的影響,但射流在兩側停滯會導致偏轉襟翼中部控制效果差,從而降低控制效率,因此應縮短其停滯時間,改善射流向流場中傳遞動量的均勻程度(停滯時間和摻混程度難以準確定義并測量,且其最終體現為流場獲得的動量大小)。綜上所述,影響控制效果的關鍵因素是射流掃掠范圍大小和向流場中傳遞動量的均勻程度,射流掃掠范圍越大,傳遞動量越均勻,控制效果越好。
5 結論
本文以找出影響振蕩射流分離控制效果的關鍵因素為目標,以偏轉襟翼為控制對象,分析了采用典型激勵器施加控制后的偏轉襟翼流場,并對比了掃掠式和脈沖式振蕩射流的控制特點,總結出影響控制效果的關鍵因素。得出如下結論:
1) 影響分離控制的關鍵因素是射流向流場中傳遞動量的均勻程度和掃掠范圍,射流向流場中傳遞動量越均勻,掃掠范圍越大,控制效果越好;
2) 激勵器喉道高度主要影響射流掃掠均勻程度,其過小會導致射流在兩側停滯,使得射流向中部傳遞動量較少,導致偏轉襟翼中部分離控制效果較差;
3) 擴張段主要影響射流掃掠范圍,增大擴張段可以增大射流偏移量,但擴張段過大時射流會附著于出口部分壁面,使得射流在兩側停滯時間長,導致其向流場中傳遞動量不均勻;
4) 由于脈沖式激勵器內的尖劈會阻擋射流向尖劈后方傳遞動量,故其掃掠范圍小于掃掠式振蕩射流,導致偏轉襟翼減阻量較小。
后續將圍繞影響振蕩射流分離控制效果的關鍵因素開展激勵器設計,分析各幾何參數對控制效果的影響并進行優選,設計出有利于分離控制的激勵器。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
中老年保健(2021年12期)2021-11-30 02:58:01
當代陜西(2021年2期)2021-03-29 07:41:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
媽媽寶寶(2017年3期)2017-02-21 01:22:28
Coco薇(2016年8期)2016-10-09 02:11:50
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
中國醫藥科學(2015年19期)2015-02-27 12:33:11