基于智能卸荷電路的雙饋風(fēng)電機(jī)組故障穿越控制
2024-03-28 12:09:12魯華永袁越
可再生能源 2024年3期
關(guān)鍵詞:故障
魯華永,袁越
(1.河海大學(xué)能源與電氣學(xué)院,江蘇 南京 210098;2.國(guó)網(wǎng)河南省電力公司電力調(diào)度控制中心,河南 鄭州450052)
0 引言
為實(shí)現(xiàn)“雙碳”目標(biāo)[1],可再生能源發(fā)電在電網(wǎng)系統(tǒng)中得到了大力發(fā)展,風(fēng)電因其資源豐富、發(fā)電成本低、建設(shè)周期短的優(yōu)勢(shì)得到了廣泛應(yīng)用。然而,隨著電力系統(tǒng)中風(fēng)電滲透率的不斷提高,其對(duì)電網(wǎng)整體穩(wěn)定運(yùn)行帶來了挑戰(zhàn)。當(dāng)電網(wǎng)發(fā)生電壓下跌或驟升故障時(shí),一方面電網(wǎng)因風(fēng)機(jī)并網(wǎng)導(dǎo)致電壓支撐能力減弱,另一方面風(fēng)機(jī)為了自我保護(hù)會(huì)主動(dòng)與電網(wǎng)解列,在兩要素的作用下,進(jìn)一步加劇了故障程度,甚至?xí)?dǎo)致系統(tǒng)崩潰。因此在電網(wǎng)出現(xiàn)故障時(shí),風(fēng)電機(jī)組的故障穿越能力愈發(fā)重要[2,3]。
在風(fēng)電機(jī)組低電壓穿越(Low-Voltage Ride Through,LVRT)控制上,國(guó)內(nèi)外學(xué)者進(jìn)行了大量研究,提出了撬棒(Crowbar)電路[4,5]。傳統(tǒng)Crowbar保護(hù)雖有效避免了故障期間風(fēng)電脫機(jī)問題,但由于其電阻值固定,電路調(diào)節(jié)能力有限,只能適用于特定故障類型,面對(duì)不同電壓跌落深度時(shí),難以保證調(diào)節(jié)效果。文獻(xiàn)[6]提出了一種動(dòng)態(tài)調(diào)節(jié)轉(zhuǎn)子Crowbar阻值的LVRT方案,通過自適應(yīng)控制策略對(duì)電阻值進(jìn)行整定,實(shí)現(xiàn)不同故障下的不同電阻值投入。與固定阻值的傳統(tǒng)Crowbar方法相比,其在抑制轉(zhuǎn)子電流和直流母線電壓效果上更加明顯,且Crowbar投入次數(shù)也大大減少。然而Crowbar投入期間轉(zhuǎn)子側(cè)變流器閉鎖,風(fēng)電機(jī)組需從電網(wǎng)吸收大量無功功率進(jìn)行勵(lì)磁,造成系統(tǒng)無功缺額增加、直流電壓升高,不利于電壓恢復(fù)。文獻(xiàn)[7]提出了一種直流卸荷(Chopper)電路和變槳距角的協(xié)調(diào)控制方案,在故障初期通過投入Chopper電路快速吸收盈余功率,同時(shí)調(diào)整槳距角徹底消除盈余功率,切除卸荷回路,有效實(shí)現(xiàn)故障期間的LVRT。文獻(xiàn)[8]采用定子與電網(wǎng)間串聯(lián)電阻、轉(zhuǎn)子變流器輸出無功電流方式支撐電網(wǎng)電壓。文獻(xiàn)[9]則在定子上串聯(lián)電抗來抑制故障時(shí)電流升高,同時(shí)在轉(zhuǎn)子變流器控制中附加無功控制,保證故障期間風(fēng)機(jī)的無功功率支撐和電網(wǎng)電壓的恢復(fù)。
風(fēng)電機(jī)組LVRT恢復(fù)過程中,由于故障清除或負(fù)荷退出容易引發(fā)電壓驟升現(xiàn)象,并且當(dāng)單相重合閘工況出現(xiàn)和無功補(bǔ)償設(shè)備未及時(shí)撤出造成無功功率過剩時(shí),也會(huì)造成電網(wǎng)電壓驟升,也就是在風(fēng)電機(jī)組LVRT成功后,仍然面臨著高電壓穿越(High-Voltage Ride Through,HVRT)的風(fēng)險(xiǎn)。目前關(guān)于風(fēng)電機(jī)組HVRT的研究成果較少,解決方案仍集中在改進(jìn)風(fēng)電機(jī)組變流器控制策略[10-12]和附加硬件設(shè)備[13,14]兩方面。在軟件改進(jìn)上,文獻(xiàn)[10]利用虛擬阻抗控制提高雙饋風(fēng)機(jī)的HVRT能力,然而,當(dāng)轉(zhuǎn)子電流超過轉(zhuǎn)子側(cè)變換器的安全裕度時(shí),硬件部分Crowbar電路仍會(huì)被激活[11]。為避免Crowbar電路的頻繁投切,文獻(xiàn)[12]在轉(zhuǎn)子側(cè)附加轉(zhuǎn)子電流抑制,同時(shí)在網(wǎng)側(cè)附加外環(huán)電壓控制,極大地改善了風(fēng)電機(jī)組的HVRT能力。在附加硬件設(shè)備改進(jìn)方法上,文獻(xiàn)[13]在電壓驟升期間通過啟動(dòng)Chopper電路吸收盈余能量、抑制直流側(cè)過電壓、保護(hù)直流母線電容,不足之處在于卸荷電路的頻繁投切會(huì)使電流波形產(chǎn)生畸變,不利于電網(wǎng)穩(wěn)定。文獻(xiàn)[14]采用直流電壓協(xié)調(diào)控制方案,通過無功電流控制和超級(jí)電容儲(chǔ)能系統(tǒng)對(duì)直流過電壓進(jìn)行了限制,然而儲(chǔ)能的配置使得風(fēng)機(jī)的投資和運(yùn)行成本大大增加。
為了實(shí)現(xiàn)并網(wǎng)風(fēng)電機(jī)組高低壓穿越功能需求,同時(shí)解決直流卸荷電路頻繁投切和超級(jí)電容器經(jīng)濟(jì)成本過高的問題,本文提出了基于智能卸荷電路的風(fēng)電機(jī)組故障穿越控制方案。該方法在直流卸荷電路基礎(chǔ)上進(jìn)行改進(jìn),將DC/DC控制電路與卸荷電阻相連接,通過在控制電路內(nèi)引入有功功率-直流電壓下垂環(huán)節(jié),實(shí)現(xiàn)電路電阻吸收功率隨電壓波動(dòng)的平滑調(diào)節(jié)。該策略同時(shí)設(shè)有LVRT和HVRT兩種模式,根據(jù)并網(wǎng)點(diǎn)電壓突變情況自動(dòng)識(shí)別,保證風(fēng)電機(jī)組在電壓突增或驟降故障下均能成功穿越。所提控制方案不僅有效避免卸荷電路頻繁投切引起的電壓、電流波形畸變,還能在保持與超級(jí)電容儲(chǔ)能控制同樣故障穿越性能的前提下大幅度減少經(jīng)濟(jì)投入。
1 國(guó)內(nèi)外故障穿越技術(shù)要求
為避免故障造成風(fēng)電機(jī)組解列、電網(wǎng)崩潰,提高電網(wǎng)運(yùn)行的安全可靠性,世界各國(guó)針對(duì)電網(wǎng)運(yùn)行特點(diǎn)、風(fēng)電機(jī)組容量和線路耐壓能力提出了相應(yīng)的風(fēng)機(jī)故障穿越能力要求。表1,2分別列出了世界主要國(guó)家風(fēng)機(jī)LVRT和HVRT的并網(wǎng)規(guī)范。風(fēng)機(jī)故障穿越并網(wǎng)規(guī)范主要對(duì)電網(wǎng)發(fā)生故障導(dǎo)致電壓或頻率波動(dòng)時(shí),風(fēng)機(jī)維持并網(wǎng)運(yùn)行的最低/高電壓提出了要求,同時(shí)規(guī)定了該工況下風(fēng)機(jī)保持運(yùn)行的時(shí)長(zhǎng)以及恢復(fù)至穩(wěn)定電壓所需的時(shí)間。
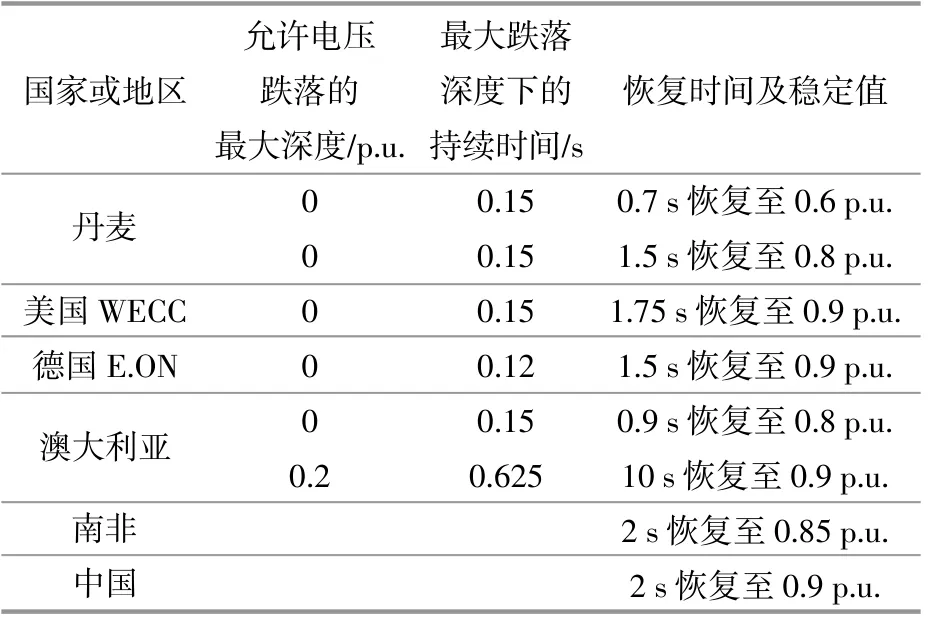
表1 部分國(guó)家或地區(qū)的LVRT技術(shù)要求Table 1 Technical requirements for low voltage ride through in some countries or regions
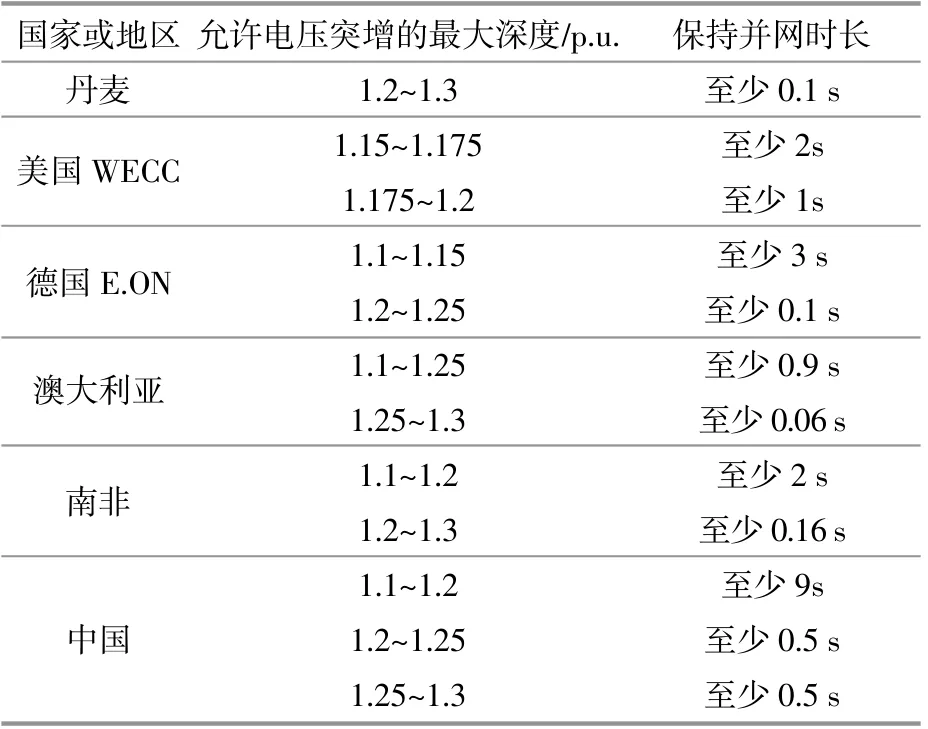
表2 部分國(guó)家或地區(qū)的HVRT技術(shù)要求Table 2 Technical requirements for high voltage ride through in some countries or regions
由表1,2可以看出,針對(duì)LVRT問題,國(guó)外大多數(shù)國(guó)家和地區(qū)均要求機(jī)組具備零電壓穿越(Zero-Voltage Ride Through,ZVRT)能力,即因故障導(dǎo)致系統(tǒng)電壓突然下降為0時(shí),風(fēng)電機(jī)組也能在0.12~0.15 s內(nèi)維持并網(wǎng)運(yùn)行,并可以在規(guī)定時(shí)間段內(nèi)恢復(fù)到穩(wěn)定值。而在HVRT問題上,則要求風(fēng)電機(jī)組在系統(tǒng)電壓升高到1.10~1.30 p.u.時(shí)保持一定時(shí)間的并網(wǎng)運(yùn)行[15-17],平穩(wěn)“穿越”高電壓。不同國(guó)家在電壓升高幅值和保持并網(wǎng)時(shí)間上雖有所差異,但均規(guī)定當(dāng)系統(tǒng)電壓上升到1.1 p.u.及其以下值時(shí)風(fēng)機(jī)能實(shí)現(xiàn)不間斷并網(wǎng)運(yùn)行。
對(duì)于我國(guó)風(fēng)電機(jī)組LVRT/HVRT技術(shù)要求如圖1所示。曲線1為L(zhǎng)VRT要求,曲線2為HVRT要求。
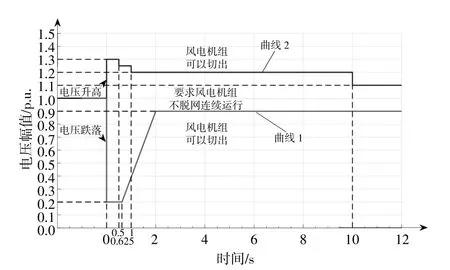
圖1 我國(guó)風(fēng)電機(jī)組高LVRT要求Fig.1 Requirements for high and low voltage ride through of wind turbines in China
由圖1可知,當(dāng)并網(wǎng)電壓下跌至0.2 p.u.時(shí),風(fēng)機(jī)在625 ms內(nèi)能維持安全可靠不脫網(wǎng)運(yùn)行,并且能夠向電網(wǎng)提供無功支撐,且無功電流需在75 ms內(nèi)響應(yīng)、持續(xù)時(shí)間不少于550 ms,進(jìn)而保證并網(wǎng)電壓能夠在2 s內(nèi)恢復(fù)至0.9 p.u.。當(dāng)并網(wǎng)電壓突升至1.3 p.u.時(shí),風(fēng)電機(jī)組能在500 ms內(nèi)不脫機(jī)運(yùn)行,并能助力并網(wǎng)電壓升高后10 s內(nèi)恢復(fù)至1.1 p.u.以下。構(gòu)成了故障期間風(fēng)機(jī)不脫網(wǎng)連續(xù)運(yùn)行區(qū)域,而在曲線1以上和曲線2以下的區(qū)域內(nèi),運(yùn)行風(fēng)機(jī)則允許從電網(wǎng)切出[18]。
2 雙饋風(fēng)電機(jī)組故障穿越控制策略研究
雙饋風(fēng)電機(jī)組作為風(fēng)力發(fā)電機(jī)的主流機(jī)型之一。雙饋風(fēng)機(jī)的定子側(cè)與電網(wǎng)直接連接,轉(zhuǎn)子側(cè)通過PWM變流器與電網(wǎng)相連,該結(jié)構(gòu)雖有效降低變流器容量成本,但相較于采用背靠背變流器與電網(wǎng)相連的直驅(qū)風(fēng)機(jī),不能獨(dú)立于電網(wǎng)運(yùn)行,受電網(wǎng)狀態(tài)影響大,面對(duì)電網(wǎng)故障時(shí),LVRT難度更高,控制手段更為復(fù)雜。因此,本文在研究風(fēng)電機(jī)組故障穿越控制策略時(shí),以雙饋風(fēng)電機(jī)組為研究對(duì)象。當(dāng)電網(wǎng)電壓發(fā)生驟升/驟降故障時(shí),由于雙饋風(fēng)電機(jī)組定子端與電網(wǎng)直連,風(fēng)機(jī)定子電壓受并網(wǎng)點(diǎn)電壓影響突增,依據(jù)磁鏈?zhǔn)睾愣桑ㄗ永@組上將感生出非周期、直流磁鏈,進(jìn)而在轉(zhuǎn)子側(cè)感應(yīng)出電動(dòng)勢(shì)。然而受到雙饋風(fēng)電機(jī)組變流器容量限制,轉(zhuǎn)子電壓不足以抵消該電動(dòng)勢(shì),導(dǎo)致轉(zhuǎn)子阻抗上產(chǎn)生較大的壓降,引發(fā)轉(zhuǎn)子電流的驟升和直流母線電壓的抬高。并且在故障時(shí)為防止脫機(jī)事件發(fā)生,風(fēng)電機(jī)組會(huì)通過網(wǎng)側(cè)變流器向電網(wǎng)輸送無功功率,但網(wǎng)側(cè)變流器的容量有限,無功功率輸出量的增加必定會(huì)導(dǎo)致有功功率輸出量的減少,多余能量無法流出致直流母線電壓升高,轉(zhuǎn)子轉(zhuǎn)速不受控制,危及系統(tǒng)的安全穩(wěn)定運(yùn)行。
2.1 直流卸荷電路控制
為了防止電網(wǎng)故障時(shí)直流母線電壓的過度升高導(dǎo)致雙饋風(fēng)電機(jī)組脫網(wǎng),文獻(xiàn)[13]采用Chopper電路解決該問題,其電路原理如圖2所示。
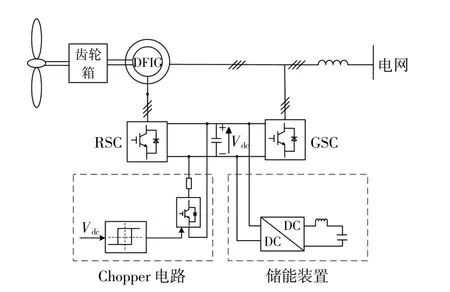
圖2 雙饋風(fēng)電機(jī)組故障穿越控制框圖Fig.2 Block diagram of fault ride through control of doubly fed wind turbine
Chopper電路采用高電壓投入、低電壓返回的滯環(huán)邏輯控制晶體管的通斷,通過將電阻并聯(lián)在風(fēng)機(jī)直流母線上以消耗多余沖擊功率的方式,維持了直流電壓的穩(wěn)定。電阻投入與否則由直流母線電壓決定,當(dāng)電網(wǎng)故障導(dǎo)致直流母線電壓高于門檻值時(shí),卸荷電路投入運(yùn)行,Chopper電阻并聯(lián)于直流母線處消耗多余能量;當(dāng)直流母線電壓低于門檻值或系統(tǒng)處于穩(wěn)定狀態(tài)時(shí),Chopper電阻不投入運(yùn)行。卸荷電路通過電阻頻繁投切的方式,將直流母線電壓維持在某一固定區(qū)間內(nèi),有效避免了直流母線電容被擊穿現(xiàn)象的發(fā)生,但其反復(fù)投切容易引起電壓、電流波形的畸變,且無法實(shí)現(xiàn)風(fēng)機(jī)功率的平滑調(diào)節(jié)。
2.2 超級(jí)電容儲(chǔ)能控制
超級(jí)電容器作為儲(chǔ)能設(shè)備的一種,具有功率密度高、設(shè)備容量大、充放電時(shí)間短、循環(huán)次數(shù)多、適應(yīng)溫度范圍廣的優(yōu)點(diǎn),適用于故障穿越的場(chǎng)合[19]。基于超級(jí)電容器的雙饋風(fēng)機(jī)故障穿越控制策略的拓?fù)浣Y(jié)構(gòu)見圖2。超級(jí)電容器通過雙向DC/DC變換器連接在直流母線側(cè),通過變流器對(duì)超級(jí)電容器的充放電控制,實(shí)現(xiàn)過剩有功功率的吸收,維持直流母線電壓穩(wěn)定,直到電網(wǎng)電壓恢復(fù)正常,電壓穿越完成。當(dāng)風(fēng)機(jī)直流母線電壓高于設(shè)定值時(shí),DC/DC變換器工作在降壓電路狀態(tài),向超級(jí)電容器充電以存儲(chǔ)風(fēng)機(jī)多余能量;當(dāng)直流母線電壓低于設(shè)定值時(shí),DC/DC變換器工作在升壓電路狀態(tài),超級(jí)電容器向風(fēng)機(jī)放電,釋放儲(chǔ)能以提高直流母線電壓。超級(jí)電容儲(chǔ)能控制阻止了故障期間直流母線電壓的升高,緩解了風(fēng)機(jī)與電網(wǎng)間能量流動(dòng)不匹配的問題,也實(shí)現(xiàn)了風(fēng)機(jī)功率的平滑調(diào)節(jié),但由于成本較高,不利于系統(tǒng)運(yùn)行經(jīng)濟(jì)性。
2.3 智能卸荷電路控制
為了改善直流卸荷電路和超級(jí)電容器儲(chǔ)能控制方案的不足,同時(shí)兼顧風(fēng)機(jī)故障穿越能力和系統(tǒng)運(yùn)行成本,本文提出了一種基于智能卸荷電路的風(fēng)機(jī)故障穿越控制方法,通過動(dòng)態(tài)調(diào)節(jié)故障期間智能卸荷電路吸收功率的大小,實(shí)現(xiàn)不同故障工況下風(fēng)電機(jī)組的電壓平穩(wěn)穿越。智能卸荷電路控制原理如圖3所示。
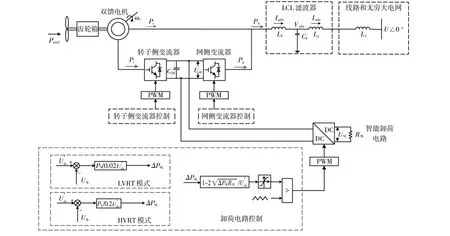
圖3 基于智能卸荷電路的雙饋風(fēng)電機(jī)組故障穿越控制框圖Fig.3 Fault ride through control block diagram of doubly fed wind turbine based on smart unloading circuit
通過DC/DC變換器將固定值電阻與直流母線電壓相連。當(dāng)電網(wǎng)電壓故障導(dǎo)致直流母線電壓升高時(shí),并聯(lián)在直流母線側(cè)的智能卸荷電路啟動(dòng),通過并聯(lián)電阻消耗風(fēng)機(jī)內(nèi)部多余能量,直至電網(wǎng)電壓和風(fēng)機(jī)直流母線電壓恢復(fù)正常,智能卸荷電路退出。智能卸荷電路彌補(bǔ)了直流Chopper電路無法完成有功功率平滑調(diào)節(jié)的缺陷,模擬了虛擬同步發(fā)電機(jī)控制原理,引入下垂控制環(huán)節(jié),通過對(duì)DC/DC變流器的控制,在電路阻值固定的前提下實(shí)現(xiàn)吸收有功功率的動(dòng)態(tài)調(diào)節(jié)。由于故障期間智能卸荷電路消耗盈余能量的多少主要由風(fēng)機(jī)直流母線電壓值決定,因此建立了以有功功率-直流母線電壓(PSL-Udc)為聯(lián)系的下垂控制,以此動(dòng)態(tài)平衡風(fēng)機(jī)內(nèi)部有功功率,維持直流母線電壓穩(wěn)定。
考慮到LVRT和HVRT均會(huì)使得直流母線電壓Udc升高,又由于兩種情況下直流母線電壓允許最大偏差不同,下垂系數(shù)KD也有所差別,因此智能卸荷電路設(shè)置了LVRT和HVRT兩種模式。在下垂系數(shù)KD選擇上,考慮到HVRT會(huì)導(dǎo)致網(wǎng)側(cè)變流器耐高壓調(diào)節(jié)能力達(dá)到上限,引發(fā)變流器過調(diào)制、機(jī)組失穩(wěn)和功率交直流耦合振蕩,因此結(jié)合風(fēng)電機(jī)組HVRT范圍(1.1~1.3 p.u.)及電壓波動(dòng)幅值(0.2 p.u.),在穿越過程中為直流母線電壓留有波動(dòng)裕量,按照Udc最大抬升值為0.2 p.u.設(shè)置下垂系數(shù),進(jìn)而將調(diào)制比控制在合理范圍內(nèi)。而在LVRT模式下,交流電壓下降,不存在網(wǎng)側(cè)變流器失控情況,故直流母線電壓可盡量維持恒定,下垂系數(shù)以其最大偏差值設(shè)置為0.02 p.u.。本文有功功率-直流母線電壓下垂控制關(guān)系式為
式中:ΔPSL為智能卸荷電路有功功率調(diào)節(jié)值;ΔUdc為風(fēng)機(jī)直流母線電壓偏差值;KD為下垂控制系數(shù)。
本文根據(jù)式(1)不同工況下,以直流母線電壓為控制電路的輸入量時(shí),確定智能卸荷電路有功功率期望值。
占空比D計(jì)算式為
式中:ΔUSL為智能卸荷電路電壓;RSL為智能卸荷電路電阻。
將功率-電壓下垂控制環(huán)節(jié)輸出的功率指令換算成占空比信號(hào),與三角載波信號(hào)進(jìn)行比較,產(chǎn)生DC/DC變流器控制電路的脈寬調(diào)制信號(hào),控制智能卸荷電路電壓USL按期望值實(shí)時(shí)調(diào)整,保證即使在電路電阻固定的情況下,電路吸收有功功率也能依據(jù)直流母線電壓波動(dòng)及時(shí)調(diào)整,進(jìn)而實(shí)現(xiàn)故障期間智能卸荷電路有功功率的平滑調(diào)節(jié)。智能卸荷電路運(yùn)行期間,等效電路如圖4所示。變換器開關(guān)管SC1工作于PWM方式時(shí),開關(guān)管SC2工作于二極管模式,此時(shí)可看做是Buck電路。
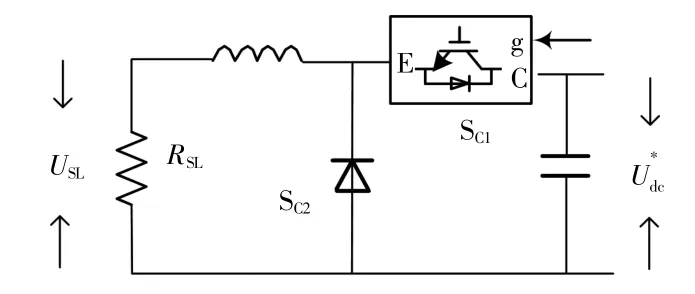
圖4 Buck型智能卸荷電路Fig.4 Buck smart unloading circuit
實(shí)現(xiàn)風(fēng)電機(jī)組故障穿越功能,除了維持風(fēng)機(jī)內(nèi)部有功功率平衡外,也需要風(fēng)電機(jī)組向電網(wǎng)提供動(dòng)態(tài)無功支撐、助力電壓恢復(fù)。智能卸荷電路以現(xiàn)有電網(wǎng)對(duì)風(fēng)機(jī)的無功支撐要求為依據(jù),故障穿越期間對(duì)轉(zhuǎn)子側(cè)和網(wǎng)側(cè)變流器采用了如下控制手段。
①系統(tǒng)正常運(yùn)行時(shí),網(wǎng)側(cè)變流器采用單位功率因數(shù)方式運(yùn)行,僅向電網(wǎng)輸出有功功率。當(dāng)電網(wǎng)電壓跌落至額定電壓的20%~90%時(shí),風(fēng)機(jī)開啟LVRT模式,網(wǎng)側(cè)變流器由單位功率運(yùn)行切換為無功調(diào)節(jié)狀態(tài),優(yōu)先發(fā)出無功功率,支撐電壓恢復(fù)。此時(shí),網(wǎng)側(cè)變流器無功電流動(dòng)態(tài)響應(yīng)并網(wǎng)點(diǎn)電壓波動(dòng),根據(jù)標(biāo)準(zhǔn)要求,其參考值為
式中:Ug為并網(wǎng)點(diǎn)電壓標(biāo)幺值;IN為網(wǎng)側(cè)變流器額定電流;K1為無功電流動(dòng)態(tài)調(diào)節(jié)系數(shù),一般取值為1.5~3。
②當(dāng)電網(wǎng)電壓驟升至額定電壓的110%~130%時(shí),風(fēng)機(jī)開啟HVRT模式,網(wǎng)側(cè)變流器處于無功調(diào)節(jié)狀態(tài),優(yōu)先吸收無功功率,支撐電壓并網(wǎng)恢復(fù)。此時(shí),網(wǎng)側(cè)變流器無功電流的參考值為
式中:K2為無功電流動(dòng)態(tài)調(diào)節(jié)系數(shù),其取值應(yīng)大于1.5。
由于變流器容量有限,當(dāng)開啟無功功率優(yōu)先模式時(shí),無功電流輸出增加,有功電流輸出必然會(huì)減少。因此,為保證變流器安全運(yùn)行,通過式(3)對(duì)有功功率進(jìn)行限制,有功電流參考值為
式中:Imax為變流器允許流過最大電流。
與Chopper電路相比,智能卸荷電路在電阻不變的前提下增設(shè)了DC/DC變流器,而在選擇DC/DC變流器額定功率時(shí),考慮到重度故障下存在風(fēng)機(jī)轉(zhuǎn)子側(cè)變流器均輸出無功功率、盈余有功功率需經(jīng)過DC/DC變流器流入電路電阻的工況,設(shè)置DC/DC變流器參數(shù)和轉(zhuǎn)子側(cè)變流器相同。以1.5 MW雙饋風(fēng)電機(jī)組為例,某廠家采用額定功率為480 kW的轉(zhuǎn)子側(cè)變流器價(jià)格如表3所示。

表3 超級(jí)電容器和變流器單價(jià)Table 3 Unit price of super capacitor and converter
智能卸荷電路大約需增加經(jīng)濟(jì)成本38.4萬元。相較于超級(jí)電容器控制,智能卸荷電路在控制電路變換器不變的前提下,用固定阻值電阻替代超級(jí)電容器。超級(jí)電容器控制策略選擇參數(shù)時(shí),考慮到風(fēng)機(jī)故障穿越時(shí)間較短(一般不超過2 s),超級(jí)電容器容量設(shè)為480 kW×2 s,額定功率與變流器相同為480 kW,其經(jīng)濟(jì)投入約為73萬元。智能卸荷電路雖比Chopper多投入了變流器成本,但保證了風(fēng)機(jī)功率的平滑調(diào)節(jié),并且相較于超級(jí)電容器控制,經(jīng)濟(jì)成本大大降低。
3 仿真驗(yàn)證及分析
本文在Matlab/Simiulink系統(tǒng)中搭建了圖3的雙饋風(fēng)機(jī)并網(wǎng)模型,對(duì)所提故障穿越控制策略進(jìn)行驗(yàn)證。雙饋風(fēng)電機(jī)組參數(shù)如下:額定功率為1.5 MW,額定頻率為50 Hz,機(jī)端額定電壓為690 V,直流母線電壓為1 150 V。定子電阻為0.007 06 p.u.,定子漏感為0.171 p.u.,轉(zhuǎn)子電阻為0.005 p.u.,轉(zhuǎn)子漏感為0.156 p.u.,互感為2.9 p.u.。
本文分別設(shè)置了電壓跌落、電壓驟升、輕度故障、重度故障工況進(jìn)行仿真分析,同時(shí)將智能卸荷電路的電壓穿越效果與Chopper電路、超級(jí)電容器儲(chǔ)能控制方案進(jìn)行對(duì)比,從直觀數(shù)據(jù)上驗(yàn)證智能卸荷電路故障穿越控制的可行性與優(yōu)勢(shì)。
3.1 輕度故障
設(shè)置3 s時(shí)電網(wǎng)發(fā)生電壓突增或驟降的輕度故障,故障持續(xù)時(shí)間0.4 s,電壓變化幅度均為15%。圖5顯示了風(fēng)電機(jī)組在輕度LVRT,HVRT時(shí)直流側(cè)母線電壓、網(wǎng)側(cè)變流器輸出功率、定子功率的仿真結(jié)果。
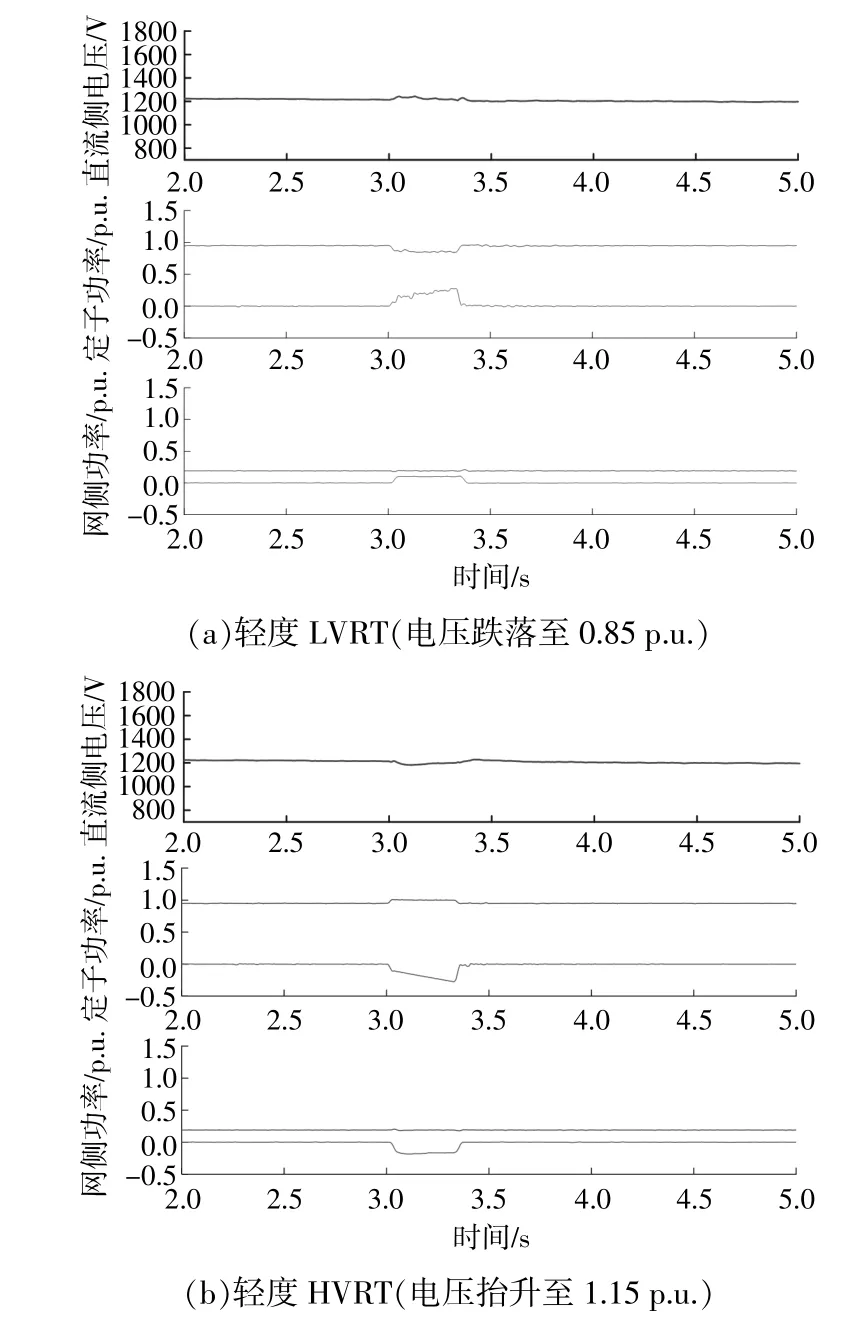
圖5 輕度LVRT/HVRT風(fēng)電機(jī)組仿真波形Fig.5 DFIG Simulation waveform in mild LVRT/HVRT
由圖5可以看出,當(dāng)電網(wǎng)電壓跌落至0.85 p.u.時(shí),直流母線電壓上升至1 250 V,直流電壓變化幅度未超過設(shè)定上限值。因此,無論是Chopper電路、超級(jí)電容器控制電路或是智能卸荷電路,均不投入運(yùn)行,并網(wǎng)點(diǎn)電壓和風(fēng)機(jī)運(yùn)行參數(shù)變化曲線完全一致。而當(dāng)并網(wǎng)點(diǎn)電壓抬升至1.15 p.u.時(shí),直流母線電壓有輕微下跌,但此時(shí)風(fēng)機(jī)故障穿越控制電路仍然不啟動(dòng)。因此,3種控制方案下風(fēng)機(jī)功率、電流參數(shù)基本一致,與風(fēng)電機(jī)組無故障穿越控制相同。由仿真結(jié)果可以看出,在輕度故障下,由于直流母線電壓的變化未超過上限值,因此3種故障穿越控制電路均不啟動(dòng),風(fēng)機(jī)運(yùn)行狀況相同。
3.2 重度故障
圖6為系統(tǒng)在3 s時(shí)電網(wǎng)電壓驟降至0.2 p.u.、發(fā)生持續(xù)時(shí)間0.4 s的重度故障時(shí),雙饋風(fēng)電機(jī)組在Chopper電路、超級(jí)電容器控制和智能卸荷電路控制下的仿真結(jié)果。
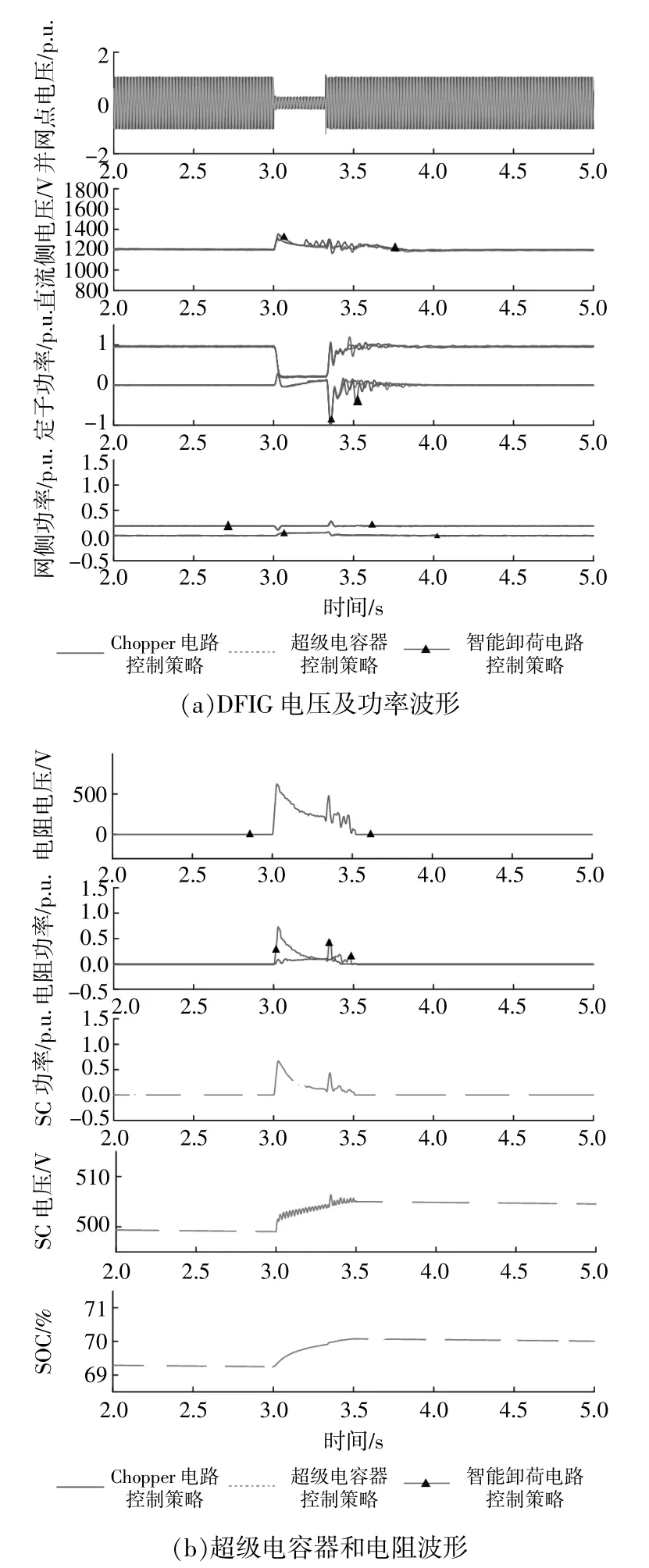
圖6 低電壓重度穿越故障仿真波形(電壓跌落至0.2 p.u.)Fig.6 Simulation waveform of low voltage severe ride through fault(voltage drop to 0.2 p.u.)
由圖6可知,在電壓跌落至0.2 p.u.的重度故障下,Chopper電路啟動(dòng),流經(jīng)電路電阻的功率也隨之增加,最高值可達(dá)0.12 p.u.。故障期間,直流側(cè)母線電壓在1 180~1 320 V波動(dòng),有效抑制了直流母線電壓大幅度升高,也使得網(wǎng)側(cè)和定子輸出功率較為穩(wěn)定,保證風(fēng)電機(jī)組并網(wǎng)不脫機(jī)運(yùn)行。采用超級(jí)電容器控制策略時(shí),通過增加超級(jí)電容器電壓及其荷電狀態(tài)(State of Charge,SOC)吸收多余能量,故障結(jié)束后超級(jí)電容器電壓由500 V升高到了505 V,SOC增加了1%,系統(tǒng)通過網(wǎng)側(cè)變流器向超級(jí)電容器充電以平衡風(fēng)機(jī)內(nèi)部有功功率,從而實(shí)現(xiàn)了雙饋風(fēng)電機(jī)組的低電壓故障穿越。采用智能卸荷電路控制時(shí),電路中電阻兩端電壓隨著直流母線電壓的波動(dòng)而變化,其變化趨勢(shì)基本一致。當(dāng)直流母線電壓在3.1 s達(dá)到最大值1 370 V時(shí),電路電阻電壓為610 V,吸收功率達(dá)到最大值0.71 p.u.,通過電路電阻吸收多余能量,使得風(fēng)機(jī)直流側(cè)母線電壓得到了明顯的抑制,實(shí)現(xiàn)了重度故障下風(fēng)電機(jī)組的LVRT。
設(shè)置電網(wǎng)電壓在3 s時(shí)驟升至1.3 p.u.,故障持續(xù)0.4 s,圖7顯示了重度故障下3種控制方案的仿真結(jié)果。
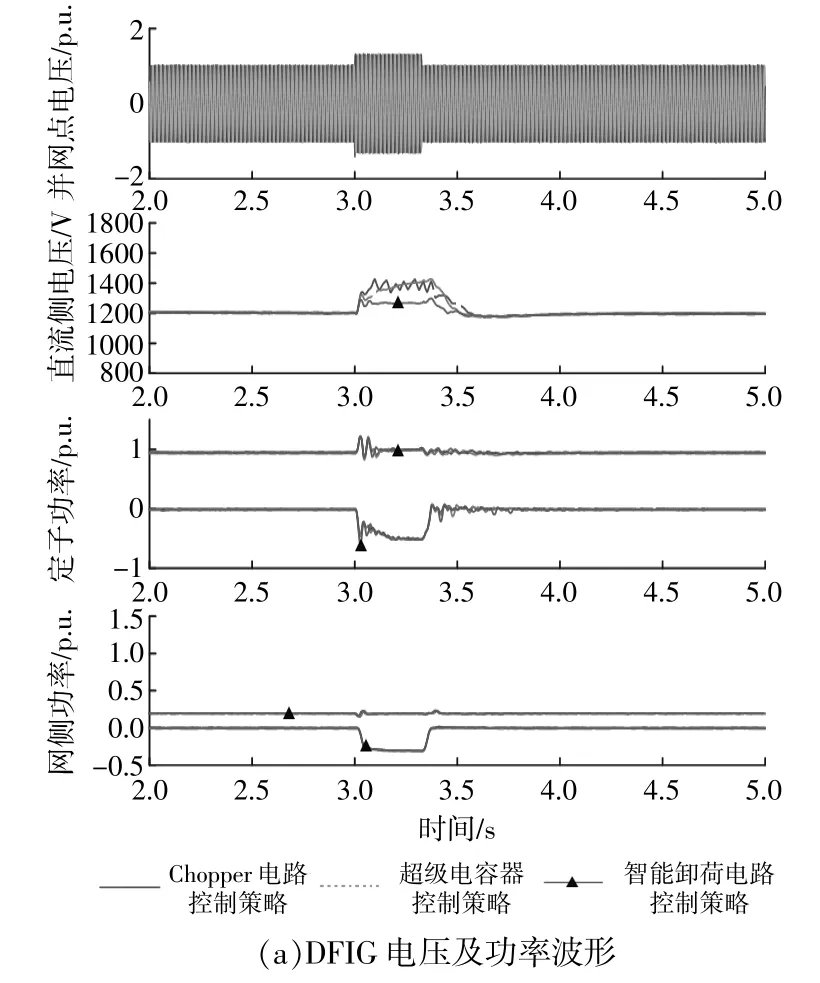
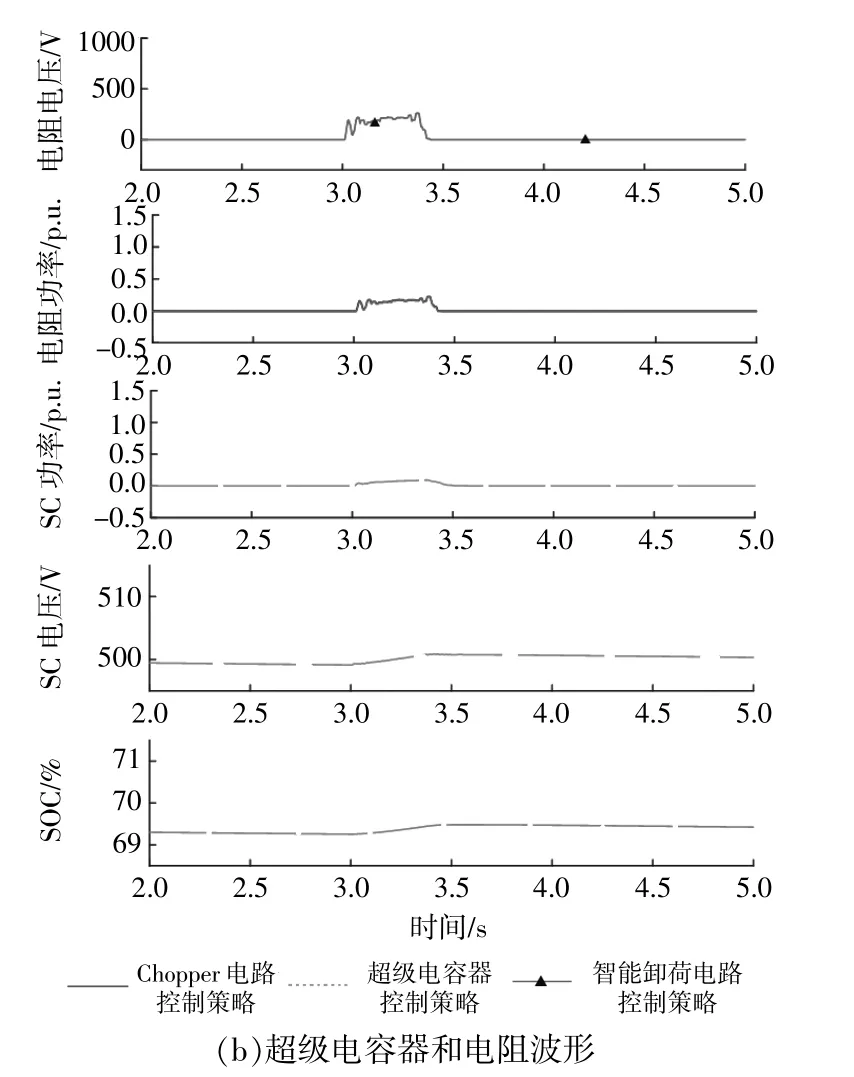
圖7 高電壓重度穿越故障仿真波形(電壓抬升至1.3 p.u.)Fig.7 Simulation waveform of high voltage severe ride through fault(voltage rises to 1.3 p.u.)
由圖7可知,直流母線電壓峰值超過了1.1 p.u.,為了防止直流母線電壓過高而損壞其他硬件裝置,Chopper電路投入運(yùn)行,通過提高電路中電阻功率來平衡系統(tǒng)能量,增加風(fēng)電機(jī)組運(yùn)行可靠性,電阻功率最高達(dá)到了0.11 p.u.。3.4 s時(shí)直流母線電壓低于設(shè)定的下限值,Chopper電路自動(dòng)切除,風(fēng)機(jī)故障穿越結(jié)束。超級(jí)電容器在故障導(dǎo)致直流母線電壓超過設(shè)定值即3 s時(shí)啟動(dòng),其電壓和SOC緩慢增加,實(shí)現(xiàn)雙饋風(fēng)電機(jī)組的高電壓故障穿越。而在故障切除后,超級(jí)電容器退出運(yùn)行,其電壓和SOC分別在605 V和69.5%保持恒定,系統(tǒng)恢復(fù)正常運(yùn)行。當(dāng)雙饋風(fēng)電機(jī)組采用智能卸荷電路實(shí)現(xiàn)機(jī)組故障穿越時(shí),電阻電壓隨著風(fēng)機(jī)直流母線電壓的上升而增加,流經(jīng)電阻功率隨著電壓波形變化相應(yīng)上升,在3.39 s時(shí)達(dá)到峰值。從仿真波形上看,直流側(cè)母線電壓相較于固定阻值的Chopper電路和超級(jí)電容器控制得到了較為明顯的改善,最大值由1 410 V降到了1 290 V,風(fēng)電機(jī)組實(shí)現(xiàn)了高電壓故障穿越的能力。
3.3 對(duì)比分析
為了更為清晰直觀的對(duì)比轉(zhuǎn)子卸荷電路、直流Chopper電路、超級(jí)電容器控制和智能卸荷電路的仿真效果,圖8~10分別給出了上述4種控制策略下風(fēng)電機(jī)組在重度HVRT/LVRT故障過程中并網(wǎng)點(diǎn)電壓Us、定子功率Ps和Qs、網(wǎng)側(cè)功率Pg和Qg以及直流母線電壓Udc等參數(shù)的最大偏差量、平均偏差量和恢復(fù)過程調(diào)節(jié)時(shí)間的對(duì)比。
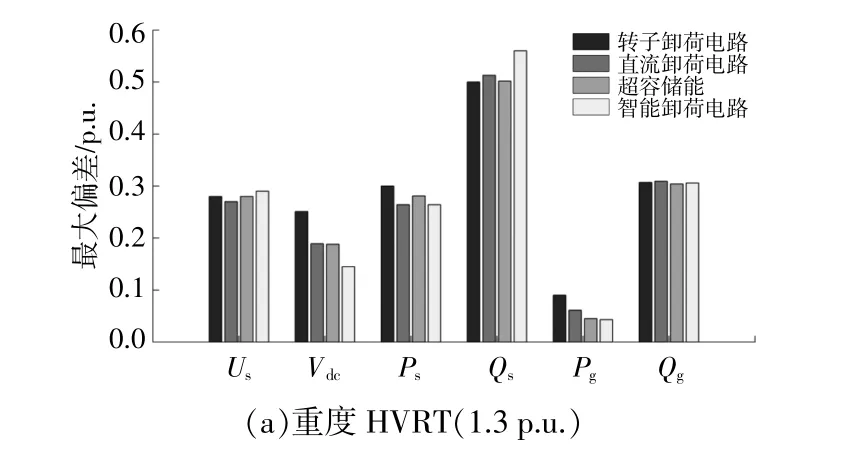
圖8 不同控制下風(fēng)機(jī)故障穿越參數(shù)最大偏差量Fig.8 Maximum deviation of DFIG fault ride through parameters under different control strategies
由圖8可以看出,無論是重度HVRT或LVRT故障,4種控制方案的網(wǎng)側(cè)無功功率Qs及并網(wǎng)點(diǎn)電壓Us的最大偏差量幾乎相等,HVRT下Qs最大偏差為0.31 p.u.,Us最大偏差為0.28 p.u.,LVRT下Qs最大偏差為0.13 p.u.,Us最大偏差為0.8 p.u.。而對(duì)于直流側(cè)母線電壓Udc,4種控制方案相差較大,HVRT下智能卸荷電路的Qs最大偏差值最小,為0.15 p.u.,相較于轉(zhuǎn)子卸荷電路幾乎下降了50%,調(diào)節(jié)效果大大提高。LVRT下,Qs偏差值最大的仍是轉(zhuǎn)子卸荷電路,為0.21 p.u.,智能卸荷電路和超級(jí)電容器儲(chǔ)能控制效果相當(dāng),為0.17 p.u.,略高于Chopper電路。對(duì)比說明,在Qs波動(dòng)幅值上,智能卸荷最為穩(wěn)定,轉(zhuǎn)子卸荷電路變化幅度最大。
圖9顯示了故障穿越過程中風(fēng)機(jī)參數(shù)的平均偏差量。

圖9 不同控制下風(fēng)機(jī)故障穿越參數(shù)平均偏差量Fig.9 Average deviation of DFIG fault ride through parameters under different control strategies
重度HVRT工況下,4種方案的并網(wǎng)點(diǎn)電壓Us和轉(zhuǎn)子側(cè)無功功率Qg平均偏差量相當(dāng),分別為0.25 p.u.和0.28 p.u.,而在網(wǎng)側(cè)有功功率Ps和轉(zhuǎn)子側(cè)有功功率Pg上,轉(zhuǎn)子卸荷電路的平均偏差量最大,是其他3種方案的2倍。直流母線電壓Udc和網(wǎng)側(cè)無功功率Qs平均偏差量最少的是智能卸荷電路和超級(jí)電容器控制,分別為0.09 p.u.和0.41 p.u.。重度LVRT工況下,Chopper電路、超級(jí)電容器控制和智能卸荷電路的風(fēng)機(jī)參數(shù)平均偏差量均相等,且Udc和Qs均明顯優(yōu)于轉(zhuǎn)子卸荷電路。從風(fēng)機(jī)參數(shù)的平均偏差量看,智能卸荷電路和超級(jí)電容器控制在故障穿越過程中的整體波動(dòng)較為平穩(wěn)。
圖10對(duì)比了4種電壓穿越控制方案下風(fēng)機(jī)故障后恢復(fù)穩(wěn)態(tài)所需時(shí)間。

圖10 不同控制下風(fēng)機(jī)故障穿越恢復(fù)過程的調(diào)節(jié)時(shí)間Fig.10 Adjustment time of DFIG fault through recovery process under different control strategies
重度HVRT下,直流母線電壓Udc恢復(fù)穩(wěn)定用時(shí)最短的是智能卸荷電路和超級(jí)電容器控制,需要0.4 s,優(yōu)于Chopper電路的0.58 s和轉(zhuǎn)子卸荷電路的0.98 s。網(wǎng)側(cè)功率恢復(fù)穩(wěn)定用時(shí)最短的仍是智能卸荷電路,4種方案的轉(zhuǎn)子側(cè)功率用時(shí)相當(dāng),為0.11 s。重度LVRT工況下,轉(zhuǎn)子卸荷電路的Udc、定子側(cè)功率所需調(diào)節(jié)時(shí)間最短,其次為智能卸荷電路,但在網(wǎng)側(cè)功率參數(shù)上,轉(zhuǎn)子卸荷電路恢復(fù)穩(wěn)態(tài)用時(shí)最長(zhǎng)為0.78 s,其他3種方案用時(shí)在0.58 s左右。
綜合對(duì)比圖8~10重度故障下風(fēng)機(jī)穿越過程中的參數(shù),智能卸荷電路的直流母線電壓抑制效果最佳,功率波動(dòng)幅值最小,且能在最短時(shí)間內(nèi)完成恢復(fù)調(diào)節(jié),電壓穿越方案最具優(yōu)勢(shì),超級(jí)電容器控制其次,且明顯優(yōu)于其他兩種方案。
圖11對(duì)比了重度故障工況下,雙饋風(fēng)電機(jī)組轉(zhuǎn)子側(cè)變流器的電流波形。
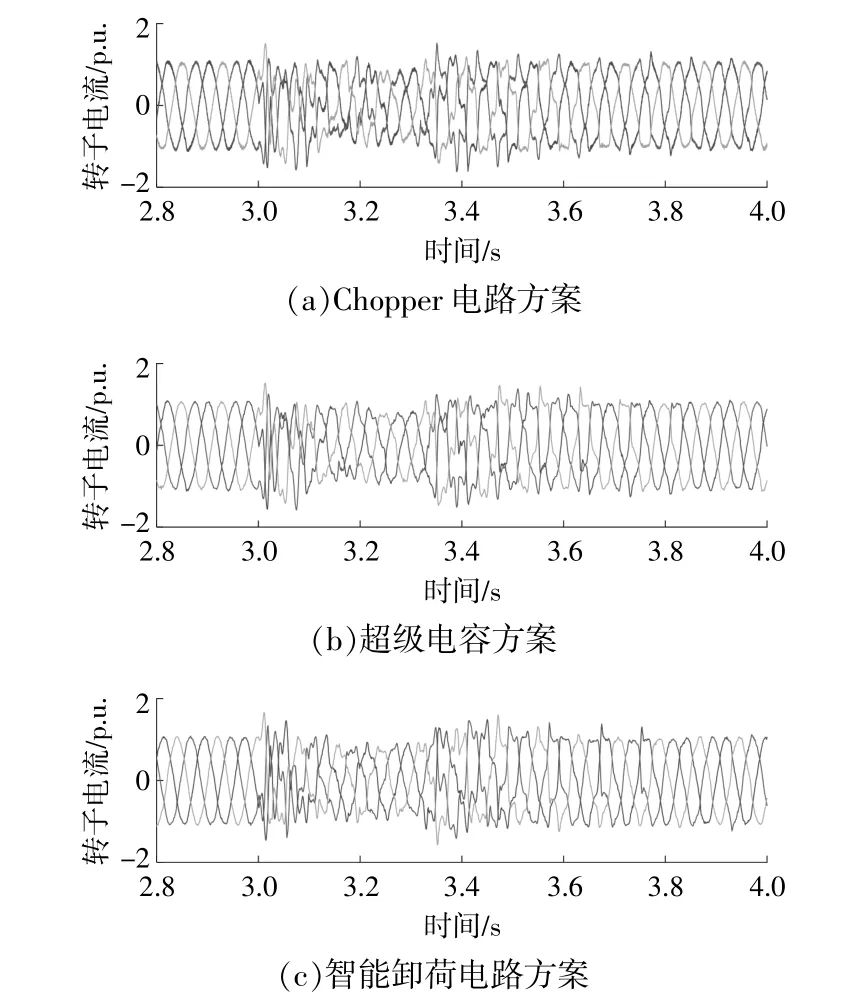
圖11 重度故障下DFIG 3種方案轉(zhuǎn)子側(cè)變流器波形對(duì)比Fig.11 DFIG rotor side converter waveform comparison of three schemes under severe fault
由圖11可見,智能卸荷電路和超級(jí)電容儲(chǔ)能方案的轉(zhuǎn)子電流波形較為平緩,故障期間電流波動(dòng)幅值小、次數(shù)少,而Chopper電路控制方案由于頻繁投切產(chǎn)生了直流電壓紋波,進(jìn)而使得電流波形畸變嚴(yán)重。因此,綜合對(duì)比風(fēng)電機(jī)組直流母線電壓抑制效果、電壓恢復(fù)所需調(diào)節(jié)時(shí)間、轉(zhuǎn)子電流畸變程度以及控制方案經(jīng)濟(jì)成本等多種因素,所提基于智能卸荷電路的風(fēng)電機(jī)組故障穿越控制策略最具優(yōu)勢(shì)。
4 結(jié)論
本文結(jié)合Chopper電路和超級(jí)電容儲(chǔ)能控制的優(yōu)勢(shì),提出了基于智能卸荷電路的風(fēng)電機(jī)組高低電壓故障穿越技術(shù)方案。所提方法對(duì)Chopper電路進(jìn)行改造,通過DC/DC變換器將卸荷電阻與風(fēng)機(jī)直流母線相連,并在控制電路中設(shè)置有功功率-直流電壓下垂環(huán)節(jié),使得智能卸荷電路能夠根據(jù)直流母線電壓幅值動(dòng)態(tài)吸收盈余能量,具有平滑調(diào)節(jié)卸荷功率的能力。同時(shí)依據(jù)并網(wǎng)點(diǎn)電壓波動(dòng)情況自動(dòng)開啟LVRT或HVRT模式,保證雙饋風(fēng)電機(jī)組在不同故障下均能成功穿越。本文在仿真系統(tǒng)中搭建了單機(jī)并網(wǎng)場(chǎng)景模型,對(duì)比了3種不同故障穿越方案的動(dòng)態(tài)響應(yīng)性能。結(jié)果表明,重度故障下,所提智能卸荷電路方案的故障穿越控制效果可以與超級(jí)電容控制方案相媲美,有效避免了Chopper電路頻繁投切引起的直流母線電壓波動(dòng)以及網(wǎng)側(cè)電壓、電流波形畸變,也大大降低了經(jīng)濟(jì)成本。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(hào)(2016年4期)2016-06-01 12:10:19
電測(cè)與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
- 可再生能源的其它文章
- 考慮分布式可再生能源不確定性的配電網(wǎng)可靠性評(píng)估
- 考慮可再生能源出力不確定性與碳排放成本的臺(tái)區(qū)運(yùn)行優(yōu)化策略研究
- 考慮注意力機(jī)制的CNN-LSTM高滲透風(fēng)電并網(wǎng)暫態(tài)電壓穩(wěn)定性研究
- 考慮碳配額及綜合需求響應(yīng)雙重激勵(lì)的綜合能源系統(tǒng)多主體博弈協(xié)同優(yōu)化
- 基于VC-綜合賦權(quán)法的海上風(fēng)電APF配置優(yōu)化方法研究
- 少開關(guān)低電壓應(yīng)力電流連續(xù)且共地的高增益Buck/Boost變換器