基于粒子圖像分割的混合PIV-PTV算法
2024-03-18 07:39:04張清福申俊琦王宏偉李曉輝王晉軍
空氣動力學學報 2024年2期
關(guān)鍵詞:區(qū)域
李 拓,張清福,潘 翀,2,陳 爽,申俊琦,王宏偉,李曉輝,黃 湛,王晉軍
(1. 北京航空航天大學 流體力學教育部重點實驗室,北京 100191;2. 北京航空航天大學寧波創(chuàng)新研究院 先進飛行器與空天動力創(chuàng)新研究中心, 寧波 315800;3. 中國空氣動力研究與發(fā)展中心 設(shè)備設(shè)計與測試技術(shù)研究所, 綿陽 621000;4. 中國航天空氣動力技術(shù)研究院, 北京 100074)
0 引言
粒子圖像測速(particle image velocimetry, PIV)和粒子追蹤測速(particle tracking velocimetry,PTV)等基于數(shù)字圖像處理的速度場測量技術(shù)被廣泛應(yīng)用于空氣動力學測試領(lǐng)域[1],是科研工作者探索流體運動規(guī)律的有效工具[2]。
PIV技術(shù)[3]的原理是向流動中添加示蹤粒子,示蹤粒子隨流體一同運動,通過分析相機曝光得到的粒子圖像上局部光流信息(一般由查詢窗口內(nèi)的一組示蹤粒子提供)隨時間的變化得到當?shù)氐乃俣刃畔ⅰTV技術(shù)通過追蹤每個示蹤粒子在雙幀曝光圖像中的位置變化實現(xiàn)速度場的測量。不同的測速原理使得兩種方法適用于不同的場景:PIV技術(shù)要求每個查詢區(qū)至少有三個及以上粒子;而PTV技術(shù)則要求測量區(qū)域中示蹤粒子稀疏,易于識別和匹配。
PIV能夠適用于示蹤粒子濃度較高的場景,但需對查詢窗口內(nèi)的光流信息進行追蹤或匹配,導致其空間分辨率受限;而PTV能夠追蹤單個粒子的跨幀位移,但難以處理示蹤粒子間距小、跨幀位移大的場景。近年來,PIV和PTV技術(shù)手段迅猛發(fā)展[4-11],極大地提高了測量性能,但眾多學者仍希望能通過混合使用PIV和PTV以更進一步地提高測量性能[12-16]。Cowen[13]開發(fā)了DPTV技術(shù), 通過使用PIV的估計值以限制在第二幅圖像中粒子的搜索窗口,使得PTV可以在較高的粒子密度下進行匹配。Kim等[14]將PIV結(jié)果用于確定PTV過程中的匹配參數(shù)和結(jié)果驗證,提高了粒子匹配效率。Benkovic等[15]將基于匹配概率的松弛算法集成到基于視覺的特征關(guān)聯(lián)概念中, 通過仿真證明了結(jié)合PIV預(yù)分析的混合方法有助于減少錯誤向量的數(shù)量。此外,Zhu等[16]對風沙兩相流中離散相顆粒和連續(xù)相示蹤粒子進行分相處理,并分別使用PIV和PTV技術(shù),實現(xiàn)了風沙兩相速度場的同步測量。這些混合算法有效地拓寬了粒子圖像測速能力,提高了測量的精度。
另外,在復(fù)雜流動中,示蹤粒子在流場空間難以均勻分布的問題十分常見。例如,在邊界層流動測量實驗中,示蹤粒子難以進入邊界層內(nèi)的高剪切區(qū),致使示蹤粒子在邊界層內(nèi)的分布過于稀疏,無法進行有效的互相關(guān)計算,導致PIV得到的速度場在近壁區(qū)域存在顯著誤差。針對這一問題,通常的解決手段是提高示蹤粒子的整體濃度。然而,該方法對流動分離區(qū)、旋渦內(nèi)部和激波后方流區(qū)的示蹤粒子濃度改善效果有限。Brooks等[17]通過壁面粒子注射裝置直接從壁面處將示蹤粒子注入到邊界層內(nèi)的近壁流區(qū),提高近壁區(qū)域的粒子密度。這種方法在邊界層測量中取得了一定的效果,但不具有泛化能力。
針對上述問題,本文提出了一種基于粒子圖像分割的混合PIV-PTV算法。該算法使用維諾多邊形圖像分割方法,對粒子圖像按粒子分布濃度劃分出粒子稀疏區(qū)和稠密區(qū),對稀疏區(qū)和稠密區(qū)分別調(diào)用PTV和PIV算法,實現(xiàn)示蹤粒子分布不均情況下的高精度流場測量。
1 算法介紹
1.1 算法流程
本文所發(fā)展的基于粒子圖像分割的混合PIVPTV算法主要分為以下4個步驟:示蹤粒子識別、應(yīng)用維諾多邊形計算示蹤粒子密度、設(shè)定閾值并使用支持向量機(support vector machine, SVM)進行粒子圖像劃分、分別調(diào)用PIV和PTV計算速度場。其算法概述如圖1所示,本節(jié)將對實現(xiàn)該算法的幾個關(guān)鍵步驟進行介紹。
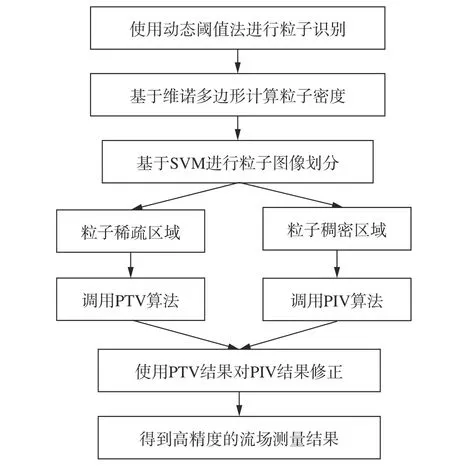
圖1 混合PIV-PTV算法技術(shù)路線Fig. 1 Hybrid PIV-PTV algorithm flow chart
1.2 粒子識別
Ohmi等[18]首先提出了基于動態(tài)閾值的示蹤粒子識別方法。根據(jù)粒子圖像上每個粒子的平均亮度水平自適應(yīng)地調(diào)整閾值,消除了傳統(tǒng)方法基于單一或多個閾值解帶來的人工確定閾值的不確定性。Mikheev等[19]對此方法進行了改進,其基本思想是將每個粒子圖像的分割閾值設(shè)置為峰值的比例值,而不是原始算法中的平均值。近幾年基于機器學習等方法的粒子識別技術(shù)也得到迅猛發(fā)展[20],并展現(xiàn)出了優(yōu)異的性能。綜合考量現(xiàn)有方法的易用性和魯棒性,本文選用經(jīng)典的改進動態(tài)閾值法[19],其總體方案如圖2所示。
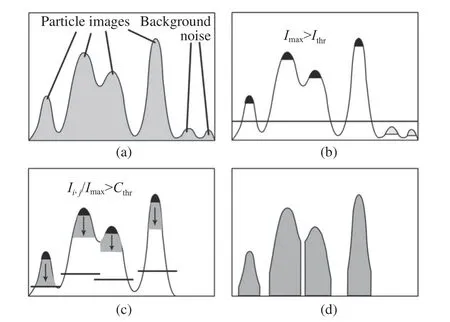
圖2 改進動態(tài)閾值法實現(xiàn)流程[19]Fig. 2 Process of improved dynamic threshold method[19]
首先使用一定的閾值進行濾波,以排除噪聲背景的干擾;尋找濾波后粒子圖像的所有局部極大值,即亮度峰值點,如圖2(b)。然后將每個峰值像素點擴展一個像素大小的邊界,并檢查每個新像素。邊界像素強度與峰值像素強度之比應(yīng)大于預(yù)設(shè)的對比度閾值,即:
式中:Ii,j為新添加邊界像素的灰度值,Imax為峰值點的灰度值,Cthr為對比度閾值。如果滿足此條件,則認為該像素與峰值像素點屬于同一個粒子;否則,則認為該像素不屬于該粒子。這個擴展過程持續(xù)向外進行,直到不存在滿足要求的像素點。擴展過程中若遇到灰度值反常增大,則認為出現(xiàn)拐點,沿此方向的擴展停止。這一粒子識別算法使用了更合理的閾值準則,并能通過拐點檢測在擴展過程中自動分離出重疊的粒子,具有很高的魯棒性。
1.3 粒子濃度定義
由粒子圖像測速原理可知,示蹤粒子的濃度是決定PIV-PTV測速精度的重要因素。本文使用一種基于維諾多邊形劃分的粒子局部濃度評估準則。維諾分析廣泛應(yīng)用于氣象學、細胞學和建筑結(jié)構(gòu)領(lǐng)域,是一種特殊的空間劃分方法。Monchaux等[21]首先將維諾分析引入到顆粒湍流領(lǐng)域,其后得到廣泛應(yīng)用[22-25]。對于二維平面而言,維諾劃分可將包含N個點的平面唯一劃分成N個維諾多邊形,每個多邊形包含且僅包含一個點。對于某一特定的粒子空間分布,維諾劃分具有客觀性和唯一性。基于這一特性,可以用維諾單元面積的倒數(shù)衡量局部粒子濃度。
維諾多邊形生成流程如圖3所示。通過粒子識別得到示蹤粒子的中心點坐標,對點集生成Delaunay三角形網(wǎng),Delaunay三角形的外接圓圓心是與三角形相關(guān)的維諾多邊形的一個頂點,連接各頂點即可得到維諾圖。
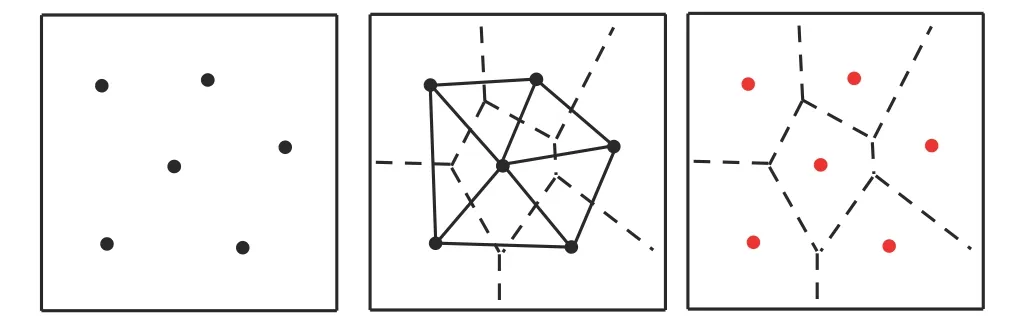
圖3 維諾多邊形生成流程Fig. 3 Voronoi polygon generation process
用包含單個示蹤粒子的維諾多邊形面積的倒數(shù)來表征當?shù)氐牧W訚舛龋Q為DBV(density based on voronoi)密度, 其定義為:
其中,S(pi)為第i個維諾多邊形的面積,單位為pixel2。可以看到,DBV密度度量與PPP(particles per pixel)密度度量本質(zhì)相同。基于每個粒子當?shù)氐腄BV密度和設(shè)定的閾值,可對每個粒子當?shù)貪舛冗M行稀疏或稠密的判定,進一步在粒子稀疏區(qū)域應(yīng)用PTV,在粒子稠密區(qū)域使用PIV。然而,對一個非常小的區(qū)域應(yīng)用PTV是沒有意義的。若將稀疏或稠密看作是每個粒子的特征,我們希望找到一條稀疏區(qū)和稠密區(qū)之間的光滑分割線。
1.4 基于高斯核的支持向量機
SVM是一種二分類算法,其基本模型是定義在特征空間上的間隔最大的線性分類器[26]。數(shù)據(jù)集根據(jù)自身特征可分為如圖4所示的線性可分、軟間隔可分和線性不可分3種情況[27]。
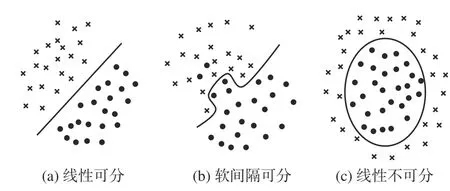
圖4 3種數(shù)據(jù)集類型示意圖Fig. 4 Three types of data diagram
以線性可分數(shù)據(jù)集為例,給定一些數(shù)據(jù)點,它們分別屬于兩個不同的類,用X表示數(shù)據(jù)點,用Y表示類別(Y取1或者-1,分別代表兩個不同的類),SVM學習目標便是要在空間中通過間隔最大化策略找到一個最優(yōu)的分離超平面(hyper plane)。
線性可分問題的處理手段已經(jīng)非常成熟,而對于非線性可分問題,可通過映射函數(shù)將原空間映射至線性可分新空間。映射函數(shù)由核函數(shù)確定。設(shè)H為特征空間,如果存在一個從X到H的映射函數(shù)?(x):X→H,使得對所有x1,x2∈X, 函數(shù)K(x1,x2)滿足條件K(x1,x2)=?(x1)·?(x2),則稱K(x1,x2)為核函數(shù)。一個常用的核函數(shù)是高斯核:
其中σ為高斯核函數(shù)的超參數(shù)。SVM中還存在另一個超參數(shù)C,C越大則代表模型對誤分類的懲罰越大。σ和懲罰參數(shù)C的設(shè)置會顯著影響劃分結(jié)果,本文選用的超參數(shù)基于網(wǎng)格法進行尋優(yōu)得到,分別為σ= 0.2,懲罰參數(shù)C= 0.0023。在實際應(yīng)用中需要根據(jù)具體情況調(diào)整,以使得最終的劃分符合預(yù)期。
2 粒子圖像分割
2.1 仿真粒子圖像合成
由于真實測速實驗中無法獲得先驗的參考速度場,在仿真測試階段,為了驗證算法的有效性,按照驗證PIV-PTV算法的一般慣例,使用人工生成仿真粒子圖像進行算法測試。相比以往的仿真粒子圖像[28-30],本文合成的粒子圖像具有顯著的粒子分布不均的特征。其合成步驟如下:
1)由二維高斯函數(shù)分布生成單個虛擬粒子的灰度分布,以制備粒子集備用。粒子灰度分布函數(shù)為:
其中,(x0,y0)為粒子的中心位置,粒子灰度等級的峰值強度為I0∈(150,250),粒子直徑dτ∈(2,5)。
2)在大小為512 pixel × 512 pixel的灰度矩陣(第一幀粒子圖像)中隨機劃定部分區(qū)域為稀疏區(qū)域,其余部分設(shè)定為稠密區(qū)域。
3)在稀疏區(qū)域和稠密區(qū)域分別以PPP <0.002的密度和PPP = 0.004的密度隨機放置粒子,并記錄粒子坐標,產(chǎn)生第一幀粒子圖像。
4)建立一個512 × 512的標簽矩陣,在該標簽矩陣中由步驟3定義的稠密區(qū)的標簽記為0、稀疏區(qū)的標簽記為1。
5)給定速度場,將步驟3中第一幀圖像中的每個粒子按照當?shù)厮俣冗M行跨幀移動,產(chǎn)生第二幀PIV圖像。
6)在產(chǎn)生的兩幀粒子圖像中添加噪聲,使得生成的粒子圖像更接近真實實驗圖像。最終輸出具有粒子稀疏分布的PIV圖像對和其對應(yīng)的標簽矩陣。
2.2 模型評價指標IoU
能否正確地劃分稀疏區(qū)和稠密區(qū),是決定混合PIV-PTV算法表現(xiàn)的關(guān)鍵,為此定義稀疏區(qū)交并比(intersection over union, IoU),用以定量評估SVM算法對稀疏區(qū)劃分的合理性。IoU系數(shù)是一種集合相似度度量函數(shù),通常用于計算兩個樣本的相似度,取值范圍在[0,1]。其公式如下:
A∩B是A和B之間的交集,A∪B是A和B的并集。在本文研究的問題中,A代表預(yù)設(shè)的稀疏區(qū)域,B表示SVM劃分出的稀疏區(qū)域。IoU數(shù)值越高表明A區(qū)域與B區(qū)域重合程度越高,SVM的劃分越準確。IoU具有尺度不變性和非負性等特性,在后文,我們將以IoU為評價指標,探究SVM劃分稀疏區(qū)的表現(xiàn)。
2.3 閾值的選擇
閾值的選擇會深刻影響劃分結(jié)果,應(yīng)充分考慮現(xiàn)有PIV和PTV算法的處理能力。若現(xiàn)有PIV算法要求計算區(qū)域密度至少為ρ1才能進行有效的互相關(guān)計算,而PTV方法能處理的最高密度為ρ2,則此時粒子濃度的閾值ρ的可選擇范圍應(yīng)為ρ1<ρ<ρ2。通常情況下,PIV算法要求在一個查詢區(qū)(32 pixel × 32 pixel)內(nèi)示蹤粒子數(shù)目應(yīng)至少大于3;反之,若粒子數(shù)目低于3,則認為使用PTV技術(shù)得到的速度場更有參考價值。基于此,本文工作中以DBV密度ρ= 0.003作為臨界閾值。
2.4 仿真PIV圖像分割
使用2.1節(jié)仿真粒子圖像合成方法生成的一幀粒子圖像如圖5所示,其速度呈蘭金渦結(jié)構(gòu)。蘭金渦的渦核區(qū)域為預(yù)設(shè)的粒子稀疏區(qū),其邊界如圖6中橙色線條所示。渦心位置為(295, 293),半徑a為92,速度分布在極坐標系下表示為:
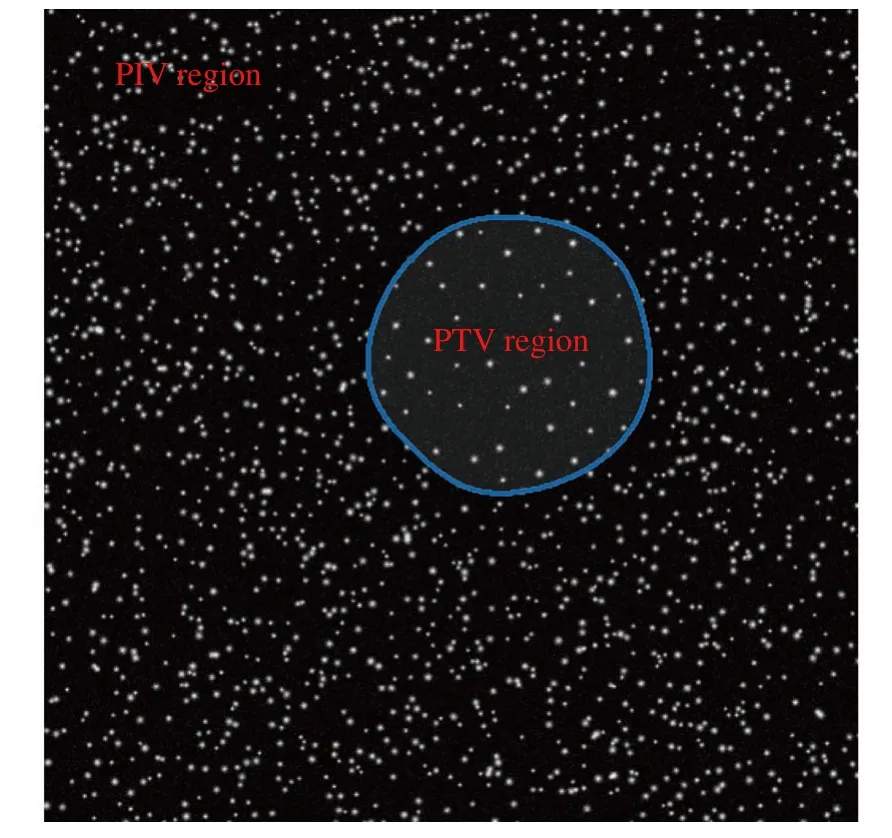
圖5 粒子圖像劃分Fig. 5 Illustration of particle image partitioning

圖6 粒子圖像的維諾圖Fig. 6 The Voronoi diagram of the tracer particles
其中,Γ為渦環(huán)量,r為任一點到渦心的距離。
對生成的仿真粒子圖像進行粒子識別,并生成維諾多邊形,如圖6所示。根據(jù)維諾多邊形計算DBV密度,并以密度ρ= 0.003為閾值對粒子進行分類。圖6中,紅色點代表該示蹤粒子的DBV密度小于設(shè)定閾值,即為當?shù)叵∈瑁缓谏c代表該示蹤粒子的DBV密度大于設(shè)定閾值,即為當?shù)爻砻堋?梢钥吹剑t色點主要分布在圖像中心區(qū)域,即中心區(qū)域存在一個較大的稀疏區(qū),在圖像邊緣處也分布著許多小的稀疏區(qū)。
基于高斯核函數(shù)的SVM尋找兩類粒子的光滑分割邊界。圖6中,紫色曲線為SVM劃分得到的稀疏區(qū)與稠密區(qū)邊界,橙色曲線為預(yù)先劃定的粒子稀疏區(qū)域的邊界。使用公式(5)計算預(yù)設(shè)稀疏區(qū)與預(yù)測稀疏區(qū)交并比IoU為0.96。基于SVM結(jié)果,得到適宜使用PIV和PTV的區(qū)域如圖5所示。
3 混合PIV-PTV測速仿真分析
基于圖5給出的劃分結(jié)果,對SVM劃分出的粒子稠密區(qū)使用基于多重迭代的光流PIV算法MILK[31]計算速度場,查詢區(qū)大小設(shè)為32 pixel × 32 pixel,步長設(shè)為1 pixel。應(yīng)用PIV算法計算速度場的結(jié)果如圖7中藍色箭頭所示。使用基于蟻群優(yōu)化的混合粒子匹配算法[32]進行PTV計算,該方法可以看作是傳統(tǒng)蟻群PTV算法的一個更新,其核心思想是通過改進的蟻群算法來尋求混合目標函數(shù)在全局中的最小化解,該方法在跨幀位移較大的場景下表現(xiàn)出良好的魯棒性[32]。對劃分出的稀疏區(qū)域應(yīng)用該粒子追蹤算法,其計算結(jié)果如圖7紅色箭頭所示。

圖7 混合PIV-PTV結(jié)果展示Fig. 7 Illustration of Hybrid PIV-PTV results
圖7中可以看到,PIV算法計算結(jié)果與理論速度總體分布具有一致性。圖8給出了PIV算法和PTV算法得到的跨幀位移切向分量的誤差沿徑向r的分布。可以看到,在蘭金渦渦核內(nèi)部,PIV結(jié)果的平均誤差在1 pixel附近,顯著高于PTV的誤差(約0.1~0.5 pixel)。在距渦心75~100 pixel半徑區(qū)域內(nèi),PIV算法誤差較大,究其原因有兩點:一是該區(qū)域示蹤粒子稀疏,難以進行有效的互相關(guān)計算;二是因蘭金渦的存在,該區(qū)域具有速度梯度較大的剪切流動,平均效應(yīng)的存在導致PIV計算產(chǎn)生較大誤差。而PTV方法適用于粒子稀疏區(qū)域,且對速度梯度不敏感,故表現(xiàn)出較低的計算誤差。由此可見,分區(qū)域分別應(yīng)用PIV、PTV進行速度場計算是必要的。
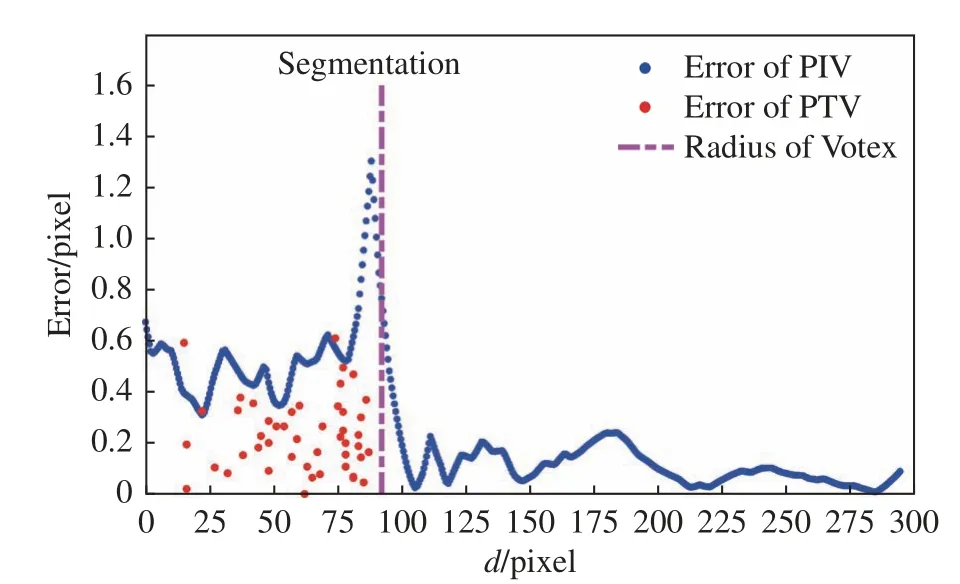
圖8 PIV-PTV誤差分布Fig. 8 Error distribution of PIV-PTV
4 混合PIV-PTV測速應(yīng)用實例
在高超聲速平板邊界層流動中,強剪切流使得示蹤粒子難以進入邊界層近壁區(qū)[33],導致PIV計算速度存在偏差。在本節(jié)中,混合PIV-PTV測速方法被應(yīng)用于來流馬赫數(shù)Ma= 6的高超聲速平板邊界層速度測量中,實驗在航天空氣動力技術(shù)研究院的FD-03高速風洞中進行,實驗示意圖見圖9。如圖9所示,模型主要由玻璃平板和轉(zhuǎn)捩帶組成。其中,玻璃平板長度240 mm,平板前緣距轉(zhuǎn)捩帶10 mm、距模型最前緣60 mm;采用Nd:YAG脈沖式雙曝光激光器,該激光器輸出能量達600 mJ;使用跨幀CCD相機進行流場拍攝,相機分辨率為2048 pixel ×2048 pixel。實驗參數(shù)如表1所示。

表1 實驗參數(shù)與實驗工況Table 1 Experimental conditions
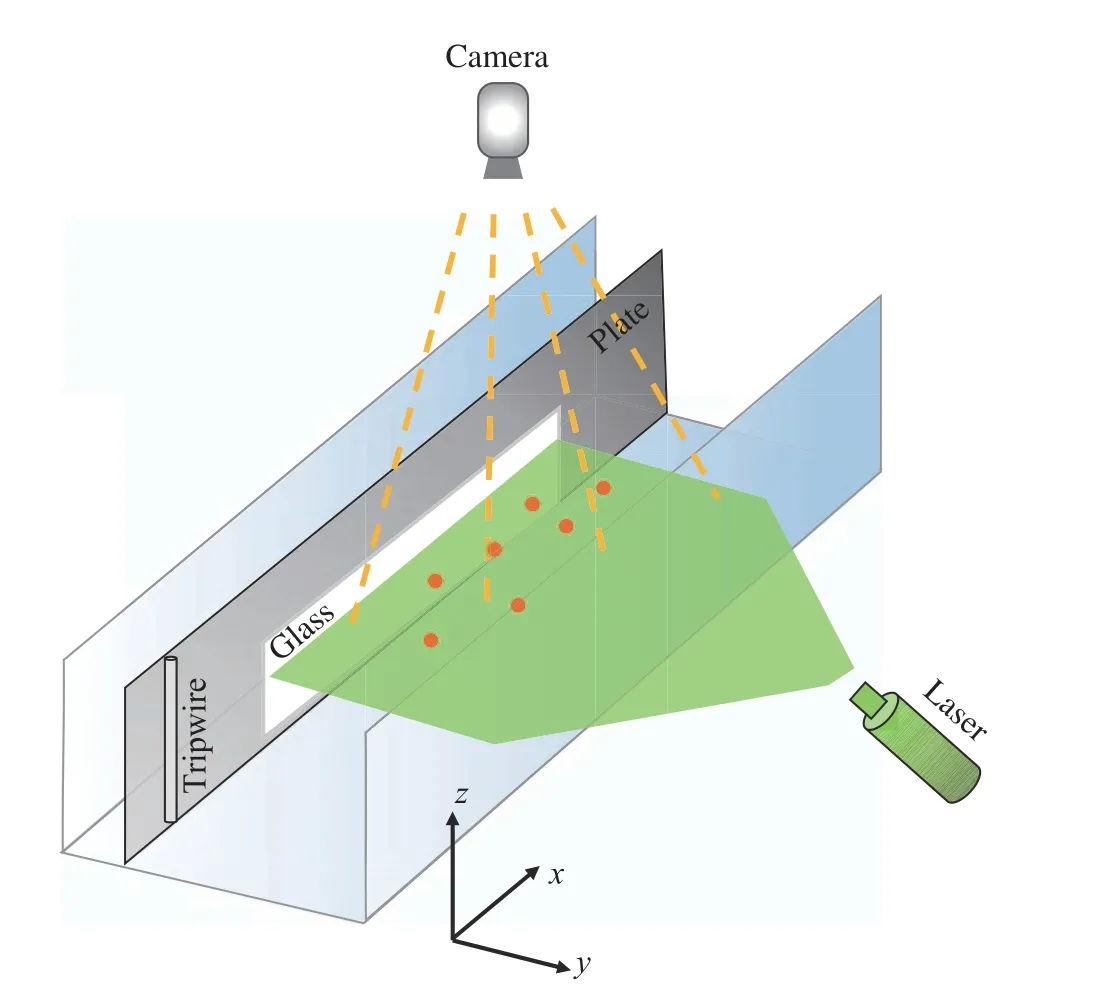
圖9 Ma = 6超聲速PIV實驗示意圖Fig. 9 PIV experimental sketch for flat-plate flow at Ma = 6
為了便于算法驗證,截取實驗圖像部分區(qū)域進行分析,如圖10所示。截取粒子圖像底部,靠近壁面且與壁面平行,大小為1024 pixel × 1024 pixel;對應(yīng)物理空間為11.2 mm × 11.2 mm,成像區(qū)域最上游距模型最前沿235 mm,該位置邊界層厚度為4.4 mm。
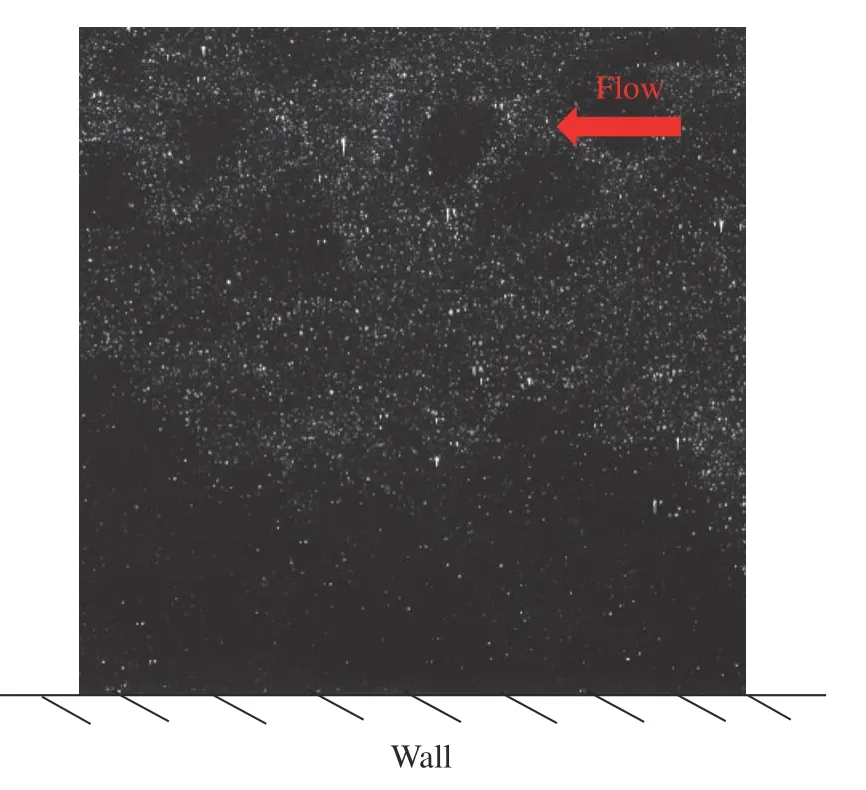
圖10 Ma = 6超聲速PIV實驗結(jié)果Fig. 10 PIV experimental image for flat-plate flow at Ma = 6
使用改進的動態(tài)閾值法進行粒子識別并進行維諾多邊形劃分,得到如圖11(a)所示的維諾圖。計算DBV密度并以密度閾值ρ= 0.003進行二分類,使用基于高斯核函數(shù)的SVM進行稀疏區(qū)和稠密區(qū)劃分。考慮到對小區(qū)域應(yīng)用PTV沒有意義,故剔除劃分結(jié)果中面積較小的稀疏區(qū)域,得到最終的劃分邊界如圖11(a)中橙色線條所示。
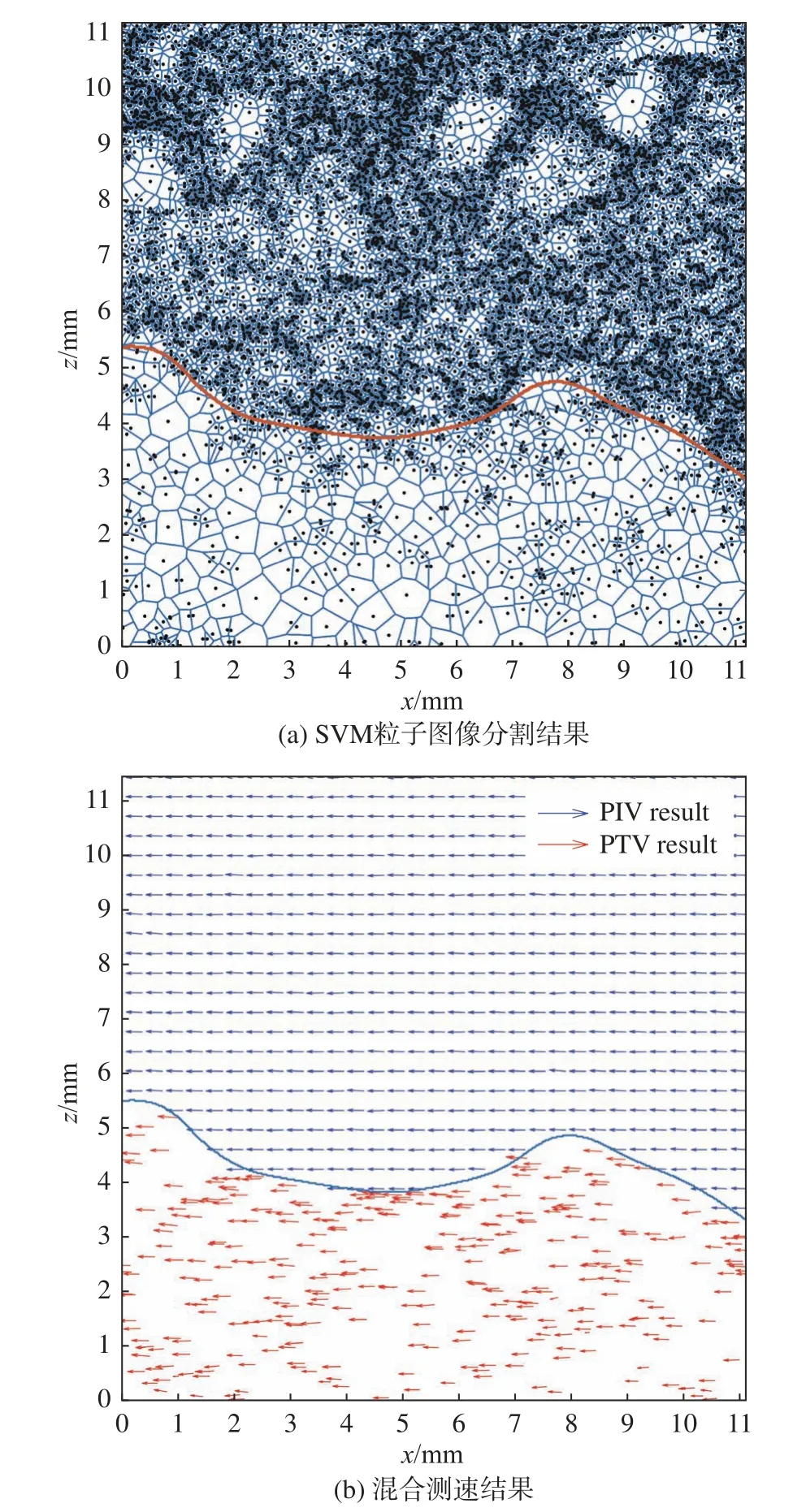
圖11 超速平板邊界層混合PIV-PTV結(jié)果Fig. 11 Hybrid PIV-PTV results for flat-plate flow at Ma = 6
超聲速平板邊界層混合PIV-PTV測量的瞬時速度場結(jié)果如圖11(b)所示,其中藍色箭頭為PIV測速結(jié)果,紅色箭頭為PTV測速結(jié)果。可以看到,使用基于粒子圖像分割的混合算法,可以實現(xiàn)對粒子稀疏區(qū)域的分割,進而對近壁區(qū)域使用誤差更小的PTV算法,從而緩解近壁粒子濃度低帶來的PIV測量不確定度高、空間分辨率低的問題。
5 結(jié)論
本文發(fā)展了一種基于粒子圖像分割的混合PIVPTV測速方法,用以解決PIV測速實驗中局部區(qū)域示蹤粒子分布不均勻的問題。算法的基本流程是:首先進行單個粒子識別,對每個粒子計算維諾多邊形和DBV密度;設(shè)定閾值對粒子打標簽,使用基于高斯核的SVM、依據(jù)DBV密度對粒子進行分類,從而實現(xiàn)對粒子圖像稀疏區(qū)和稠密區(qū)的分割;對分割出的粒子稀疏區(qū)和稠密區(qū)分別應(yīng)用PTV和PIV算法計算速度場,實現(xiàn)混合PIV-PTV測速。仿真結(jié)果和高速風洞實驗表明,SVM方法可以實現(xiàn)對粒子圖像基于粒子分布密度的分割,混合PIV-PTV測速方法可以顯著提高粒子分布不均場景下的速度測量精度。
需要指出的是,對粒子濃度分布進行簡單的二分類不能總是滿足工程的需求,在后續(xù)研究中可以發(fā)展基于粒子濃度的分級策略,對不同濃度的粒子區(qū)域在應(yīng)用PIV時自適應(yīng)地使用不同的查詢窗口,從而進一步挖掘PIV的后處理潛力。
猜你喜歡
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學學報(2015年3期)2015-12-10 03:49:15